

-
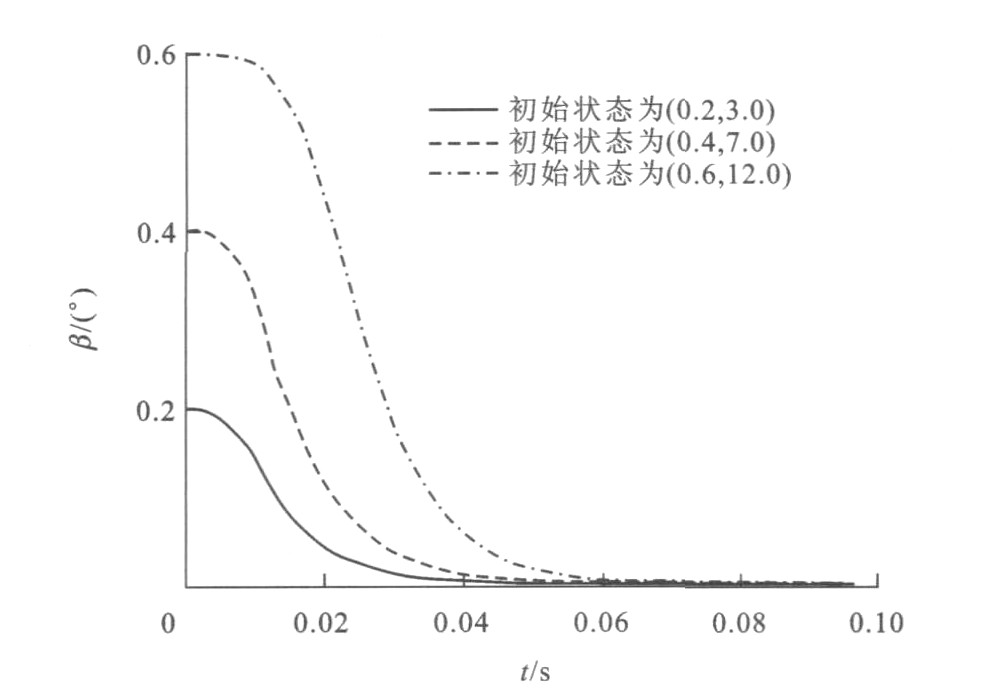
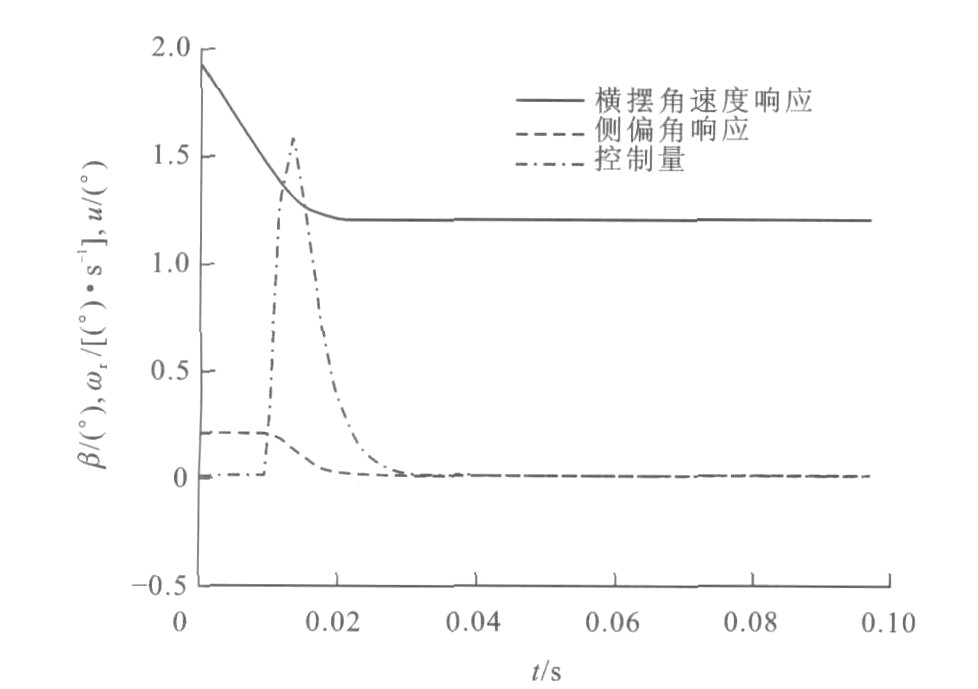
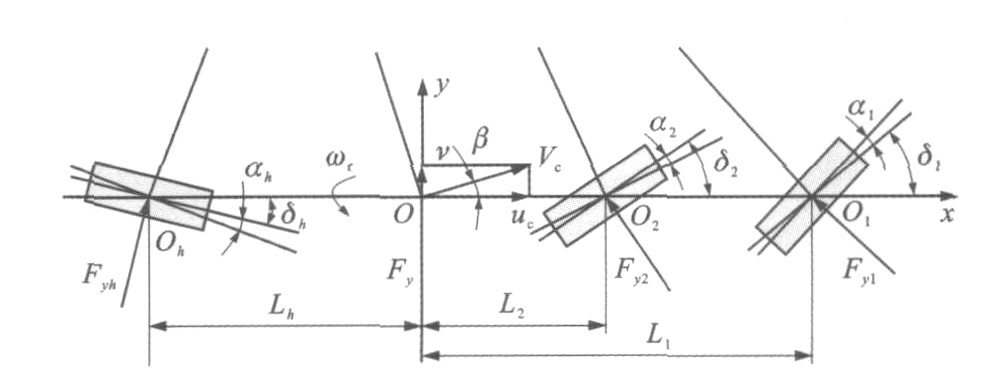
摘要: 为解决多轴转向车辆模型非线性和各种干扰影响下的控制问题, 分析了轮胎非线性和外界干扰, 建立多轴转向车辆的二自由度非线性模型, 应用T-S模糊理论, 将其转换为局部线性的T-S模糊模型。基于并行分配补偿法(PDC)和H∞鲁棒控制理论, 设计了转向系统的模糊PDC H∞鲁棒控制器, 并利用线性矩阵不等式和模糊逻辑控制工具求解控制器。在正弦波和阶跃信号干扰下, 车速为80 km·h-1时, 进行前轮转向回正和前轮角阶跃输入转向的仿真试验。仿真结果表明: 侧偏角和横摆角速度动态响应的超调均为0, 且均在0.06 s内达稳态值; 前轮转向回正试验的侧偏角和横摆角速度稳态值均为0, 前轮角阶跃输入转向试验的相应值分别为0和1.2(°)·s-1, 且稳态横摆角速度增益为0.24[(°)·s-1]·(°)-1。这说明了多轴转向车辆在模糊PDC H∞鲁棒控制下的高速转向平稳迅速, T-S模糊建模和鲁棒控制器设计算法对解决轮胎非线性和外界干扰影响是有效的。Abstract: To solve the control problem of multi-steering vehicle under the influences of model nonlinearity and all sorts of disturbances, tire nonlinearity and external disturbances were analyzed, and the nonlinear model of multi-steering vehicle with two degrees of freedom was established and converted into local linear T-S fuzzy model based on Takagi-Sugeno(T-S) fuzzy theory.Combining parallel distributed compensation method(PDC) with H∞ robust control theory, the fuzzy PDC H∞ robust controller of steering system was designed and solved by using linear matrix inequality(LMI) and fuzzy logic control(FLC) tools.With the disturbances of sine wave and step signal, when vehicle velocity was 80 km·h-1, the simulation experiments of front wheel steering returnability and front wheel steering with angle step input were carried out.Based on the dynamic responses of side slip angle and yaw rate, all overshoots are 0, and all times to reach steady values are within 0.06 s.In former experiment, the steady values of side slip angle and yaw rate are all 0.In latter experiment, the values are 0 and 1.2(°)·s-1 respectively, and the steady gain of yaw rate is 0.24 [(°)·s-1]·(°)-1.Simulation result indicates that high-speed multi-steering vehicle with fuzzy PDC H∞ robust control can steer smoothly and rapidly, and the T-S fuzzy modeling method and the designing method of robust controller are effective to solve the problems of tire nonlinearity and external disturbances for multi-steering vehicle.
-
表 1 仿真参数
Table 1. Simulation parameters
参数 数值 参数 数值 M/kg 39 280 C5 1.3 Iz/(kg·m2) 311 760 B1 0.828 69 L1/m 4.379 3 B2 0.828 69 L2/m 1.749 3 B3 0.828 69 L3/mm -7.332 0 B4 1.800 00 L4/m -1.860 7 B5 1.800 00 L5/m -3.720 7 D1/kg 7 560 C1 1.3 D2/kg 7 560 C2 1.3 D3/kg 7 560 C3 1.3 D4/kg 8 300 C4 1.3 D5/kg 8 300  下载: 导出CSV
下载: 导出CSV
-
[1] 姚永建, 韩强. 四轮转向汽车的非线性模型及其动力方程[J]. 华南理工大学学报: 自然科学版, 2003, 31(11): 49-52. doi: 10.3321/j.issn:1000-565X.2003.11.012YAO Yong-jian, HAN Qiang. Nonlinear model and its dynamic equations for4WS vehicles[J]. Journal of South China University of Technology: Natural Science Edition, 2003, 31(11): 49-52. (in Chinese). doi: 10.3321/j.issn:1000-565X.2003.11.012 [2] DAI L, HAN Q. Stability and Hopf bifurcation of a nonlin-ear model for a four-wheel-steering vehicle system[J]. Com-munications in Nonlinear Science and Numerical Simulation, 2004, 9(3): 331-341. doi: 10.1016/S1007-5704(02)00084-9 [3] 周玉财, 何仁, 陈士安, 等. 考虑空气力的车辆三自由度转向模型与状态方程[J]. 交通运输工程学报, 2009, 9(1): 29-34. doi: 10.3321/j.issn:1671-1637.2009.01.007ZHOU Yu-cai, HE Ren, CHEN Shi-an, et al. 3-DOF vehicle steering model and state equations based on considering air forces[J]. Journal of Traffic and Transportation Engineer-ing, 2009, 9(1): 29-34. (in Chinese). doi: 10.3321/j.issn:1671-1637.2009.01.007 [4] 杜峰, 魏朗, 李玉民. 模型跟踪四轮主动转向汽车的H∞控制[J]. 郑州大学学报: 工学版, 2007, 28(3): 112-116. https://www.cnki.com.cn/Article/CJFDTOTAL-ZZGY200703029.htmDU Feng, WEI Lang, LI Yu-min. H∞control for active four-wheel steering vehicle based on model track[J]. Journal of Zhengzhou University: Engineering Science, 2007, 28(3): 112-116. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZZGY200703029.htm [5] 杜峰, 魏朗, 赵建有. 基于状态反馈的四轮转向汽车最优控制[J]. 长安大学学报: 自然科学版, 2008, 28(4): 91-94. doi: 10.3321/j.issn:1671-8879.2008.04.021DU Feng, WEI Lang, ZHAO Jian-you. Optimization control of four-wheel steering vehicle based on state feedback[J]. Journal of Chang'an University: Natural Science Edition, 2008, 28(4): 91-94. (in Chinese). doi: 10.3321/j.issn:1671-8879.2008.04.021 [6] 杜峰, 魏朗, 赵建有. 车辆主动转向的变结构控制器设计[J]. 交通运输工程学报, 2009, 9(1): 35-39. doi: 10.3321/j.issn:1671-1637.2009.01.008DU Feng, WEI Lang, ZHAO Jian-you. Design of variable structure controller for active steering vehicle[J]. Journal of Traffic and Transportation Engineering, 2009, 9(1): 35-39. (in Chinese). doi: 10.3321/j.issn:1671-1637.2009.01.008 [7] AN S J, YI K, JUNG G, et al. Desired yaw rate and steering control method during cornering for a six-wheeled vehicle[J]. International Journal of Automotive Technology, 2008, 9(2): 173-181. doi: 10.1007/s12239-008-0022-9 [8] BAYAR K, UNLUSOY Y S. Steering strategies for multi-axle vehicles[J]. International Journal of Heavy Vehicle Sys-tems, 2008, 15(2/3/4): 208-236. doi: 10.1504/IJHVS.2008.022243 [9] 祁永宁, 陈南, 李普. 四轮转向车辆的直接横摆力矩控制[J]. 东南大学学报: 自然科学版, 2004, 34(4): 451-454. doi: 10.3321/j.issn:1001-0505.2004.04.007QI Yong-ning, CHEN Nan, LI Pu. Direct yaw-moment con-trol on four-wheel steering vehicles[J]. Journal of Southeast University: Natural Science Edition, 2004, 34(4): 451-454. (in Chinese). doi: 10.3321/j.issn:1001-0505.2004.04.007 [10] 吕红明, 陈南, 李普. 横摆率跟踪控制的4WS汽车闭环操纵稳定性[J]. 汽车工程, 2005, 27(3): 337-339, 376. doi: 10.3321/j.issn:1000-680X.2005.03.019LU Hong-ming, CHEN Nan, LI Pu. Closed-loop handling and stability of four-wheel steering vehicle with yaw-rate tracking control[J]. Automotive Engineering, 2005, 27(3): 337-339, 376. (in Chinese). doi: 10.3321/j.issn:1000-680X.2005.03.019 [11] 殷国栋, 陈南, 李普. 4WS汽车横摆角速度跟踪μ综合鲁棒控制[J]. 机械工程学报, 2005, 41(10): 221-225. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200510044.htmYIN Guo-dong, CHEN Nan, LI Pu. μ synthesis robust control for four-wheel steering vehicle based on yaw-rate tracking[J]. Chinese Journal of Mechanical Engineering, 2005, 41(10): 221-225. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200510044.htm [12] 殷国栋, 陈南. 4WS车辆μ综合鲁棒主动侧倾操纵性能控制[J]. 东南大学学报: 自然科学版, 2006, 36(3): 384-388. https://www.cnki.com.cn/Article/CJFDTOTAL-DNDX200603009.htmYIN Guo-dong, CHEN Nan. Active rollμsynthesis robust control for4WS vehicle steering performance[J]. Journal of Southeast University: Natural Science Edition, 2006, 36(3): 384-388. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DNDX200603009.htm [13] 陈宁, 陈南, 陈炎东. 四轮转向车辆分数阶控制方法研究[J]. 中国科学: 技术科学, 2010, 40(2): 139-144. https://www.cnki.com.cn/Article/CJFDTOTAL-JEXK201002006.htmCHEN Ning, CHEN Nan, CHEN Yan-dong. Research on fractional order control of four-wheel steering vehicle[J]. Scientia Sinica: Technologica, 2010, 40(2): 139-144. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JEXK201002006.htm [14] 李彬, 俞凡. 四轮主动转向的模型跟踪控制[J]. 上海交通大学学报, 2009, 43(10): 1531-1535. https://www.cnki.com.cn/Article/CJFDTOTAL-SHJT200910004.htmLI Bin, YU Fan. Model following control of four-wheel active steering vehicle[J]. Journal of Shanghai Jiaotong University, 2009, 43(10): 1531-1535. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-SHJT200910004.htm [15] 张孝祖, 李辉, 蔡双飞. 四轮转向车辆H2/H∞混合鲁棒控制与仿真[J]. 农业机械学报, 2008, 39(8): 14-17, 156. https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX200808005.htmZHANG Xiao-zu, LI Hui, CAI Shuang-fei. H2/H∞mixed robust control and simulation for4WS vehicle[J]. Transac-tions of the Chinese Society for Agricultural Machinery, 2008, 39(8): 14-17, 156. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX200808005.htm [16] GIANONE L, PALKOVICS L, BOKOR J. Design of an active4WS system with physical uncertainties[J]. Control Engineering Practice, 1995, 3(8): 1075-1083. https://www.sciencedirect.com/science/article/pii/096706619500099G [17] FANG Hao, DOU Li-hua, CHEN Jie, et al. Robust anti-sliding control of autonomous vehicles in presence of lateral disturbances[J]. Control Engineering Practice, 2011, 19(5): 468-478. https://www.sciencedirect.com/science/article/pii/S0967066111000189 [18] ALFI A, FARROKHI M. Hybrid state-feedback sliding-mode controller using fuzzy logic for four-wheel-steering vehicles[J]. Vehicle System Dynamics, 2009, 47(3): 265-284. doi: 10.1080/00423110801995727 [19] 田承伟, 宗长富, 何磊, 等. 汽车线控四轮转向控制策略[J]. 吉林大学学报: 工学版, 2010, 40(5): 1177-1182. https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY201005003.htmTIAN Cheng-wei, ZONG Chang-fu, HE Lei, et al. Control strategy of4WS steer-by-wire system[J]. Journal of Jilin University: Engineering and Technology Edition, 2010, 40(5): 1177-1182. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY201005003.htm [20] 李炎亮, 高秀华, 李占江, 等. 最优跟踪车载式自行火炮多桥动态转向系统[J]. 吉林大学学报: 工学版, 2006, 36(增2): 36-40. https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY2006S2007.htmLI Yan-liang, GAO Xiu-hua, LI Zhan-jiang, et al. Optimal tracking multi-axle dynamic steering system of truck-howitzer[J]. Journal of Jilin University: Engineering and Technology Edition, 2006, 36(S2): 36-40. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY2006S2007.htm [21] 王云超, 高秀华, 胡景煌, 等. 多轴转向车辆转向系统的H2/H∞混合控制[J]. 重庆工学院学报: 自然科学版, 2008, 22(8): 6-10. https://www.cnki.com.cn/Article/CJFDTOTAL-CGGL200808003.htmWANG Yun-chao, GAO Xiu-hua, HU Jing-huang, et al. Mixed H2/H∞control for multi-axle steering vehicle[J]. Journal of Chongqing Institute of Technology: Natural Science, 2008, 22(8): 6-10. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-CGGL200808003.htm [22] 张小江, 高秀华, 王云超. 车辆转向统一动力学模型及模型跟踪控制[J]. 农业工程学报, 2009, 25(11): 173-177. https://www.cnki.com.cn/Article/CJFDTOTAL-NYGU200911033.htmZHANG Xiao-jiang, GAO Xiu-hua, WANG Yun-chao. Uni-fied dynamical model of vehicle steering and model-following control[J]. Transactions of the CSAE, 2009, 25(11): 173-177. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-NYGU200911033.htm [23] 王欢, 高秀华, 张小江, 等. 状态反馈控制及观测器在多桥车辆转向中的应用[J]. 重庆大学学报, 2010, 33(10): 25-31. https://www.cnki.com.cn/Article/CJFDTOTAL-FIVE201010007.htmWANG Huan, GAO Xiu-hua, ZHANG Xiao-jiang, et al. Application of state feedback and observer in multi-axle vehicle steering system[J]. Journal of Chongqing University, 2010, 33(10): 25-31. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-FIVE201010007.htm [24] 吴忠强, 许世范, 岳东. 非线性系统的T-S模糊建模与控制[J]. 系统仿真学报, 2002, 14(2): 253-256. https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ200202034.htmWU Zhong-qiang, XU Shi-fan, YUE Dong. T-S fuzzy model-ing and control for nonlinear systems[J]. Journal of System Simulation, 2002, 14(2): 253-256. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ200202034.htm -



 点击查看大图
点击查看大图
图(5) / 表(1)
计量
- 文章访问数: 793
- HTML全文浏览量: 73
- PDF下载量: 915
- 被引次数: 0
