

Moving vehicle location method based on traffic wireless sensor network
Article Text (Baidu Translation)
-
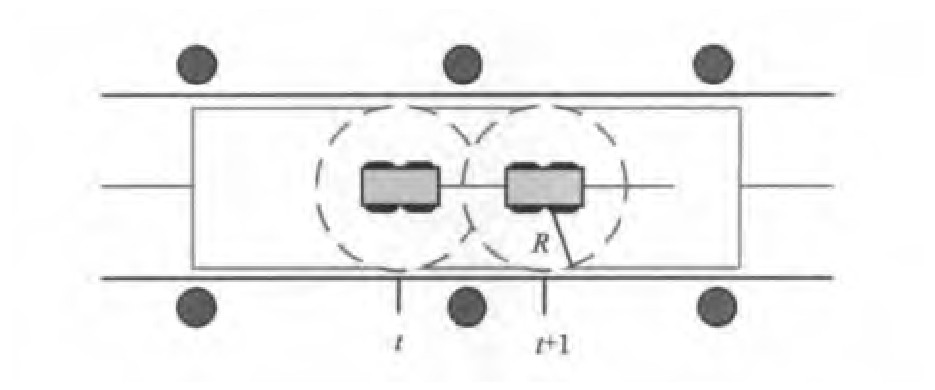
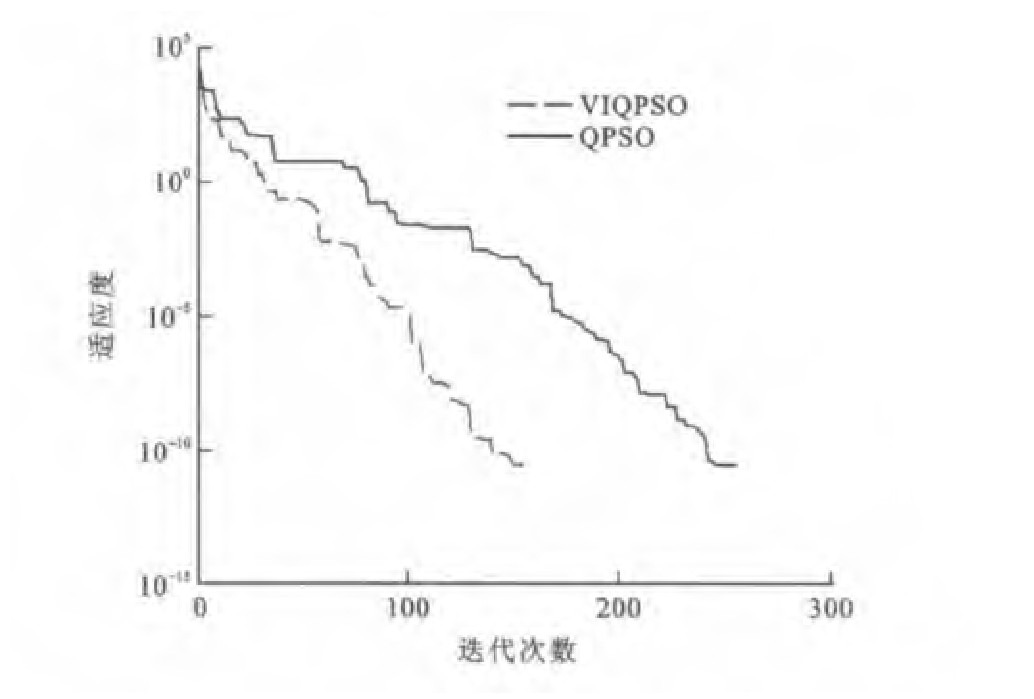
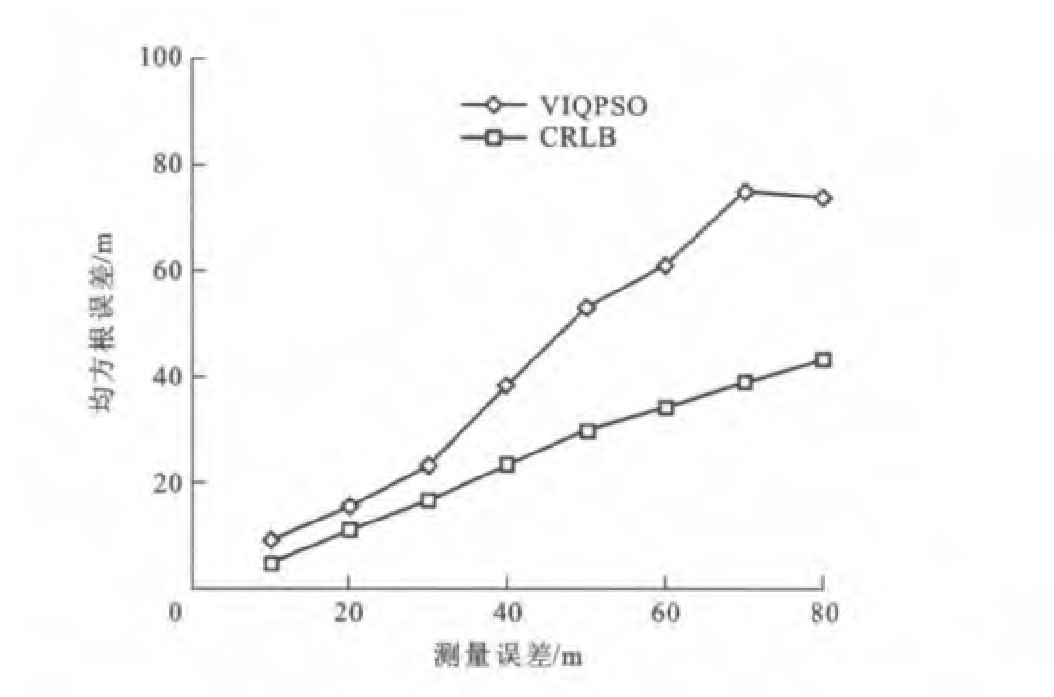
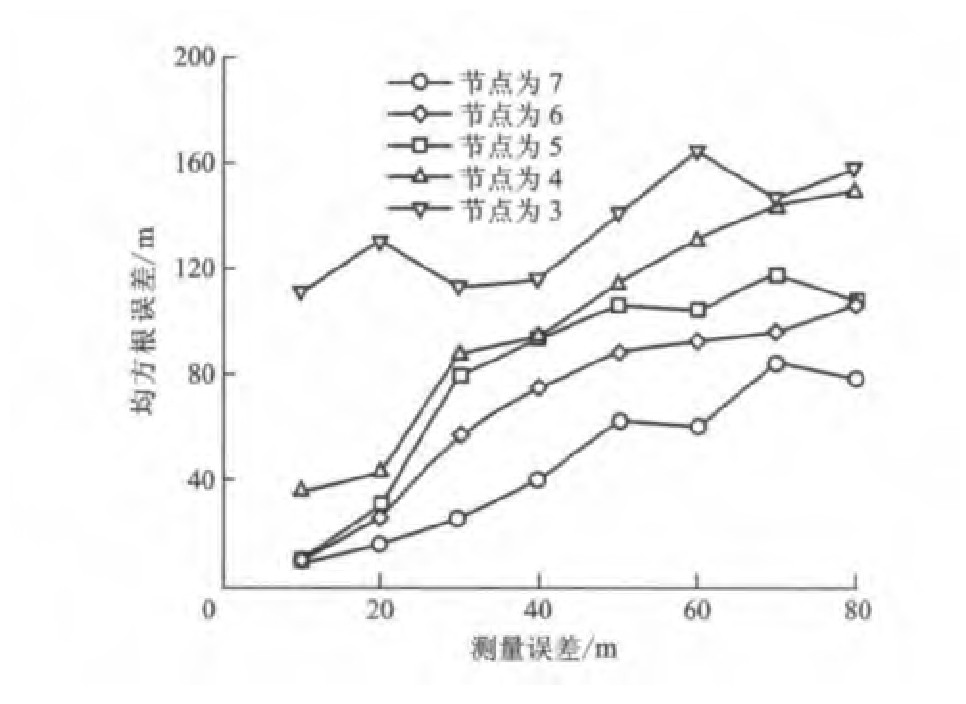
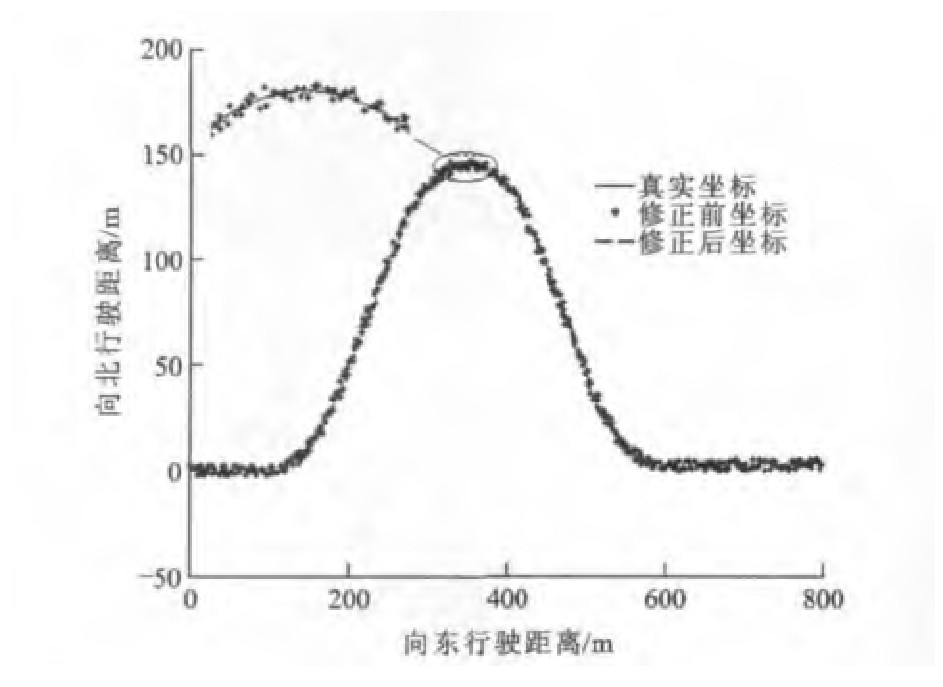
摘要: 为提高运动车辆定位可靠性与精度,研究了基于交通无线传感器网络的运动车辆定位系统。根据车辆位置区域随速度变化的规律,提出了一种变区间搜索量子粒子群算法对测量的车辆定位参量进行坐标粗估计,由于噪声干扰和信号传输延时,坐标粗估计值存在一定的误差。根据车辆的运动特性引入机动目标的当前统计模型,采用扩展Kalman滤波对坐标粗估计值存在的误差进行修正,以定位速度与精度为评价指标对定位方法进行了验证。验证结果表明:无线传感网络节点可大量布设的特点提高了定位可靠性;量子粒子群中引入变区间使定位速度提高了39.13%;Kalman误差修正使得定位精度提高了56.48%。可见,本文方法可以有效提高运动车辆定位速度与准确性。Abstract: To improve the location reliability and accuracy, moving vehicle location system based on traffic wireless sensor network was studied. Based on the law that vehicle location changed along with its speed, a variable interval quantum particle swarm optimization algorithm was proposed, by which the measured vehicle location parameters could be used for the rough estimation of vehicle coordinates. For the noise interferences and signal delay, the rough estimated values of vehicle coordinates were always prone to error. The current statistical model was introduced into the algorithm under the motion constraints of vehicle, and the extended Kalman filter was used to eliminate the location errors. The proposed method was tested by the evaluation indexes of speed and accuracy. Tested result indicates that the location reliability is improved for that the enormous sum nodes of wireless sensor network can be disposed. The variable interval introduced into the quantum particle swarm optimization increases the convergence speed by 39.13%. The Kalman filter corrects the errors, and improves location precision by 56.48%. The proposed algorithm demonstrates the superiority in terms of location reliability and accuracy.
-
[1] SOMDA F H, CORMERAIS H, BUISSON J. Intelligent transportation systems: a safe, robust and comfortable strategy for longitudinal monitoring[J]. IET Intelligent Transport Systems, 2009, 3(2): 188-197. doi: 10.1049/iet-its:20080042 [2] KOWSHIK H, CAVENEY D, KUMAR P R. Provable system wide safety in intelligent intersections[J]. IEEE Transactions on Vehicular Technology, 2011, 60(3): 804-818. doi: 10.1109/TVT.2011.2107584 [3] KAO W W. Integration of GPS and dead-reckoning navigation systems[C]//IEEE. Proceedings of Vehicle Navigation and Information Systems. Piscataway: IEEE, 1991: 635-643. [4] SHARAF R, NOURELDIN A, OSMAN A, et al. Online INS/GPS integration with a radial basis function neural network[J]. IEEE Aerospace Electronic System Magazine, 2005, 20(3): 8-14. doi: 10.1109/MAES.2005.1412121 [5] 于德新, 杨兆升, 刘雪杰. 基于卡尔曼滤波的GPS/DR导航信息融合方法[J]. 交通运输工程学报, 2006, 6(2): 65-69. doi: 10.3321/j.issn:1671-1637.2006.02.015YU De-xin, YANG Zhao-sheng, LIU Xue-jie. GPS/DR navigation data fusion method based on Kalman filter[J]. Journal of Traffic and Transportation Engineering, 2006, 6(2): 65-69. (in Chinese). doi: 10.3321/j.issn:1671-1637.2006.02.015 [6] 赵梅, 张三同, 朱刚. 改进粒子滤波算法在组合导航中的应用[J]. 中国公路学报, 2007, 20(2): 108-112. doi: 10.3321/j.issn:1001-7372.2007.02.021ZHAO Mei, ZHANG San-tong, ZHU Gang. Application of improved particle filter algorithm to integrated navigation[J]. China Journal of Highway and Transport, 2007, 20(2): 108-112. (in Chinese). doi: 10.3321/j.issn:1001-7372.2007.02.021 [7] LI H, NASHASHIBI F, TOULMINET G. Localization for intelligent vehicle by fusing mono-camera, low-cost GPS and map data[C]//IEEE. Proceeding of International IEEE Annual Conference on Intelligent Transportation System. Funchal: IEEE, 2010: 1657-1662. [8] DRAWIL N M, BASIR O. Intervehicle-communicationassisted localization[J]. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(3): 678-691. doi: 10.1109/TITS.2010.2048562 [9] JO K, CHU K, SUNWOO M. Interacting multiple model filter-based sensor fusion of GPS with in-vehicle sensors for real-time vehicle positioning[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(1): 329-343. doi: 10.1109/TITS.2011.2171033 [10] ALONSO I P, LIORCA D F, GAVILAN M, et al. Accurate global localization using visual odometry and digital maps on urban environments[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(4): 1535-1545. doi: 10.1109/TITS.2012.2193569 [11] BARBAGLI B, BENCINI L, MAGRINI I, et al. A real-time traffic monitoring based on wireless sensor network technologies[C]//IEEE. Proceedings of International Conference on Wireless Communication and Mobile Computing. Istanbul: IEEE, 2011: 820-825. [12] CHEN Wen-jie, CHEN Li-feng, CHEN Zhang-long, et al. A realtime dynamic traffic control system based on wireless sensor network[C]//IEEE. Proceedings of the International Conference on Parallel Processing Workshops. Columbus: IEEE, 2005: 258-264. [13] MARTINEZ F, TOH C K, CANO J C, et al. Emergency services in future intelligent transportation systems based on vehicular communication networks[J]. IEEE Intelligent Transportation Systems Magazine, 2010, 2(2): 6-20. doi: 10.1109/MITS.2010.938166 [14] BOUKERCHE A, OLIVEIRA H A B F, NAKAMURA E F. Vehicular Ad Hoc Networks: a new challenge for localizationbased systems[J]. Computer Communications, 2008(31): 2838-2849. [15] EBERHART R, KENNEDY J. A new optimizer using particle swarm theory[C]//IEEE. Proceedings of the6th International Symposium on Micro Machine and Human Science. Nagoya: IEEE, 1995: 39-43. [16] BERGH F. An analysis of particle swarm optimizers[D]. Pretoria: University of Pretoria, 2006. [17] 陈玲娟, 蒲云. 基于粒子群算法的双目标可靠性网络设计[J]. 交通运输工程学报, 2010, 10(5): 61-65. http://transport.chd.edu.cn/article/id/201005011CHEN Ling-juan, PU Yun. Dual-objective reliable network design based on particle swarm optimization[J]. Journal of Traffic and Transportation Engineering, 2010, 10(5): 61-65. (in Chinese). http://transport.chd.edu.cn/article/id/201005011 [18] SUN Jun, FENG Bin, XU Wen-bo. Particle swarm optimization with particles having quantum behavior[C]//IEEE. Proceedings of2004Congress on Evolutionary Computation. Portland: IEEE, 2004(2): 325-331. [19] COELHO L S. Gaussian quantum-behaved particle swarm optimization approaches for constrained engineering design problems[J]. Expert Systems with Applications, 2010, 37(2): 1676-1683. -

 下载:
下载:



 点击查看大图
点击查看大图
图(8) / 表(1)
计量
- 文章访问数: 752
- HTML全文浏览量: 90
- PDF下载量: 780
- 被引次数: 0
