

Loose navigation state algorithm of INS two-point calibration in horizontal damping state
-
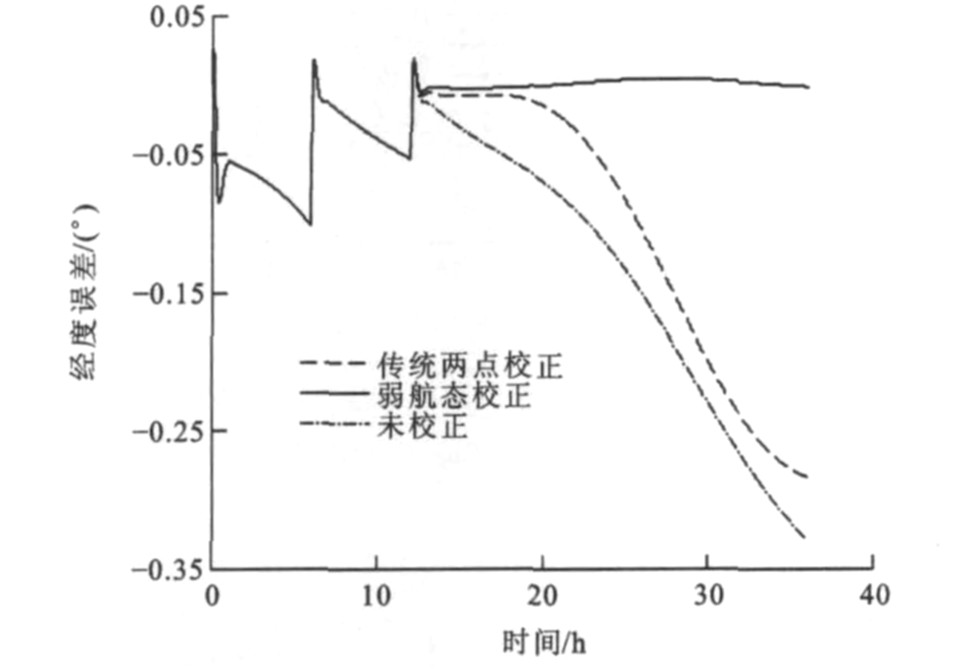
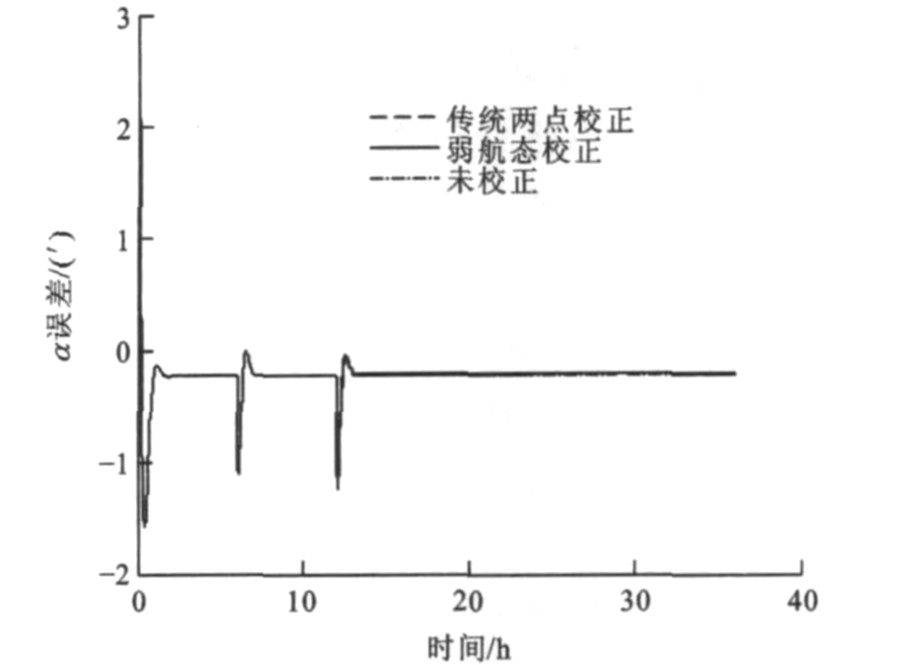
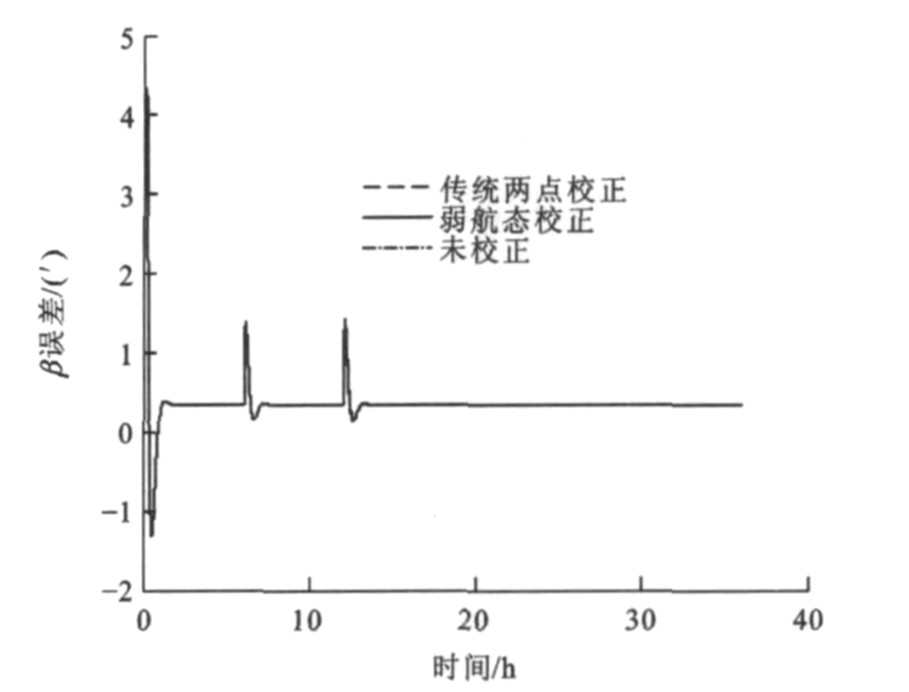
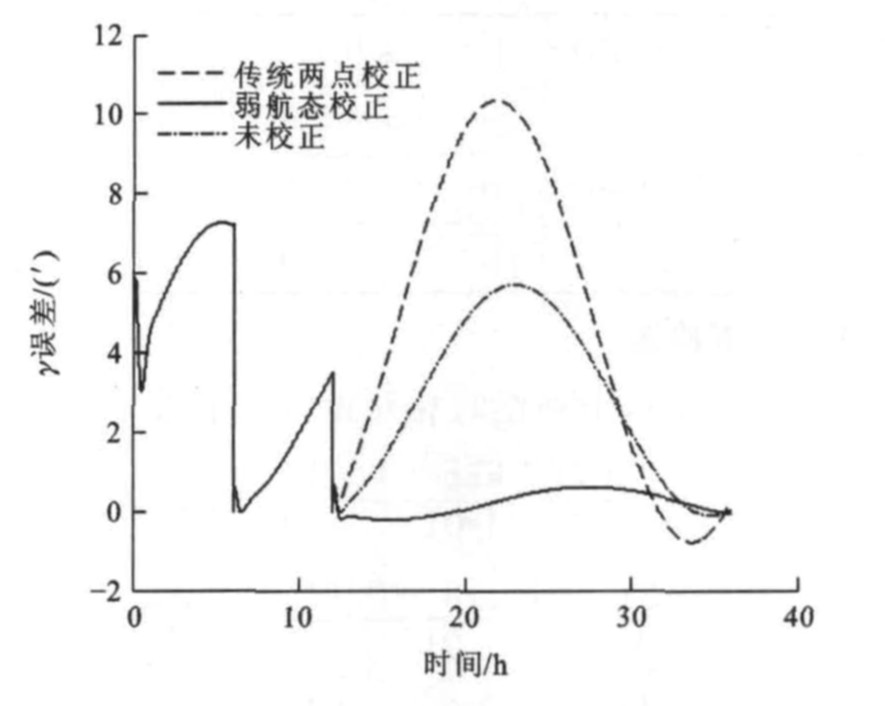
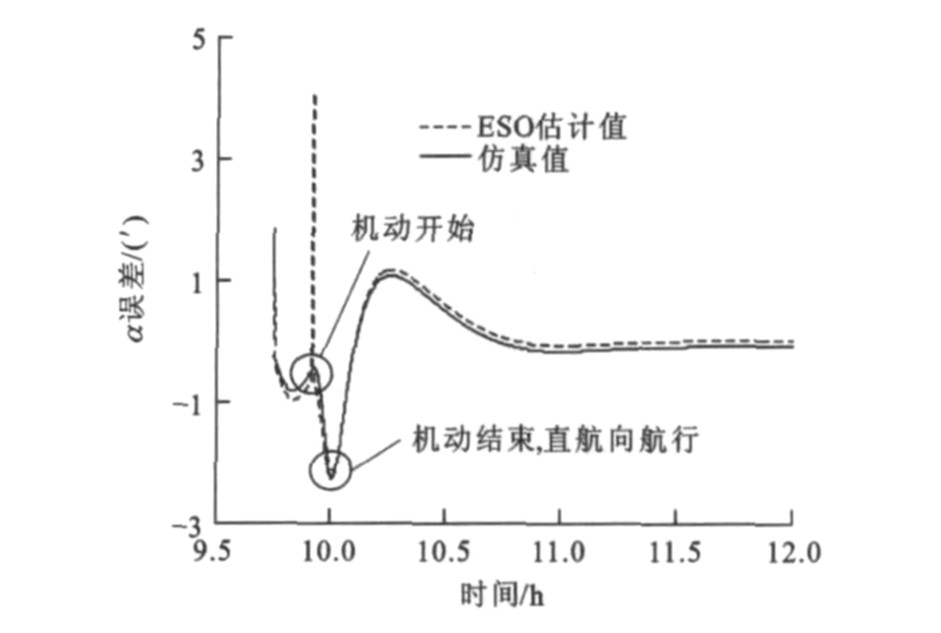
摘要: 为满足高精度导航要求, 提高综合校正精度, 应用扩张状态观测器设计了水平阻尼状态下惯导系统两点校正弱航态算法。简要分析了传统两点校正原理、航态约束及算法的不足, 利用扩张状态观测器实时估计惯导系统平台水平失调角, 并引入传统两点校正过程, 得出了两点校正的弱航态算法, 并对算法进行了仿真与数值检验。验证结果表明: 当载体不满足航态约束条件时, 传统两点校正估计结果大幅降低甚至发散, 而弱航态算法具有更强的适用性, 降低了载体的航态要求, 提高了综合校正精度, 试验1中东向、北向以及方位陀螺漂移校正误差分别由33.5%、51.2%、17.9%降至8.0%、1.8%、3.1%, 试验2中校正误差分别由83.7%、39.7%、77.5%降至2.3%、0.3%、1.0%。Abstract: In order to satisfy high-accuracy navigation and improve comprehensive calibration accuracy, a INS two-point calibration loose navigation state algorithm in horizontal damping state was designed by using extended state observer(ESO).The principle of traditional two-point calibration, navigation state constraint and its shortage were analyzed.The platform horizontal misalignment angles of inertial navigation system were real-timely estimated by using ESO, and traditional two-point calibration was introduced.The algorithm was simulated and numerically verified.Verification result indicates that the estimation result of traditional two-point calibration considerably reduces and even diverges when navigation state constraint can not be satisfied, neverthelessly, loose navigation state algorithm has a stronger applicability not only to reduce restrictive navigation state, but also to improve comprehensive calibration accuracy.Gyro drifts for east, north and position in experiment 1 reduce from 33.5%, 51.2%, 17.9% to 8.0%, 1.8%, 3.1% respectively, and in experiment 2, the drifts reduce from 83.7%, 39.7%, 77.5% to 2.3%, 0.3%, 1.0% respectively.
-
表 1 试验1结果比较
Table 1. Results comparison of experiment 1 (°)·h-1
陀螺漂移 设定值 未补偿 补偿后 εx 0.01 0.006 655 0.010 800 εy 0.015 116 0.010 180 εz 0.011 790 0.009 690  下载: 导出CSV
下载: 导出CSV
表 2 试验2结果比较
Table 2. Results comparison of experiment 2 (°)·h-1
陀螺漂移 设定值 未补偿 补偿后 εx 0.01 0.001 630 0.010 230 εy 0.006 030 0.010 030 εz 0.017 750 0.010 100
下载: 导出CSV
-
[1] 杨晓东, 邓太光. 平台式惯导系统两点校的常值误差分析[J]. 交通运输工程学报, 2011, 11(3): 100-104. doi: 10.3969/j.issn.1671-1637.2011.03.017YANG Xiao-dong, DENG Tai-guang. Constant error analysis of two-point comprehensive calibration in gimbaled inertial navigation system[J]. Journal of Traffic and Transportation Engineering, 2011, 11(3): 100-104. (in Chinese). doi: 10.3969/j.issn.1671-1637.2011.03.017 [2] HARTMAN R, HAWKINSON W, SWEENEY K. Tactical underwater navigation system position[C]//IEEE. 2008 IEEE Position Location and Navigation Symposium. Monterey: IEEE, 2008: 898-911. [3] 于堃, 李琳, 刘为任, 等. 舰船惯性导航系统海上无阻尼状态的校准[J]. 中国惯性技术学报, 2008, 16(6): 637-642. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ200806003.htmYU Kun, LI Lin, LIU Wei-ren, et al. Correction of SINS based on undamped navigation mode[J]. Journal of Chinese Inertial Technology, 2008, 16(6): 637-642. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ200806003.htm [4] 关劲, 程建华, 吴磊, 等. 船用平台式惯导系统状态转换技术的应用[J]. 中国造船, 2008, 49(2): 75-80. doi: 10.3969/j.issn.1000-4882.2008.02.010GUAN Jin, CHENG Jian-hua, WU Lei, et al. The state switch technology of gimbaled INS[J]. Shipbuilding of China, 2008, 49(2): 75-80. (in Chinese). doi: 10.3969/j.issn.1000-4882.2008.02.010 [5] 张卫明, 张继惟, 范子杰, 等. UKF方法在惯性导航系统初始对准中的应用研究[J]. 系统工程与电子技术, 2007, 29(4): 589-592. doi: 10.3321/j.issn:1001-506X.2007.04.023ZHANG Wei-ming, ZHANG Ji-wei, FAN Zi-jie, et al. Research on unscented Kalman filter in initial alignment of inertial navigation systems[J]. Systems Engineering and Electronics, 2007, 29(4): 589-592. (in Chinese). doi: 10.3321/j.issn:1001-506X.2007.04.023 [6] 卢敏, 殷勇. UPF算法在惯导非线性初始对准中的应用[J]. 雷达科学与技术, 2008, 6(1): 44-47. doi: 10.3969/j.issn.1672-2337.2008.01.008LU Min, YIN Yong. Application of unscented particle filter in INS non-linear alignment[J]. Radar Science and Technology, 2008, 6(1): 44-47. (in Chinese). doi: 10.3969/j.issn.1672-2337.2008.01.008 [7] 宋金来, 韩京清. 平台式惯导系统的快速初始对准方法的研究[J]. 中国惯性技术学报, 2002, 10(1): 25-29. doi: 10.3969/j.issn.1005-6734.2002.01.006SONG Jin-lai, HAN Jing-qing. Research on a fast initial alignment method for platform inertial navigation system[J]. Journal of Chinese Inertial Technology, 2002, 10(1): 25-29. (in Chinese). doi: 10.3969/j.issn.1005-6734.2002.01.006 [8] 王超, 马林立. 扩张状态观测器在惯导系统初始对准中的应用研究[J]. 舰船科学技术, 2009, 31(7): 85-88. doi: 10.3404/j.issn.1672-7649.2009.07.018WANG Chao, MA Lin-li. Application of the extend state observer on the initial alignment of the inertial navigationsystem[J]. Ship Science and Technology, 2009, 31(7): 85-88. (in Chinese). doi: 10.3404/j.issn.1672-7649.2009.07.018 [9] 牛立, 李莉, 赵慧, 等. 自抗扰控制技术在捷联惯导动基座初始对准中的应用研究[J]. 中国惯性技术学报, 2003, 11(6): 27-33. doi: 10.3969/j.issn.1005-6734.2003.06.006NIU Li, LI Li, ZHAO Hui, et al. Application of active disturbance rejection control technique in initial alignment of SINS on moving base[J]. Journal of Chinese Inertial Technology, 2003, 11(6): 27-33. (in Chinese). doi: 10.3969/j.issn.1005-6734.2003.06.006 [10] 赵汪洋, 庄良杰, 杨功流. 自抗扰控制器在平台惯导系统动基座下初始对准应用[J]. 控制与决策, 2007, 22(2): 179-183. doi: 10.3321/j.issn:1001-0920.2007.02.012ZHAO Wang-yang, ZHUANG Liang-jie, YANG Gong-liu. Application of active disturbance rejection controller in initial alignment of INS on moving base[J]. Control and Decision, 2007, 22(2): 179-183. (in Chinese). doi: 10.3321/j.issn:1001-0920.2007.02.012 [11] 宋金来, 杨雨, 许可康, 等. 自抗扰控制在惯性导航系统初始对准中的应用[J]. 中国惯性技术学报, 2001, 9(4): 11-14, 27. doi: 10.3969/j.issn.1005-6734.2001.04.003SONG Jin-lai, YANG Yu, XU Ke-kang, et al. Application of active disturbance rejection technique in initial alignment of inertial navigation system[J]. Journal of Chinese Inertial Technology, 2001, 9(4): 11-14, 27. (in Chinese). doi: 10.3969/j.issn.1005-6734.2001.04.003 [12] 杨常松, 徐晓苏, 汪丽云, 等. 信息融合技术在INS/GPS/DVL组合导航中的应用研究[J]. 中国惯性技术学报, 2006, 14(5): 39-43. doi: 10.3969/j.issn.1005-6734.2006.05.011YANG Chang-song, XU Xiao-su, WANG Li-yun, et al. Information fusion technology and its application in INS/GPS/DVL integrated navigation[J]. Journal of ChineseInertial Technology, 2006, 14(5): 39-43. (in Chinese). doi: 10.3969/j.issn.1005-6734.2006.05.011 [13] 李家齐, 王红卫, 刘爱东, 等. 一种天文/惯性导航系统组合模式的研究[J]. 控制理论与应用, 2005, 24(4): 13-15. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDHJ200504004.htmLI Jia-qi, WANG Hong-wei, LIU Ai-dong, et al. A CNS/INS combined navigation system[J]. Control Theory and Applications, 2005, 24(4): 13-15. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZDHJ200504004.htm [14] FANG Jiang-cheng, WAN De-jun. A fast initial alignment method for strapdown inertial navigation system on stationary base[J]. IEEE Transactions on Aerospace and Electronic Systems, 1996, 32(4): 1501-1505. doi: 10.1109/7.543871 [15] HUANG Yi, HAN Jing-qing. Disturbace rejection and tracting design via the SSR aproach for second order uncertionsystems[J]. System Sciences and Mathematical Sciences, 1999, 12(3): 238-245. [16] 赵汪洋, 吴俊杰, 庄良杰, 等. 基于ESO技术的惯导系统初始对准[J]. 数据采集与处理, 2007, 22(1): 105-109. doi: 10.3969/j.issn.1004-9037.2007.01.018ZHAO Wang-yang, WU Jun-jie, ZHUANG Liang-jie, et al. Initial alignments of inertial navigation system on static base with ESO technique[J]. Journal of Data Acquisition and Processing, 2007, 22(1): 105-109. (in Chinese). doi: 10.3969/j.issn.1004-9037.2007.01.018 [17] HUANG Yi, HAN Jing-qing. Analysis and design for the second order nonlinear continuous extended state observer[J]. Chinese Science Bulletin, 2000, 45(21): 1938-1944. doi: 10.1007/BF02909682 [18] 牛立, 李莉, 庄良杰. 惯性平台稳定回路的自抗扰控制[J]. 中国惯性技术学报, 2004, 12(6): 48-51, 64. doi: 10.3969/j.issn.1005-6734.2004.06.011NIU Li, LI Li, ZHUANG Liang-jie. Active disturbance rejection control of stabilizing circuits for inertial platform[J]. Journal of Chinese Inertial Technology, 2004, 12(6): 48-51, 64. (in Chinese). doi: 10.3969/j.issn.1005-6734.2004.06.011 -

 点击查看大图
点击查看大图
图(9) / 表(2)
计量
- 文章访问数: 561
- HTML全文浏览量: 92
- PDF下载量: 840
- 被引次数: 0
