

-
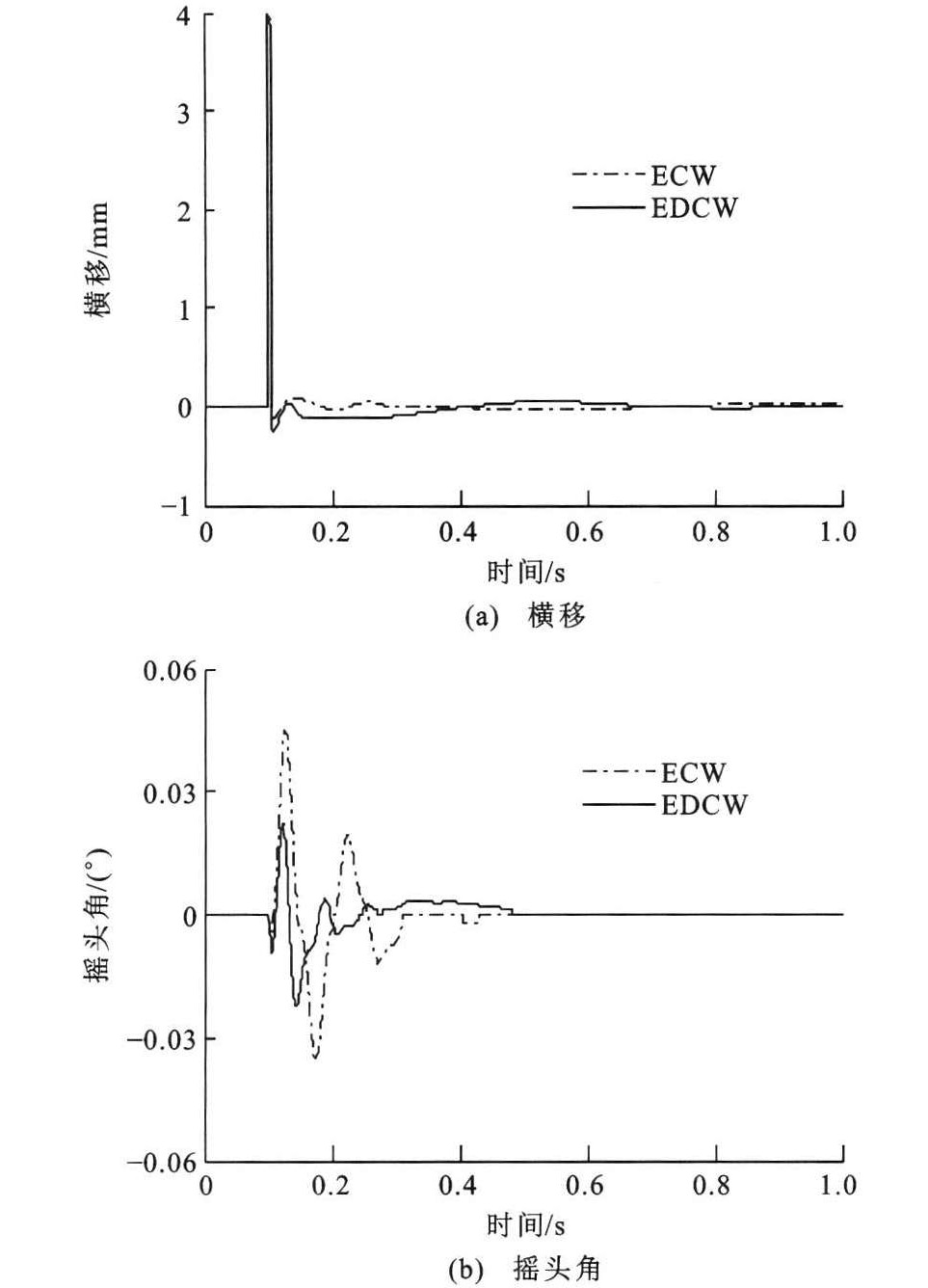
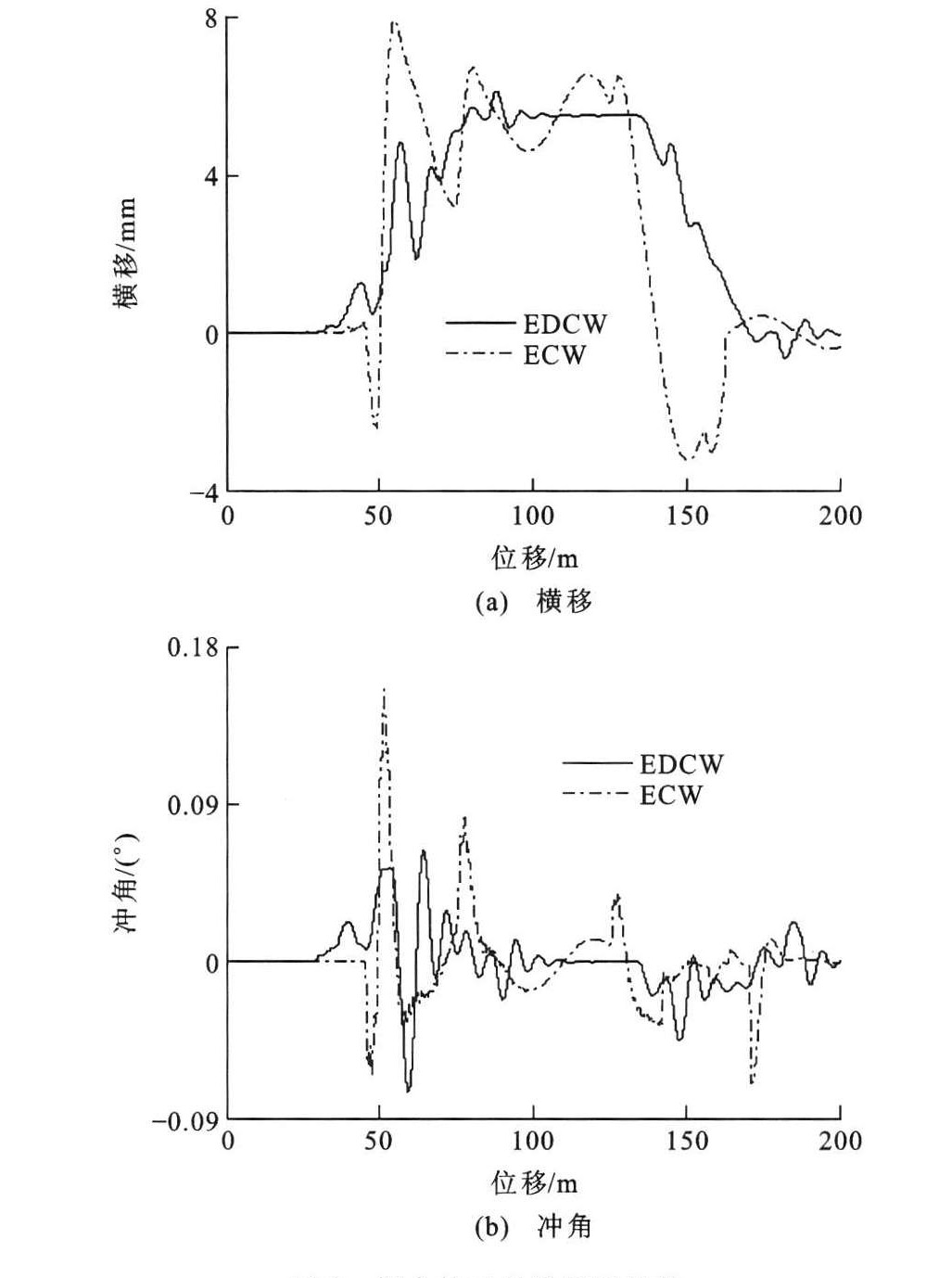
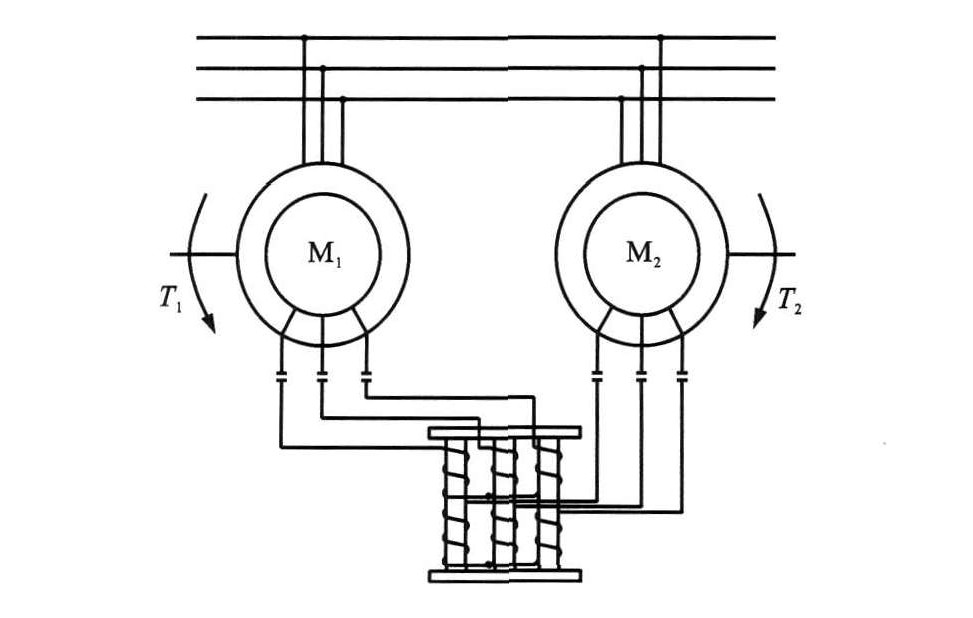
摘要: 针对独立车轮自导向性能差的问题, 应用改进电轴技术在轻轨车辆电机单独驱动独立车轮中, 形成一种电气耦合轮对型式, 以无形的电轴替代传统的机械轴, 改善导向性能。从电路分析理论出发, 分析了新型耦合轮对的耦合性能和影响因素, 确定电气耦合轮对是一种对左右车轮转角差自动施加反馈控制的技术, 且轮对耦合的强弱可通过调节电容与电阻实现, 调节电容方案因能耗低而优于调节电阻方案。建立电气耦合轮对和弹性阻尼耦合轮对轻轨车辆横向动力学模型, 分析了轮对的转向行为。仿真结果表明: 电气耦合轮对耦合力矩最大达到近1 kN·m, 耦合能力强; 直线上受激扰后, 2种车辆的横移量与摇头角自行趋于0, 通过曲线时, 横移量稳定值小于8 mm, 摇头角小于0.2°, 因此, 2种耦合轮对车辆具有直线对中能力和曲线通过性能; 通过小曲线时, 电机因电气耦合而造成的最大耗能功率低于140 W, 系统能耗低。Abstract: A new coupled wheelset was proposed by electrical coupled method to improve the self-steering behavior of independently rotating wheel. The improved electrical shaft system was applied in LRV(light railway vehicle) with motor independently driven wheels to construct the ECW(electrical coupled wheelset).An invisible electrical shaft replaced the conventional mechanical shaft between the motor-driven wheels. The coupled capacity and influencing factors of ECW were studied based on circuit analysis theory.It was ascertained that oriented mechanism of ECW was an active feedback control technology, and the rotating angular difference between left and right wheels was taken as feedback signal. The coupled capacity was adaptive by adjusting capacitance or resistance.It was better method for regulating capacitance than resistance as low power consumption.The numerical models of LRVs with ECW and EDCW(elasto-damper coupled wheelset) were established to simulate the steering behavior. Simulation result indicates that the maximum coupled torque of ECW is near to 1 kN·m, so the coupled ability is more powerful.LRVs with ECW and EDCW finally run along the center line of straight track after inputting a excitation, and their lateral displacements and attack angles are respectively less than 8 mm and 0.2° while vehicle runs on curve track, so they have good centering ability and curve negotiation.It's a low-power cost for electrical coupled system to produce coupled torque, and the maximum consumption power of motor is no more than 140 W when vehicle runs on the small radius curve track.
-
Key words:
- vehicle engineering /
- LRV /
- electrical shaft technology /
- coupled wheelset /
- steering behavior
-

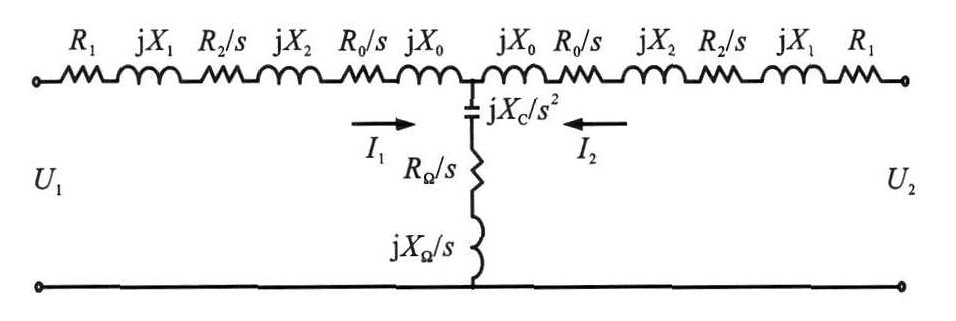
图 2 改进的电轴系统一相等效电路
Figure 2. Single-phase equivalent circuit of improved electrical shaft system

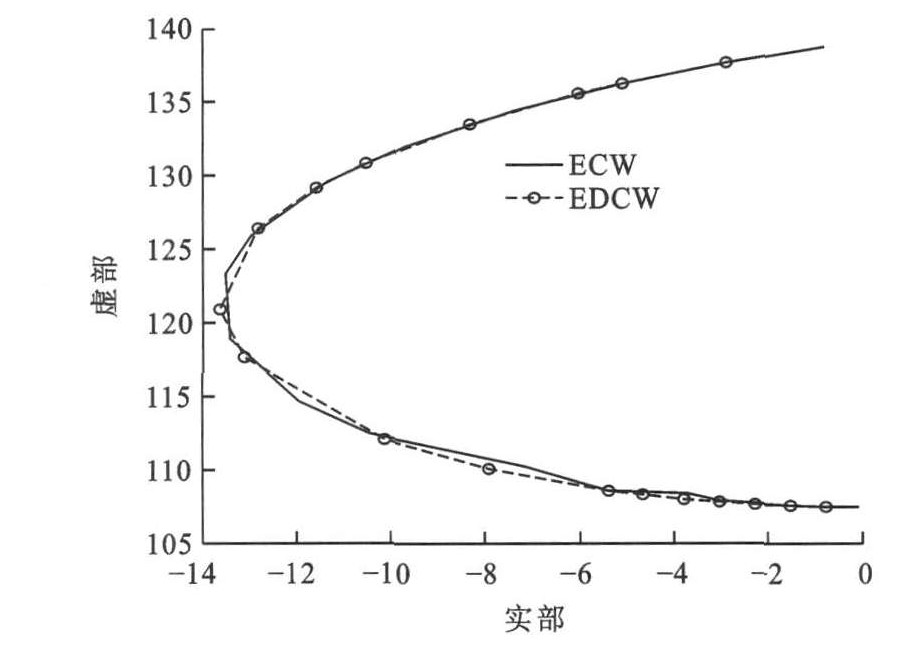
图 5 EDCW和ECW的横移特征根分布
Figure 5. Eigenvalue loci of lateral displacements of EDCW and ECW
表 1 双电机驱动独立车轮轮对转向架
Table 1. Bogies with IRW driven by double motors
转向架 驱动电机 生产商 运营城市 Eurotram 四电机 Bombardier 斯特拉夫堡 Incentro 四电机 Bombardier 南特 R3.1 四轮毂电机 Siemens AG 法兰克福 Tram 2000 两轮毂电机 Bombardier 布鲁塞尔 Variotram 四轮毂电机 ABB Henschel 开姆尼斯  下载: 导出CSV
下载: 导出CSV
表 2 轻轨车辆动力学模型主要参数
Table 2. Main parameters of LRV dynamics model
变量名称 符号 数值 轮对质量/kg mw 1 250 构架质量/kg mt 2 500 车体质量/kg mc 22 000 轮对转动惯量/(kg·m2) Iwx/Iwy/Iwz 700/100/700 构架转动惯量/(kg·m2) Itx/Ity/Itz 1 500/1 000/2 500 车体转动惯量/(kg·m2) Icx/Icy/Icz 4×104/2×106/2×106 每轴箱一系(纵/横/垂向)刚度/(MN·m-1) Kpx/Kpy/Kpz 10/5/1 每轴箱一系阻尼/(kN·s·m-1) Cpx/Cpy/Cpz 5/5/1 每构架一侧二系刚度/(MN·m-1) Ksx/Ksy/Ksz 0.25/0.25/0.40 每构架一侧二系阻尼/(kN·s·m-1) Csx/Csy/Csz 1/60/60 滚动圆跨距之半/m b 0.75 轴距之半/m Lt 1 定距之半/m Lh 5 一系悬挂横向跨距之半/m Lpy 1 二系悬挂横向跨距之半/m Lsy 1 车轮半径/m r0 0.3 纵/横向蠕滑系数 f1/f2 1.149 4×107/9.671 5×106 车轮等效锥度 λ 0.2
下载: 导出CSV
表 3 ECW轻轨车辆各轮对状态
Table 3. Wheelsets states of LRV with ECW
轮对 最大横移/mm 最大冲角/(°) 最大耦合力矩/(N·m) 最大电机耦合消耗功率/W 1 8.1 0.149 741.5 71.6 2 7.9 0.183 706.4 63.6 3 8.2 0.172 904.2 136.7 4 7.8 0.195 925.6 126.9
下载: 导出CSV
-
[1] BENINGTON C K, GREENHORN J W R. A proposal for improving the performance of a two-axle rail-guided vehicle[J]. Journal of Mechanical Engineering Science, 1971, 13(3): 157-167. doi: 10.1243/JMES_JOUR_1971_013_028_02 [2] MEI T X, GOODALL R M. Practical strategies for controlling railway wheelsets independently rotating wheels[J]. Dynamic Systems, Measurement, and Control, 2003, 125(3): 354-360. doi: 10.1115/1.1592191 [3] 池茂儒. 耦合轮对车辆动力学性能的研究[D]. 成都: 西南交通大学, 2003.CHI Mao-ru. A study on dynamics performance of the vehicle with coupled wheelset[D]. Chengdu: Southwest Jiaotong University, 2003. (in Chinese). [4] 任利惠, 周劲松, 沈钢. 一种基于转速反馈的独立轮对的主动导向控制方法[J]. 中国铁道科学, 2006, 27(1): 90-93. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK200601017.htmREN Li-hui, ZHOU Jin-song, SHEN Gang. An approach of active steering of independently rotating wheelsets based on feedback of wheels rotation speed[J]. China Railway Science, 2006, 27(1): 90-93. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK200601017.htm [5] 任利惠, 周劲松, 沈钢. 采用轮毂电机的独立车轮轮对的主动导向控制[J]. 中国铁道科学, 2010, 31(5): 77-83. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK201005015.htmREN Li-hui, ZHOU Jin-song, SHEN Gang. The active steering control of the independent wheelset with the hub motors[J]. China Railway Science, 2010, 31(5): 77-83. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK201005015.htm [6] 孙效杰. 电气耦合独立车轮转向架导向技术研究[D]. 成都: 西南交通大学, 2010.SUN Xiao-jie. A study on steering technology of bogie with electrical coupling independently rotating wheel[D]. Chengdu: Southwest Jiaotong University, 2010. (in Chinese). [7] SUN Xiao-jie, LU Zheng-gang, ZHOU Wen-xiang. A new coupled wheelsets of railway vehicles[C]∥IWNICKI S. Proceedings of the22nd IAVSD Symposium. Manchester: Manchester Metropolitan University, 2011: 1-6. [8] 王欢, 戴焕云, 池茂儒. 国外100%低地板轻轨车动力转向架纵览[J]. 内燃机车, 2007(12): 1-6. doi: 10.3969/j.issn.1003-1820.2007.12.001WANG Huan, DAI Huan-yun, CHI Mao-ru. Motor bogie of foreign LRV with all-low-floor[J]. Diesel Locomotives, 2007(12): 1-6. (in Chinese). doi: 10.3969/j.issn.1003-1820.2007.12.001 [9] 赵明花. 低地板车辆的研制[J]. 都市快轨交通, 2010, 23(5): 13-16. https://www.cnki.com.cn/Article/CJFDTOTAL-DSKG201005014.htmZHAO Ming-hua. Development and manufacture of low-floor vehicles[J]. Urban Rapid Rail Transit, 2010, 23(5): 13-16. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DSKG201005014.htm [10] 许明春, 曾京. 纵向耦合独立旋转车轮转向架导向机理[J]. 交通运输工程学报, 2011, 11(1): 43-50. http://transport.chd.edu.cn/article/id/201101008XU Ming-chun, ZENG Jing. Guiding mechanism of longitudinal coupling bogie with independently rotating wheels[J]. Journal of Traffic and Transportation Engineering, 2011, 11(1): 43-50. (in Chinese). http://transport.chd.edu.cn/article/id/201101008 [11] AKAYLEH A, ABDALLAH S. The systems of synchronous rotation in the base of electromagnetic working shaft with insertion capacitances in the rotors coils[J]. Jordanian Journal of Applied Science: Natural Sciences, 2005, 7(1): 1-10. [12] 任利惠. 独立车轮导向技术研究[D]. 上海: 同济大学, 2006.REN Li-hui. The study on method to enhancing steering capibility of independently rotating wheels[D]. Shanghai: Tongji University, 2006. (in Chinese). [13] 王军平, 黄运华, 陈倩, 等. 弹性阻尼耦合轮对动力学特性分析[J]. 铁道机车车辆, 2012, 32(4): 44-49. https://www.cnki.com.cn/Article/CJFDTOTAL-TDJC201204012.htmWANG Jun-ping, HUANG Yun-hua, CHEN Qian, et al. Analysis of dynamic characteristics of elasto damper coupled wheelset[J]. Railway Locomotive and Car, 2012, 32(4): 44-49. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-TDJC201204012.htm -


 点击查看大图
点击查看大图
计量
- 文章访问数: 519
- HTML全文浏览量: 118
- PDF下载量: 730
- 被引次数: 0
