

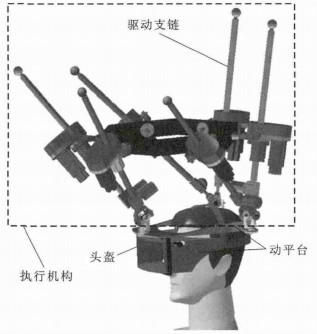
Parameter identification method of motion platform of helmet mounted display servo system
-
摘要: 分析了头盔显示器伺服系统动平台参数的不确定性与时变性, 推导了连续-离散扩展卡尔曼滤波(CDEKF)与连续-离散平方根无味卡尔曼滤波(CDSR-UKF)的辨识过程, 结合头盔显示器伺服系统的动力学模型建立了系统动平台参数的辨识模型, 并通过仿真试验对比分析了CDEKF和CDSRUKF的辨识效果。设计了动平台参数的突变试验过程, 通过试验对CDSR-UKF的实用性进行了检验。仿真结果表明: CDEKF与CDSR-UKF的标准误差比值范围为1.9~6.3, 收敛时间比值范围为1.0~27.7, 均方根误差的比值范围为1.4~11.0, 后者的计算精度、稳定性和收敛速度均要优于前者, 且后者的平均收敛时间约为0.002s, 具有较好的在线辨识性能; CDSR-UKF的辨识误差小于10%, 对大幅度突变和一般幅度突变参数的辨识收敛时间分别约为0.30s和0.04s, 能较好地跟踪参数的变化过程, 可满足正常使用情况下的头盔显示器伺服系统动平台参数辨识要求。Abstract: The nondeterminacies and time-varying characteristics of parameters for motion platform of helmet mounted display servo system(HMDSS)were analyzed, the identification processes of continuous-discrete extended Kalman filter(CDEKF) and continuous-discrete square-root unscented Kalman filter(CDSR-UKF)were derived, the parameter identification model of motion platform of HMDSS was presented based on the system dynamics model, and the identification effects of CDEKF and CDSR-UKF were compared by simulation.The mutation experiment of parameters for motion platform was designed and implemented to verify the practicability of CDSR-UKF.Simulation result indicates that the standard error ratios, convergence time ratios and root mean square error ratios of CDEKF to CDSR-UKF are 1.9-6.3, 1.0-27.7and 1.4-11.0, which means that CDSR-UKF has higher identification precision, stability and convergence velocity than CDEKF.The average convergence time of CDSR-UKF is about 0.002 s, so CDSRUKF has better capacity of real-time identification.The online estimation error of CDSR-UKF is less than 10%, and the convergence times against large parameter mutation and normal parameter mutation are about 0.30 sand 0.04 srespectively, so CDSR-UKF can well trace changingprocesses of identification parameters and satisfy parameter identification requirements of motion platform of HMDSS in normal usage environment.
-

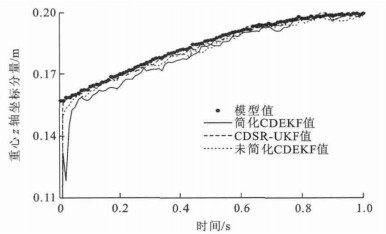
图 5 重心z轴坐标分量的仿真结果比较
Figure 5. Comparison of simulation results about component of center of gravity along axis z

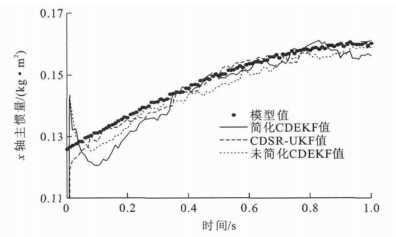
图 6 x轴主惯量的仿真结果比较
Figure 6. Comparison of simulation results about principal moment of inertia relative to axis x

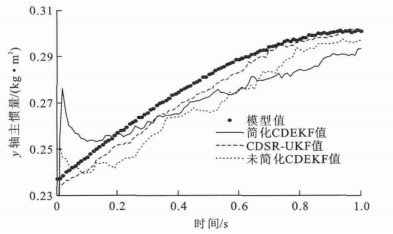
图 7 y轴主惯量的仿真结果比较
Figure 7. Comparison of simulation results about principal moment of inertia relative to axis y

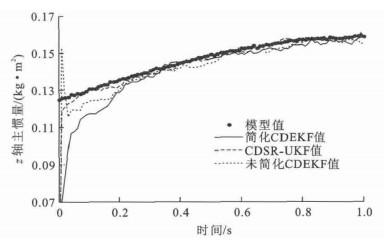
图 8 z轴主惯量的仿真结果比较
Figure 8. Comparison of simulation results about principal moment of inertia relative to axis z

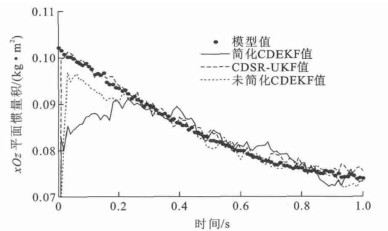
图 9 xOz平面惯量积的仿真结果比较
Figure 9. Comparison of simulation results about product of inertia relative to plane xOz

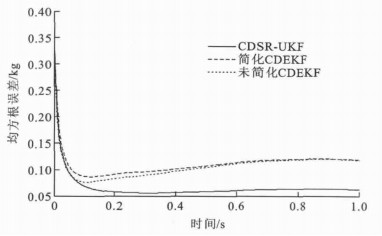
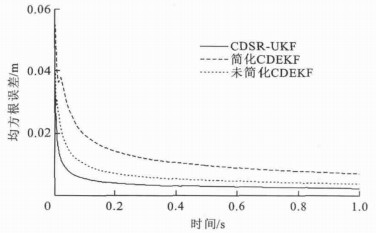
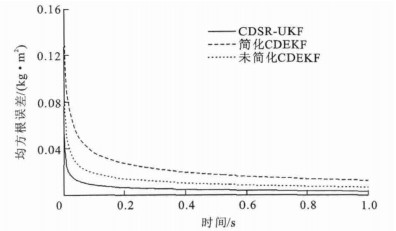
图 11 重心z轴坐标分量的均方根误差比较
Figure 11. Comparison of RMSEs about component of center of gravity along axis z

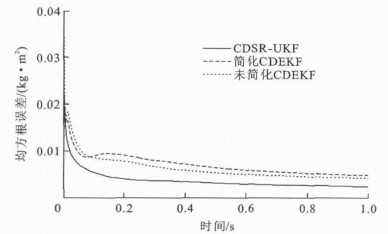
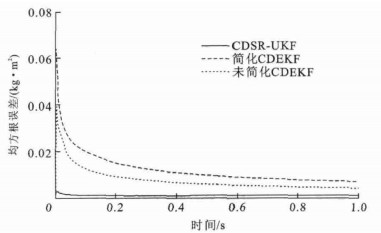
图 12 x轴主惯量的均方根误差比较
Figure 12. Comparison of RMSEs about principal moment of inertia relative to axis x

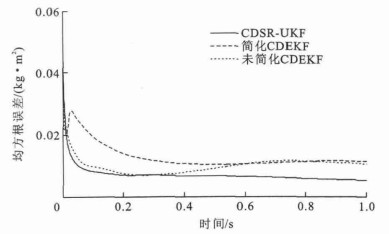
图 13 y轴主惯量的均方根误差比较
Figure 13. Comparison of RMSEs about principal moment of inertia relative to axis y

图 14 z轴主惯量的均方根误差比较
Figure 14. Comparison of RMSEs about principal moment of inertia relative to axis z

图 15 xOz平面惯量积的均方根误差比较
Figure 15. Comparison of RMSEs about product of inertia relative to plane xOz

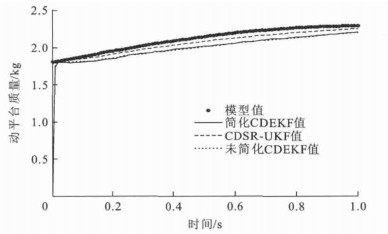
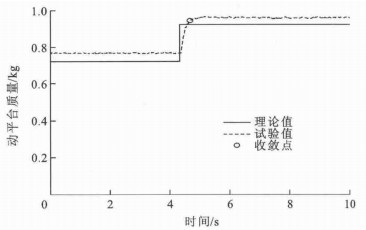
图 17 动平台质量的试验值与理论值比较
Figure 17. Comparison of test value and theoretical value about platform mass

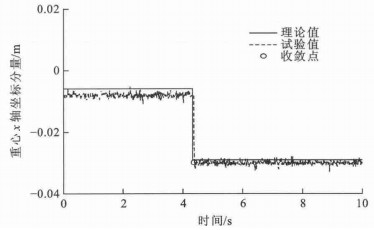
图 18 重心x轴坐标分量的试验值与理论值比较
Figure 18. Comparison of test value and theoretical value about component of center of gravity along axis x

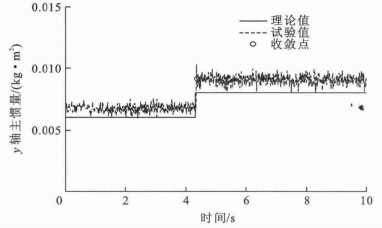
图 19 y轴主惯量的试验值与理论值比较
Figure 19. Comparison of test value and theoretical value about principal moment of inertia relative to axis y

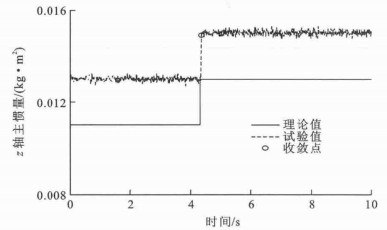
图 20 z轴主惯量的试验值与理论值比较
Figure 20. Comparison of test value and theoretical value about principal moment of inertia relative to axis z

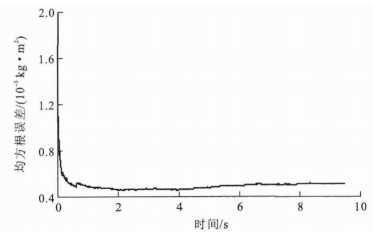
图 22 重心x轴坐标分量的试验结果均方根误差
Figure 22. RMSE of test result about component of center of gravity along axis x

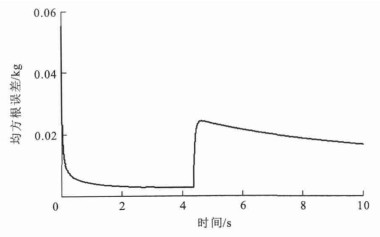
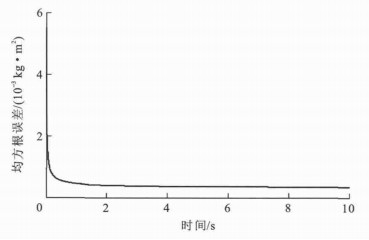
图 23 y轴主惯量的试验结果均方根误差
Figure 23. RMSE of test result about principal moment of inertia relative to axis y

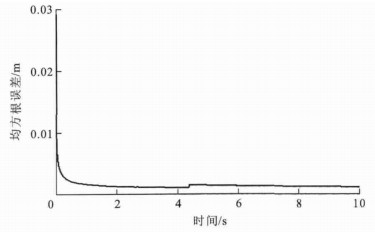
图 24 z轴主惯量的试验结果均方根误差
Figure 24. RMSE of test result about principal moment of inertia relative to axis z

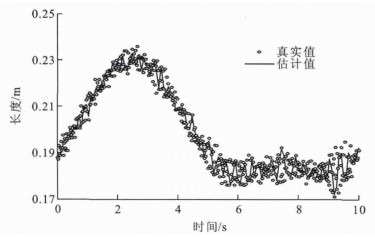
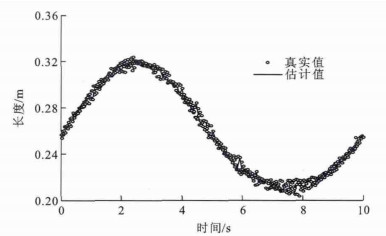
图 25 驱动支链1长度的真实值与估计值
Figure 25. Actual and estimated values of length of driving branch chain 1

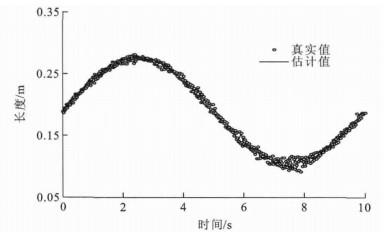
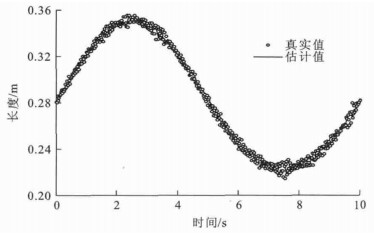
图 26 驱动支链2长度的真实值与估计值
Figure 26. Actual and estimated values of length of driving branch chain 2

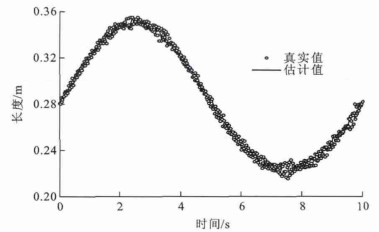
图 27 驱动支链3长度的真实值与估计值
Figure 27. Actual and estimated values of length of driving branch chain 3

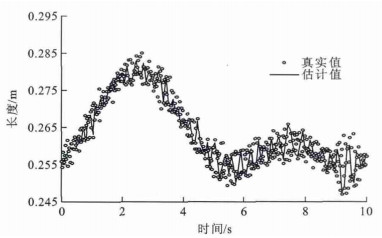
图 28 驱动支链4长度的真实值与估计值
Figure 28. Actual and estimated values of length of driving branch chain 4

图 29 驱动支链5长度的真实值与估计值
Figure 29. Actual and estimated values of length of driving branch chain 5

图 30 驱动支链6长度的真实值与估计值
Figure 30. Actual and estimated values of length of driving branch chain 6
表 1 不同电缆束长度对应的动平台参数
Table 1. Parameters of motion platforms with different cable lengths

表 2 稳定性和精度对比
Table 2. Comparison of stabilities and precisions

表 3 收敛时间对比
Table 3. Comparison of convergence times

表 4 添加质量球前后的动平台参数
Table 4. Parameters of motion platforms with steel ball and without steel ball

表 5 辨识值与理论值的比较
Table 5. Comparison of identification values and theoretical values

-
[1] 李鹏, 顾宏斌, 吴东苏. 基于头部运动要求的六自由度头盔伺服系统尺寸优化设计及其方法[J]. 航空学报, 2011, 32(4): 739-750. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201104019.htmLI Peng, GU Hong-bin, WU Dong-su. Dimensional design and corresponding methodology for helmet mounted display with 6-DOF parallel manipulator based on requirements of head motion[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(4): 739-750. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201104019.htm [2] 李鹏, 顾宏斌, 吴东苏, 等. 头盔伺服系统的主动柔顺控制[J]. 航空学报, 2012, 33(5): 928-939. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201205020.htmLI Peng, GU Hong-bin, WU Dong-su, et al. Active compliance control of helmet mounted display with parallel manipulator[J]. Acta Aeronautica et Astronautica Sinica, 2012, 33(5): 928-939. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201205020.htm [3] WU Dong-su, GU Hong-bin, LI Peng. Comparative study on dynamic identification of parallel motion platform for a novel flight simulator[C]∥IEEE. Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics. New York: IEEE, 2009: 2232-2237. [4] DENG Kun, LI Kai-jun, XIA Qun-sheng. Application of unscented Kalman filter for the state estimation of anti-lock braking system[C]∥IEEE. IEEE International Conference on Vehicular Electronics and Safety, 2006. New York: IEEE, 2006: 130-133. [5] ARAKI N, OKADA M, KONISHI Y. Parameter identification and swing-up control of an Acrobot system[C]∥IEEE. IEEE International Conference on Industrial Technology, 2005. New York: IEEE, 2005: 1040-1045. [6] TORKAMANI S, BUTCHER E A. Optimal estimation of parameters and states in stochastic time-varying systems with time delay[J]. Communications in Nonlinear Science and Numerical Simulation, 2013, 18(8): 2188-2201. doi: 10.1016/j.cnsns.2012.12.017 [7] SÄRKKÄ S. On unscented Kalman filtering for state estimation of continuous-time nonlinear systems[J]. IEEE Transactions on Automatic Control, 2007, 52(9): 1631-1641. doi: 10.1109/TAC.2007.904453 [8] CARLSSON J, NORDHEIM C. A parameter estimation method for continuous time dynamical systems based on the unscented Kalman filter and maximum likelihood[D]. Göteborg: Chalmers University of Technology, 2011. [9] 毕军, 张家玮, 张栋, 等. 电动汽车行驶里程与电池SOC相关性分析与建模[J]. 交通运输系统工程与信息, 2015, 15(1): 49-54. doi: 10.3969/j.issn.1009-6744.2015.01.010BI Jun, ZHANG Jia-wei, ZHANG Dong, et al. A correlation analysis and modeling for battery SOC and driving mileage of electric vehicle[J]. Journal of Transportation Systems Engineering and Information Technology, 2015, 15(1): 49-54. (in Chinese) doi: 10.3969/j.issn.1009-6744.2015.01.010 [10] ZHOU Hao-tian, AI Yong, SHAN Xin, et al. Identification of fine tracking system for free space optical communications[J]. Infrared and Laser Engineering, 2015, 44(2): 736-741. [11] 赵海森, 杜中兰, 刘晓芳, 等. 基于递推最小二乘法与模型参考自适应法的鼠笼式异步电机转子电阻在线辨识方法[J]. 中国电机工程学报, 2014, 34(30): 5386-5394. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC201430017.htmZHAO Hai-sen, DU Zhong-lan, LIU Xiao-fang, et al. An on-line identification method for rotor resistance of squirrel cage induction motors based on recursive least square method and model reference adaptive system[J]. Proceedings of the CSEE, 2014, 34(30): 5386-5394. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC201430017.htm [12] 赵立军, 邓宁宁, 葛柱洪, 等. 四轮驱动车辆路面附着系数实时估计[J]. 哈尔滨工业大学学报, 2014, 46(11): 42-46. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBX201411007.htmZHAO Li-jun, DENG Ning-ning, GE Zhu-hong, et al. Real-time road condition estimation for four-wheel-drive vehicle[J]. Journal of Harbin Institute of Technology, 2014, 46(11): 42-46. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HEBX201411007.htm [13] 李红, 杭影, 韩邦成, 等. DGCMG框架伺服系统摩擦力矩建模及辨识[J]. 振动、测试与诊断, 2014, 34(6): 1001-1007, 1165. doi: 10.3969/j.issn.1004-6801.2014.06.003LI Hong, HANG Ying, HAN Bang-cheng, et al. Analysis of friction torque model of DGCMG gimbal servo system with its identification[J]. Journal of Vibration, Measurement and Diagnosis, 2014, 34(6): 1001-1007, 1165. (in Chinese) doi: 10.3969/j.issn.1004-6801.2014.06.003 [14] 张成新, 高峰, 李艳. 基于实时反馈的机床热误差在线补偿模型[J]. 中国机械工程, 2015, 26(3): 361-365. doi: 10.3969/j.issn.1004-132X.2015.03.013ZHANG Cheng-xin, GAO Feng, LI Yan. On-line compensation model based on real-time feedback thermal errors of machine tools[J]. China Mechanical Engineering, 2015, 26(3): 361-365. (in Chinese) doi: 10.3969/j.issn.1004-132X.2015.03.013 [15] 宋翔, 李旭, 张为公, 等. 汽车主动安全关键参数联合估计方法[J]. 交通运输工程学报, 2014, 14(1): 65-74. doi: 10.3969/j.issn.1671-1637.2014.01.011SONG Xiang, LI Xu, ZHANG Wei-gong, et al. Joint estimation method of key parameters for automotive active safety[J]. Journal of Traffic and Transportation Engineering, 2014, 14(1): 65-74. (in Chinese) doi: 10.3969/j.issn.1671-1637.2014.01.011 [16] 包瑞新, 贾敏, SABBIONI E, 等. 基于扩展Kalman粒子滤波的汽车行驶状态和参数估计[J]. 农业机械学报, 2015, 46(2): 301-306. https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201502044.htmBAO Rui-xin, JIA Min, SABBIONI E, et al. Vehicle state and parameter estimation under driving situation based on extended Kalman particle filter method[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(2): 301-306. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201502044.htm [17] 余舜京, 程艳青, 钱炜祺. 跨声速气动参数在线辨识方法研究[J]. 宇航学报, 2011, 32(6): 1211-1216. doi: 10.3873/j.issn.1000-1328.2011.06.001YU Shun-jing, CHENG Yan-qing, QIAN Wei-qi. Research on transonic aerodynamic parameter online identification[J]. Journal of Astronautics, 2011, 32(6): 1211-1216. (in Chinese) doi: 10.3873/j.issn.1000-1328.2011.06.001 [18] 葛泉波, 李文斌, 孙若愚, 等. 基于EKF的集中式融合估计研究[J]. 自动化学报, 2013, 39(6): 816-825. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201306015.htmGE Quan-bo, LI Wen-bin, SUN Ruo-yu, et al. Centralized fusion algorithm based on EKF for multisensor non-linear systems[J]. Acta Automatica Sinica, 2013, 39(6): 816-825. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201306015.htm [19] GEETHA M, ARUN K P, JOVITHA J. Comparative assessment of a chemical reactor using extended Kalman filter and unscented Kalman filter[J]. Procedia Technology, 2014, 14: 75-84. doi: 10.1016/j.protcy.2014.08.011 [20] 石勇, 韩崇昭. 自适应UKF算法在目标跟踪中的应用[J]. 自动化学报, 2011, 37(6): 755-759. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201106013.htmSHI Yong, HAN Chong-zhao. Adaptive UKF method with applications to target tracking[J]. Acta Automatica Sinica, 2011, 37(6): 755-759. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201106013.htm [21] JULIER S, UHLMANN J, DURRANT-WHYTE H F. A new method for the nonlinear transformation of means and covariances in filters and estimators[J]. IEEE Transactions on Automatic Control, 2000, 45(3): 477-482. doi: 10.1109/9.847726 [22] 赵又群, 林棻. 基于UKF算法的汽车状态估计[J]. 中国机械工程, 2010, 21(5): 615-619, 629. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX201005025.htmZHAO You-qun, LIN Fen. Vehicle state estimation based on unscented Kalman filter algorithm[J]. China Mechanical Engineering, 2010, 21(5): 615-619, 629. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX201005025.htm [23] 徐小来, 雷英杰, 谢文彪. 基于UKF的自组织直觉模糊神经网络[J]. 电子学报, 2010, 38(3): 638-645. https://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201003027.htmXU Xiao-lai, LEI Ying-jie, XIE Wen-biao. Self-organising intuitionistic fuzzy neural networks based on UKF[J]. Acta Electronica Sinica, 2010, 38(3): 638-645. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201003027.htm [24] 丁建明, 林建辉, 王晗, 等. 基于边缘粒子滤波的高速列车性能参数估计方法[J]. 交通运输工程学报, 2014, 14(3): 52-57. doi: 10.3969/j.issn.1671-1637.2014.03.011DING Jian-ming, LIN Jian-hui, WANG Han, et al. Performance parameter estimation method of high-speed train based on Rao-Blackwellised particle filter[J]. Journal of Traffic and Transportation Engineering, 2014, 14(3): 52-57. (in Chinese) doi: 10.3969/j.issn.1671-1637.2014.03.011 [25] 杨静, 郑南宁. 一种基于SR-UKF的GPS/DR组合定位算法[J]. 系统仿真学报, 2009, 21(3): 721-723, 742. https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ200903026.htmYANG Jing, ZHENG Nan-ning. Integrated positioning algorithm for GPS/DR based on SR-UKF[J]. Journal of System Simulation, 2009, 21(3): 721-723, 742. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ200903026.htm [26] 王小旭, 梁彦, 潘泉, 等. 带有色量测噪声的非线性系统Unscented卡尔曼滤波器[J]. 自动化学报, 2012, 38(6): 986-998. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201206011.htmWANG Xiao-xu, LIANG Yan, PAN Quan, et al. Unscented Kalman filter for nonlinear systems with colored measurement noise[J]. Acta Automatica Sinica, 2012, 38(6): 986-998. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201206011.htm -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 501
- HTML全文浏览量: 133
- PDF下载量: 601
- 被引次数: 0
