

-
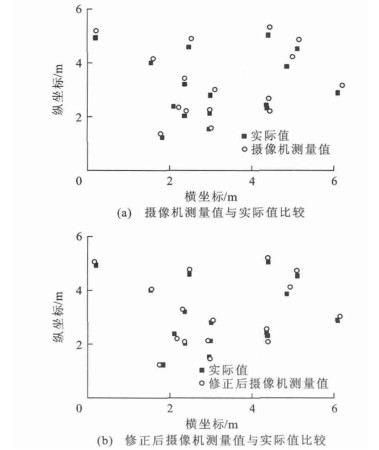
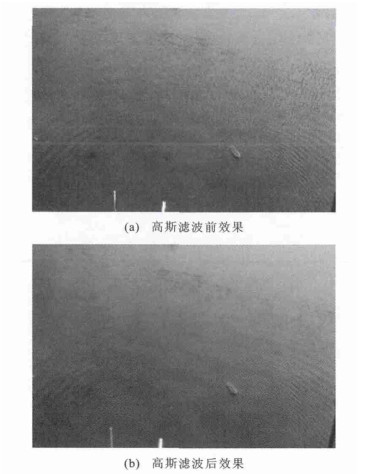
摘要: 针对水面船舶的多目标实时定位, 提出了一种定位和运动参数求解算法, 采用固定位置和视角的单目摄像机采集船舶图像, 对采集的图像进行高斯滤波和图像畸变校正, 提出了基于船舶颜色、尺寸与运动学特征同时识别多个船舶目标(每个船舶目标独立识别)的方法, 构建了图像坐标与真实环境坐标的转换模型与实时航速、航向和轨迹的计算模型, 在水池环境下搭建了实时定位系统, 开发了实时定位程序, 并验证了定位方法的定位精度和轨迹跟踪性能。验证结果表明: 在存在外界干扰的情况下, 定位算法能实现对2艘船舶的精确识别; 修正前坐标点横、纵坐标平均误差分别为0.058、0.209m, 修正后分别为0.038、0.124m;摄像机定位数据更新频率为8 Hz, 满足船舶控制需要; 算法能实现对船舶位置、航速和航向的准确、实时计算, 轨迹平滑且未出现异常点。Abstract: Aiming at the multi-target real-time locating of surface ship, an algorithm for real-time locating and motion parameters calculating of ship was proposed.The proposed algorithm was realized by processing the images captured by monocular camera with fixed position and perspective. The captured images were preprocessed with Gaussian filter and distortion correction, and a multi-target recognition method was proposed based on ship color features, size characteristics, and kinematic characteristics(every target could be identified individually).A transformation model between image coordinate system and real coordinate system, and a computing model for ship speed, course and trajectory calculation were built.A real locating system was built in experimental pool, a real-time locating program was developed, and the locating precision and trajectory tracking performance were verified.Verification result indicates that in the circumstance with disturbances, the precise recognition of two ships can be realized by using proposed locating algorithm.The average locating errors in lateral and longitudinalorientation are 0.058 m and 0.209 mrespectively before amendment, 0.038 m and 0.124 m respectively after amendment.The update frequency of camera locating data is 8 Hz, which can meet the control requirements.The real-time position, speed and course of ship can be correctly calculated, and the trajectory is smooth without any abnormal location point.
-
Key words:
- ship locating /
- monocular vision /
- multi-target /
- color feature /
- dostortion correction /
- target extraction
-

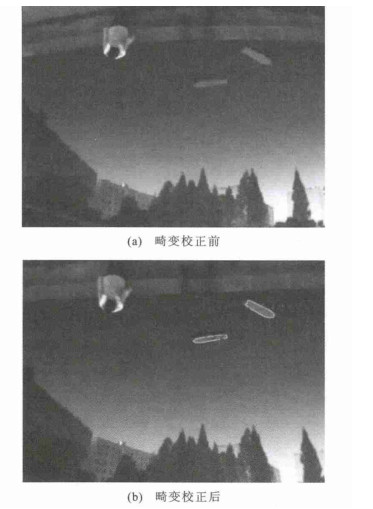
图 3 摄像机镜头畸变校正前后效果对比
Figure 3. Effect comparison before and after distortion correction of camera lens

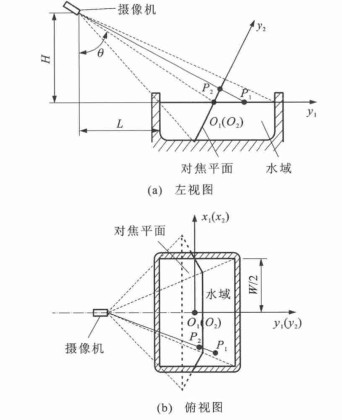
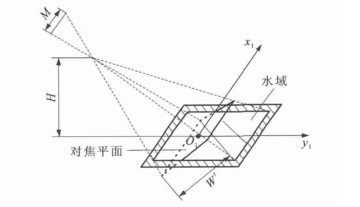
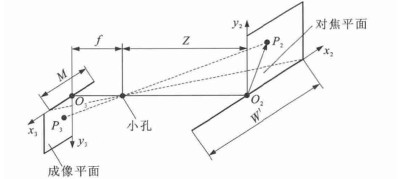
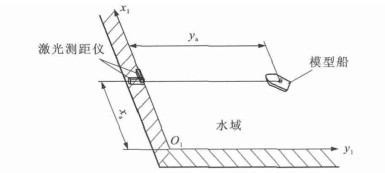
图 8 对焦平面与世界坐标系转换关系
Figure 8. Transform relationship between focal plane and world coordinate system
表 1 测量结果
Table 1. Measuring result

-
[1] CACCIA M, BIBULI M, BONO R, et al. Basic navigation, guidance and control of an unmanned surface vehicle[J]. Autonomous Robots, 2008, 25(4): 349-365. doi: 10.1007/s10514-008-9100-0 [2] 周娜. 基于单目视觉的摄像机定位技术研究[D]. 南京: 南京航空航天大学, 2007.ZHOU Na. Research on camera location based on monocular vision[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2007. (in Chinese) [3] 刘江, 蔡伯根, 王云鹏. 基于GNSS/ DSRC融合的协同车辆定位方法[J]. 交通运输工程学报, 2014, 14(4): 116-126. http://transport.chd.edu.cn/article/id/201404014LIU Jiang, CAI Bai-gen, WANG Yun-peng. Cooperative vehicle positioning method based on GNSS/DSRC fusion[J]. Journal of Traffic and Transportation Engineering, 2014, 14(4): 116-126. (in Chinese) http://transport.chd.edu.cn/article/id/201404014 [4] 李明月. 高精度捷联式惯性导航系统校准与补偿方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2012.LI Ming-yue. The research of calibration and compensation methods for high precision strapdown inertial navigation system[D]. Harbin: Harbin Engineering University, 2012. (in Chinese) [5] 孟浩, 程康. 基于SIFT特征点的双目视觉定位[J]. 哈尔滨工程大学学报, 2009, 30(6): 649-652, 675. doi: 10.3969/j.issn.1006-7043.2009.06.011MENG Hao, CHENG Kang. Object location technique for binocular stereo vision based on scale invariant feature transform feature points[J]. Journal of Harbin Engineering University, 2009, 30(6): 649-652, 675. (in Chinese) doi: 10.3969/j.issn.1006-7043.2009.06.011 [6] 曹凤萍, 王荣本, 张亮修. 基于双目立体视觉的月球车三维定位算法[J]. 交通信息与安全, 2012, 30(4): 28-33. doi: 10.3963/j.issn.1674-4861.2012.04.007CAO Feng-ping, WANG Rong-ben, ZHANG Liang-xiu. A three-dimensional localization algorithm of lunar rover based on binocular vision[J]. Journal of Transport Information and Safety, 2012, 30(4): 28-33. (in Chinese) doi: 10.3963/j.issn.1674-4861.2012.04.007 [7] 李荣明, 芦利斌, 金国栋. 单目视觉定位方法研究综述[J]. 现代计算机, 2011, 28(11): 9-12. doi: 10.3969/j.issn.1007-1423-B.2011.11.003LI Rong-ming, LU Li-bin, JIN Guo-dong. Research overview of location method for monocular vision[J]. Modern Computer, 2011, 28(11): 9-12. (in Chinese) doi: 10.3969/j.issn.1007-1423-B.2011.11.003 [8] 刘洪伟. 基于单目视觉的移动机器人目标识别与定位[D]. 济南: 山东大学, 2011.LIU Hong-wei. Mobile robot object recognition and localization based on monocular vision[D]. Jinan: Shandong University, 2011. (in Chinese) [9] 张治国. 基于单目视觉的定位系统研究[D]. 武汉: 华中科技大学, 2009.ZHANG Zhi-guo. Research on locating system based on monocular vision[D]. Wuhan: Huazhong University of Science and Technology, 2009. (in Chinese) [10] HUNTSBERGER T, AGHAZARIAN H, HOWARD A, et al. Stereo vision-based navigation for autonomous surface vessels[J]. Journal of Field Robotics, 2011, 28(1): 3-18. doi: 10.1002/rob.20380 [11] MA Yue, HU Ying, BI Feng-long. Tracking and position study for unmanned semi-submersible vessel based on stereo vision[C]∥IEEE. 4th International Conference on Digital Manufacturing and Automation. New York: IEEE, 2013: 1618-1621. [12] ASHRAFIUON H, MUSKE K R, MCNINCH L C, et al. Sliding-mode tracking control of surface vessels[J]. IEEE Transactions on Industrial Electronics, 2008, 55(11): 4004-4012. doi: 10.1109/TIE.2008.2005933 [13] 王健, 王孝通, 徐晓刚. 基于单目机器视觉的船舶测距定位原理研究[J]. 中国航海, 2005, 28(3): 8-10, 14. doi: 10.3969/j.issn.1000-4653.2005.03.002WANG Jian, WANG Xiao-tong, XU Xiao-gang. Study of ship locating principle by measuring distance based on the monocular camera machine vision[J]. Navigation of China, 2005, 28(3): 8-10, 14. (in Chinese) doi: 10.3969/j.issn.1000-4653.2005.03.002 [14] 王强锋. 利用单目视觉测量技术研究船桥撞击运动[D]. 宁波: 宁波大学, 2012.WANG Qiang-feng. Studying on the ship movement during ship-bridge collision with monocular vision measuring[D]. Ningbo: Ningbo University, 2012. (in Chinese) [15] LU Jian-guo, CAI A, LI Li-li. A detection-aided multi-target tracking algorithm[C]∥IEEE. 2010 International Conference on Machine Vision and Human-Machine Interface. New York: IEEE, 2010: 580-583. [16] HEATH K, GUIBAS L. Multi-person tracking from sparse 3D trajectories in a camera sensor network[C]∥IEEE. 2nd ACM/IEEE International Conference on Distributed Smart Cameras. New York: IEEE, 2008: 1-9. [17] 梁敏. 基于粒子滤波的多目标跟踪算法研究[D]. 西安: 西安电子科技大学, 2010.LIANG Min. Study of multi-target tracking algorithm based on particle filter[D]. Xi'an: Xidian University, 2010. (in Chinese) [18] 王文远. 基于图像信噪比选择优化高斯滤波尺度[J]. 电子与信息学报, 2009, 31(10): 2483-2487. https://www.cnki.com.cn/Article/CJFDTOTAL-DZYX200910039.htmWANG Wen-yuan. Selecting the optimal Gaussian filtering scale via the SNR of image[J]. Journal of Electronics and Information Technology, 2009, 31(10): 2483-2487. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DZYX200910039.htm [19] 熊显名, 任娟娟. 黑白棋盘格中的角点提取算法的研究[J]. 微型机与应用, 2014, 33(9): 66-69. doi: 10.3969/j.issn.1674-7720.2014.09.021XIONG Xian-ming, REN Juan-juan. Research of corner detection algorithm in the black and white checkerboard[J]. Microcomputer and Its Applications, 2014, 33(9): 66-69. (in Chinese) doi: 10.3969/j.issn.1674-7720.2014.09.021 [20] TIAN L F, SLAUGHTER D C. Environmentally adaptive segmentation algorithm for outdoor image segmentation[J]. Computers and Electronics in Agriculture, 1998, 21(3): 153-168. doi: 10.1016/S0168-1699(98)00037-4 [21] 刘娅静, 杨帆, 浦昭邦. 基于颜色特征的杂草图像分割技术研究[J]. 微计算机信息, 2007, 23(18): 269-271. doi: 10.3969/j.issn.1008-0570.2007.18.106LIU Ya-jing, YANG Fan, PU Zhao-bang. Research on segmentation of field weed image based on color feature[J]. Microcomputer Information, 2007, 23(18): 269-271. (in Chinese) doi: 10.3969/j.issn.1008-0570.2007.18.106 [22] 张晓娜, 何仁, 陈士安, 等. 基于主动学习AdaBoost算法与颜色特征的车牌定位[J]. 交通运输工程学报, 2013, 13(1): 121-126. http://transport.chd.edu.cn/article/id/201301018ZHANG Xiao-na, HE Ren, CHEN Shi-an, et al. Vehicle license plate location using active learning AdaBoost algorithm and color feature[J]. Journal of Traffic and Transportation Engineering, 2013, 13(1): 121-126. (in Chinese) http://transport.chd.edu.cn/article/id/201301018 [23] 张文娟. 桥区船舶航行风险预警系统研究[D]. 武汉: 武汉理工大学, 2013.ZHANG Wen-juan. Early warning system for ship navigation risk in bridge waterways[D]. Wuhan: Wuhan University of Technology, 2013. (in Chinese) -

 下载:
下载:


 点击查看大图
点击查看大图
图(17) / 表(1)
计量
- 文章访问数: 671
- HTML全文浏览量: 157
- PDF下载量: 1377
- 被引次数: 0
