

Vehicle detection and tracking algorithm based on monocular and binocular vision fusion
-
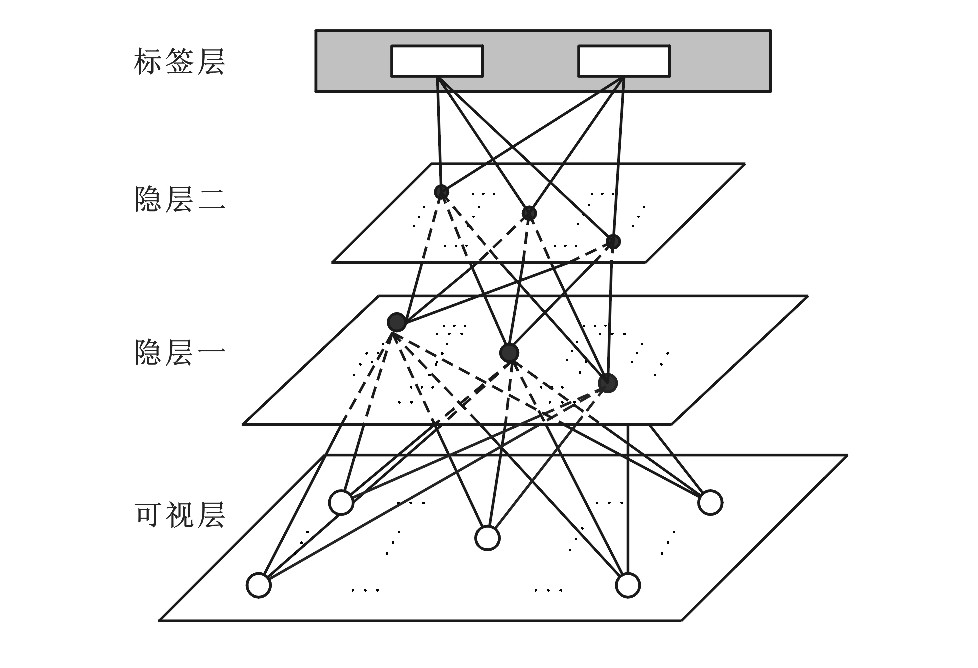
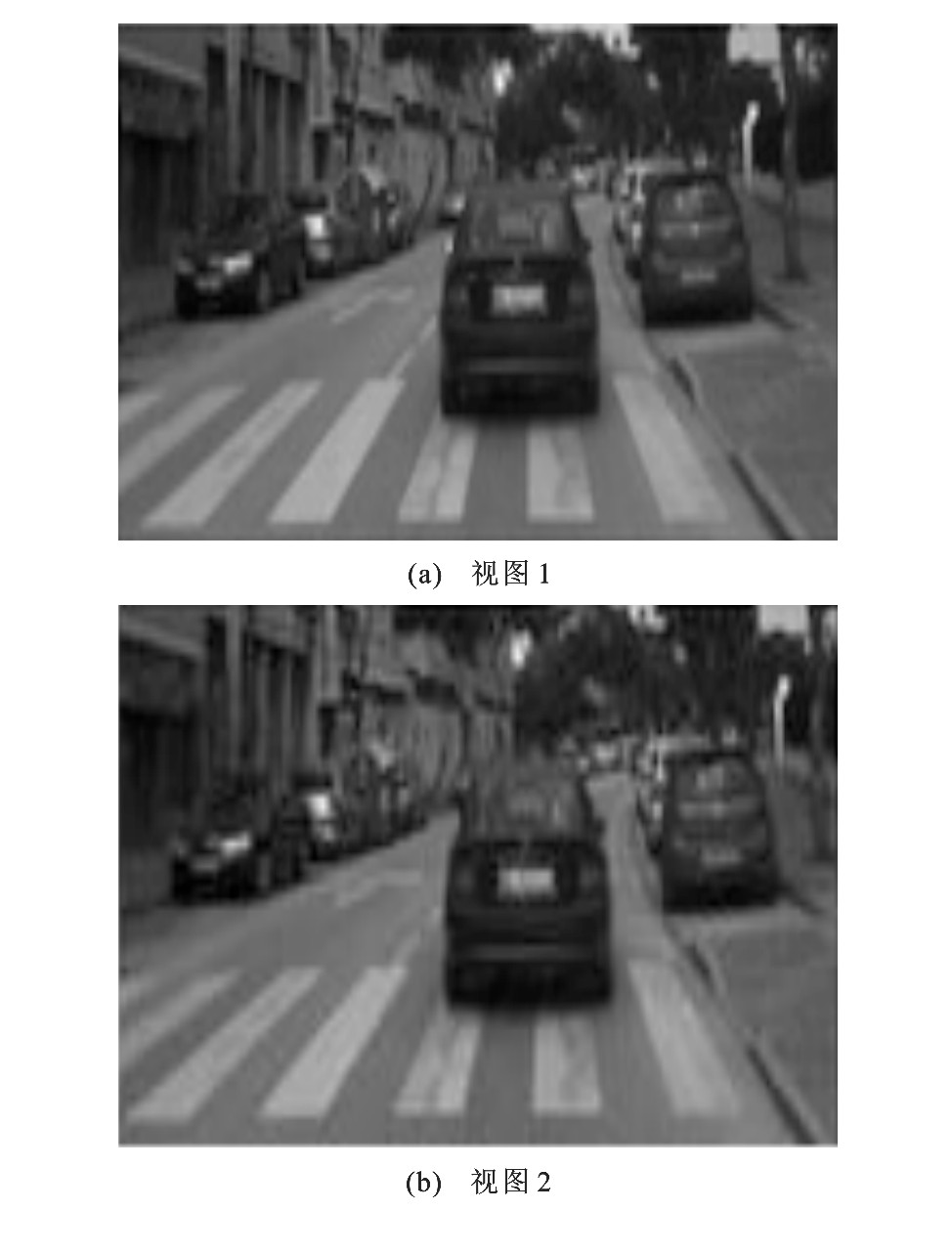
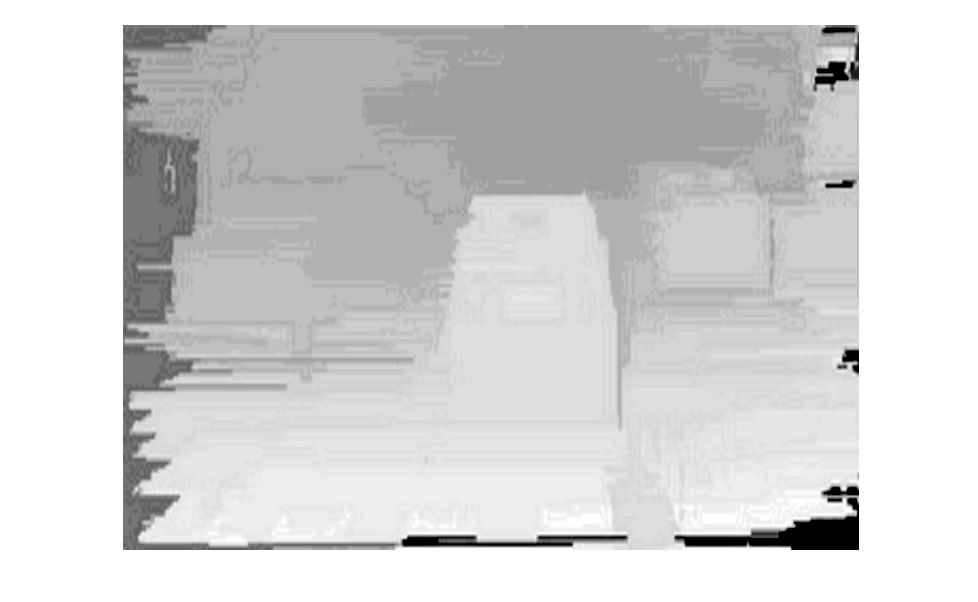
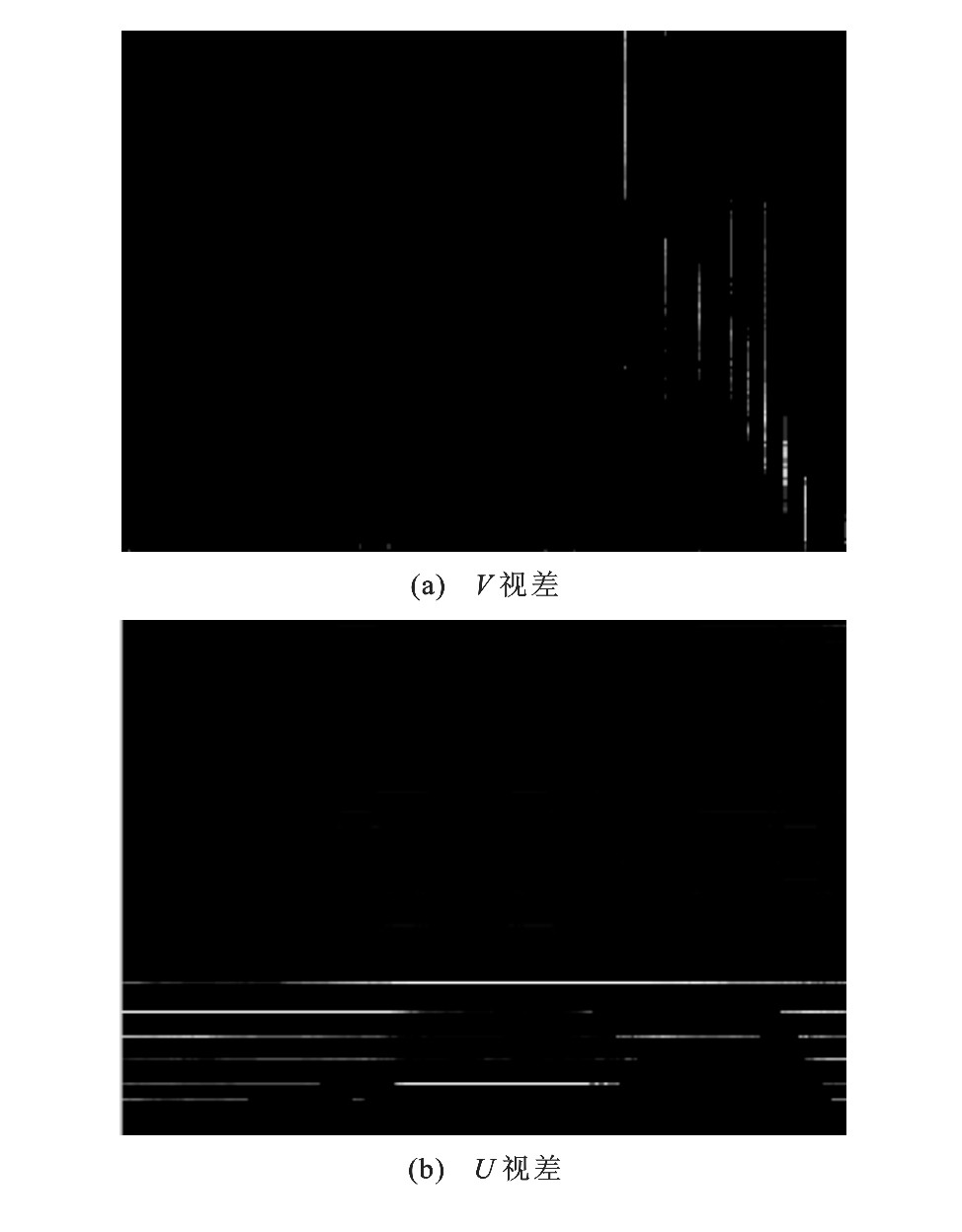
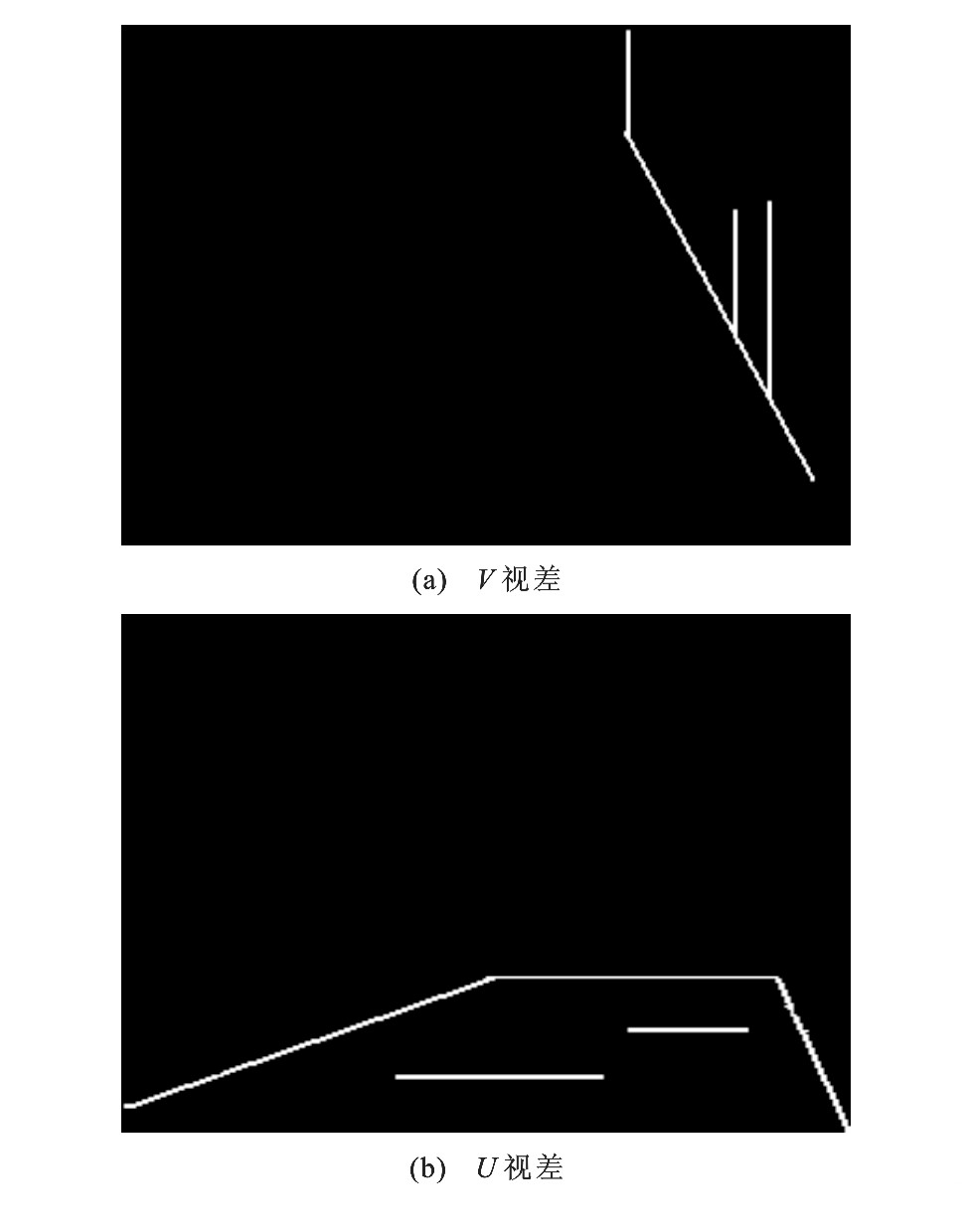
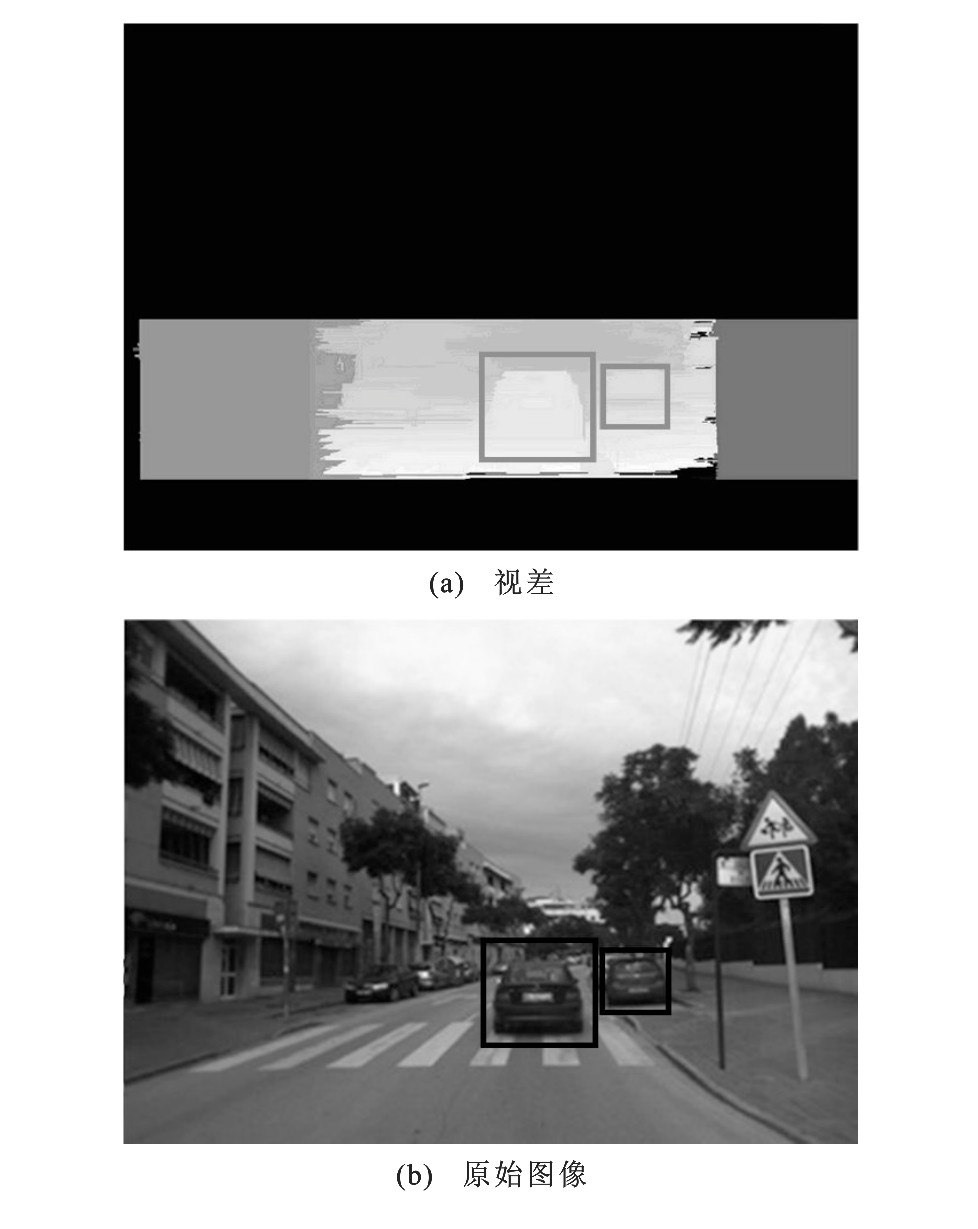
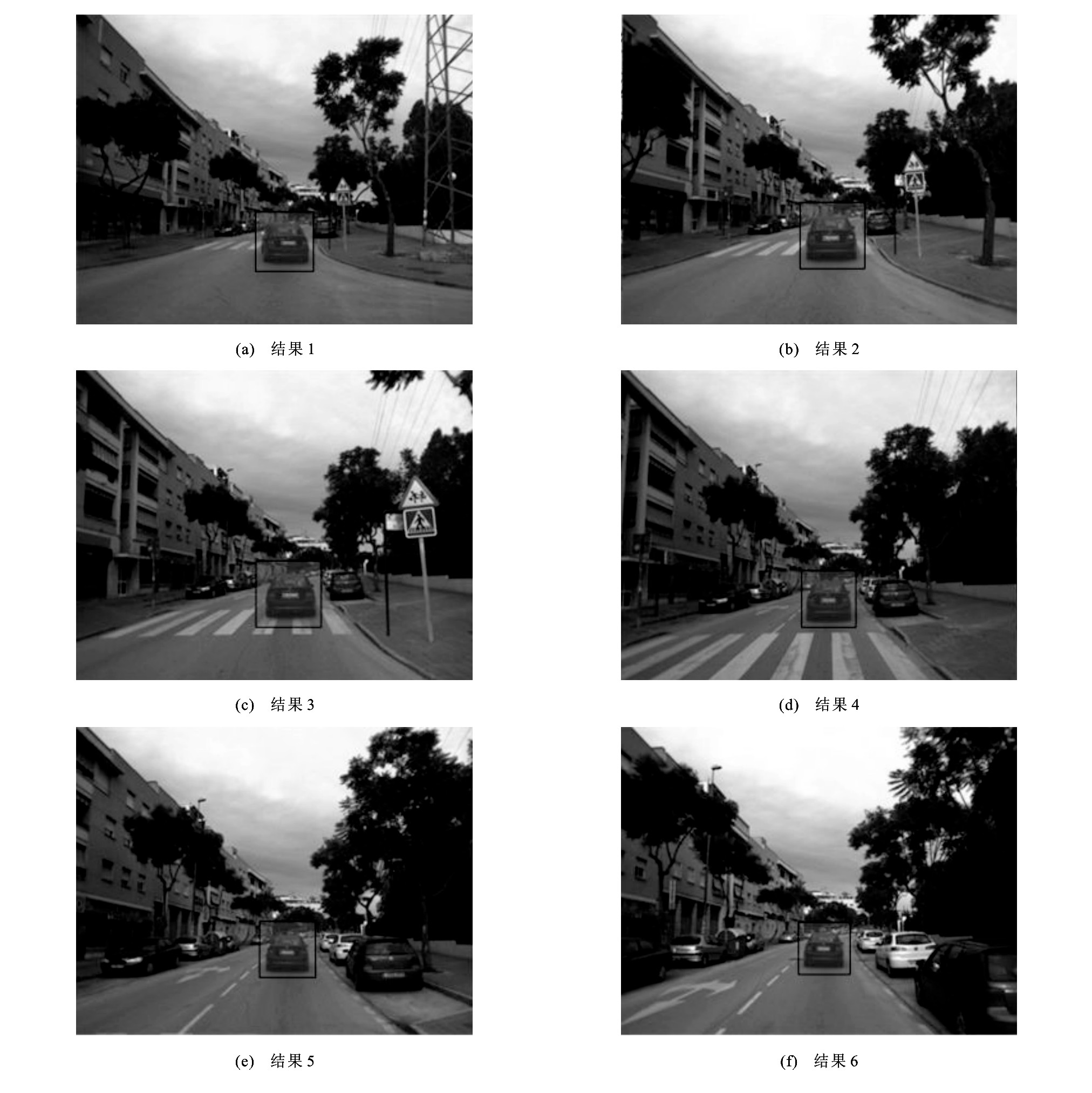
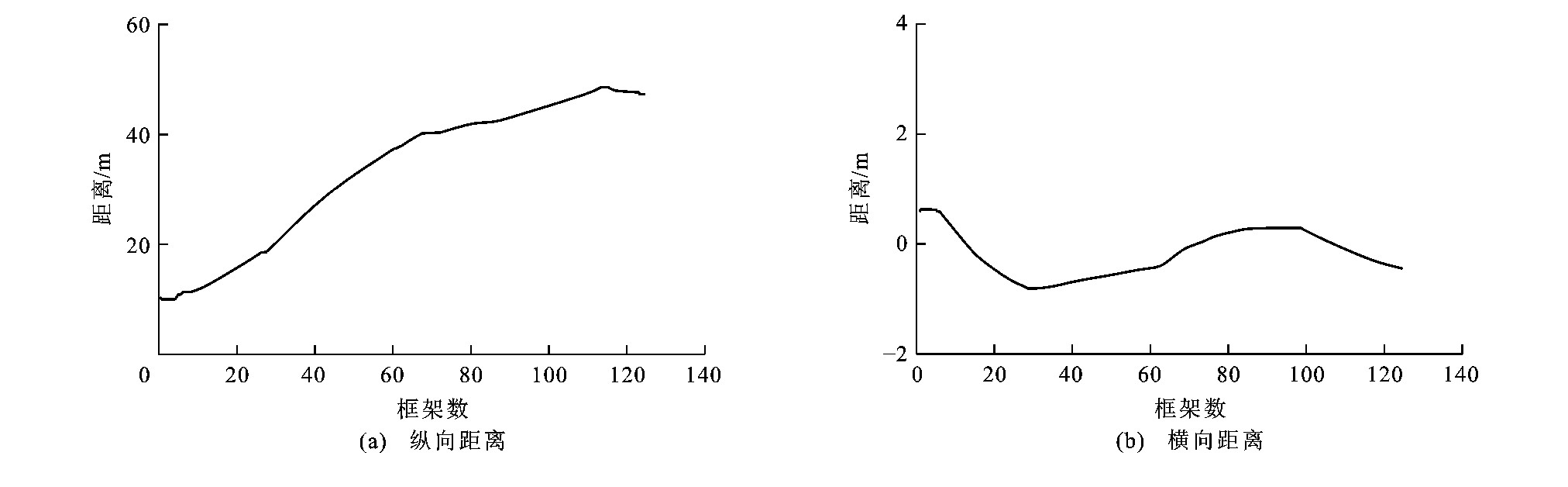
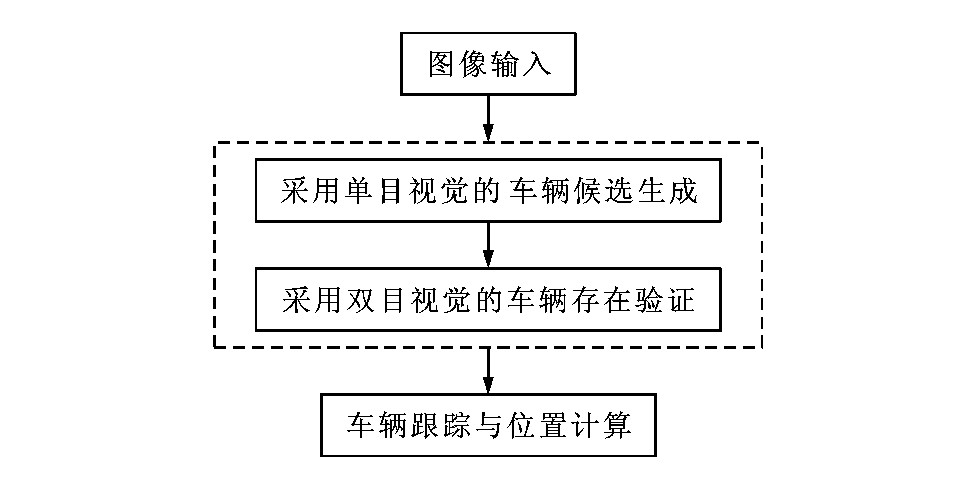
摘要: 提出了一种基于单双目视觉融合的车辆检测与基于Kalman滤波的车辆跟踪算法, 设计了一种基于二维深度置信网络的车辆检测器。在道路图像中利用单目视觉生成车辆可能存在的区域, 构成双目视觉处理的车辆候选集合。在车辆可能存在的区域内利用双目视觉进行误检去除, 并获得车辆的位置信息。在二维图像坐标系和三维世界坐标系内, 利用Kalman滤波器对检测到的车辆进行跟踪。试验结果表明: 算法的检测率为99.0%, 误检率为1.3×10-4%, 检测时间为57ms, 检测率高, 误检率低, 检测时间短; 与单双目视觉弱融合算法、单目视觉算法和双目视觉算法相比, 本文车辆检测与跟踪算法兼具双目视觉算法检测率高和单目视觉算法检测时间短的优点。Abstract: The monocular and binocular vision fusion based vehicle detection and Kalman filter based vehicle tracking algorithm was proposed.The 2D deep belief network based vehicle detector was designed.In road images, the monocular vision was used to generate probably existing area of vehicle that composes vehicle candidate set processed by the binocular vision.The binocular vision was used to further eliminate error detection and obtain vehicle position information.The Kalman filter was used to track detected vehicles in 2D image coordinate system and 3D world coordinate system.Test result shows that the detection rate of the algorithm is 99.0%, the error detection rate is 1.3×10-4%, and the detection time is 57 ms.So the detection rate is high, the error detection rate is low, and the detection time is short.Compared to the monocular and binocular vision weak fusion algorithm, the monocular vision algorithm and the binocular vision algorithm, the proposed vehicle detection and tracking algorithm has both the advantage of binocular vision with high detection rate and the advantage of monocular vision with short detection time.
-
表 1 算法性能比较
Table 1. Performance comparison of algorithms

-
[1] TEOH S S, BRÄUNL T. Symmetry-based monocular vehicle detection system[J]. Machine Vision and Applications, 2012, 23(5): 831-842. doi: 10.1007/s00138-011-0355-7 [2] SIVARAMAN S, TRIVEDI M M. Integrated lane and vehicle detection, localization, and tracking: a synergistic approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(2): 906-917. doi: 10.1109/TITS.2013.2246835 [3] 何力, 曲仕茹. 基于PLS-VIP特征降维的车辆检测[J]. 中国公路学报, 2014, 27(4): 98-105. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201404016.htmHE Li, QU Shi-ru. Dimensionality reduction based on PLSVIP for vehicle detection[J]. China Journal of Highway and Transport, 2014, 27(4): 98-105. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201404016.htm [4] CARAFFI C, VOJÍŘT, TREFNY'J, et al. A system for real-time detection and tracking of vehicles from a single carmounted camera[C]∥IEEE. 2012 15th International IEEE Conference on Intelligent Transportation Systems. New York: IEEE, 2012: 975-982. [5] ZHANG Zhao-xiang, TAN Tie-niu, HUANG Kai-qi, et al. Three-dimensional deformable-model-based localization and recognition of road vehicles[J]. IEEE Transactions on Image Processing, 2012, 21(1): 1-13. doi: 10.1109/TIP.2011.2160954 [6] MILANÉS V, LLORCA D F, VILLAGRÁJ, et al. Intelligent automatic overtaking system using vision for vehicle detection[J]. Expert Systems with Applications, 2012, 39(3): 3362-3373. doi: 10.1016/j.eswa.2011.09.024 [7] SIVARAMAN S, TRIVEDI M M. Active learning for onroad vehicle detection: a comparative study[J]. Machine Vision and Applications, 2014, 25(3): 599-611. doi: 10.1007/s00138-011-0388-y [8] SEO D, PARK H, JO K, et al. Omnidirectional stereo vision based vehicle detection and distance measurement for driver assistance system[C]∥IEEE. 39th Annual Conference of the IEEE Industrial Electronics Society. New York: IEEE, 2013: 5507-5511. [9] NGUYEN T N, MICHAELIS B, AL-HAMADI A, et al. Stereo-camera-based urban environment perception using occupancy grid and object tracking[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(1): 154-165. doi: 10.1109/TITS.2011.2165705 [10] BARROIS B, HRISTOVA S, WÁHLER C, et al. 3Dpose estimation of vehicles using a stereo camera[C]∥IEEE. 2009IEEE Intelligent Vehicles Symposium. New York: IEEE, 2009: 267-272. [11] TOULMINET G, BERTOZZI M, MOUSSET S, et al. Vehicle detection by means of stereo vision-based obstacles features extraction and monocular pattern analysis[J]. IEEE Transactions on Image Processing, 2006, 15(8): 2364-2375. doi: 10.1109/TIP.2006.875174 [12] SIVARAMAN S, TRIVEDI M M. Combining monocular and stereo-vision for real-time vehicle ranging and tracking on multilane highways[C]∥IEEE. 14th International IEEE Conference on Intelligent Transportation Systems. New York: IEEE, 2011: 1249-1254. [13] ENZWEILER M, EIGENSTETTER A, SCHIELE B, et al. Multi-cue pedestrian classification with partial occlusion handling[C]∥IEEE. 2010IEEE Computer Society Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2010: 990-997. [14] KLAUS A, SORMANN M, KARNER K. Segment-based stereo matching using belief propagation and a self-adapting dissimilarity measure[C]∥IEEE. 18th International Conference on Pattern Recognition. New York: IEEE, 2006: 15-18. [15] BLANCO J L, MORENO F A, GONZALEZ J. A collection of outdoor robotic datasets with centimeter-accuracy ground truth[J]. Autonomous Robots, 2009, 27(4): 327-351. doi: 10.1007/s10514-009-9138-7 [16] WANG Hai, CAI Ying-feng, CHEN Long. A vehicle detection algorithm based on deep belief network[J]. The Scientific World Journal, 2014, 2014: 1-7. [17] BAK A, BOUCHAFA S, AUBERT D. Detection of independently moving objects through stereo vision and ego-motion extraction[C]∥IEEE. 2010 IEEE Intelligent Vehicles Symposium. New York: IEEE, 2010: 863-870. -

 下载:
下载:


 点击查看大图
点击查看大图
图(12) / 表(1)
计量
- 文章访问数: 569
- HTML全文浏览量: 95
- PDF下载量: 1252
- 被引次数: 0
