

Comparison of relative navigation methods for large vessel formation
-
摘要: 基于导航卫星伪距双差建立了相对导航模型, 设计了基于伪距单差的最小二乘算法、基于伪距双差的最小二乘算法、基于伪距单差的EKF算法与基于伪距双差的EKF算法, 并通过试验进行对比分析。研究结果表明: 基于伪距双差的相对导航模型可以消除电离层、对流层、多路径误差、卫星钟差与接收机钟差; 与最小二乘算法相比, EKF算法能够显著提高相对导航信息的解算精度; EKF算法下伪距双差的解算精度比伪距单差提高约10%;在几何精度因子最小的原则下, 卫星个数增多, 距离解算精度提高; 基线为2m时, 基于伪距双差的EKF算法所得距离解算精度可达到0.10m以内, 方位角解算精度可达到4.0°, 因此, EFK算法的精度和频率可满足大型舰船编队保持准动态的相对导航需求。Abstract: A relative navigation model based on the pseudo-range double-difference of navigation satellite was built.Pseudo-range single difference based least square algorithm, pseudo-range double-difference based least square algorithm, pseudo-range single difference based EKF algorithm and pseudo-range double-difference based EKF algorithm were designed and were compared by tests.Analysis result shows that pseudo-range double-difference based relative navigation model can eliminate ionosphere, troposphere, multi-path, satellite clock error and receive clock error.EKF algorithm can significantly improve the resolution accuracy of relative navigation information compared with least square algorithm. Under EKF algorithm, the resolution accuracy of pseudo-range double-difference is 10% better than pseudo-range single difference.Under the minimum GDOP value principle, when the number of satellites increases, the distance resolution accuracy becomes better. When baseline length is 2 m, the distance resolution accuracy of pseudo-range double-difference based EKF algorithm can reach within 0.10 m, azimuth resolution accuracy can reach 4.0°, so the test accuracy and frequency in this paper can satisfy the relative navigation demand of keeping quasi dynamic for large vessel formation. 3 tabs, 27 figs, 20 refs.
-

图 1 基于伪距单差的相对导航模型
Figure 1. Relative navigation model based on pseudo-range single difference

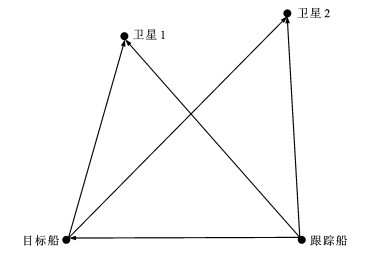
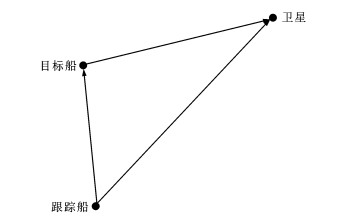
图 2 基于伪距双差的相对导航模型
Figure 2. Relative navigation model based on pseudo-range double-difference

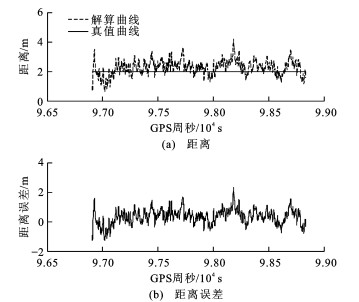
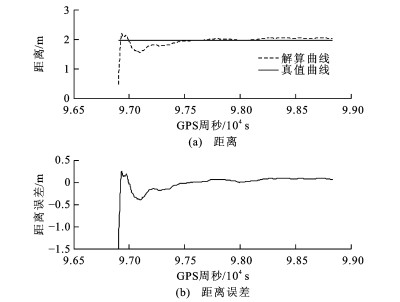
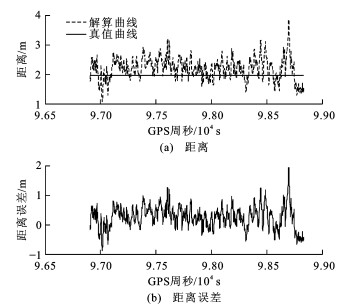
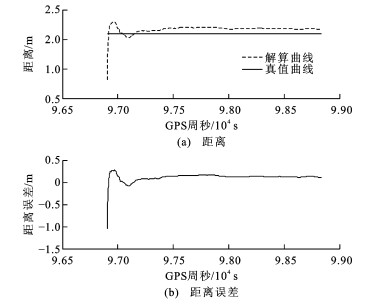
图 4 算法1基于4颗卫星观测数据的距离曲线
Figure 4. Distance curves of algorithm 1 based on observation data of four satellites

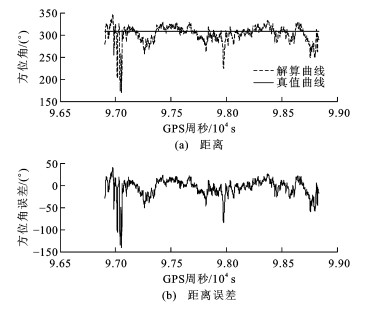
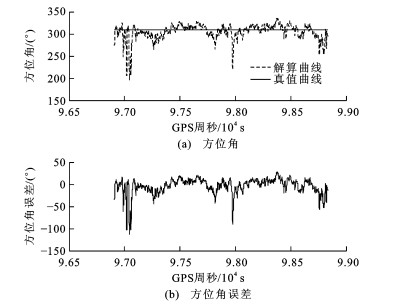
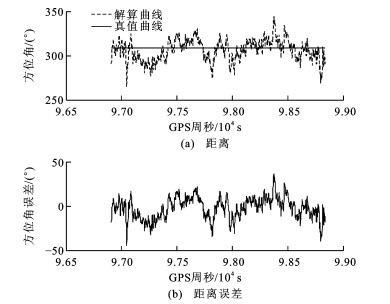
图 5 算法1基于4颗卫星观测数据的方位角曲线
Figure 5. Azimuth curves of algorithm 1 based on observation data of four satellites

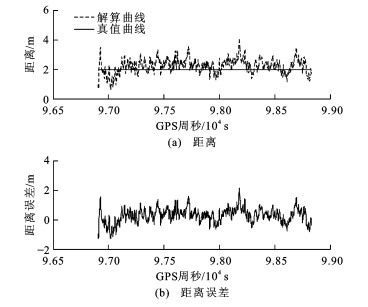
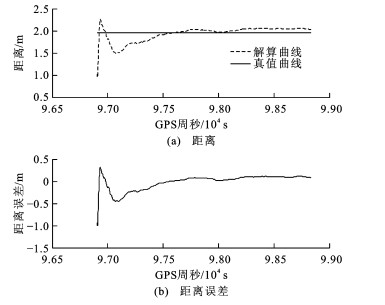
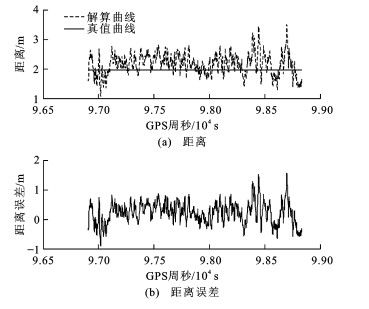
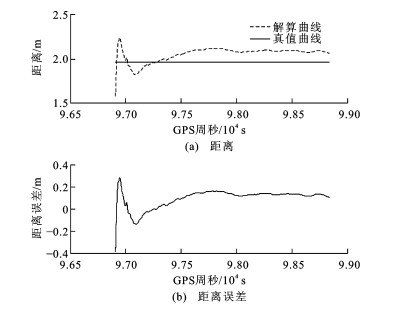
图 6 算法2基于4颗卫星观测数据的距离曲线
Figure 6. Distance curves of algorithm 2 based on observation data of four satellites

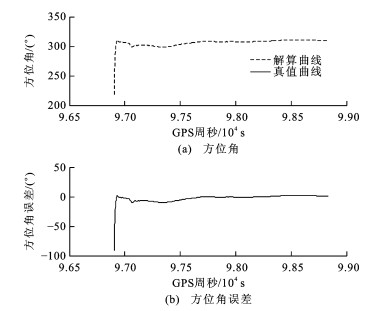
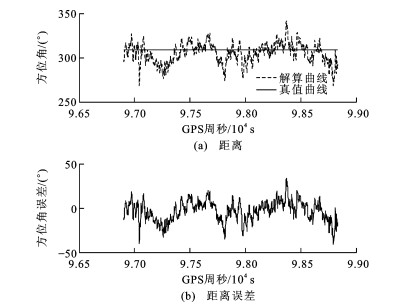
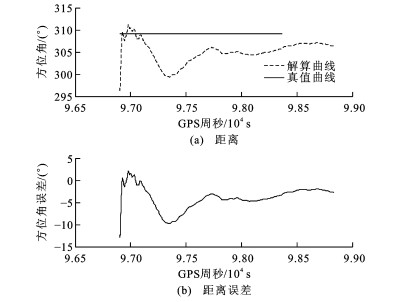
图 7 算法2基于4颗卫星观测数据的方位角曲线
Figure 7. Azimuth curves of algorithm 2 based on observation data of four satellites

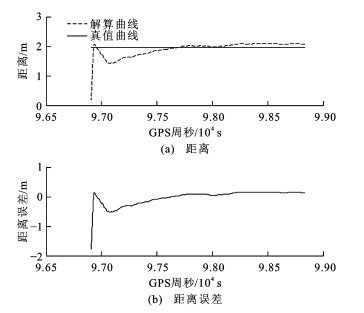
图 8 算法3基于4颗卫星观测数据的距离曲线
Figure 8. Distance curves of algorithm 3 based on observation data of four satellites

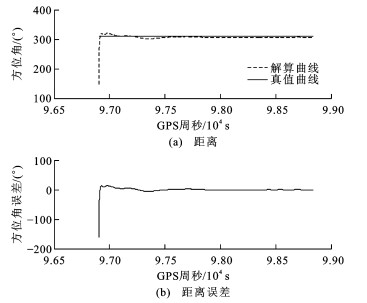
图 9 算法3基于4颗卫星观测数据的方位角曲线
Figure 9. Azimuth curves of algorithm 3 based on observation data of four satellites

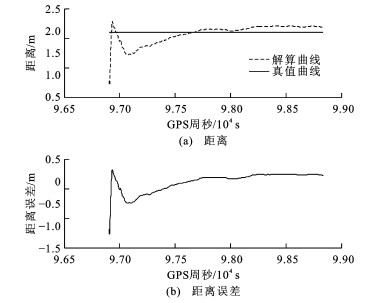
图 10 算法4基于4颗卫星观测数据的距离曲线
Figure 10. Distance curves of algorithm 4 based on observation data of four satellites

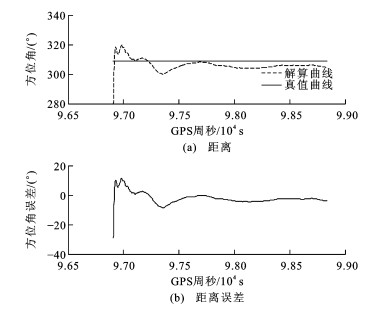
图 11 算法4基于4颗卫星观测数据的方位角曲线
Figure 11. Azimuth curves of algorithm 4 based on observation data of four satellites

图 12 算法1基于6颗卫星观测数据的距离曲线
Figure 12. Distance curves of algorithm l based on observation data of six satellites

图 13 算法1基于6颗卫星观测数据的方位角曲线
Figure 13. Azimuth curves of algorithm 1 based on observation data of six satellites

图 14 算法2基于6颗卫星观测数据的距离曲线
Figure 14. Distance curves of algorithm 2 based on observation data of six satellites

图 15 算法2基于6颗卫星观测数据的方位角曲线
Figure 15. Azimuth curves of algorithm 2 based on observation data of six satellites

图 16 算法3基于6颗卫星观测数据的距离曲线
Figure 16. Distance curves of algorithm 3 based on observation data of six satellites

图 17 算法3基于6颗卫星观测数据的方位角曲线
Figure 17. Azimuth curves of algorithm 3 based on observation data of six satellites

图 18 算法4基于6颗卫星观测数据的距离曲线
Figure 18. Distance curves of algorithm 4 based on observation data of six satellites

图 19 算法4基于6颗卫星观测数据的方位角曲线
Figure 19. Azimuth curves of algorithm 4 based on observation data of six satellites

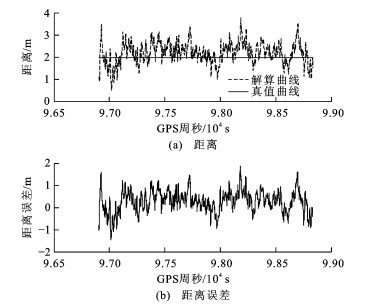
图 20 算法1基于8颗卫星观测数据的距离曲线
Figure 20. Distance curves of algorithm 1 based on observation data of eight satellites

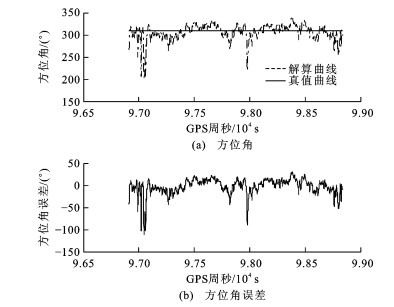
图 21 算法1基于8颗卫星观测数据的方位角曲线
Figure 21. Azimuth curves of algorithm 1 based on observation data of eight satellites

图 22 算法2基于8颗卫星观测数据的距离曲线
Figure 22. Distance curves of algorithm 2 based on observation data of eight satellites

图 23 算法2基于8颗卫星观测数据的方位角曲线
Figure 23. Azimuth curves of algorithm 2 based on observation data of eight satellites

图 24 算法3基于8颗卫星观测数据的距离曲线
Figure 24. Distance curves of algorithm 3 based on observation data of eight satellites

图 25 算法3基于8颗卫星观测数据的方位角曲线
Figure 25. Azimuth curves of algorithm 3 based on observation data of eight satellites

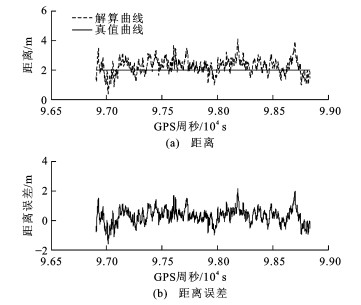
图 26 算法4基于8颗卫星观测数据的距离曲线
Figure 26. Distance curves of algorithm 4 based on observation data of eight satellites

图 27 算法4基于8颗卫星观测数据的方位角曲线
Figure 27. Azimuth curves of algorithm 4 based on observation data of eight satellites
表 1 基于4颗卫星的计算结果
Table 1. Calculated result based on four satellites

表 2 基于6颗卫星的计算结果
Table 2. Calculated result based on six satellites

表 3 基于8颗卫星的计算结果
Table 3. Calculated result based on eight satellites

-
[1] 李伟, 刘美红, 段登平. 基于简化差分插值滤波的编队卫星相对导航[J]. 上海交通大学学报, 2014, 48(2): 229-233. https://www.cnki.com.cn/Article/CJFDTOTAL-SHJT201402013.htmLI Wei, LIU Mei-hong, DUAN Deng-ping. Relative navigation for spacecraft formation based on simplified divided difference filter[J]. Journal of Shanghai Jiaotong University, 2014, 48(2): 229-233. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-SHJT201402013.htm [2] 武瑾媛, 房建成, 杨照华. 基于扩维卡尔曼滤波的火星探测器脉冲星相对导航方法[J]. 仪器仪表学报, 2013, 34(8): 1711-1716. doi: 10.3969/j.issn.0254-3087.2013.08.005WU Jin-yuan, FANG Jian-cheng, YANG Zhao-hua. ASUKF based relative navigation method for mars probe using pulsar[J]. Chinese Journal of Scientific Instrument, 2013, 34(8): 1711-1716. (in Chinese) doi: 10.3969/j.issn.0254-3087.2013.08.005 [3] 刘雪奎, 孙兆伟, 张健, 等. 基于粒子滤波的通信保障航天器相对导航方法[J]. 哈尔滨工业大学学报, 2012, 44(11): 27-30, 80. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBX201211006.htmLIU Xue-kui, SUN Zhao-wei, ZHANG Jian, et al. Relative navigation method of communication supporting space-craft base-on particle filter[J]. Journal of Harbin Institute of Technology, 2012, 44(11): 27-30, 80. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HEBX201211006.htm [4] 李轶, 张善从. 基于视线测量的航天器相对导航滤波方法研究[J]. 仪器仪表学报, 2012, 33(6): 1201-1209. doi: 10.3969/j.issn.0254-3087.2012.06.001LI Yi, ZHANG Shan-cong. Relative navigation filter algorithm for spacecrafts based on line-of-sight[J]. Chinese Journal of Scientific Instrument, 2012, 33(6): 1201-1209. (in Chinese) doi: 10.3969/j.issn.0254-3087.2012.06.001 [5] 王楷, 陈统, 徐世杰. 基于双视线测量的相对导航方法[J]. 航空学报, 2011, 32(6): 1084-1091. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201106016.htmWANG Kai, CHEN Tong, XU Shi-jie. A method of double line-of-sight measurement relative navigation[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(6): 1084-1091. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201106016.htm [6] LEE J Y, KIM H S, CHOI K H, et al. Design of adaptive filtering algorithm for relative navigation[C]∥IAENG. Proceedings of the World Congress on Engineering and Computer Science 2013. Hong Kong: Newswood Limited, 2013: 892-896. [7] D'AMICO S, LARSSON R. Navigation and control of the PRISMA formation: in-orbit experience[J]. Journal of Mechanics Engineering and Automation, 2012, 2(5): 312-320. [8] CHAMON L F O, LOPES C G. Combination of adaptive filters for relative navigation[C]∥EURASIP. 19th European Signal Processing Conference. Warsaw: EURASIP, 2011: 1771-1775. [9] RENGA A, GRASSI M, TANCREDI U. Relative navigation in LEO by carrier-phase differential GPS with intersatellite ranging augmentation[J]. International Journal of Aerospace Engineering, 2013, 2013: 1-11. [10] LEISHMAN R C. A vision-based relative navigation approach for autonomous multirotor aircraft[D]. Provo: Brigham Young University, 2013. [11] LI R, JIAO Y Y, LI Y, et al. Simulation platform for relative navigation using GPS carrier phase measurements for satellite formation flying missions[C]∥IGNSS. International Global Navigation Satellite Systems Society IGNSS Symposium 2011. Tweed Heads: IGNSS, 2011: 1-13. [12] 张共愿, 程咏梅, 程承, 等. 基于相对导航的多平台INS误差联合修正方法[J]. 航空学报, 2011, 32(2): 271-280. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201102012.htmZHANG Gong-yuan, CHENG Yong-mei, CHENG Cheng, et al. A joint correcting method of multi-platform INS error based on relative navigation[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(2): 271-280. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201102012.htm [13] 邓泓, 仲惟超, 孙兆伟, 等. 拦截卫星相对导航算法研究[J]. 哈尔滨工业大学学报, 2013, 45(2): 83-87. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBX201302014.htmDENG Hong, ZHONG Wei-chao, SUN Zhao-wei, et al. Relative navigation research of intercepting satellite[J]. Journal of Harbin Institute of Technology, 2013, 45(2): 83-87. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HEBX201302014.htm [14] 吕纪远, 周军, 刘莹莹. 自适应滤波在空间机动目标相对导航中的应用[J]. 西北工业大学学报, 2011, 29(4): 564-568. https://www.cnki.com.cn/Article/CJFDTOTAL-XBGD201104013.htmLU Ji-yuan, ZHOU Jun, LIU Ying-ying. Applying auto-adaptation filter to tracking of maneuvering target in special relative navigation[J]. Journal of Northwestern Polytechnical University, 2011, 29(4): 564-568. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XBGD201104013.htm [15] 王小刚, 郭继峰, 崔乃刚. 一种鲁棒Sigma-point滤波算法及其在相对导航中的应用[J]. 航空学报, 2010, 31(5): 1024-1029. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201005023.htmWANG Xiao-gang, GUO Ji-feng, CUI Nai-gang. Robust Sigma-point filtering and its application to relative navigation[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(5): 1024-1029. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201005023.htm [16] 刘承奇, 贾英宏, 徐世杰. 四种卡尔曼滤波器在仅视线测量相对导航中的性能比较[J]. 空间控制技术与应用, 2014, 40(1): 52-57. https://www.cnki.com.cn/Article/CJFDTOTAL-KJKZ201401013.htmLIU Cheng-qi, JIA Ying-hong, XU Shi-jie. Comparison of four different Kalman filters for relative navigation based on line-of-sight-only measurement[J]. Aerospace Control and Application, 2014, 40(1): 52-57. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KJKZ201401013.htm [17] 刘勇, 徐鹏, 徐世杰. 航天器自主交会对接的视觉相对导航方法[J]. 中国空间科学技术, 2013, 33(6): 33-40. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGKJ201306006.htmLIU Yong, XU Peng, XU Shi-jie. Vision-based relative navigation for rendezvous and docking of spacecraft[J]. Chinese Space Science and Technology, 2013, 33(6): 33-40. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGKJ201306006.htm [18] WANG Da. Cooperative V2X relative navigation using tight-integration of DGPS and V2X UWB range and simulated bearing[D]. Calgary: University of Calgary, 2015. [19] 王秀森, 周红进, 张尚悦. 基于GPS伪距单差的舰船相对导航方法[J]. 中国惯性技术学报, 2012, 20(4): 464-467. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ201204019.htmWANG Xiu-sen, ZHOU Hong-jin, ZHANG Shang-yue. Relative navigation between vessels based on GPS single difference[J]. Journal of Chinese Inertial Technology, 2012, 20(4): 464-467. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ201204019.htm [20] 宋伟, 周红进, 王秀森. Kalman滤波应用于GPS相对导航信息解算方法[J]. 舰船科学技术, 2013, 35(6): 65-68. https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201306018.htmSONG Wei, ZHOU Hong-jin, WANG Xiu-sen. Research on relative navigation method based on GPS using Kalman filter[J]. Ship Science and Technology, 2013, 35(6): 65-68. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201306018.htm -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 608
- HTML全文浏览量: 85
- PDF下载量: 475
- 被引次数: 0
