

Design method of holographic optimal sliding mode controller for semi-active suspension of vehicle
-
摘要: 为使半主动悬架在名义工况下获得尽可能优的使用性能, 保证在变参数/行驶工况下具有良好的鲁棒性, 提出一种车辆半主动悬架全息最优滑模控制器设计方法。基于车辆模型分析了现有最优滑模控制器不能使半主动悬架在名义工况下获得较优性能与在变参数/行驶工况下鲁棒性较差的原因。通过对半主动悬架控制系统状态方程进行扩展, 构建了不丢失任何系统结构与期望性能信息的滑模流形函数, 据此设计了半主动悬架全息最优滑模控制器。通过变参数多工况数值仿真对比了采用现有最优滑模控制器的半主动悬架、采用全息滑模控制器的半主动悬架与被动悬架的性能。分析结果表明: 在名义工况下, 采用全息最优滑模控制器的半主动悬架的综合性能较采用现有最优滑模控制器的半主动悬架与被动悬架的综合性能分别提高了88.30%、38.33%;在变参数工况下, 采用全息最优滑模控制器的半主动悬架、采用现有最优滑模控制器的半主动悬架和被动悬架的综合性能指标的最大波动分别是26.22%、74.42%、46.39%;在变行驶工况下, 采用全息最优滑模控制器的半主动悬架、采用现有最优滑模控制器的半主动悬架和被动悬架的综合性能指标的最大波动分别是78.55%、106.22%、115.06%。可见, 相比于被动悬架与采用现有最优滑模控制器的半主动悬架, 采用全息最优滑模控制器的半主动悬架可获得更好的名义工况使用性能与变工况鲁棒性。Abstract: To obtain both better comprehensive performance of semi-active suspension under the nominal running condition and the enhanced robustness under the variation parameters/running condition, a design method of holographic optimal sliding mode (HOSM) controller for the semiactive suspension of vehicle was developed.First, when the current optimal sliding mode (COSM) controller was applied, the poorer reasons of the comprehensive performance of semiactive suspension under the nominal running condition and the robustness under the variation parameters/running condition were analyzed.Second, the state equations of control system for the semi-active suspension were augmented, a sliding mode manifold function considering all ofstructural and expected information of suspension was established, and a novel HOSM controller was designed.Finally, based on the numerical simulation, the control result of the proposed controller was compared with the control result of COSM controller and the performance of passive suspension.Analysis result shows that the comprehensive performance of semi-active suspension controlled by the HOSM controller increases by 88.30% and 38.33% compared with the values of the semi-active suspension controlled by the COSM controller and the passive suspension in the nominal running condition; under the variation parameter condition, the maximum fluctuations of comprehensive performance indexes of the suspensions controlled by the HOSM controller and the COSM controller and the passive suspension are 26.22%, 74.42%, and 46.39%, respectively; under the variation running condition, the maximum fluctuations of comprehensive performance indexes of the suspensions controlled by the HOSM controller and the COSM controller and the passive suspension are 78.55%, 106.22%, and 115.06%, respectively.Therefore, using the HOSM controller can not only achieve better comprehensive performance of semi-active suspension under the nominal running condition, but also achieve better robustness compared with the HOSM controller and the passive suspension.
-

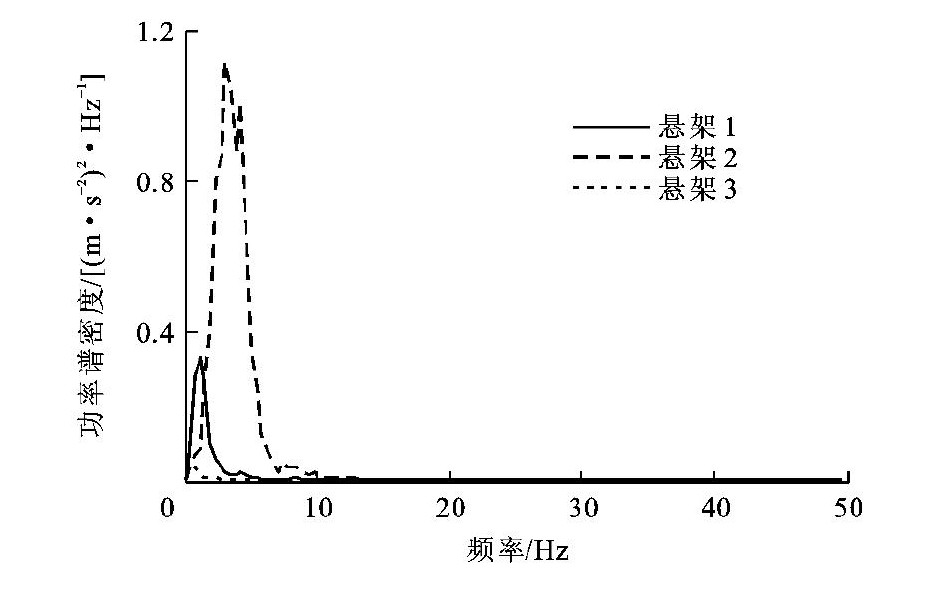
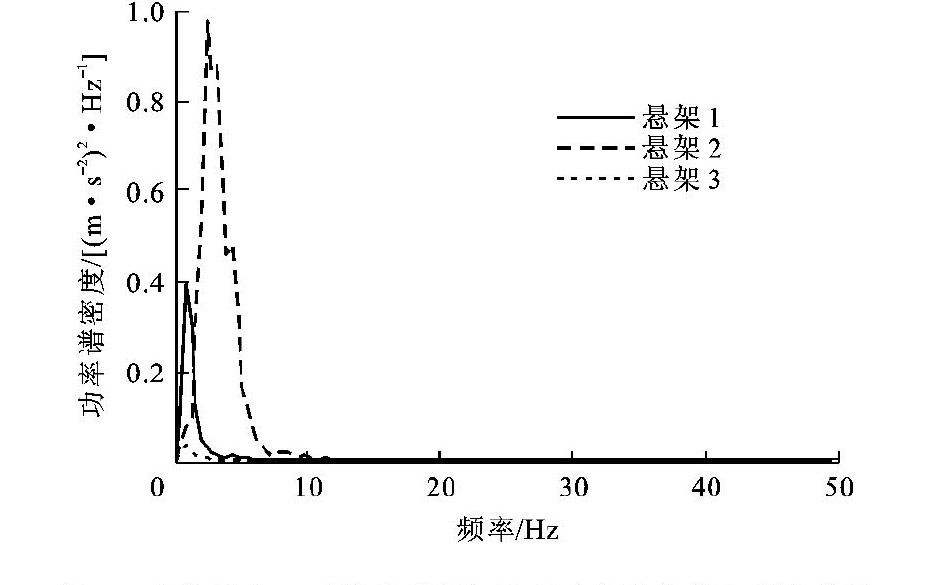
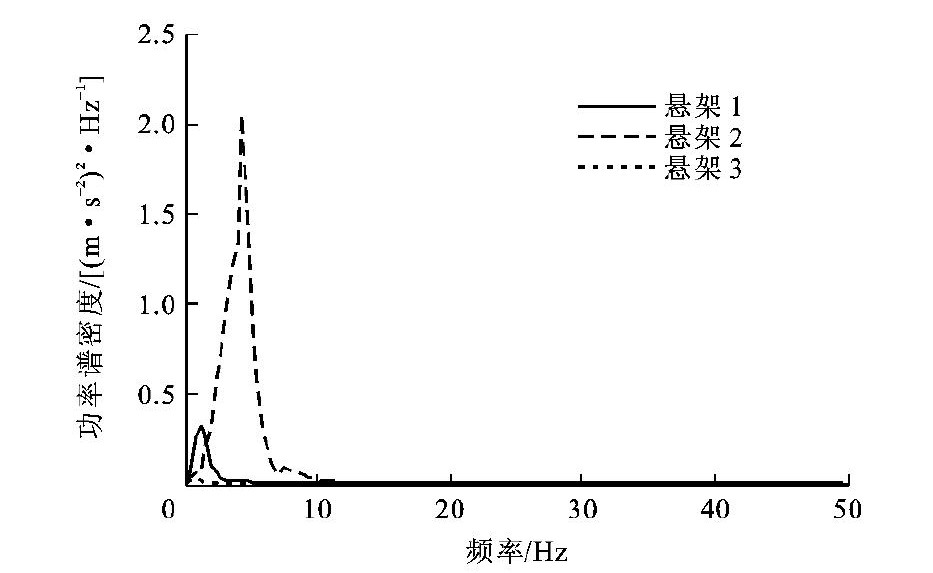
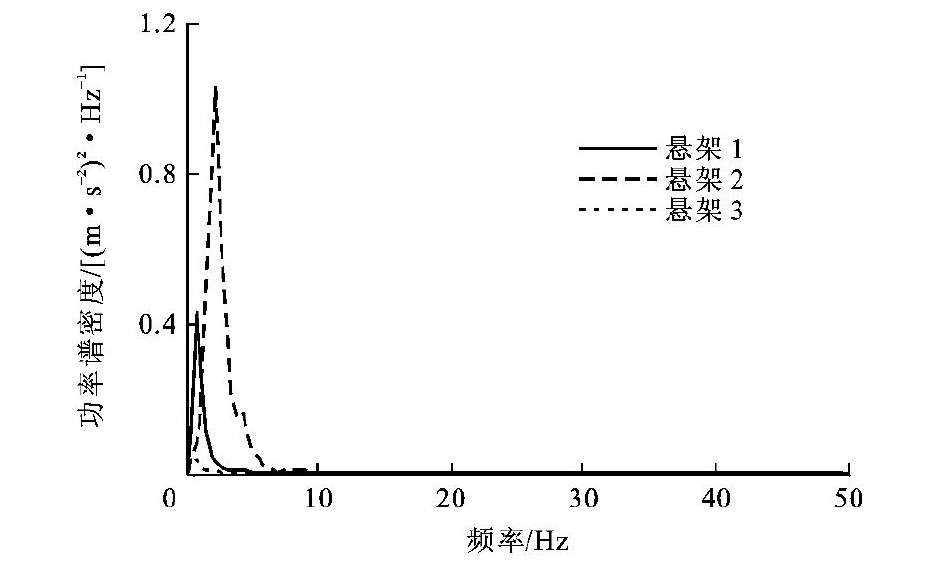
图 3 名义工况下簧载质量加速度功率谱密度与频率曲线
Figure 3. Curves of power spectral density of sprung mass acceleration and frequency under nominal running condition

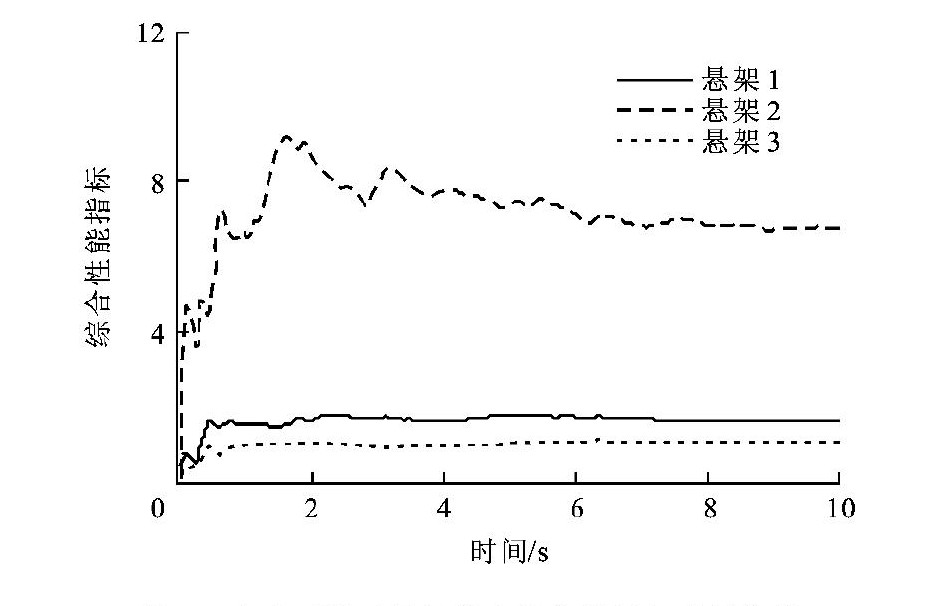
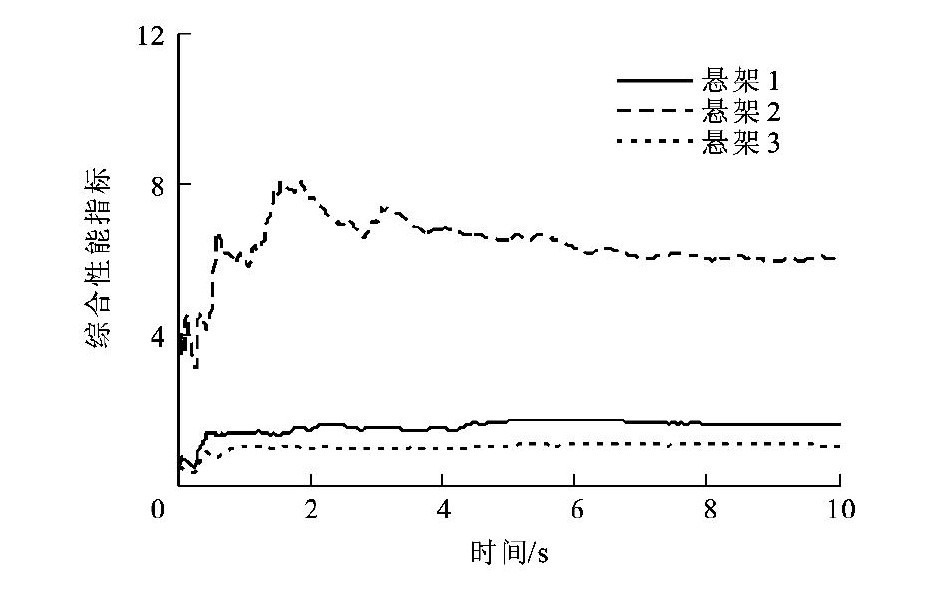
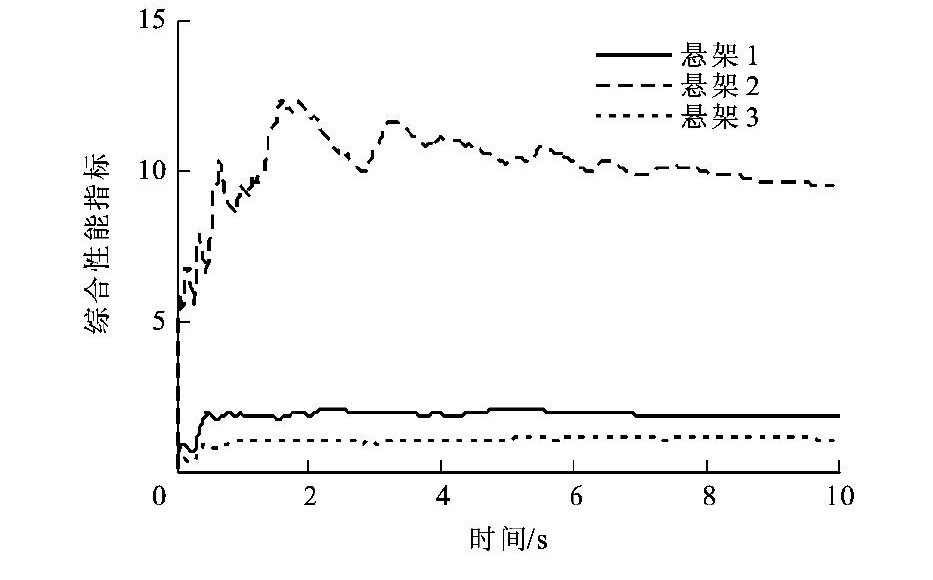
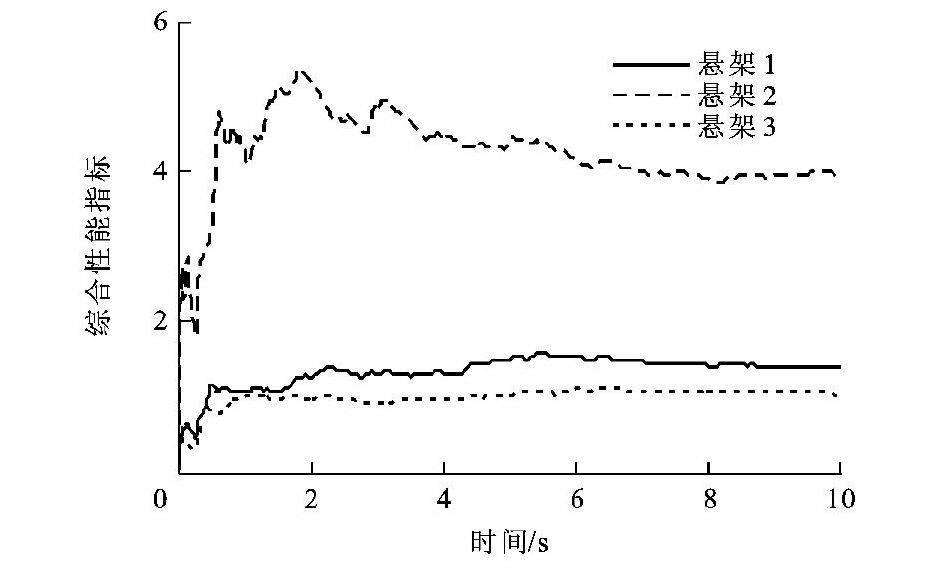
图 4 名义工况下悬架综合性能指标与时间曲线
Figure 4. Curves of suspension comprehensive performance index and time under nominal running condition

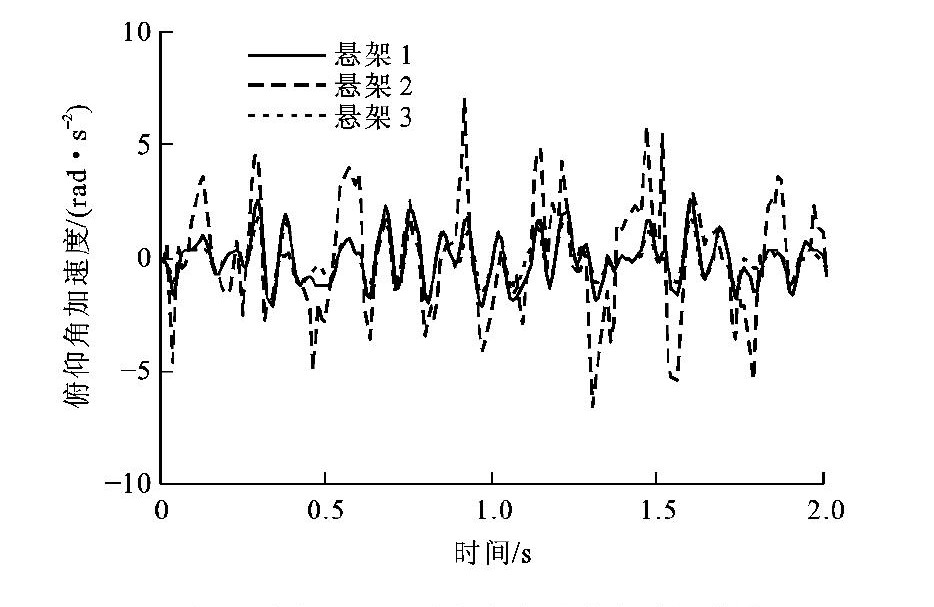
图 5 名义工况下俯仰角加速度与时间曲线
Figure 5. Curves of pitch angle acceleration and time under nominal running condition

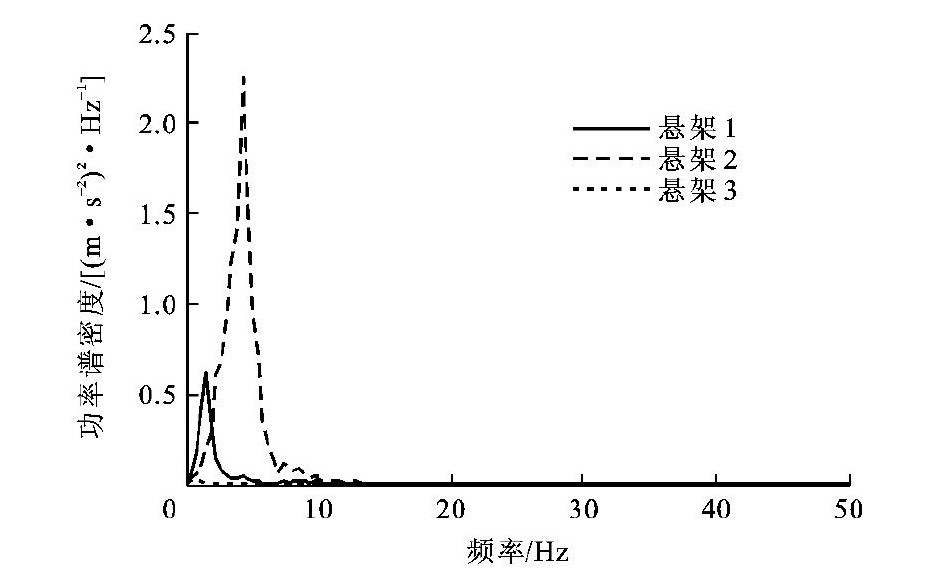
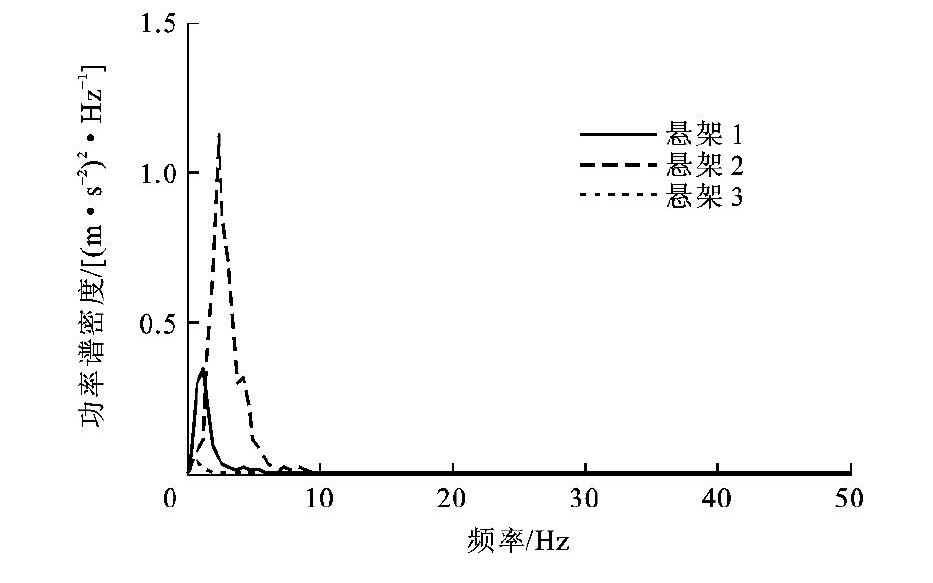
图 6 参数状态1下簧载质量加速度功率谱密度与频率曲线
Figure 6. Curves of power spectral density of sprung mass acceleration and frequency under parameter condition 1

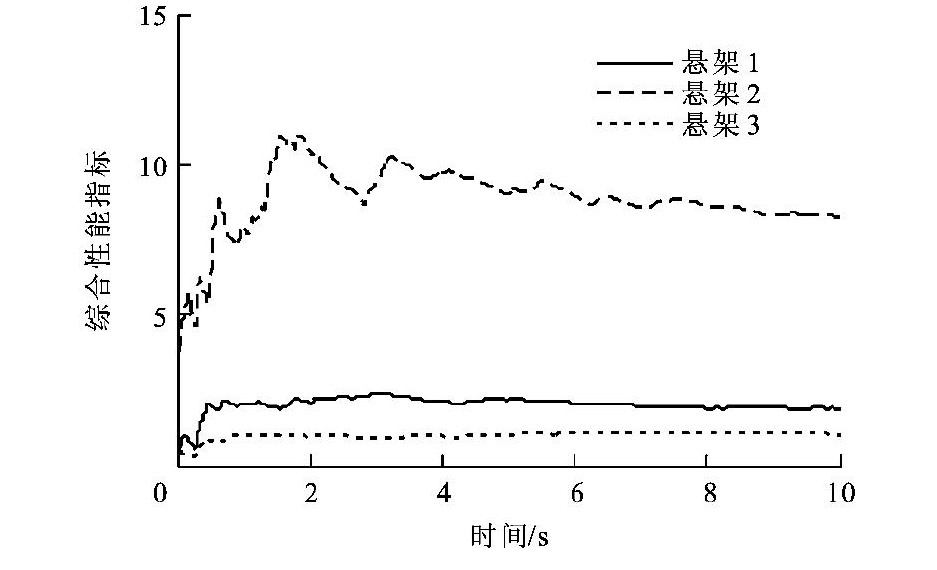
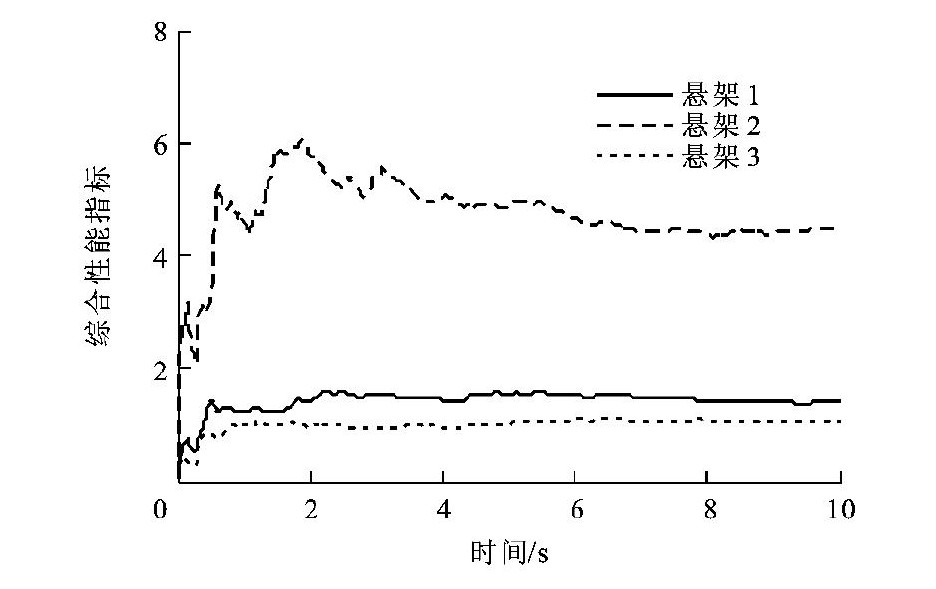
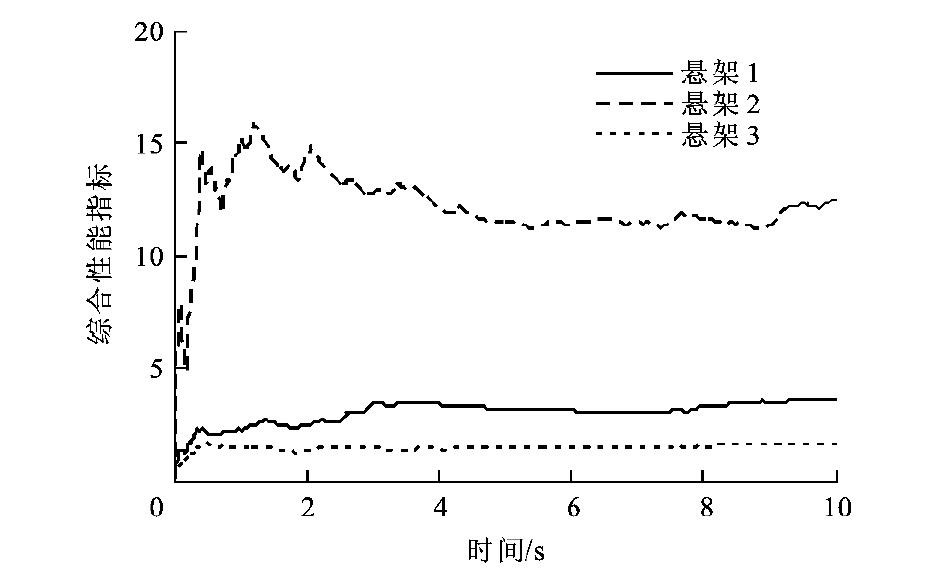
图 7 参数状态1下悬架综合性能指标与时间曲线
Figure 7. Curves of suspension comprehensive performance index and time under parameter condition 1

图 8 参数状态2下簧载质量加速度功率谱密度与频率曲线
Figure 8. Curves of power spectral density of sprung mass acceleration and frequency under parameter condition 2

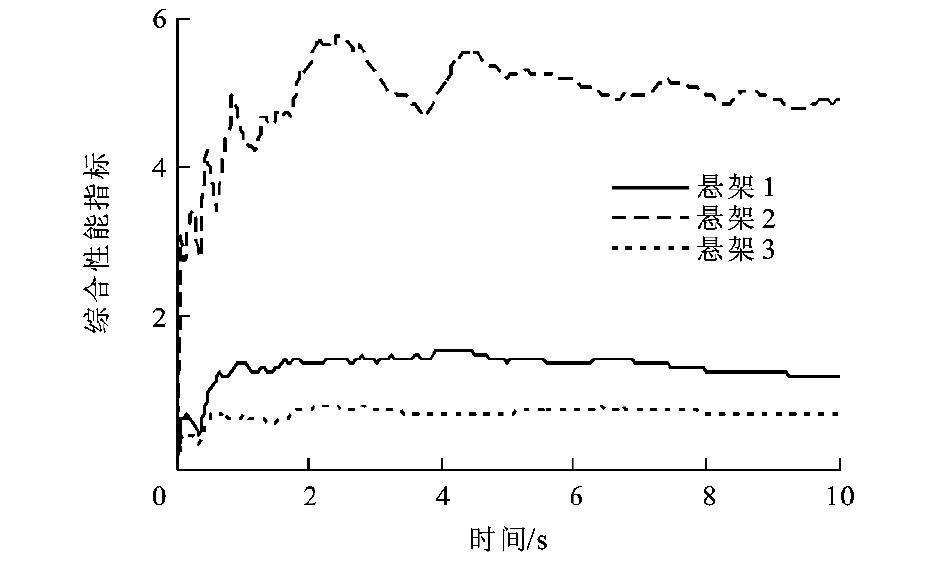
图 9 参数状态2下悬架综合性能指标与时间曲线
Figure 9. Curves of suspension comprehensive performance index and time under parameter condition 2

图 10 参数状态3下簧载质量加速度功率谱密度与频率曲线
Figure 10. Curves of power spectral density of sprung mass acceleration and frequency curves under parameter condition 3

图 11 参数状态3下悬架综合性能指标与时间曲线
Figure 11. Curves of suspension comprehensive performance index and time under parameter condition 3

图 12 参数状态4下簧载质量加速度功率谱密度与频率曲线
Figure 12. Curves of power spectral density of sprung mass acceleration and frequency under parameter condition 4

图 13 参数状态4下悬架综合性能指标与时间曲线
Figure 13. Curves of suspension comprehensive performance index and time under parameter condition 4

图 14 参数状态5下簧载质量加速度功率谱密度与频率曲线
Figure 14. Curves of power spectral density of sprung mass acceleration and frequency under parameter condition 5

图 15 参数状态5下悬架综合性能指标与时间曲线
Figure 15. Curves of suspension comprehensive performance index and time under parameter condition 5

图 16 行驶工况1下悬架综合性能指标与时间曲线
Figure 16. Curves of suspension comprehensive performance index and time under running condition 1

图 17 行驶工况2下悬架综合性能指标与时间曲线
Figure 17. Curves of suspension comprehensive performance index and time under running condition 2
-
[1] 陈龙, 杨晓峰, 汪若尘, 等. 基于二元件ISD结构隔振机理的车辆被动悬架设计与性能研究[J]. 振动与冲击, 2013, 32(6): 90-95. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ201306018.htmCHEN Long, YANG Xiao-feng, WANG Ruo-chen, et al. Design and performance study of vehicle passive suspension based on two-element inerter-spring-damper structure vibration isolation mechanism[J]. Journal of Vibration and Shock, 2013, 32(6): 90-95. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ201306018.htm [2] 聂佳梅, 张孝良, 胡贝, 等. 车辆被动悬架技术发展新方向[J]. 车辆与动力技术, 2012(2): 59-64. https://www.cnki.com.cn/Article/CJFDTOTAL-BGTK201202015.htmNIE Jia-mei, ZHANG Xiao-liang, HU Bei, et al. A new approach of vehicle passive suspension techniques[J]. Vehicle and Power Technology, 2012(2): 59-64. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-BGTK201202015.htm [3] SUN Wei-chao, GAO Hui-jun, YAO Bin. Adaptive robust vibration control of full-car active suspension with electrohydraulic actuators[J]. IEEE Transactions on Control Systems Technology, 2013, 21(6): 2417-2428. doi: 10.1109/TCST.2012.2237174 [4] 陈士安, 王勇刚, 王东, 等. 无外界动力源主动悬架的能量可用性[J]. 交通运输工程学报, 2012, 12(2): 46-52. https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC201202010.htmCHEN Shi-an, WANG Yong-gang, WANG Dong, et al. Energy availability of active suspension without external energy supply[J]. Journal of Traffic and Transportation Engineering, 2012, 12(2): 46-52. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC201202010.htm [5] 叶光湖, 吴光强. 汽车磁流变减振器半主动空气悬架仿真研究[J]. 汽车工程, 2015, 37(5): 560-565. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201505014.htmYE Guang-hu, WU Guang-qiang. A study on the simulation of semi-active air suspension with magneto-rheological damper[J]. Automotive Engineering, 2015, 37(5): 560-565. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201505014.htm [6] 宗长富, 李刚, 郑宏宇. 线控汽车底盘控制技术研究进展及展望[J]. 中国公路学报, 2013, 26(2): 160-176. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201302024.htmZONG Chang-fu, LI Gang, ZHENG Hong-yu. Study prograss and outlook of classis control technology for X-bywire automobile[J]. China Journal of Highway and Transport, 2013, 26(2): 160-176. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201302024.htm [7] 高晋, 杨秀建, 牛子孺, 等. 扭转梁悬架性能影响因素分析[J]. 江苏大学学报: 自然科学版, 2014, 35(6): 627-634. https://www.cnki.com.cn/Article/CJFDTOTAL-JSLG201406002.htmGAO Jin, YANG Xiu-jian, NIU Zi-ru, et al. Influencing factors analysis of twist beam suspension characteristic[J]. Journal of Jiangsu University: Natural Science Edition, 2014, 35(6): 627-634. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JSLG201406002.htm [8] LI Hong-yi, YU Jin-yong, HILTON C, et al. Adaptive slidingmode control for nonlinear active suspension vehicle systems using T-S fuzzy approach[J]. IEEE Transactions on Industrial Electronics, 2013, 60(8): 3328-3338. doi: 10.1109/TIE.2012.2202354 [9] ZHAO Ying-bo, ZHAO Lin, GAO Hui-jun. Vibration control of seat suspension using H∞ reliable control[J]. Journal of Vibration and Control, 2010, 16(4): 80-85. [10] 柴陵江, 孙涛, 冯金芝, 等. 基于层次分析法的主动悬架LQG控制器设计[J]. 汽车工程, 2010, 32(8): 712-718. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201008016.htmCHAI Ling-jiang, SUN Tao, FENG Jin-zhi, et al. Design of the LQG controller for active suspension system based on analytic hierarchy process[J]. Automotive Engineering, 2010, 32(8): 712-718. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201008016.htm [11] 陈杰平, 冯武堂, 郭万山, 等. 整车磁流变减振器半主动悬架变论域模糊控制策略[J]. 农业机械学报, 2011, 42(5): 8-13, 19. https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201105001.htmCHEN Jie-ping, FENG Wu-tang, GUO Wan-shan, et al. Whole vehicle magnet rorheological fluid damper semi-active suspension variable universe fuzzy control simulation and test[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(5): 8-13, 19. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201105001.htm [12] 郭全民, 雷蓓蓓. 半主动悬架PID控制的研究和优化[J]. 国外电子测量技术, 2015, 34(4): 60-63. https://www.cnki.com.cn/Article/CJFDTOTAL-GWCL201504015.htmGUO Quan-min, LEI Bei-bei. Research and optimization for semi-active suspension PID control[J]. Foreign Electronic Measurement Technology, 2015, 34(4): 60-63. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GWCL201504015.htm [13] 赵成, 胡增荣, 陈大跃. 半主动悬架的滑模变结构控制[J]. 中国公路学报, 2007, 20(3): 109-114. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200703019.htmZHAO Cheng, HU Zeng-rong, CHEN Da-yue. Sliding mode varying structure control for semi-active suspension[J]. China Journal of Highway and Transport, 2007, 20(3): 109-114. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200703019.htm [14] 张望, 喻凡. 基于混合鲁棒控制的电磁主动悬架动力学分析[J]. 机械设计与研究, 2015, 31(4): 173-178. https://www.cnki.com.cn/Article/CJFDTOTAL-JSYY201504050.htmZHANG Wang, YU Fan. Study on dynamics of electromagnetic active suspension based on mix robust control[J]. Machine Design and Reasearch, 2015, 31(4): 173-178. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JSYY201504050.htm [15] CHEN Shi-an, LI Xu, ZHAO Lian-jian, et al. Development of a control method for an electromagnetic semi-active suspension reclaiming energy with varying charge voltage in steps[J]. International Journal of Automotive Technology, 2015, 16(5): 765-773. doi: 10.1007/s12239-015-0077-3 [16] 罗鑫源, 杨世文. 基于AHP的车辆主动悬架LQG控制器设计[J]. 振动与冲击, 2013, 32(2): 102-106. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ201302019.htmLUO Xin-yuan, YANG Shi-wen. Design of a LQG controller for a vehicle active suspension system based on AHP[J]. Journal of Vibration and Shock, 2013, 32(2): 102-106. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ201302019.htm [17] BASIN M, RODRIGUEZ-RAMIREZ P. Sliding mode controller design for linear systems with unmeasured states[J]. Journal of the Franklin Institute, 2012, 349(4): 1337-1349. doi: 10.1016/j.jfranklin.2011.06.019 [18] CASTAS F, FRIDMAN L. Analysis and design of integral sliding manifolds for systems with unmatched perturbations[J]. IEEE Transactions on Automatic Control, 2006, 51(5): 853-862. doi: 10.1109/TAC.2006.875008 [19] ZHANG B L, TANG G Y, CAO F L. Optimal sliding mode control for active suspension systems[J]//IEEE. Proceedings of the 2009 IEEE International Conference on Networking, Sensing and Control. New York: IEEE, 2009: 351-356. [20] 陈杰平, 朱茂飞, 祝辉. 基于磁流变减振器不确定半车悬架模型的半主动鲁棒控制研究[J]. 机械设计与制造, 2011(4): 110-112.CHEN Jie-ping, ZHU Mao-fei, ZHU Hui. Semiactive robust control development of uncertainty half-car model based on magnetorheological damper, 2011(4): 110-112. (in Chinese). [21] 赵彩虹, 陈士安, 王骏骋. 刚度和阻尼系数对LQG控制主动悬架控制的影响分析[J]. 农业机械学报, 2015, 46(12): 301-308. https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201512041.htmZHAO Cai-hong, CHEN Shi-an, WANG Jun-cheng. Influences of stiffness and damping parameters on control of active suspension based on LQG[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(12): 301-308. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201512041.htm [22] 陈士安, 邱峰, 何仁, 等. 一种悬架LQG控制加权系数的方法[J]. 振动与冲击, 2008, 27(2): 65-68, 176. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ200802013.htmCHEN Shi-an, QIU Feng, HE Ren, et al. A method for choosing weights in a suspension LQG controller[J]. Journal of Vibration and Shock, 2008, 27(2): 65-68, 176. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ200802013.htm [23] UTKIN V I, YANG K D. Methods for constructing discontinuity planes in multidimensional variable structure systems[J]. Automation and Remote Control, 1978(10): 72-77. [24] 高远, 许伟, 蓝会立. 基于微分几何的非线性汽车悬架模糊滑模控制研究[J]. 合肥工业大学学报: 自然科学版, 2014, 37(3): 266-271. https://www.cnki.com.cn/Article/CJFDTOTAL-HEFE201403003.htmGAO Yuan, XU Wei, LAN Hui-li. Fuzzy sliding mode control for nonlinear vehicle suspension based on differential geometry[J]. Journal of Hefei University of Technology: Natural Science, 2014, 37(3): 266-271. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HEFE201403003.htm [25] IGNACIUK P, BARTOSZEWICZ A. LQ optimal sliding-mode supply policy for periodic-review perishable inventory systems[J]. Journal of the Franklin Institute, 2012, 349(4): 1561-1582. doi: 10.1016/j.jfranklin.2011.04.003 -

 下载:
下载:







 点击查看大图
点击查看大图
计量
- 文章访问数: 710
- HTML全文浏览量: 154
- PDF下载量: 966
- 被引次数: 0
