

Algorithm design and implementation for a real-time lane departure pre-warning system
-
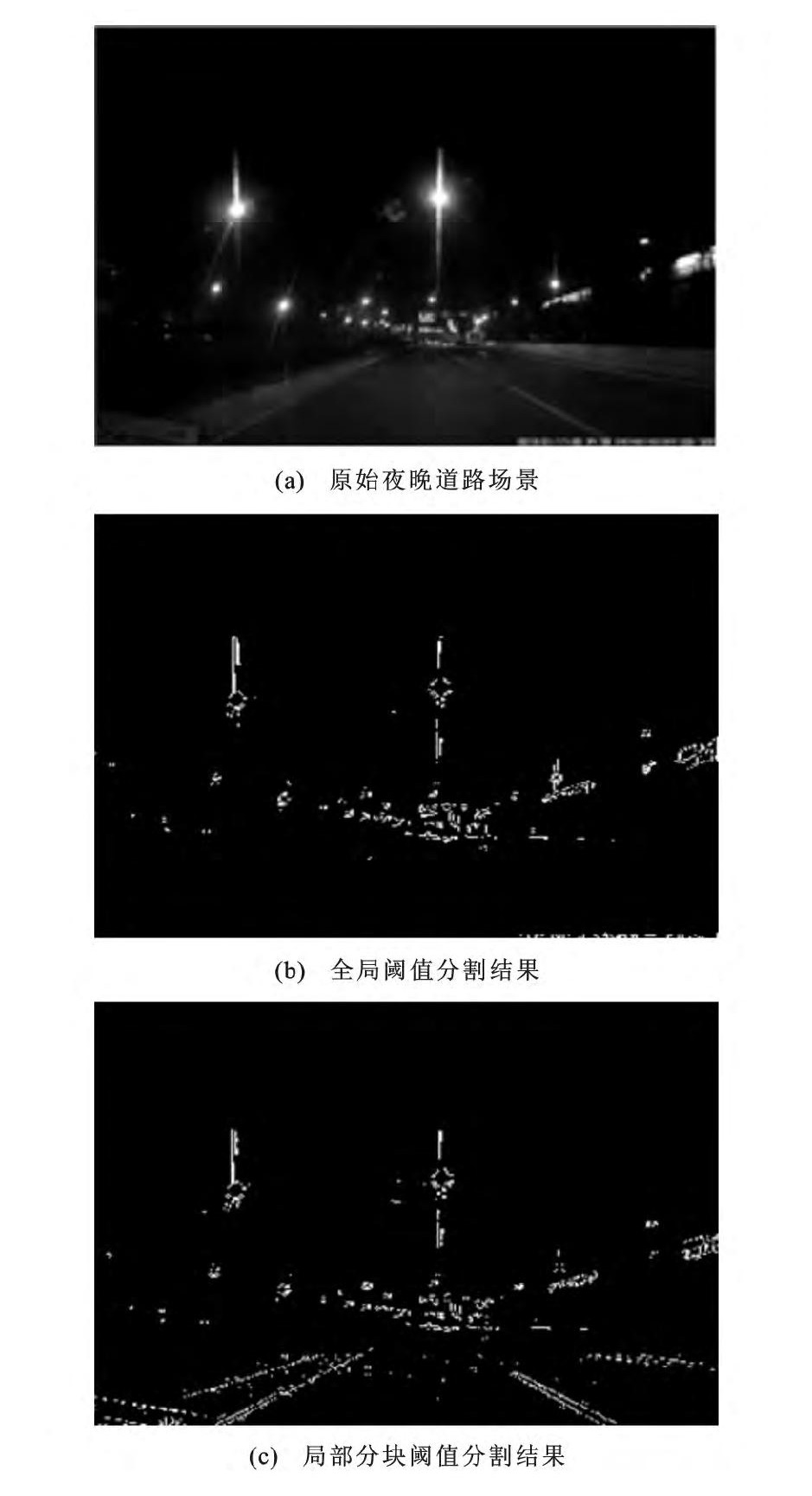
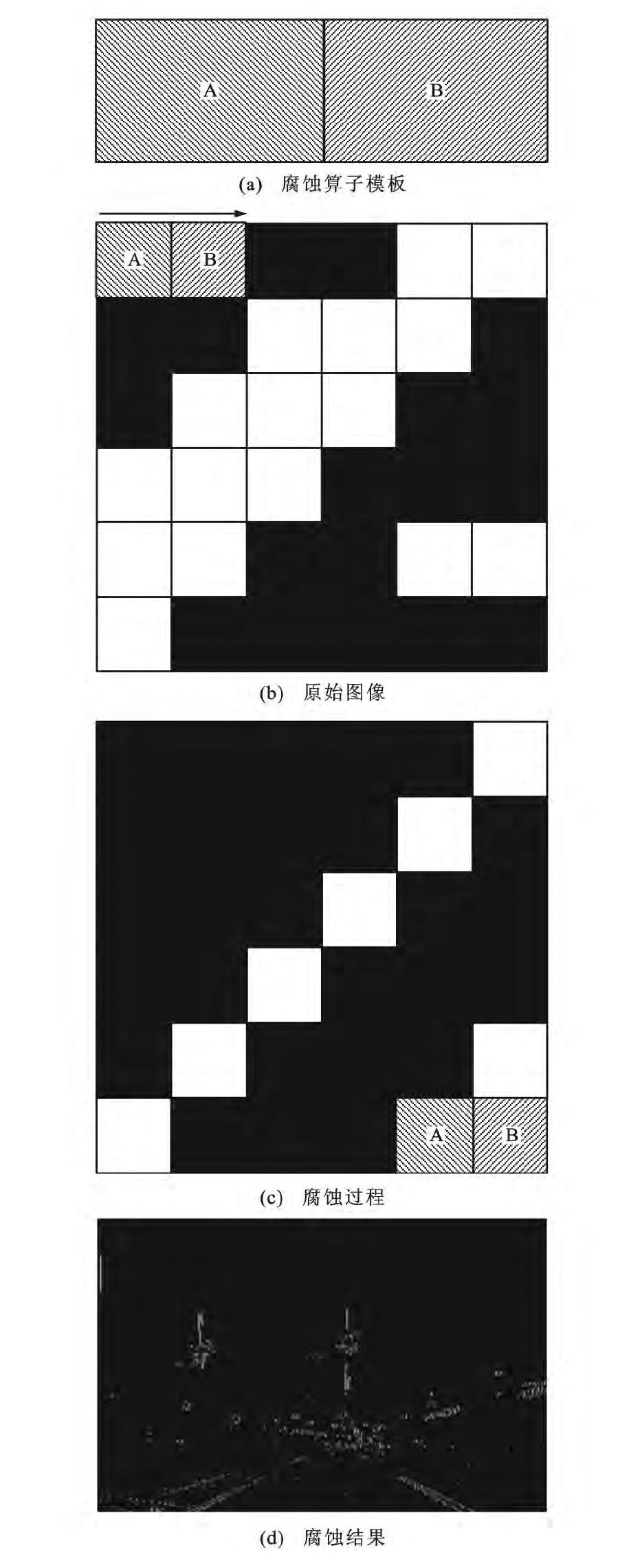
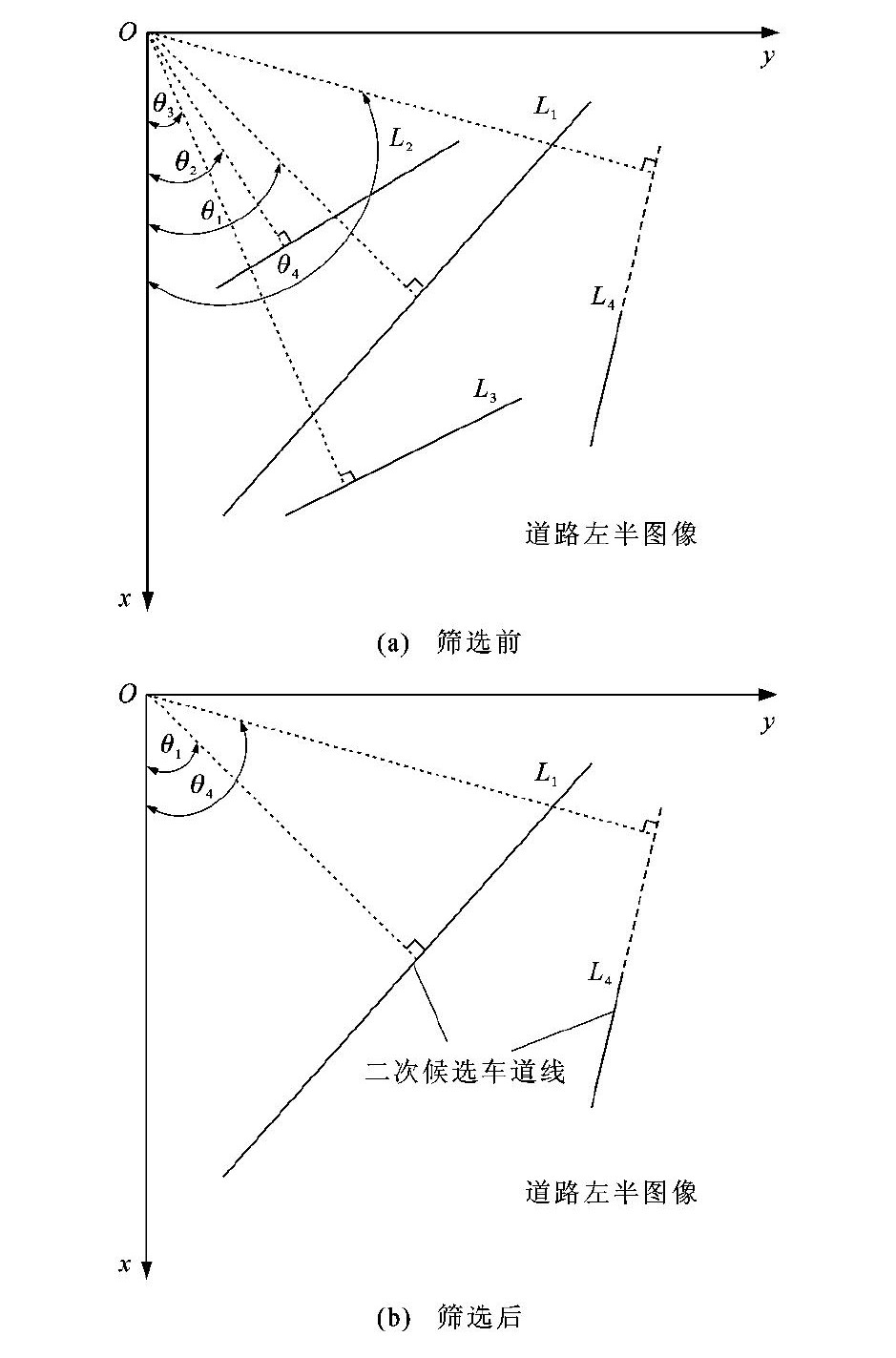
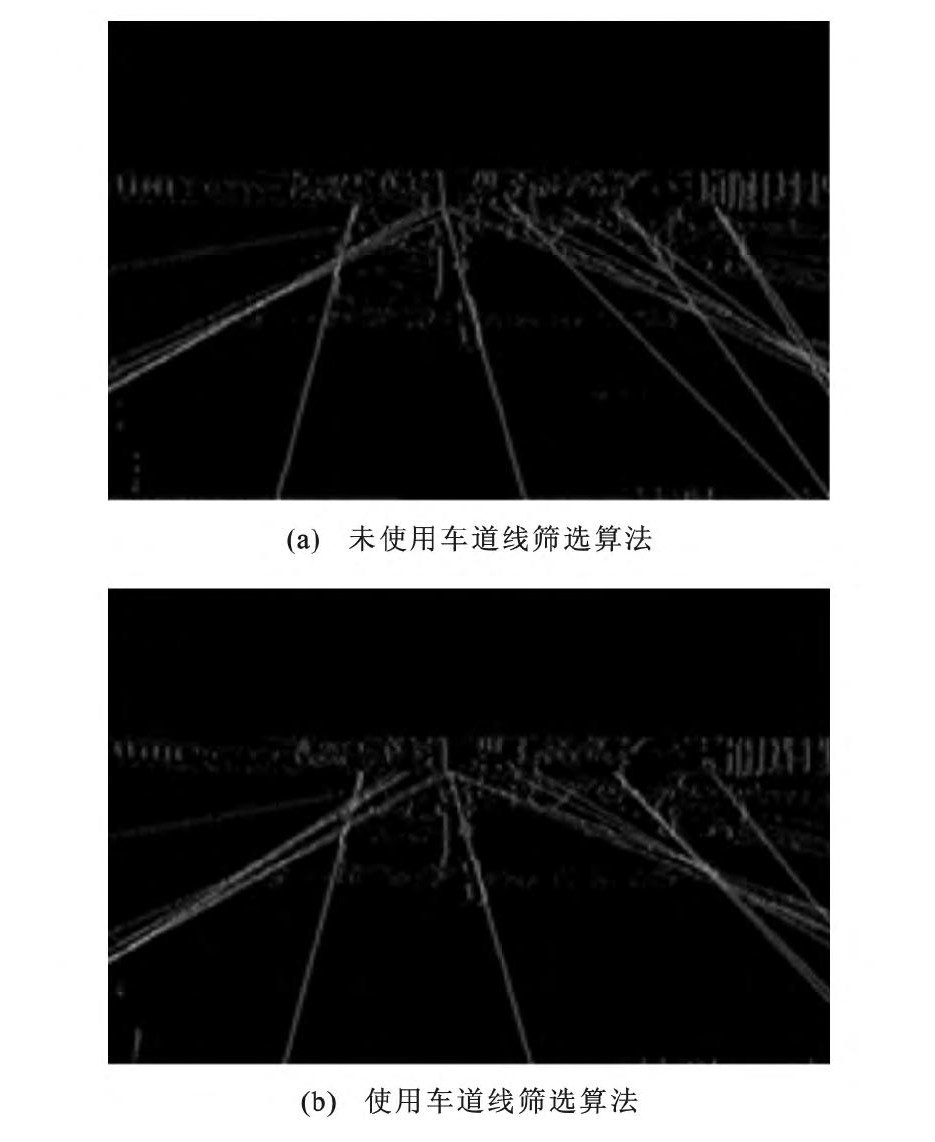
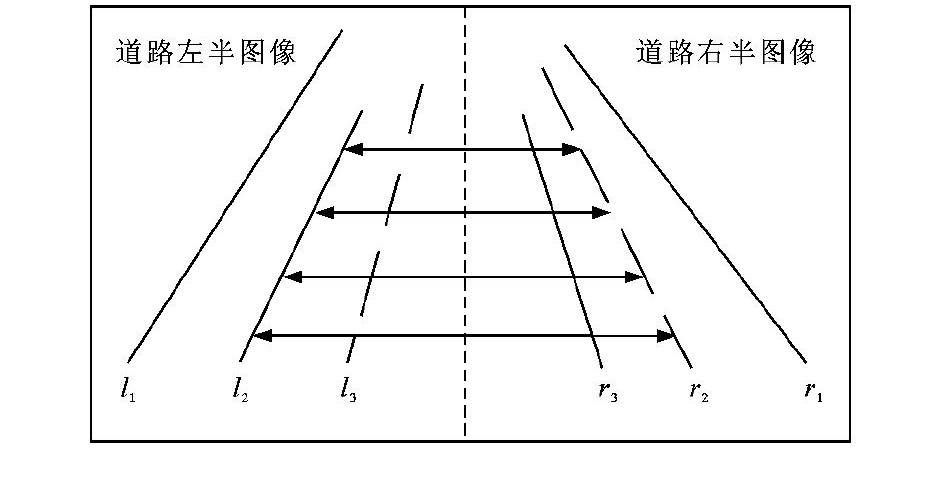
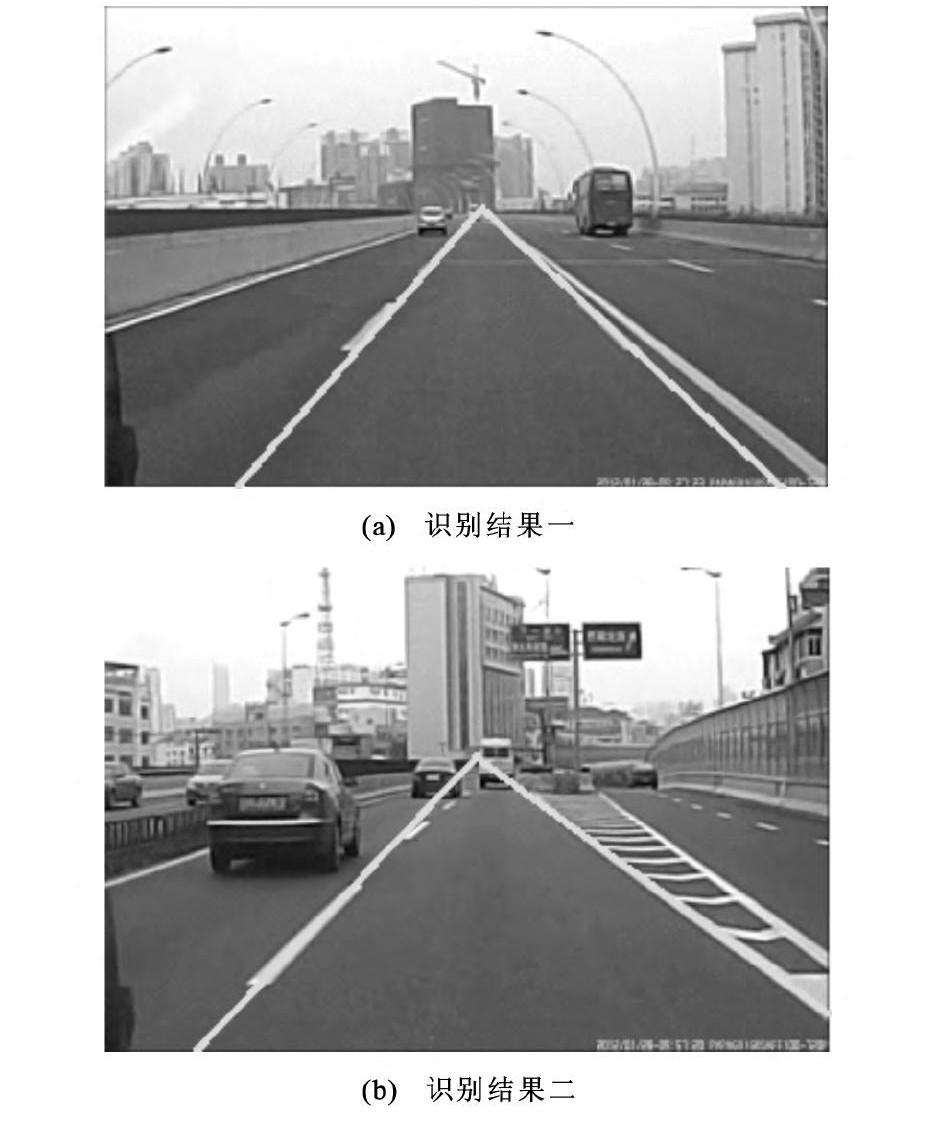
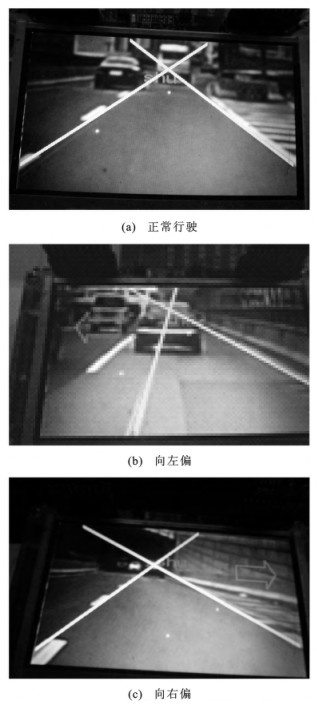
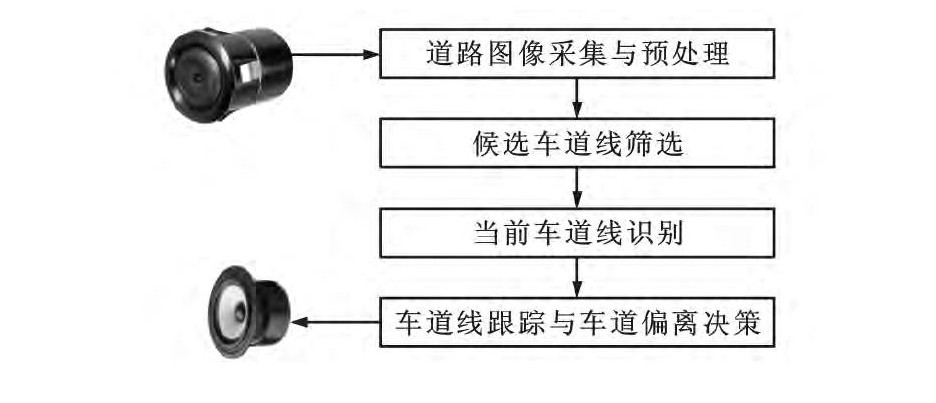
摘要: 针对实时车道线偏离预警问题, 采用一种横向腐蚀算子对边缘检测后的图像进行腐蚀, 减少和消除图像中无关的边缘信息, 从而显著减少后续处理数据量; 提出一种以大津法为基础的边缘梯度图像分块阈值选取方法以便在不均匀光照条件下对道路边缘图像进行有效分割; 结合车道线在路面分布的几何特征、Hough投票结果、道路图像之间的相关性和车道线宽度特征, 提出了候选车道线筛选和计分算法对多车道场景进行车道线识别, 采用卡尔曼滤波法对车道线进行跟踪, 应用车道线偏离预警系统算法软件进行了试验验证。试验结果表明: 道路图像总帧数为24 661, 其中确检帧数为23 483, 误检帧数为1 178, 平均检测正确率为95.22%, 因此, 算法是正确的和有效的, 可以较好地满足车道线偏离预警系统实时性和鲁棒性的要求。Abstract: Aiming at the real-time lane departure pre-warning question, a lateral erosion operator was used to corrode the image after edge detection, and the irrelevant edge information in image was reduced and eliminated to decrease the follow-up processing data quantity significantly.A threshold selection method of edge gradient image block based on Otsu algorithm was proposed to effectively partition road edge image under asymmetrical illumination.A lane line voting selection and scoring algorithm combining the geometrical characteristics of lane line distribution on road, Hough voting results, the correlation of road images and the width characteristics of lane line was proposed to recognize the lane line in multilane scenes.Kalman filter method was applied to track the lane line.The algorithm software of lane departure pre-warning system was used to carry out the test verification.Test result shows that total frame number of road images is 24 661, the frame number of right detection is 23 483, and the frame number of wrong detection is 1 178, and the average detection accuracy is 95.22%.The test verified the correctness and effectiveness of the algorithm, which can satisfy the real-time feature and robustness of lane departure prewarning system.
-
[1] 米萍, 王静, 王丽丽, 等. 基于机器视觉的智能车辆道路偏离预警系统的研究[J]. 微计算机信息, 2009, 25(36): 40-41. https://www.cnki.com.cn/Article/CJFDTOTAL-WJSJ200936019.htmMI Ping, WANG Jing, WANG Li-li, et al. A study of machine vision-based lane departure warning system about intelligent vehicle[J]. Microcomputer Information, 2009, 25(36): 40-41. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-WJSJ200936019.htm [2] WANG Rong-ben, GUO Lie, JIN Li-sheng, et al. Review on the research of intelligent vehicle safety driving assistant technology[J]. Journal of Highway and Transportation Research and Development, 2007, 24(7): 107-111. (in Chinese) doi: 10.3969/j.issn.1002-0268.2007.07.025 [3] MAY J F, BALDWIN C L. Driver fatigue: the importance of identifying causal factors of fatigue when considering detection and countermeasure technologies[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2009, 12(3): 218-224. doi: 10.1016/j.trf.2008.11.005 [4] DAGAN E, MANO O, STEIN G P, et al. Forward collision warning with a single camera[C]//IEEE. Proceedings of the 2004 IEEE Intelligent Vehicles Symposium. New York: IEEE, 2004: 37-42. [5] 肖延胜. 为极速智能车保驾护航——记清华大学计算机系THMR课题组之智能汽车研究[J]. 中国发明与专利, 2011(12): 120-121. doi: 10.3969/j.issn.1672-6081.2011.12.041XIAO Yan-sheng. Escort top speed smart car—record of smart automotive research in THMR group, Department of Computer Science and Technology, Tsinghua University[J]. China Invention and Patent, 2011(12): 120-121. (in Chinese). doi: 10.3969/j.issn.1672-6081.2011.12.041 [6] 康厚俊. CMOS图像传感器与CCD的比较及发展现状[J]. 才智, 2008(9): 239-240. https://www.cnki.com.cn/Article/CJFDTOTAL-CAIZ200809184.htmKANG Hou-jun. The comparison and the current developments of CMOS image sensors and CCD[J]. Intelligence, 2008(9): 239-240. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-CAIZ200809184.htm [7] 金宝智. 图像传感器: CCD与CMOS的对比[J]. 现代电视技术, 2005(5): 80-81. doi: 10.3969/j.issn.1671-8658.2005.05.022JIN Bao-zhi. Image sensor: comparison of CCD and CMOS[J]. Advanced Television Engineering, 2005(5): 80-81. (in Chinese). doi: 10.3969/j.issn.1671-8658.2005.05.022 [8] 朱钐. 基于DSP道路识别技术研究[D]. 武汉: 武汉理工大学, 2010.ZHU Shan. Research on technology of road recognition based on DSP[D]. Wuhan: Wuhan University of Technology, 2010. (in Chinese). [9] 刘祝华. 图像去噪方法的研究[D]. 南昌: 江西师范大学, 2005.LIU Zhu-hua. Research on image de-noising methods[D]. Nanchang: Jiangxi Normal University, 2005. (in Chinese). [10] 朱志恩. 中值滤波技术在图像处理中的应用研究[D]. 沈阳: 东北大学, 2008.ZHU Zhi-en. Application research on median filtering technique in image processing[D]. Shenyang: Northeastern University, 2008. (in Chinese). [11] 马小龙. 基于视觉的复杂光照条件下的车道检测及识别[D]. 成都: 电子科技大学, 2013.MA Xiao-long. Lane detection and recognition based on vision in the complex illumination condition[D]. Chengdu: University of Electronic Science and Technology of China, 2013. (in Chinese). [12] CANNY J. A computational approach to edge detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1986, 8(6): 679-698. [13] VALA M H J, BAXI P A. A review on Otsu image segmentation algorithm[J]. International Journal of Advanced Research in Computer Engineering and Technology, 2013, 2(2): 387-389. [14] WANG J G, LIN C J, CHEN S M. Applying fuzzy method to vision-based lane detection and departure warning system[J]. Expert Systems with Applications, 2010, 37(1): 113-126. doi: 10.1016/j.eswa.2009.05.026 [15] 余天洪, 王荣本, 郭烈, 等. 不同光照条件下直线型车道标识识别方法研究[J]. 汽车工程, 2005, 27(5): 510-513, 569. doi: 10.3321/j.issn:1000-680X.2005.05.002YU Tian-hong, WANG Rong-ben, GUO Lie, et al. A study on recognition methods of linear lane markings in different illumination conditions[J]. Automotive Engineering, 2005, 27(5): 510-513, 569. (in Chinese). doi: 10.3321/j.issn:1000-680X.2005.05.002 [16] BERTOZZI M, BROGGI A. GOLD: aparallel real-time stereo vision system for generic obstacle and lane detection[J]. IEEE Transactions on Image Processing, 1998, 7(1): 62-81. doi: 10.1109/83.650851 [17] ALY M. Real time detection of lane markers in urban streets[C]//IEEE. Proceedings of the 2008 IEEE Intelligent Vehicles Symposium. New York: IEEE, 2008: 7-12. [18] 李明, 黄华, 夏建刚. 基于Hough变换的车道检测改进算法研究[J]. 计算机工程与设计, 2012, 33(4): 1638-1642. doi: 10.3969/j.issn.1000-7024.2012.04.075LI Ming, HUANG Hua, XIA Jian-gang. Research of robust lane detection algorithm based on Hough transform[J]. Computer Engineering and Design, 2012, 33(4): 1638-1642. (in Chinese). doi: 10.3969/j.issn.1000-7024.2012.04.075 [19] 宋晓静. 基于Hough变换目标检测问题研究[D]. 秦皇岛: 燕山大学, 2014.SONG Xiao-jing. Object detection based on Hough transform[D]. Qinhuangdao: Yanshan University, 2014. (in Chinese). [20] KAINIELI A, MEISELS A, FISHER L, et al. Automatic extraction and evaluation of geological linear features from digital remote sensing data using a Hough transform[J]. Photogrammetric Engineering and Remote Sensing, 1996, 62(5): 525-531. [21] PALMER P L, KITTLER J, PETROU M. An optimizing line finder using a Hough transform algorithm[J]. Computer Vision and Image Understanding, 1997, 67(1): 1-23. [22] WAN E A, VAN DER MENVE R. The unscented Kalman filter for nonlinear estimation[C]//IEEE. IEEE Adaptive Systems for Signal Processing, Communications, and Control Symposium. New York: IEEE, 2000: 153-158. [23] EVENSEN G. The ensemble Kalman filter: theoretical formulation and practical implementation[J]. Ocean Dynamics, 2003, 53(4): 343-367. doi: 10.1007/s10236-003-0036-9 [24] FRANKE U, LOOSE H, KNÖPPEL C. Lane recognition on country roads[C]//IEEE. Proceedings of the 2007 IEEE Intelligent Vehicles Symposium. New York: IEEE, 2007: 99-104. [25] WATANABE A, NAITO T, NINOMIYA Y. Lane detection with roadside structure using on-board monocular camera[C]//IEEE. Proceedings of the 2009 IEEE Intelligent Vehicles Symposium. New York: IEEE, 2009: 191-196. [26] 夏楠, 邱天爽, 李景春, 等. 一种卡尔曼滤波与粒子滤波相结合的非线性滤波算法[J]. 电子学报, 2013, 41(1): 148-152. https://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201301027.htmXIA Nan, QIU Tian-shuang, LI Jing-chun, et al. A nonlinear filtering algorithm combining the Kalman filter and the particle filter[J]. Acta Electronica Sinica, 2013, 41(1): 148-152. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201301027.htm [27] 李从宇, 王宝光. 嵌入式DSP系统C语言硬件编程技术[J]. 测控技术, 2007, 26(4): 68-70. https://www.cnki.com.cn/Article/CJFDTOTAL-IKJS200704023.htmLI Cong-yu, WANG Bao-guang. Techniques of C language hardware programming in embedded DSP system[J]. Measurement and Control Technology, 2007, 26(4): 68-70. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-IKJS200704023.htm -

 下载:
下载:


 点击查看大图
点击查看大图
图(9) / 表(1)
计量
- 文章访问数: 628
- HTML全文浏览量: 101
- PDF下载量: 989
- 被引次数: 0
