

Vibration control of EMU car body based on secondary vertical actuators and piezoelectric actuators
Article Text (Baidu Translation)
-
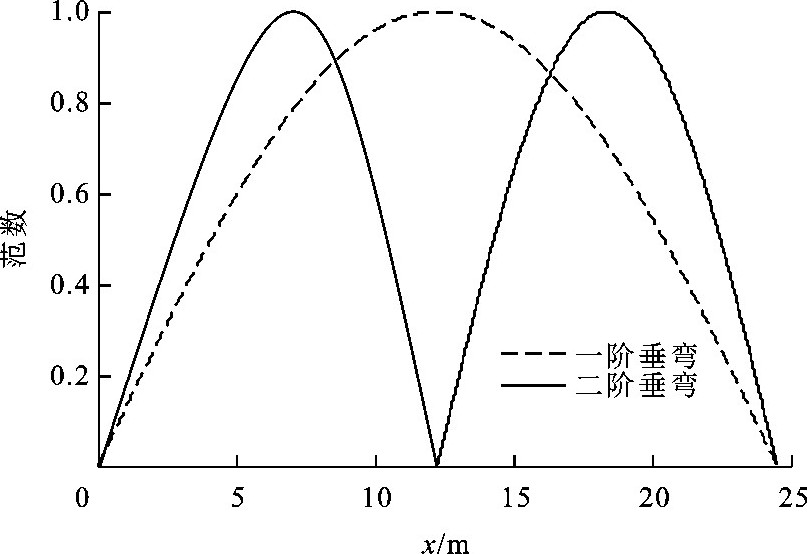
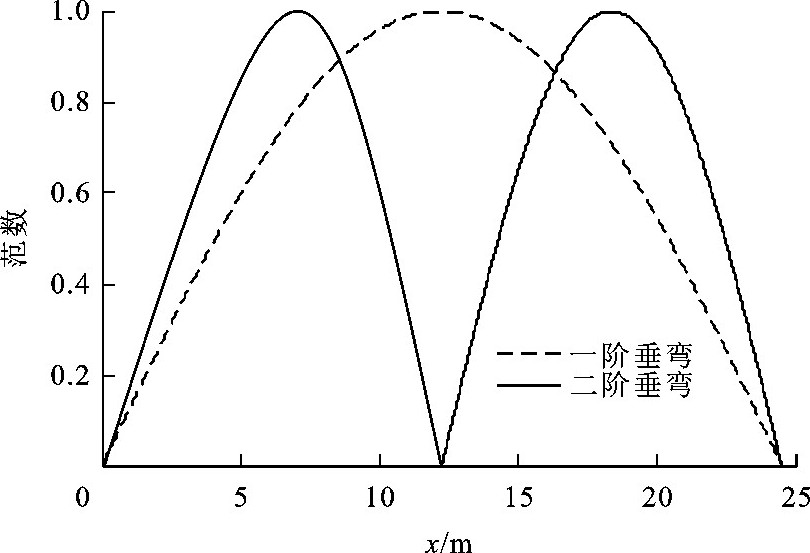
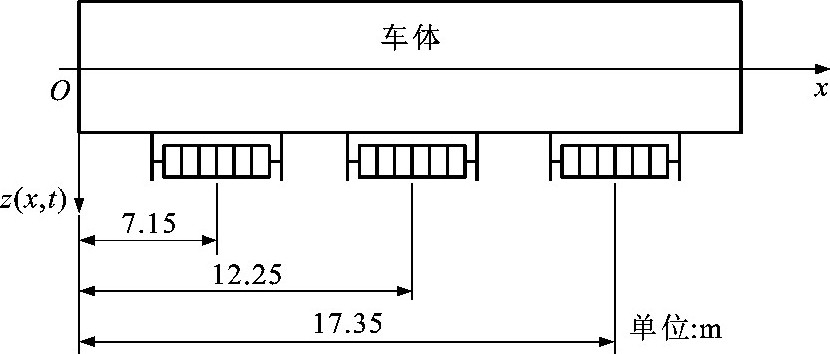
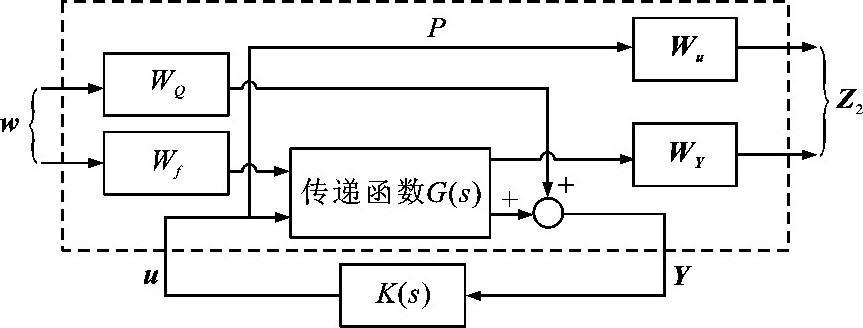
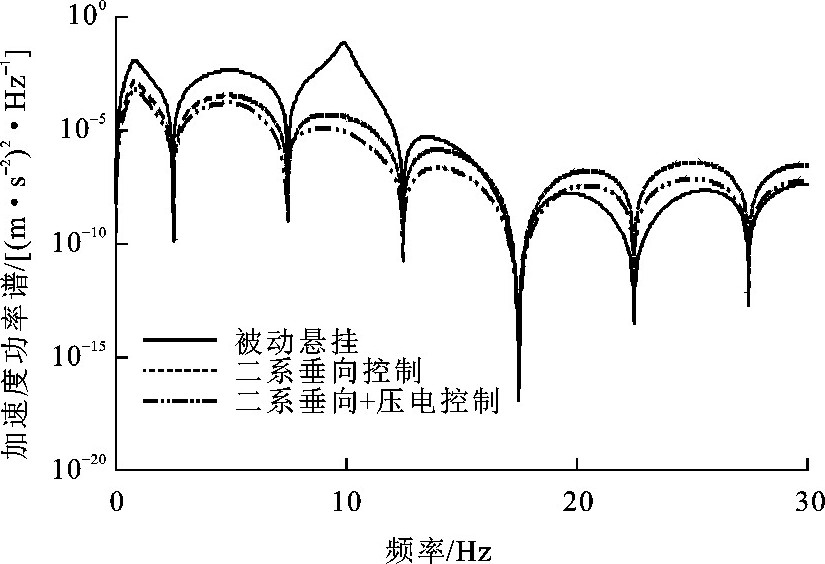
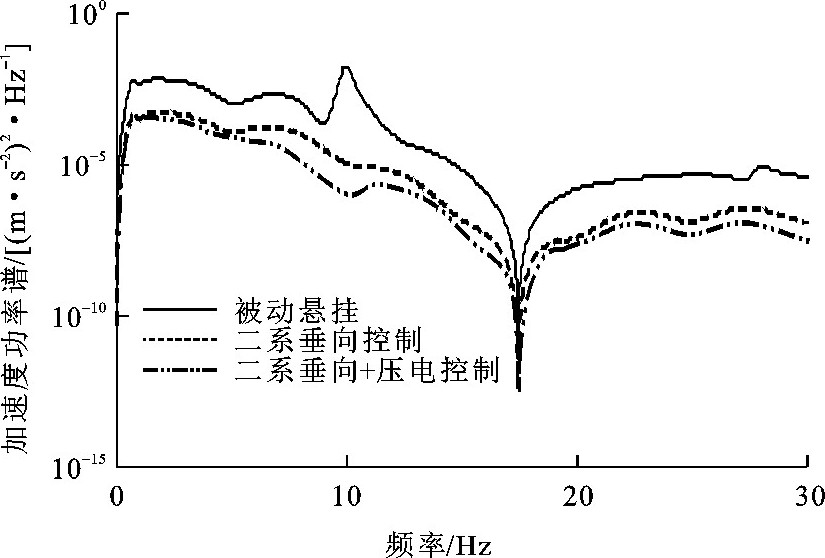
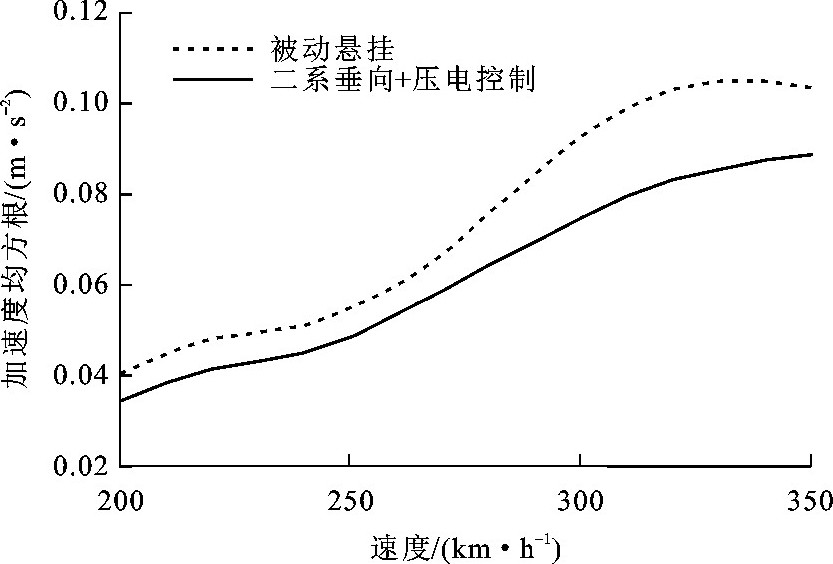
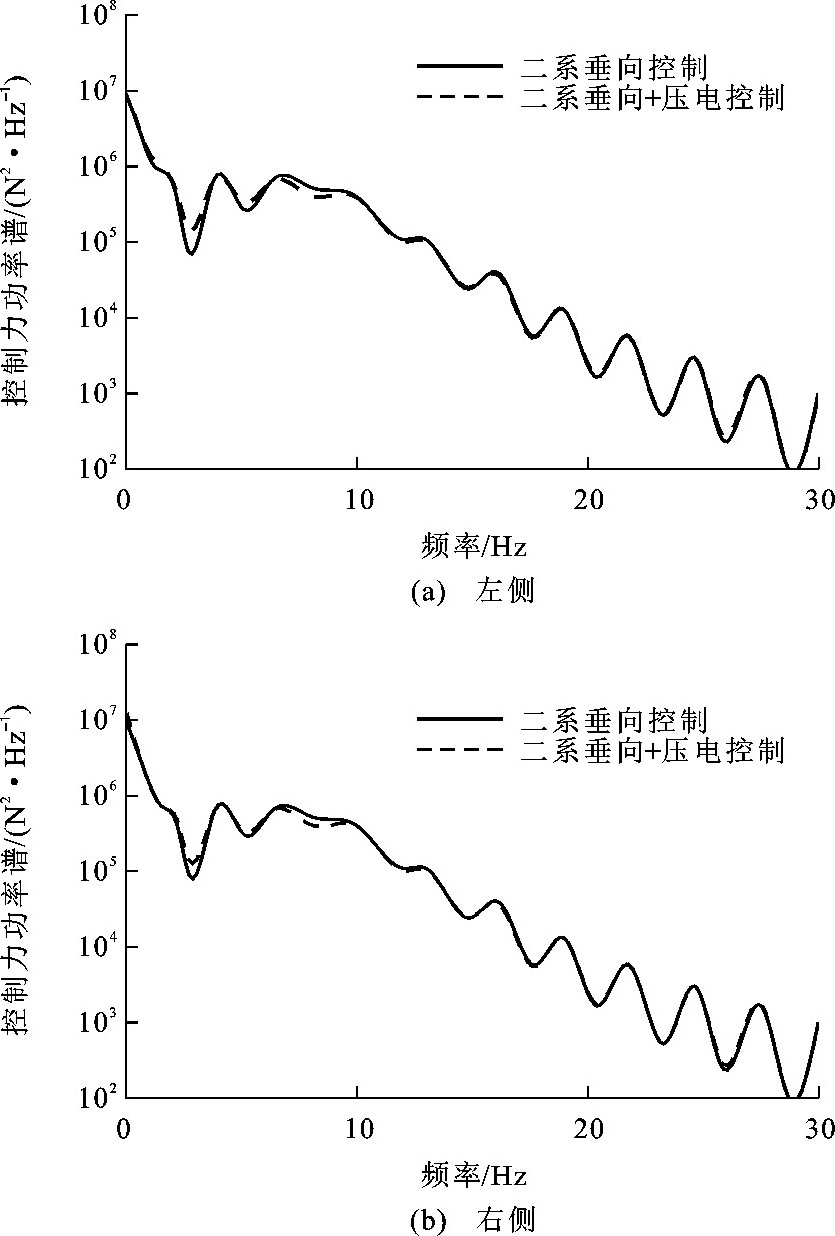
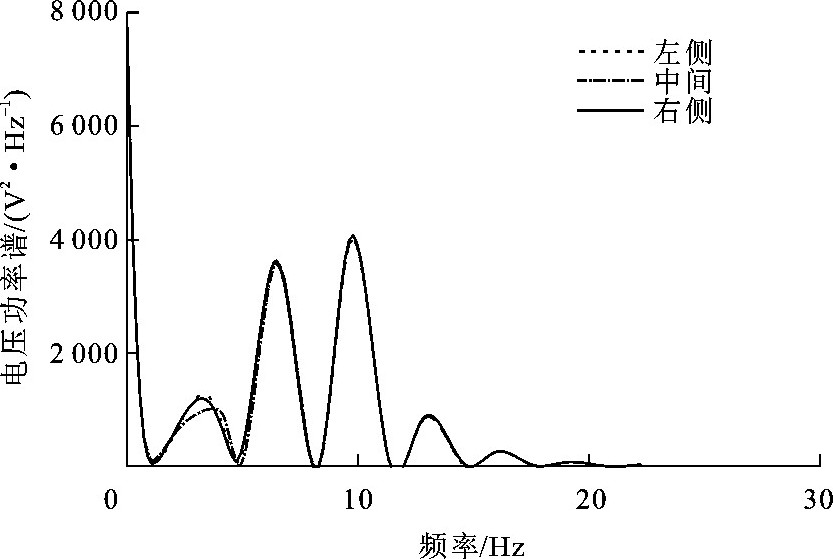
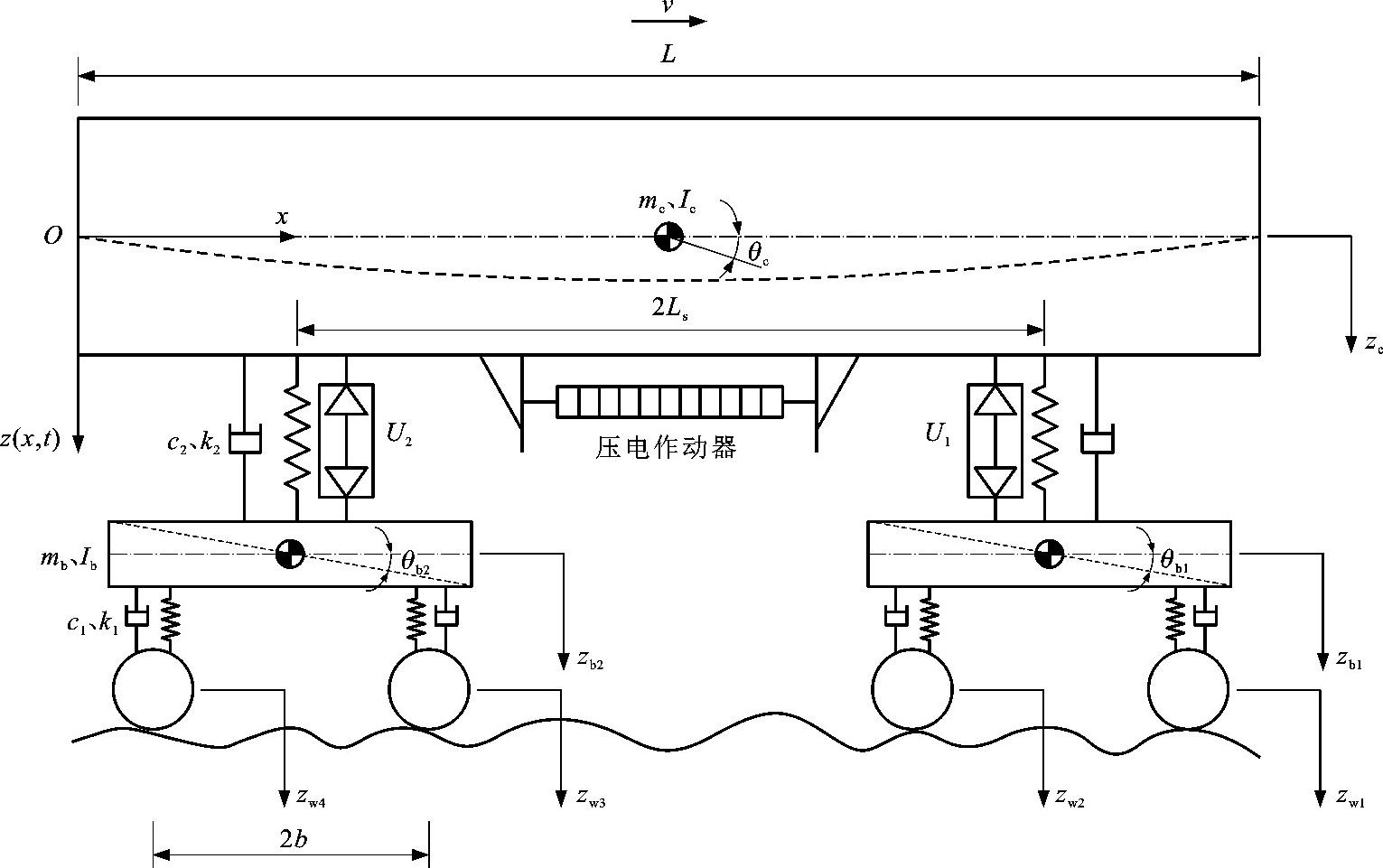
摘要: 为了减小高速动车组车体刚性与弹性振动, 提出了一种基于二系垂向作动器与车体压电作动器的高速动车组车体振动主动控制方法; 基于某型高速动车组, 设计了一种在车辆二系安装垂向作动器, 在车体底架布置压电作动器, 运用H∞鲁棒最优控制器进行车辆协调控制的主动减振方法; 建立了基于车辆动力学参数的刚柔耦合减振力学模型, 采用H2及H∞准则优化压电作动器与压电传感器布置位置, 运用鲁棒最优控制方法设计了H∞反馈控制器; 利用MATLAB仿真了减振装置与主动控制方法对车辆动力学性能的影响, 比较了被动悬挂车辆、仅安装二系垂向作动器车辆与采用主动控制车辆的动力学性能差异。研究结果表明: 压电作动器与压电传感器布置在距车体左端距离为7.15、12.25、17.35m处车体一阶及二阶弹性模态归一化H2及H∞范数最大, 可以作为压电作动器与传感器的布置位置; 基于二系垂向作动器与车体压电作动器的鲁棒最优控制方法能够有效地抑制车体的振动, 一阶垂弯振动频率处车体中部和转向架上方的加速度功率谱分别减小为被动悬挂车辆的5%、10%;速度越大, 振动加速度抑制效果越明显, 当车辆的运行速度为200km·h-1时, 车体振动加速度均方根减小10%, 当车辆的运行速度为350km·h-1时, 车体振动加速度均方根减小18%;相对于被动悬挂, 二系垂向作动器输出力功率谱在车体浮沉与点头振动频率处的量级为106 N2·Hz-1, 对车体刚性振动有较大抑制作用, 压电作动器电压功率谱在车体一阶垂弯振动频率处达到峰值4 000V2·Hz-1, 对车体弹性振动有较大抑制作用。Abstract: To reduce the rigid and elastic vibration of car body of high-speed electric multiple units (EMU), the active vibration control method was proposed based on secondary vertical actuators and car body piezoelectric actuators. Based on a certain type of high-speed EMU, an active reducing method of vibration was designed in which vertical actuators were installed in thesecondary suspension, piezoelectric actuators were arranged in the under-frame of the car body, and an H∞ robust optimal controller was used to coordinate the vehicle control. A mechanics model of rigid-flexible coupled vibration reduction based on vehicle dynamics parameters was established. The placement positions of the piezoelectric actuators and sensors were optimized by using the H2 and H∞ norms. The H∞ feedback controller was designed by robust optimal control method. The effect of vibration damper and active control method on vehicle dynamic performance was simulated by MATLAB. The dynamic performance differences between passive suspension vehicle, secondary vertical actuators vehicle and active control vehicle were compared. Analysis results show that when the piezoelectric actuators and the piezoelectric sensors are arranged at the distances of 7.15, 12.25, and 17.35 mfrom the left end of the car body, the normalized H2 and H∞ norms of the first and second-order elastic modes of the car body are the largest, and can be used as the placement positions of piezoelectric actuators and sensors. The robust optimal control method based on the secondary vertical actuators and car body piezoelectric actuators can effectively suppress vibration of the car body, and the acceleration power spectrums of the first order vertical bending vibration frequency on the car body centre and above the bogie reduce by 5% and 10% of passive suspension vehicle, respectively. With higher velocity, the vibration acceleration suppression effect is more obvious. When vehicle's speed is 200 and 350 km·h-1, its mean square root of vibration acceleration decreases by 10% and 18%, respectively. Compared with the passive suspension, the magnitudes of output force power spectrums of the secondary vertical actuators are 106 N2·Hz-1 at the bounce and pitch vibration frequencies of the car body. Thus, the secondary vertical actuators can greatly suppress the rigid vibration of the car body. The voltage power spectrums of the piezoelectric actuators reach a peak of 4 000 V2·Hz-1 at the first order vertical bending vibration frequency of the car body, which greatly suppresses the elastic vibration of the car body.
-

图 9 二系垂向作动器控制力功率谱
Figure 9. Control force power spectrums of secondary vertical actuators

图 10 压电作动器输出电压功率谱
Figure 10. Output voltage power spectrums of piezoelectric actuators
-
[1] SHI Huai-long, WU Ping-bo. Flexible vibration analysis for car body of high-speed EMU[J]. Journal of Mechanical Science and Technology, 2016, 30 (1): 55-66. doi: 10.1007/s12206-015-1207-6 [2] LING Liang, ZHANG Qing, XIAO Xin-biao, et al. Integration of car-body flexibility into train-track coupling system dynamics analysis[J]. Vehicle System Dynamics, 2018, 56 (4): 485-505. doi: 10.1080/00423114.2017.1391397 [3] DUMITRIU M. A new passive approach to reducing the carbody vertical bending vibration of railway vehicles[J]. Vehicle System Dynamics, 2017, 55 (11): 1787-1806. doi: 10.1080/00423114.2017.1330962 [4] GONG Dao, ZHOU Jin-song, SUN Wen-jing. Influence of under-chassis-suspended equipment on high-speed EMU trains and the design of suspension parameters[J]. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, 2016, 230 (8): 1790-1802. doi: 10.1177/0954409715614601 [5] 黄彩虹, 曾京. 基于约束阻尼层的高速客车车体弯曲振动的抑制[J]. 交通运输工程学报, 2010, 10 (1): 36-42. doi: 10.3969/j.issn.1671-1637.2010.01.007HUANG Cai-hong, ZENG Jing. Flexural vibration suppression of car body for high-speed passenger car based on constrained damping layers[J]. Journal of Traffic and Transportation Engineering, 2010, 10 (1): 36-42. (in Chinese). doi: 10.3969/j.issn.1671-1637.2010.01.007 [6] SUZUKI Y, MAEBASHI E, AKUTSU K, et al. Method for flexural vibration damping of rolling stock carbody[J]. Quarterly Report of Railway Technical Research Institute, 1997, 38 (3): 123-128. [7] SCHANDL G, LUGNER P, BENATZKY C, et al. Comfort enhancement by an active vibration reduction system for a flexible railway car body[J]. Vehicle System Dynamics, 2007, 45 (9): 835-847. doi: 10.1080/00423110601145952 [8] KOZEK M, BENATZKY C, SCHIRRER A, et al. Vibration damping of a flexible car body structure using piezo-stack actuators[J]. Control Engineering Practice, 2011, 19 (3): 298-310. doi: 10.1016/j.conengprac.2009.08.001 [9] FOO E, GOODALL R M. Active suspension control of flexiblebodied railway vehicles using electro-hydraulic and electromagnetic actuators[J]. Control Engineering Practice, 2000, 8 (5): 507-518. doi: 10.1016/S0967-0661(99)00188-4 [10] SUGAHARA Y, KAZATO A, KOGANEI R, et al. Suppression of vertical bending and rigid-body-mode vibration in railway vehicle car body by primary and secondary suspension control: results of simulations and running tests using Shinkansen vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, 2009, 223 (6): 517-531. doi: 10.1243/09544097JRRT265 [11] SUGAHARA Y, KAZATO A, TAKIGAMI T, et al. Suppression of vertical vibration in railway vehicles by controlling the damping force of primary and secondary suspensions[J]. Quarterly Report of Railway Technical Research Institute, 2008, 49 (1): 7-15. [12] SUZUKI Y, AKUTSU K. Theoretical analysis of flexural vibration of car body[J]. Quarterly Report of Railway Technical Research Institute, 1990, 31 (1): 42-48. [13] DIANA G, CHELI F, COLLINA A, et al. The development of a numerical model for railway vehicles comfort assessment through comparison with experimental measurements[J]. Vehicle System Dynamics, 2002, 38 (3): 165-183. doi: 10.1076/vesd.38.3.165.8287 [14] 曹辉, 张卫华, 缪炳荣. 车体弹性效应下的垂向振动特性研究[J]. 铁道学报, 2017, 39 (6): 48-54. doi: 10.3969/j.issn.1001-8360.2017.06.006CAO Hui, ZHANG Wei-hua, MIAO Bing-rong. Research on vertical vibration characteristic of car body under flexible effect[J]. Journal of the China Railway Society, 2017, 39 (6): 48-54. (in Chinese). doi: 10.3969/j.issn.1001-8360.2017.06.006 [15] KAMADA T, KIUCHI R, NAGAI M. Suppression of railway vehicle vibration by shunt damping using stack type piezoelectric transducers[J]. Vehicle System Dynamics, 2008, 46 (S): 561-570. [16] TAKIGAMI T, TOMIOKA T. Investigation to suppress bending vibration of railway vehicle carbodies using piezoelectric elements[J]. Quarterly Report of Railway Technical Research Institute, 2005, 46 (4): 225-230. [17] MOHEIMANI S O R. A survey of recent innovations in vibration damping and control using shunted piezoelectric transducers[J]. IEEE Transactions on Control Systems Technology, 2003, 11 (4): 482-494. doi: 10.1109/TCST.2003.813371 [18] TAKIGAMI T, TOMIOKA T, HANSSON J. Vibration suppression of railway vehicle carbody with piezoelectric elements (a study by using a scale model of Shinkansen)[J]. Japan Society of Mechanical Engineers, 2005, 71 (4): 1254-1262. [19] MOLATEFI H, AYOUBI P, MOZAFARI H. Active vibration control of a railway vehicle carbody using piezoelectric elements[J]. Chinese Journal of Mechanical Engineering, 2017, 30 (4): 363-972. [20] HALIM D, MOHEIMANI S O R. Spatial resonant control of flexible structures—application to a piezoelectric laminate beam[J]. IEEE Transactions on Control Systems Technology, 2001, 9 (1): 37-53. doi: 10.1109/87.896744 [21] HALIM D, MOHEIMANI S O R. Spatial H2control of a piezoelectric laminate beam: experimental implementation[J]. IEEE Transactions on Control Systems Technology, 2002, 10 (4): 533-546. doi: 10.1109/TCST.2002.1014673 [22] KAMADA T, HIRAIZUMI K, NAGAI M. Active vibration suppression of lightweight railway vehicle body by combined use of piezoelectric actuators and linear actuators[J]. Vehicle System Dynamics, 2010, 48 (S): 73-87. [23] ORVNS A, STICHEL S, PERSSON R. Active lateral secondary suspension with H∞control to improve ride comfort: simulations on a full-scale model[J]. Vehicle System Dynamics, 2011, 49 (9): 1409-1422. doi: 10.1080/00423114.2010.527011 [24] MOUSAVI BIDELEH S M, MEI T X, BERBYUK V. Robust control and actuator dynamics compensation for railway vehicles[J]. Vehicle System Dynamics, 2016, 54 (12): 1762-1784. doi: 10.1080/00423114.2016.1234627 [25] 曾京, 邬平波, 郝建华. 铁道客车系统的垂向减振分析[J]. 中国铁道科学, 2006, 27 (3): 62-67. doi: 10.3321/j.issn:1001-4632.2006.03.011ZENG Jing, WU Ping-bo, HAO jian-hua. Analysis of vertical vibration reduction for railway vehicle systems[J]. China Railway Science, 2006, 27 (3): 62-67. (in Chinese). doi: 10.3321/j.issn:1001-4632.2006.03.011 [26] 黄彩虹, 曾京, 邬平波, 等. 铁道客车车体弹性振动减振研究[J]. 工程力学, 2010, 27 (12): 250-256. https://www.cnki.com.cn/Article/CJFDTOTAL-GCLX201012041.htmHUANG Cai-hong, ZENG Jing, WU Ping-bo, et al. Study on car body flexible vibration reduction for railway passenger carriage[J]. Engineering Mechanics, 2010, 27 (12): 250-256. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GCLX201012041.htm [27] 曾京, 罗仁. 考虑车体弹性效应的铁道客车系统振动分析[J]. 铁道学报, 2007, 29 (6): 19-25. doi: 10.3321/j.issn:1001-8360.2007.06.004ZENG Jing, LUO Ren. Vibration analysis of railway passenger car systems by considering flexible carbody effect[J]. Journal of the China Railway Society, 2007, 29 (6): 19-25. (in Chinese). doi: 10.3321/j.issn:1001-8360.2007.06.004 -

 下载:
下载:



 点击查看大图
点击查看大图
图(10) / 表(3)
计量
- 文章访问数: 682
- HTML全文浏览量: 189
- PDF下载量: 316
- 被引次数: 0
