

Pre-warning system of maritime traffic safety risk in restricted visibility weather
-
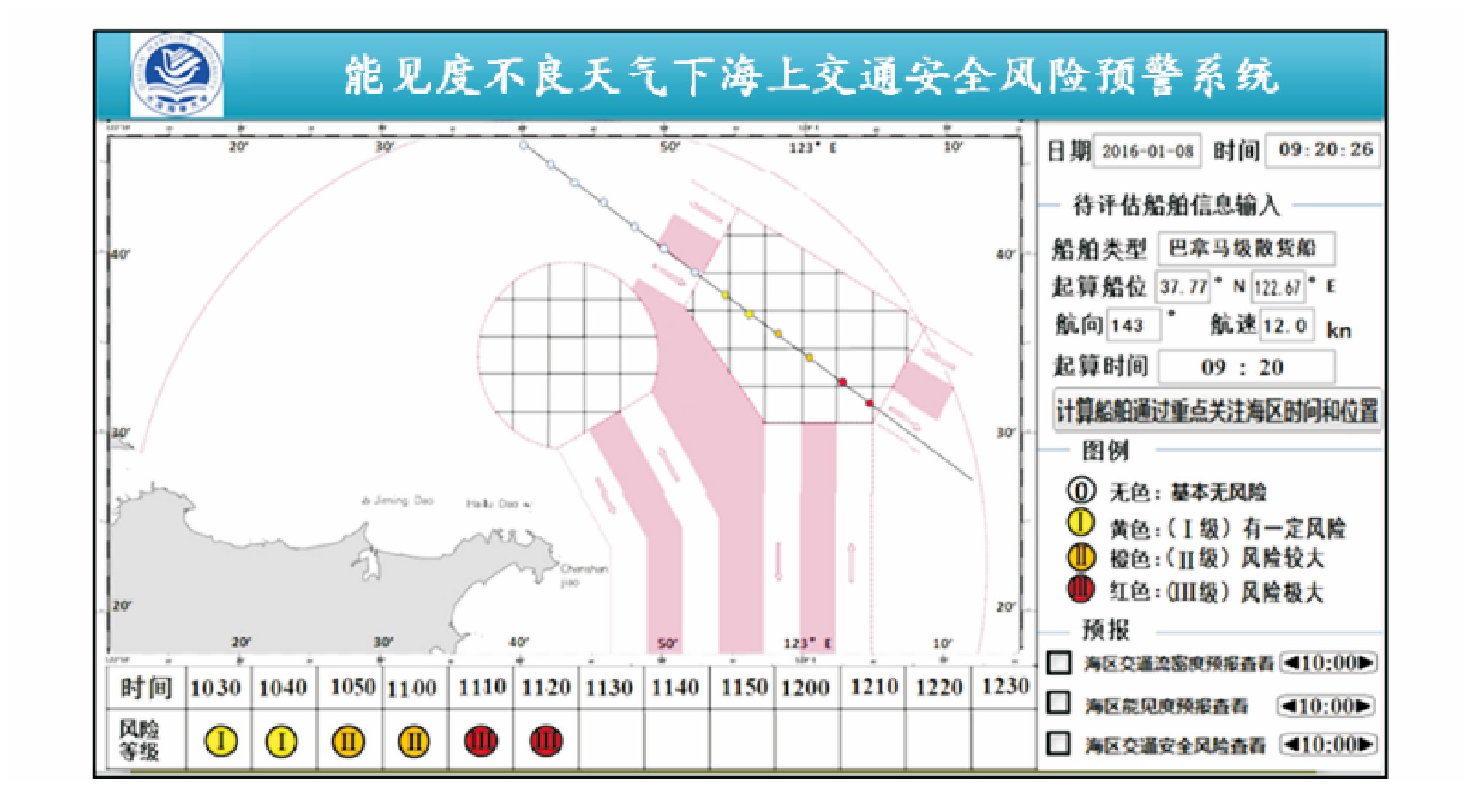
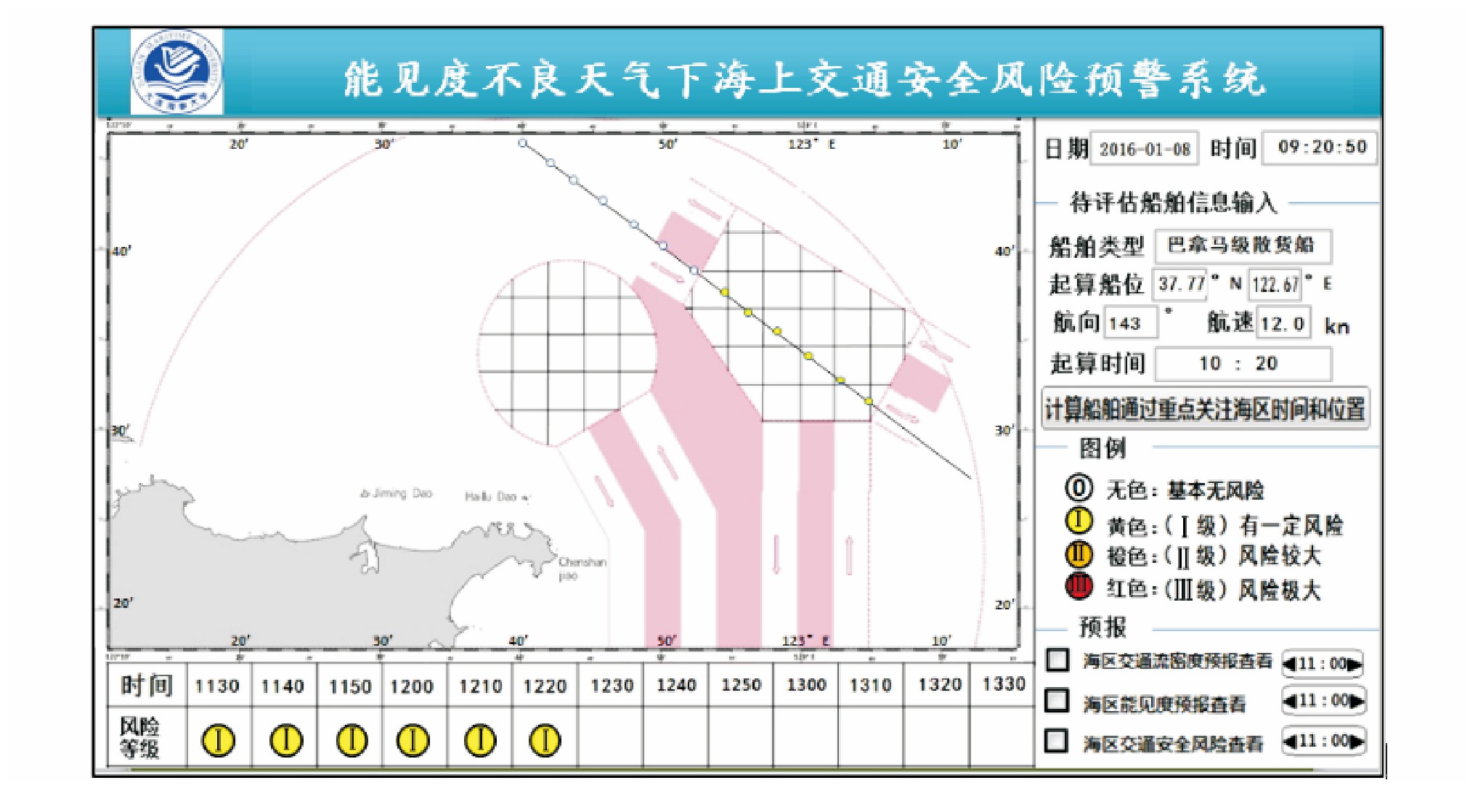
摘要: 为了提高海上交通安全风险预警的实用性与精度, 建立了能见度不良天气下海上交通风险预警系统, 由风险矩阵知识库、交通流密度预测子系统与能见度预警子系统组成; 通过采集大样本, 运用不完备信息条件下模糊信息分配理论修正了专家调查法, 确定了海上交通风险矩阵; 采用人工神经网络中极限学习机理论的短时船舶交通流密度预测算法计算了交通流密度; 采用区域大气模式系统对气象和海洋预报部门提供的能见度预报数据进行空间和时间精细网格化划分, 计算了能见距离; 采用系统预测了空间网格为2nmile×2nmile和时间步长为10min的关注海域的能见距离和交通流密度, 以验证系统的有效性。仿真结果表明: 2个不同时间段12个时间点的能见距离预测准确率分别达到75%、75%、80%、75%、80%、75%和75%、75%、80%、80%、80%、75%, 相应的交通流密度预测准确率全部达到80%, 预测结果可靠, 并且, 实现了能见度不良天气下海域航行风险的可视化与智能化监控。Abstract: To enhance the pre-warning applicability and accuracy of maritime traffic safety risk, a pre-warning system in restricted visibility weather of the risk was set up, and it was composed of the risk matrix knowledge base, traffic flow density prediction subsystem and visibility warning subsystem.By collecting large samples, the expert survey method was modified by using the fuzzy information distribution theory under the condition of incomplete information, and the maritime traffic risk matrix was determined.The traffic density was calculated by using the short-time prediction algorithm of traffic density based on the limit learning machine theory in the artificial neural network.The regional atmospheric model system was used to divide the visibility forecast data provided by the meteorological and marine forecasting departments into spatialtemporal fine meshes, and the visible distance was calculated.The system was used to predict the visibility distance and traffic flow density of the focused sea area with spatial grids of 2 nmile by2 nmile and time step of 10 min, so as to verify the effectiveness of the system.Simulation resultshows that at 12 time points in two different time periods, the prediction accuracy rates of visible distance are 75%, 75%, 80%, 75%, 80%, 75%, 75%, 75%, 80%, 80%, 80%and 75%.The prediction accuracy rates of corresponding traffic flow densities are up to 80%.Therefore, the forecast result is reliable, and the system can realize the visualization and intelligent monitoring of navigation risk in sea area in restricted visibility weather.
-

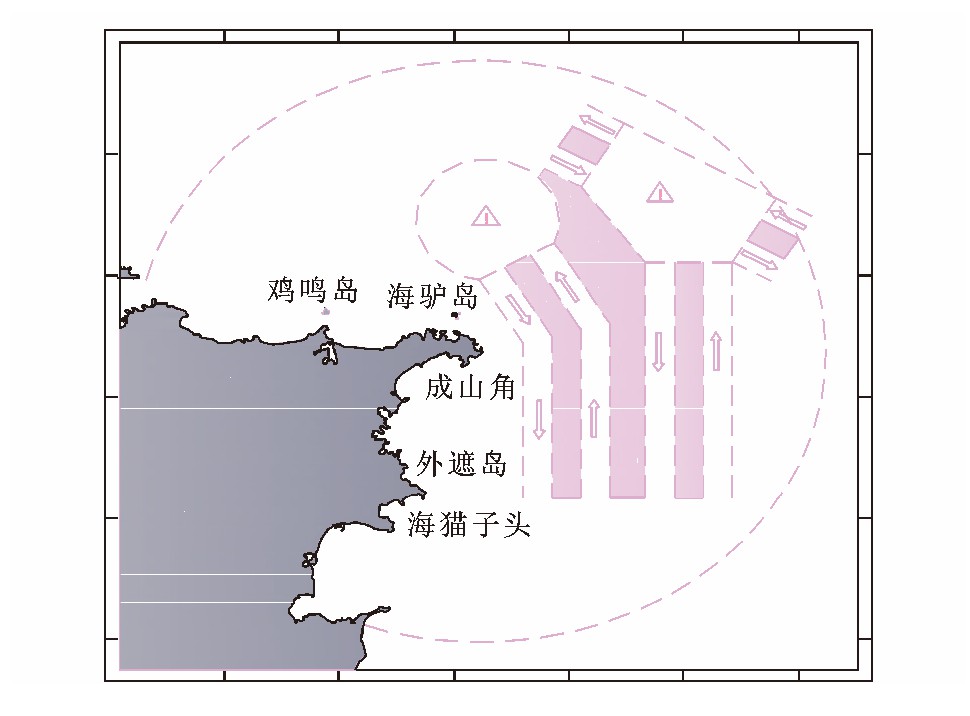
图 2 成山角分道通航进出口位置
Figure 2. Entrance and exit location of Chengshanjiao traffic separation

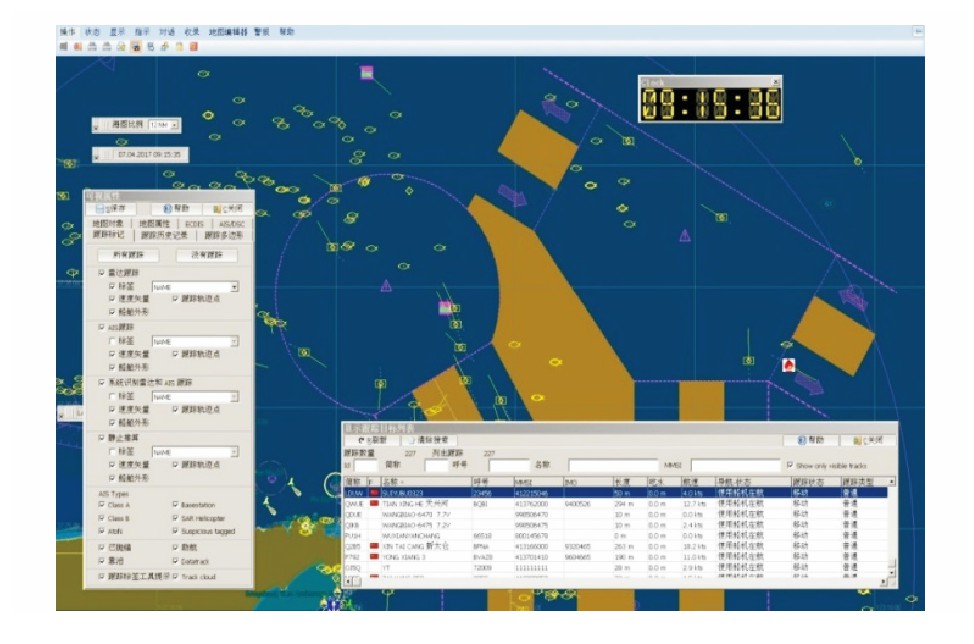
图 3 威海海事局VTS管理平台界面
Figure 3. Interface of Weihai Maritime Safety Administration VTS management platform

图 4 自编的船舶信息自动读取程序软件显示面板
Figure 4. Display panel of self-compiled ship information automatic reading program software

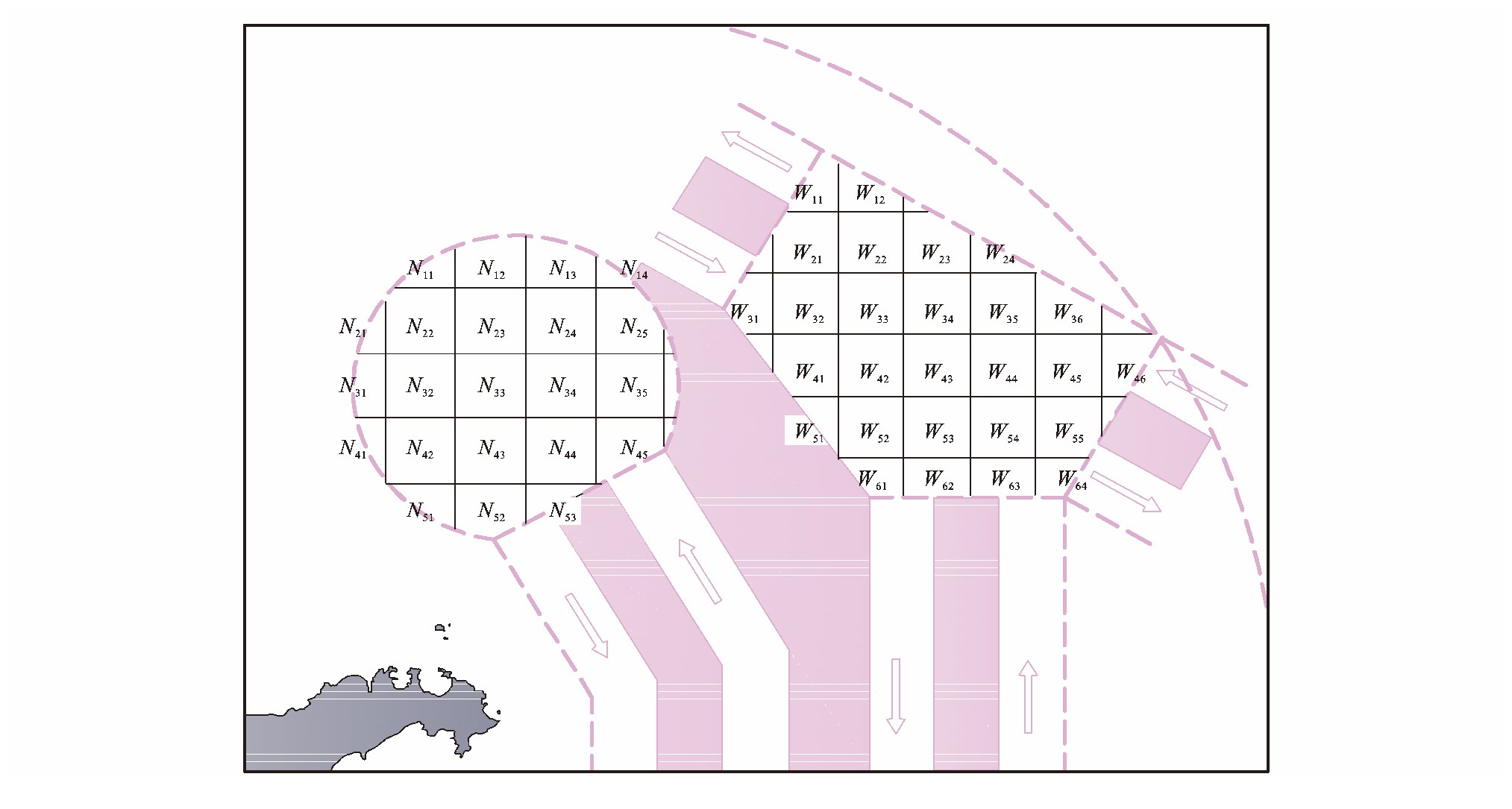
图 6 成山角海域内外警戒区网格划分编号
Figure 6. Grid partition numbers of Chengshanjiao internal and external sea alert areas
表 6 调整通过时间后的实例数据和计算结果
Table 6. Example data and calculation results after adjusting passing times

 下载: 导出CSV
下载: 导出CSV
-
[1] GOERLANDT F, KUJALA P. Traffic simulation based ship collision probability modeling[J]. Reliability Engineering and System Safety, 2011, 96 (1): 91-107. doi: 10.1016/j.ress.2010.09.003 [2] LI Wei-feng, MEI Bin, SHI Guo-you. Automatic recognition of marine traffic flow regions based on kernel density estimation[J]. Journal of Marine Science and Technology, 2018, 26 (1): 84-91. [3] 周葵, 吴伟, 姚文静, 等. 雾天高速公路交通风险评估[J]. 交通科学与工程, 2015, 31 (1): 79-84. https://www.cnki.com.cn/Article/CJFDTOTAL-CSJX201501014.htmZHOU Kui, WU Wei, YAO Wen-jing, et al. Highway traffic safety assessment in foggy weather[J]. Journal of Transport Science and Engineering, 2015, 31 (1): 79-84. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-CSJX201501014.htm [4] 刘大刚, 吴彬贵, 解以扬, 等. 海事气象保障服务现状及发展趋势[J]. 中国航海, 2014, 37 (1): 131-135. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGHH201401030.htmLIU Da-gang, WU Bin-gui, XIE Yi-yang, et al. Present state and development trend of maritime meteorological support service[J]. Navigation of China, 2014, 37 (1): 131-135. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGHH201401030.htm [5] LIU Dong-dong, SHI Guo-you, LI Wei-feng. Decision support based on optimal collision avoidance path and collision risk[C]//IEEE. IEEE 2018 3rd International Conference on Intelligent Transportation Engineering. New York: IEEE, 2018: 164-169. [6] LI Wei-feng, MA Wen-yao, YANG Jia-xuan, et al. The assessment of risk of collision between two ships avoiding collision by altering course[C]//Springer. International Conference on Algorithms and Architectures for Parallel Processing. Berlin: Springer, 2014: 507-515. [7] YIP T L. Port traffic risks-a study of accidents in Hong Kong waters[J]. Transportation Research Part E: Logistics and Transportation Review, 2008, 44 (5): 921-931. doi: 10.1016/j.tre.2006.09.002 [8] CELIK M, LAVASANI S M, WANG Jin. A risk-based modelling approach to enhance shipping accident investigation[J]. Safety Science, 2010, 48 (1): 18-27. doi: 10.1016/j.ssci.2009.04.007 [9] TRUCCO P, CAGNO E, RUGGERI F, et al. A Bayesian belief network modelling of organisational factors in risk analysis: a case study in maritime transportation[J]. Reliability Engineering and System Safety, 2008, 93 (6): 845-856. doi: 10.1016/j.ress.2007.03.035 [10] ÖZBAS B, OR I. Analysis and control of maritime transit traffic through the Istanbul Channel: a simulation approach[J]. Central European Journal of Operations Research, 2007, 15 (3): 235-252. doi: 10.1007/s10100-007-0028-9 [11] SZWED P S. Risk factors and theory building: a study to improve passenger vessel safety[J]. WMU Journal of Maritime Affairs, 2011, 10: 183-208. doi: 10.1007/s13437-011-0010-1 [12] 解以扬, 刘大刚, 吴丹朱, 等. 黄、渤海恶劣天气影响船舶安全的风险预估技术初探[J]. 灾害学, 2014, 29 (1): 136-143. https://www.cnki.com.cn/Article/CJFDTOTAL-ZHXU201401025.htmXIE Yi-yang, LIU Da-gang, WU Dan-zhu, et al. Risk prediction technology of ship safety in the Yellow Sea and Bohai Sea during severe weather[J]. Journal of Catastrophology, 2014, 29 (1): 136-143. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZHXU201401025.htm [13] 吴金龙, 刘大刚, 范中洲, 等. 大风浪条件下渤海海区重点船舶风险评估模型[J]. 中国航海, 2012, 35 (2): 89-92. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGHH201202021.htmWU Jin-long, LIU Da-gang, FAN Zhong-zhou, et al. The risk evaluation model of major vessels in Bohai area in the condition of rough seas[J]. Navigation of China, 2012, 35 (2): 89-92. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGHH201202021.htm [14] 范中洲, 刘大刚, 刘涛, 等. 基于ECDIS的船舶-大风浪区动态显示系统[J]. 大连海事大学学报, 2012, 38 (3): 11-14. https://www.cnki.com.cn/Article/CJFDTOTAL-DLHS201203004.htmFAN Zhong-zhou, LIU Da-gang, LIU Tao, et al. Dynamic display system of vessel-rough sea area based on ECDIS[J]. Journal of Dalian Maritime University, 2012, 38 (3): 11-14. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DLHS201203004.htm [15] 吴金龙, 吴彬贵, 刘大刚, 等. 天津港锚地大风条件下锚泊船安全评估系统[J]. 大连海事大学学报, 2013, 39 (1): 49-52. https://www.cnki.com.cn/Article/CJFDTOTAL-DLHS201301012.htmWU Jin-long, WU Bin-gui, LIU Da-gang, et al. Safety evaluation system for anchored vessels in Tianjin anchorage under strong wind[J]. Journal of Dalian Maritime University, 2013, 39 (1): 49-52. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DLHS201301012.htm [16] 孙成志, 丁德文, 刘大刚. 基于安全航线的海洋水文气象保障辅助决策仿真[J]. 大连海事大学学报, 2014, 40 (2): 47-50. https://www.cnki.com.cn/Article/CJFDTOTAL-DLHS201402012.htmSUN Cheng-zhi, DING De-wen, LIU Da-gang. Auxiliary decision-making simulation based on meteorological and hydrologic information for naval navigation security[J]. Journal of Dalian Maritime University, 2014, 40 (2): 47-50. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DLHS201402012.htm [17] 刘大刚, 徐东华, 吴兆麟. 大风浪中航行船舶的危险度估算模型[J]. 交通运输工程学报, 2005, 5 (3): 83-86, 97. http://transport.chd.edu.cn/article/id/200503018LIU Da-gang, XU Dong-hua, WU Zhao-lin. Risk degree assessment model of navigating ship on heavy sea[J]. Journal of Traffic and Transportation Engineering, 2005, 5 (3): 83-86, 97. (in Chinese). http://transport.chd.edu.cn/article/id/200503018 [18] LIU Jing, HUANG Chong-fu. An information diffusion technique for fire risk analysis[J]. Journal of Donghua University: English Edition, 2004, 21 (3): 54-57. [19] BALMAT J F, LAFONT F, MAIFRET R, et al. A decisionmaking system to maritime risk assessment[J]. Ocean Engineering, 2011, 38 (1): 171-176. [20] 于海, 吴琼, 冯学梅, 等. 不同类型船舶伴流数值模拟研究[C]//吴有生, 刘烨, 刘程, 等. 第二十三届全国水动力学研讨会暨第十届全国水动力学学术会议. 北京: 海洋出版社, 2011: 594-602.YU Hai, WU Qiong, FENG Xue-mei, et al. Numerical sinlulation on viscous wake field around various ships[C]∥WU You-sheng, LIU Ye, LIU Cheng, et al. Proceedings of the 23rd National Conference on Hydrodynamics and 10th National Congress on Hydrodynamics. Beijing: China Ocean Press, 2011: 594-602. (in Chinese). [21] 黄崇福. 自然灾害动态风险分析的一个形式化模型[J]. 灾害学, 2015, 30 (3): 1-9. https://www.cnki.com.cn/Article/CJFDTOTAL-ZHXU201503001.htmHUANG Chong-fu. A formal model for dynamic risk analysis in natural disasters[J]. Journal of Catastrophology, 2015, 30 (3): 1-9. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZHXU201503001.htm [22] 熊伟晴, 燕晓波, 姜守旭, 等. 基于BP神经网络和模糊推理系统的短时交通流预测[J]. 智能计算机与应用, 2015, 5 (2): 43-46, 51. https://www.cnki.com.cn/Article/CJFDTOTAL-DLXZ201502013.htmXIONG Wei-qing, YAN Xiao-bo, JIANG Shou-xu, et al. Short-term traffic flow prediction based on BP neural network and fuzzy inference system[J]. Intelligent Computer and Applications, 2015, 5 (2): 43-46, 51. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DLXZ201502013.htm [23] 何月, 张小伟, 蔡菊珍, 等. 基于MTSAT卫星遥感监测的浙江省及周边海区大雾分布特征[J]. 气象学报, 2015, 73 (1): 200-210. https://www.cnki.com.cn/Article/CJFDTOTAL-QXXB201501015.htmHE Yue, ZHANG Xiao-wei, CAI Ju-zhen, et al. Distribution characteristics of the fog derived from the MTSAT satellite data in Zhejiang Province and its adjacent sea area[J]. Acta Meterologica Sinica, 2015, 73 (1): 200-210. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-QXXB201501015.htm [24] KUJALA P, HÄNNINEN M, AROLA T, et al. Analysis of the marine traffic safety in the Gulf of Finland[J]. Reliability Engineering and System Safety, 2009, 94 (8): 1349-1357. [25] 黄崇福. 自然灾害动态风险分析基本原理的探讨[J]. 灾害学, 2015, 30 (2): 1-7. https://www.cnki.com.cn/Article/CJFDTOTAL-ZHXU201502001.htmHUANG Chong-fu. Exploration on the basic principles of dynamic risk analysis in natural disasters[J]. Journal of Catastrophology, 2015, 30 (2): 1-7. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZHXU201502001.htm [26] HUANG Chong-fu. Multiple internet of intelligences for risk analysis[J]. Journal of Risk Analysis and Crisis Response, 2014, 4 (2): 61-71. [27] 庞西磊, 黄崇福, 张英菊. 自然灾害动态风险评估的一种基本模式[J]. 灾害学, 2016, 31 (1): 1-6.PANG Xi-lei, HUANG Chong-fu, ZHANG Ying-ju. A basic mode for dynamic risk assessment of natural disaster[J]. Journal of Catastrophology, 2016, 31 (1): 1-6. (in Chinese). [28] 黄崇福. 自然灾害动态风险分析的一个虚拟案例[J]. 灾害学, 2015, 30 (4): 1-11. https://www.cnki.com.cn/Article/CJFDTOTAL-ZHXU201504001.htmHUANG Chong-fu. A virtual case study to analyze dynamic risks of natural disasters[J]. Journal of Catastrophology, 2015, 30 (4): 1-11. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZHXU201504001.htm [29] COX L A. Confronting deep uncertainties in risk analysis[J]. Risk Analysis, 2012, 32 (10): 1607-1629. [30] ZADEH L A. The crisis of under coordination[J]. Journal of Risk Analysis and Crisis Response, 2014, 4 (2): 59-60. [31] 高邈, 史国友, 李伟峰. 改进的Sliding Window在线船舶AIS轨迹数据压缩算法[J]. 交通运输工程学报, 2018, 18 (3): 218-227. http://transport.chd.edu.cn/article/id/201803022GAO Miao, SHI Guo-you, LI Wei-feng. Online compression algorithm of AIS trajectory data based on improved sliding window[J]. Journal of Traffic and Transportation Engineering, 2018, 18 (3): 218-227. (in Chinese). http://transport.chd.edu.cn/article/id/201803022 -








 点击查看大图
点击查看大图
计量
- 文章访问数: 1094
- HTML全文浏览量: 222
- PDF下载量: 490
- 被引次数: 0
