

Slot control optimization of intelligent platoon for dual-lane two-way overtaking behavior
-
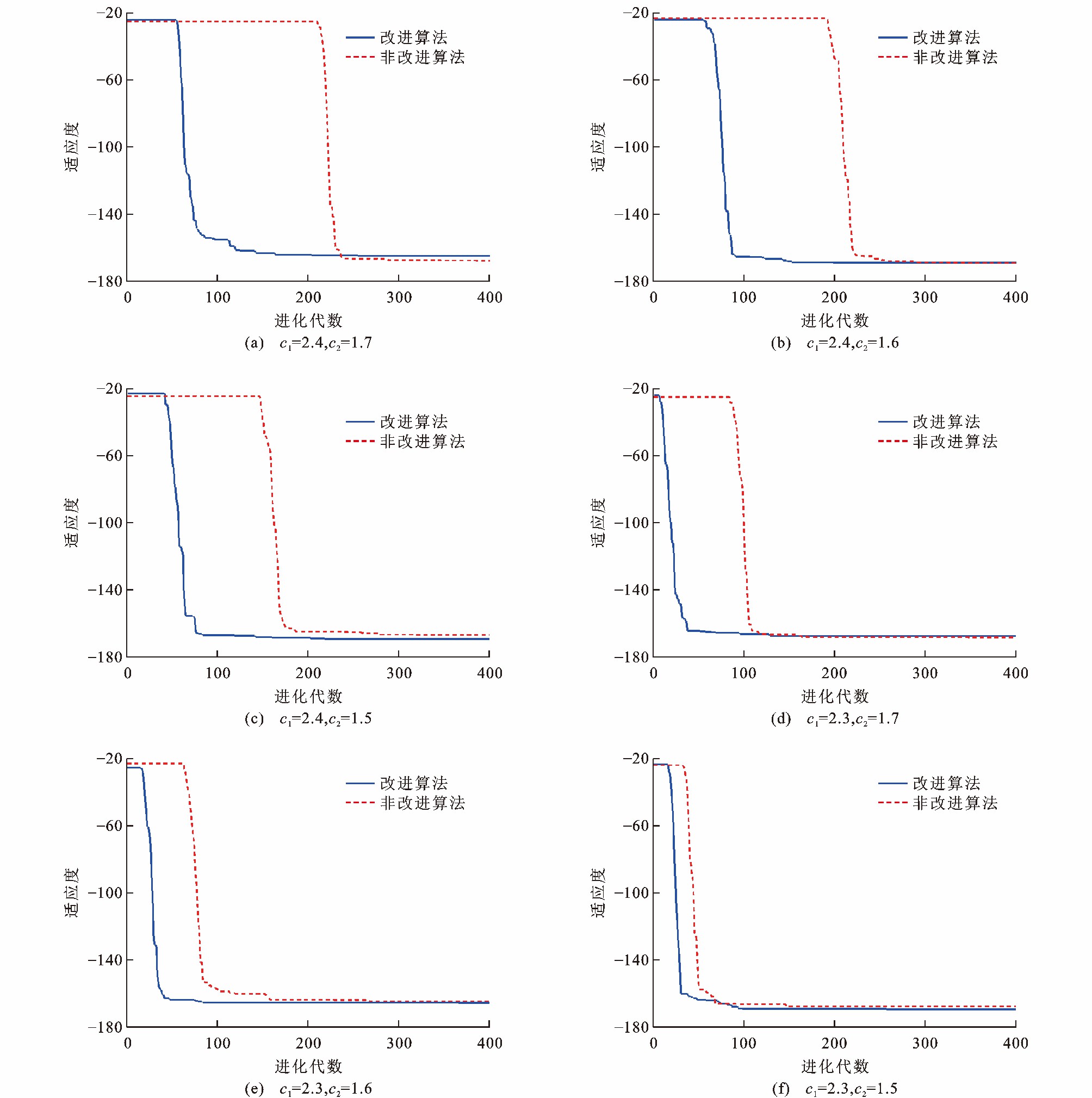
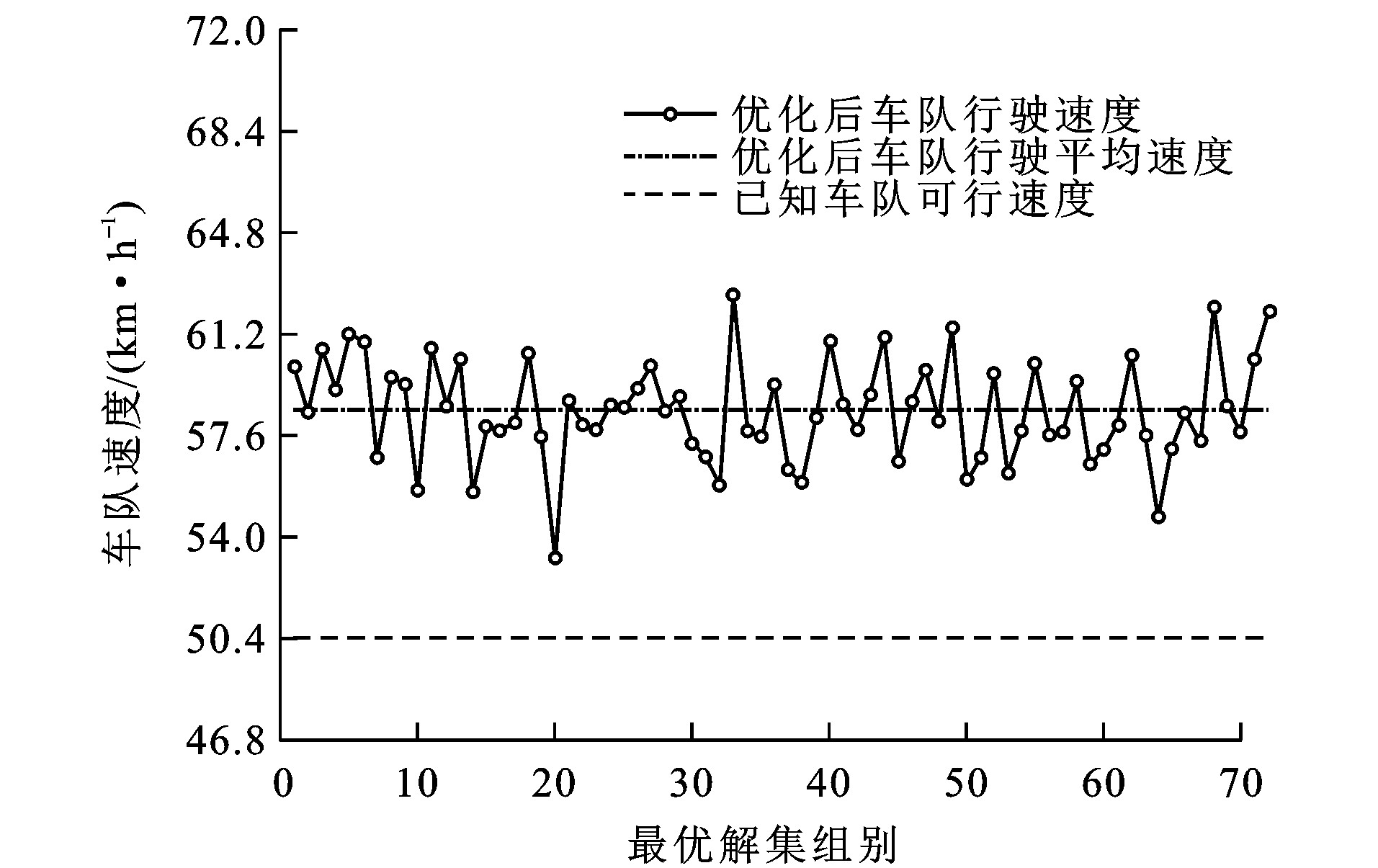
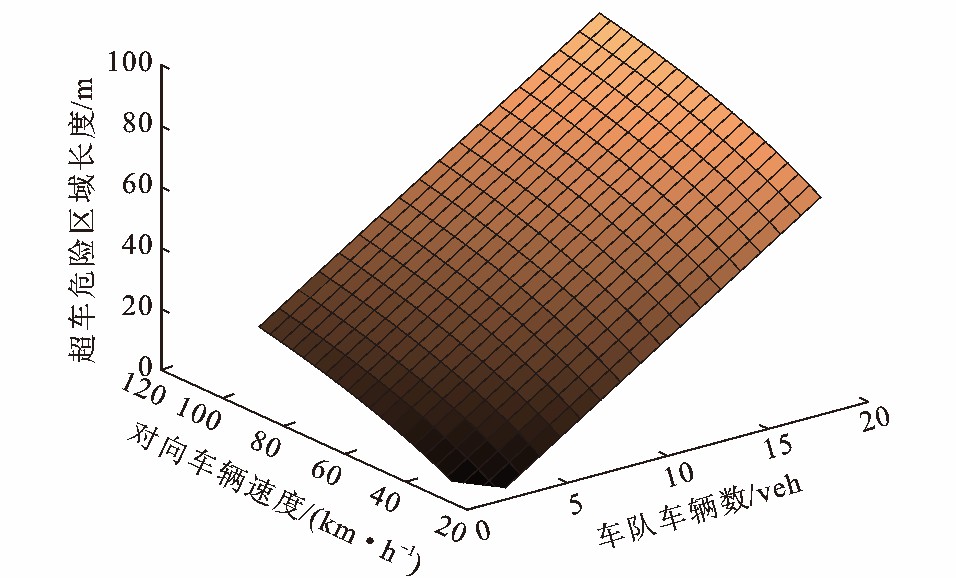
摘要: 建立了双向双车道环境下单车超越车队模型, 分析了影响双向双车道超车危险区域范围的主要因素; 设计了分步式单车超越车队算法, 研究了安全间隙前后车速度、超车车辆入队速度与车队安全间隙范围四者之间的关系, 提出了车辆入队所需最小安全间隙的速度匹配方案; 建立了单车超越车队算法的目标函数, 设定最大允许超车时间内超车车辆与车队行驶距离最大, 超车车辆超越车队车辆数最多, 前、后车形成安全间隙过程中加速度、减速度最小; 提出了基于改进粒子群的分级约束多目标优化方法, 为单车超越车队算法中的三级车速引导提供了优化的速度引导方案。研究结果表明: 双向双车道环境下超车危险区域范围与车队车辆数及对向车辆行驶速度成正相关关系; 改进的粒子群优化算法相比传统算法具有更强的鲁棒性和更快的收敛速度, 平均收敛时间缩短39.2%;在分步式单车超越车队过程中, 车队车辆平均速度提升9.04%, 即在车队间隙生成过程中, 虽然部分车辆速度减小, 但车队整体平均速度得到提升; 超车车辆平均速度提升16.8%, 即在超车过程中, 不仅超车车辆的安全性得到保证, 其运行效率也得到提升。Abstract: A model of single vehicle overtaking a platoon on the dual-lane two-way road was established, and the key factors affecting the range of dangerous overtaking zone were analyzed. The step-by-step algorithm was designed when single vehicle overtakes the platoon. The relationship among the speeds of the vehicles before and after the safety slot, the speed of the overtaking vehicle entering the platoon and the safety slot range of the platoon was studied. The speed matching scheme with the minimum safety slot required for the vehicle to overtake the platoon was proposed. The objective function of the algorithm was established, and the following assumptions were made in the maximum allowable overtaking time: the overtaking vehicle and platoon travelled the longest distance, the overtaking vehicle overtaked the platoon by the most vehicles, and the acceleration and deceleration of front and rear vehicles were the minimum in the forming process of safety slot. The hierarchical constrained multi-objective optimization method based on the improved particle swarm was proposed to provide the algorithm with the optimized three-level speed guidance strategy. Analysis result shows that the overtaking dangerous zone on dual-lane two-way road is positively correlated with the number of vehicles in the platoon and the velocities of the opposite vehicles. The improved particle swarm optimization algorithm has stronger robustness and faster convergence than the traditional algorithm, and the average convergence time reduces by 39.2%. In the step-by-step process that the single vehicle overtakes the platoon, the average speed of the vehicles in the platoon increase by 9.04%, which means that in the forming process of safety slot, although the speeds of some vehicles decrease, the overall average speed of the platoon increases. The average speed of overtaking vehicle increases by 16.8%, which means that in the overtaking process, not only is the safety of overtaking vehicle guaranteed, but also its operating efficiency is improved.
-

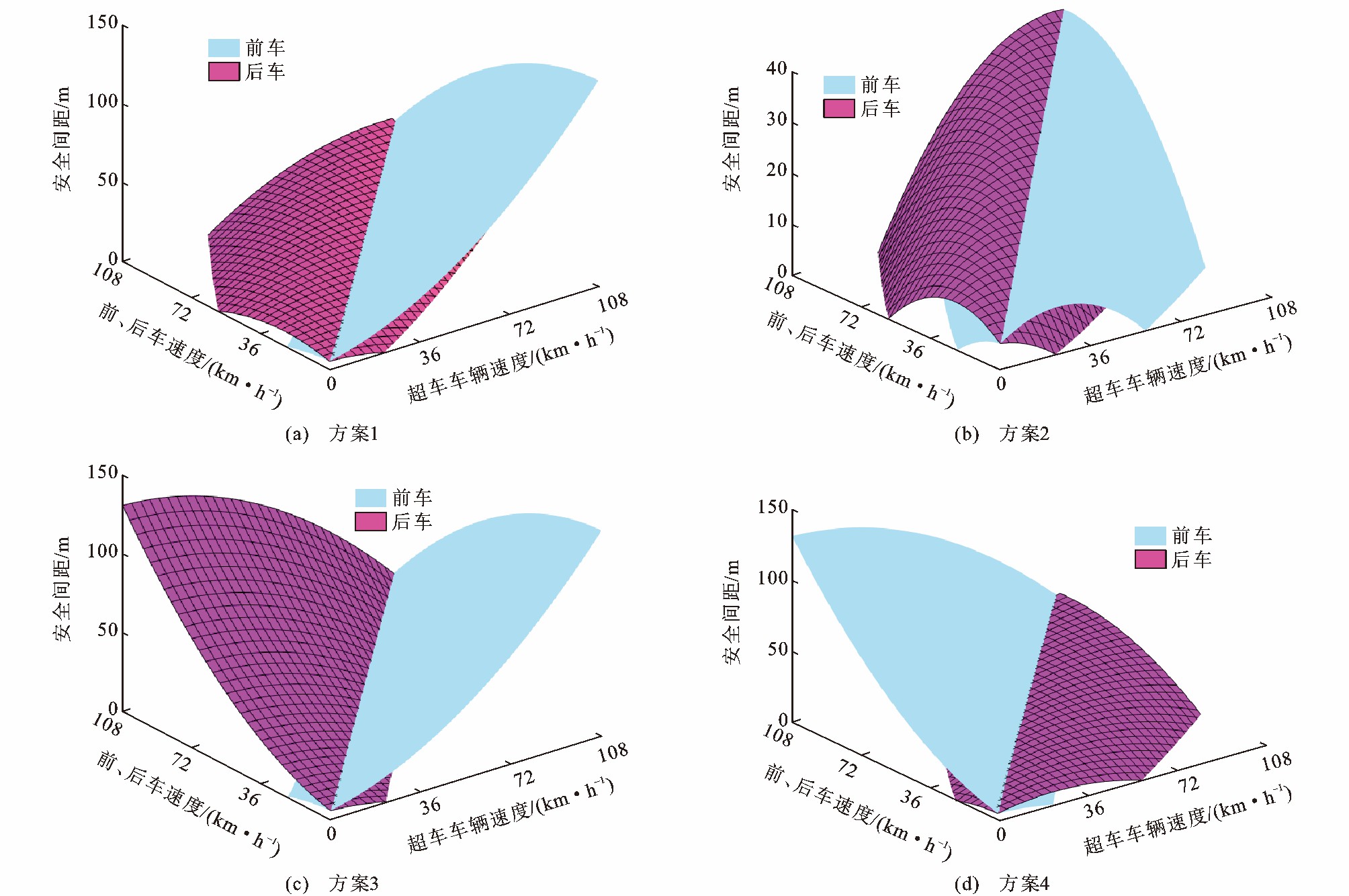
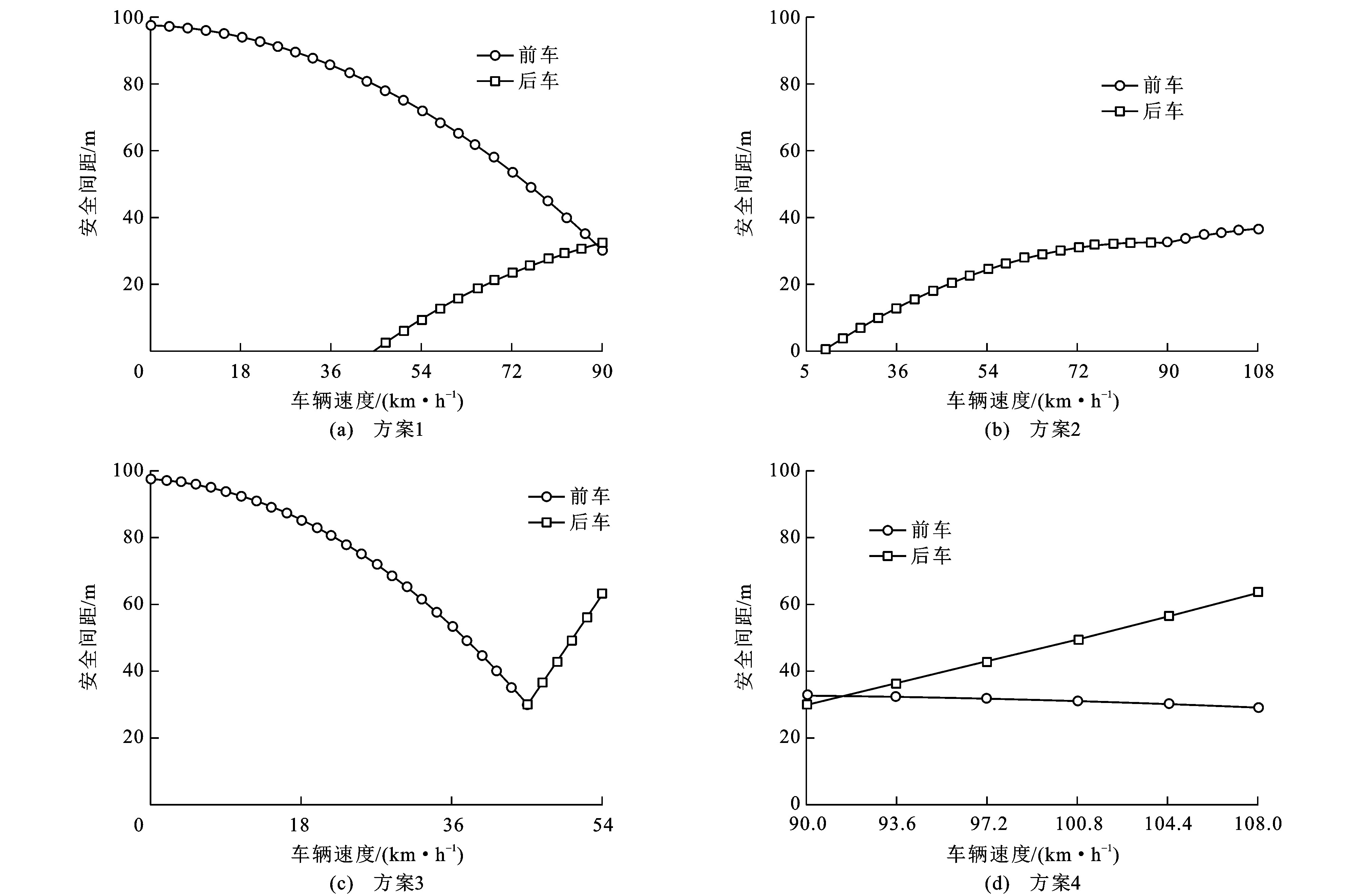
图 3 不同车速关系条件下安全间距分布
Figure 3. Safety distance distributions under different velocity relationships

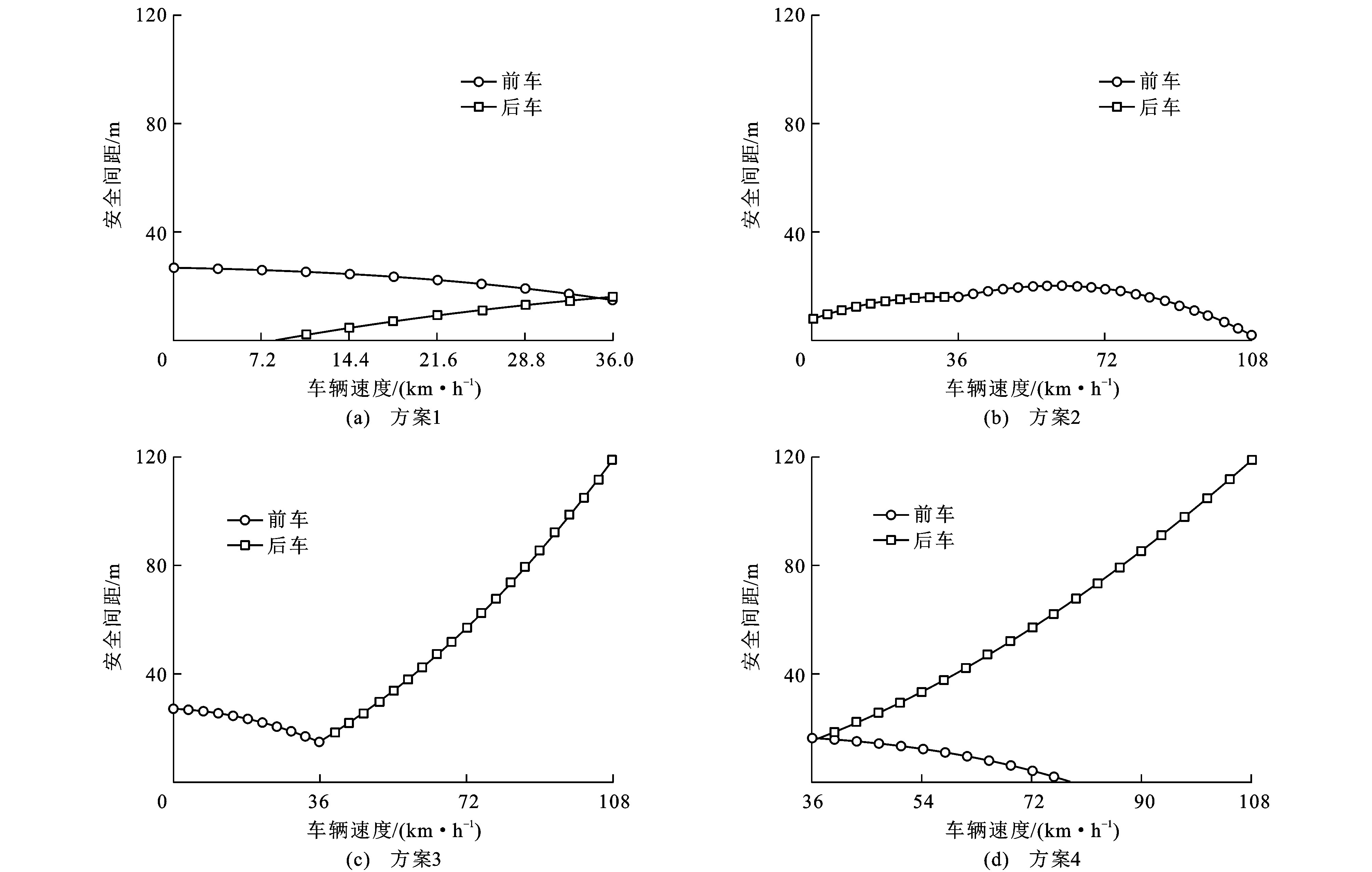
图 4 超车车速为36 km·h-1时前、后车速与安全间距关系曲线
Figure 4. Relationship curves between speeds of front and rear vehicles and safety distance when overtaking velocity is 36 km·h-1

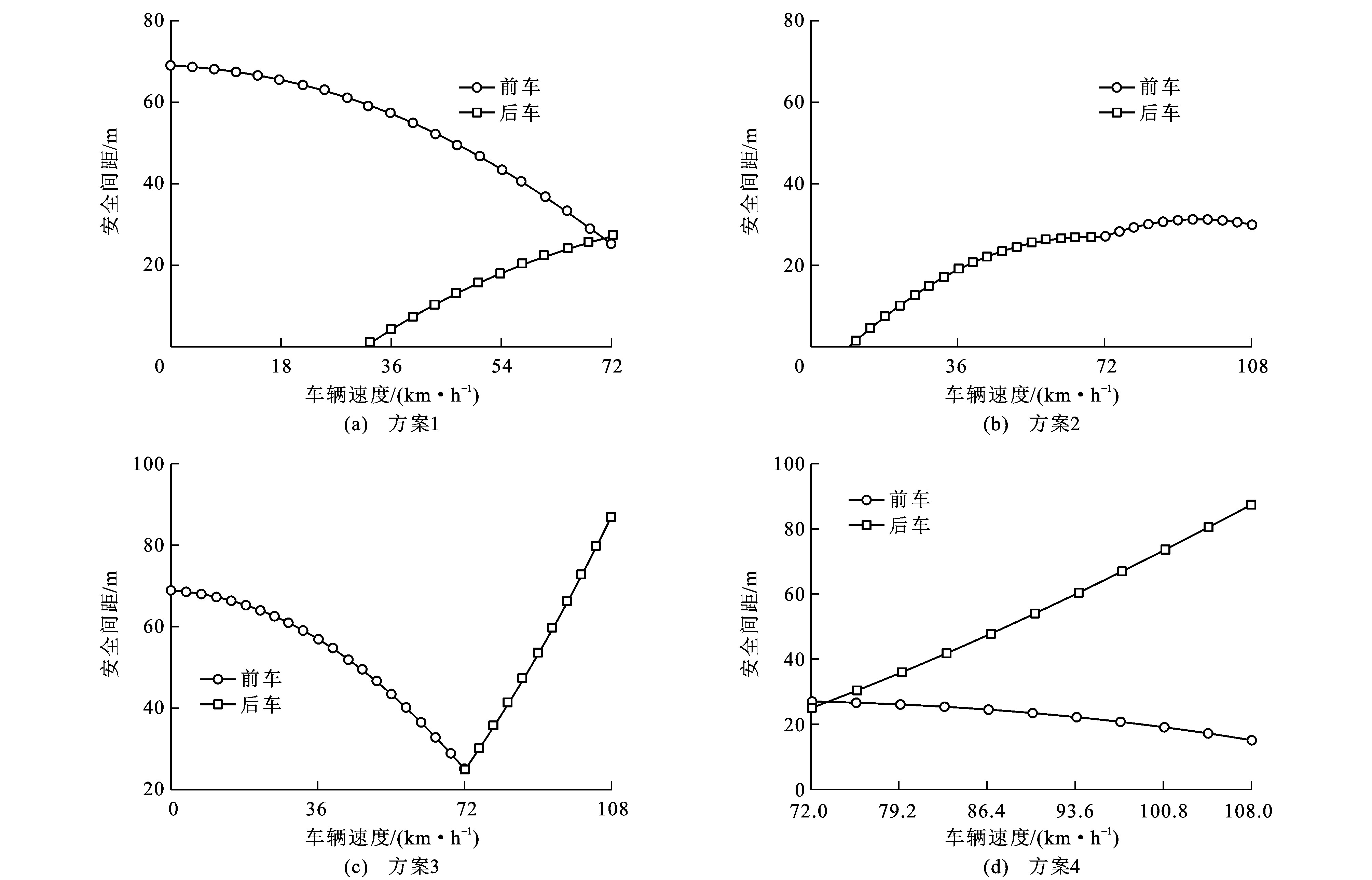
图 5 超车车速为72 km·h-1时前、后车速与安全间距关系曲线
Figure 5. Relationship curves between speeds of front and rear vehicles and safety distance when overtaking velocity is 72 km·h-1

图 6 超车车速为90 km·h-1时前、后车速与安全间距关系曲线
Figure 6. Relationship curves between speeds of front and rear vehicles and safety distance when overtaking velocity is 90 km·h-1

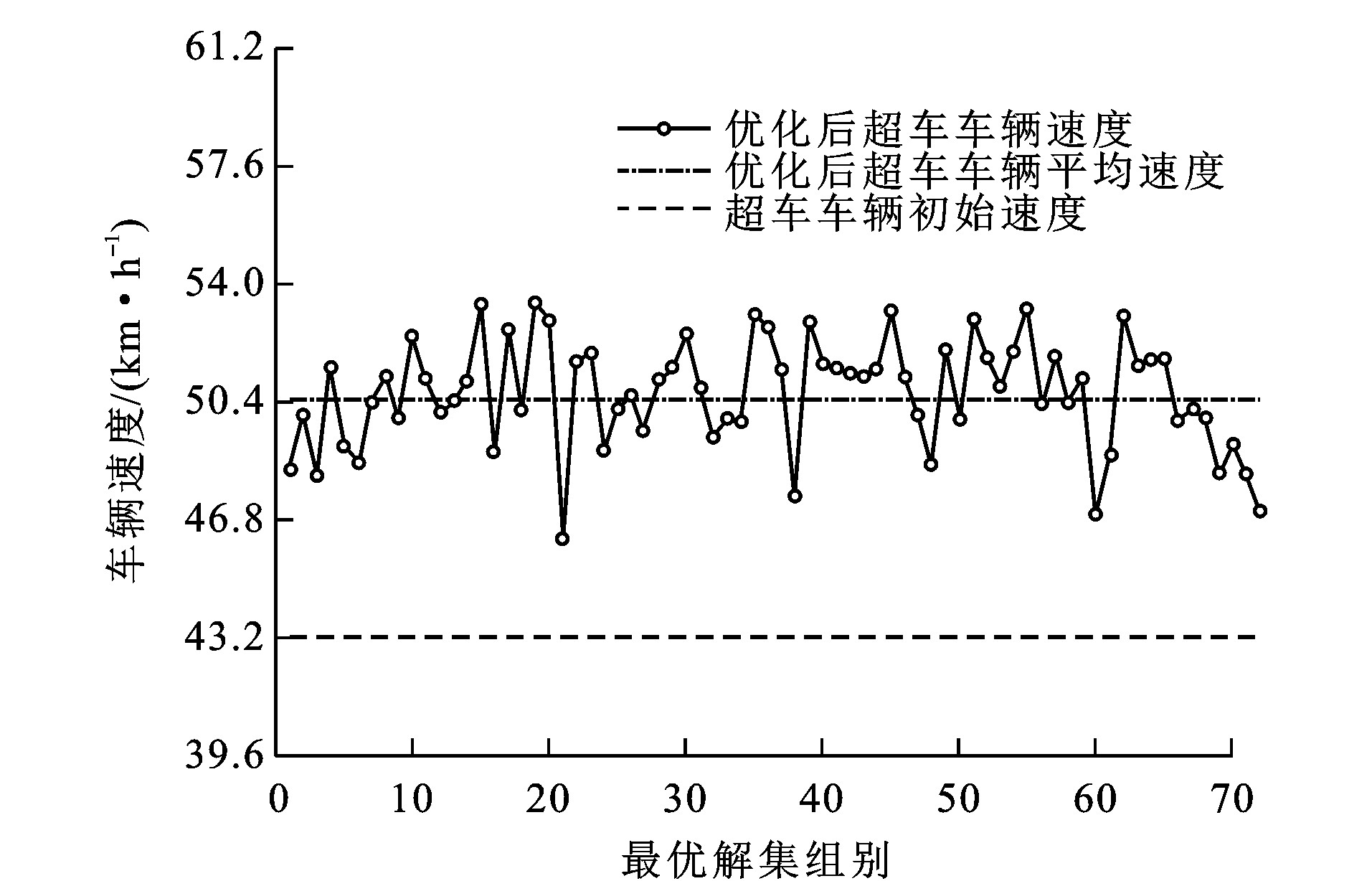
图 8 分步式超车策略中超车车辆速度
Figure 8. Velocity of overtaking vehicle in step-by-step overtaking strategy
表 1 v5~v7关系
Table 1. Relationship among v5, v6and v7
方案 v5与v6关系 v5与v7关系 图示 1 v5 > v6 v5 > v7 3 (a) 2 v5≤v6 v5 > v7 3 (b) 3 v5 > v6 v5≤ v7 3 (c) 4 v5≤v6 v5≤v7 3 (d)  下载: 导出CSV
下载: 导出CSV
表 2 分步式超车仿真参数
Table 2. Simulation parameters of step-by-step overtaking
参数 数值 s3/m 600 H/m 0.5 l1、l2/m 5 N/veh 30 a2/ (m·s-2) 4 a3/ (m·s-2) 4 a4/ (m·s-2) 7 v0/ (m·s-1) 12 v′k/ (m·s-1) 10 v1/ (m·s-1) 10 t3/s 1 t4/s 0.2 t11/s 3
下载: 导出CSV
表 3 分步式超车最优控制策略
Table 3. Optimal control strategy of step-by-step overtaking
车辆行驶距离/m 超越车队车辆数/veh 安全间隙后车减速度/ (m·s-2) 安全间隙前车加速度/ (m·s-2) 超车车辆入队减速度/ (m·s-2) 超车车辆减速时间/s 169.69 4 4.27 2.11 4.28 2.19 169.58 3 4.77 3.07 3.52 1.70 169.48 3 4.51 2.98 4.58 1.54 169.19 4 4.32 2.54 4.63 1.16 169.18 3 4.41 2.64 3.71 2.21 ︙ ︙ ︙ ︙ ︙ ︙ 168.22 3 4.42 2.69 4.47 2.08 167.59 3 4.79 3.01 4.07 1.65 167.58 3 4.87 2.76 4.39 1.23 167.19 3 4.65 3.58 3.92 2.15 167.11 4 5.23 2.92 4.25 2.13 ︙ ︙ ︙ ︙ ︙ ︙ 166.88 3 4.63 3.05 3.96 1.70 166.76 3 5.09 3.00 3.82 1.52 166.69 3 5.03 3.78 3.39 1.27 166.63 4 5.47 3.04 3.84 2.00 166.42 3 4.22 2.45 4.73 0.94
下载: 导出CSV
-
[1] ZHANG Wen-hui, DAI Jing, PEI Yu-long, et al. Drivers' visual search patterns during overtaking maneuvers on freeway[J]. International Journal of Environmental Research and Public Health, 2016, 13: 1-15. [2] RAWAT K, KATIYAR V K, GUPTA P. Two-lane traffic flow simulation model via cellular automaton[J]. International Journal of Vehicular Technology, 2012, 2012: 1-6. [3] 王润琪, 周永军, 肖传恩. 双车道公路超车视距计算方法[J]. 交通运输工程学报, 2011, 11 (3): 68-73. doi: 10.3969/j.issn.1671-1637.2011.03.012WANG Run-qi, ZHOU Yong-jun, XIAO Chuan-en. Calculation method of overtaking sight distance for dual-lane highway[J]. Journal of Traffic and Transportation Engineering, 2011, 11 (3): 68-73. (in Chinese). doi: 10.3969/j.issn.1671-1637.2011.03.012 [4] 许伦辉, 胡三根, 伍帅, 等. 考虑车辆运行特性的双车道超车模型[J]. 华南理工大学学报(自然科学版), 2015, 43 (4): 7-13, 27. doi: 10.3969/j.issn.1000-565X.2015.04.002XU Lun-hui, HU San-gen, WU Shuai, et al. Overtaking model for two-lane highway considering vehicle running characteristics[J]. Journal of South China University of Technology (Natural Science Edition), 2015, 43 (4): 7-13, 27. (in Chinese). doi: 10.3969/j.issn.1000-565X.2015.04.002 [5] CHENG Sen-lin, WANG Chuan-hai, ZHANG Shuang-teng, et al. Study on control strategy for personalised lane-change on highway[J]. The Journal of Engineering, 2018, 2018 (16): 1724-1730. doi: 10.1049/joe.2018.8269 [6] LLORCA C, MORENO A T, GARCIA A. Modelling vehicles acceleration during overtaking manoeuvres[J]. IET Intelligent Transport Systems, 2016, 10 (3): 206-215. doi: 10.1049/iet-its.2015.0035 [7] ATOMBO C, WU Chao-zhong, ZHONG Ming, et al. Investigating the motivational factors influencing drivers intentions to unsafe driving behaviours: speeding and overtaking violations[J]. Transportation Research Part F: Traffic Psychology and Behavior, 2016, 43: 104-121. doi: 10.1016/j.trf.2016.09.029 [8] 荣建, 刘世杰, 邵长桥, 等. 超车模型在双车道公路仿真系统中的应用研究[J]. 公路交通科技, 2007, 24 (11): 136-139. doi: 10.3969/j.issn.1002-0268.2007.11.030RONG Jian, LIU Shi-jie, SHAO Chang-qiao, et al. Application of overtaking model in two-lane highway simulation system[J]. Journal of Highway and Transportation Research and Development, 2007, 24 (11): 136-139. (in Chinese). doi: 10.3969/j.issn.1002-0268.2007.11.030 [9] 党睿娜, 王建强, 李克强, 等. 高速公路行驶条件下的驾驶员换道特性[J]. 清华大学学报(自然科学报), 2013, 53 (10): 1481-1485. https://www.cnki.com.cn/Article/CJFDTOTAL-QHXB201310022.htmDANG Rui-na, WANG Jian-qiang, LI Ke-qiang, et al, Driver lane change characteristics for various highway driving conditions[J]. Journal of Tsinghua University (Science and Technology), 2013, 53 (10): 1481-1485. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-QHXB201310022.htm [10] 王畅, 付锐, 张琼, 等. 换道预警系统中参数TTC特性研究[J]. 中国公路学报, 2015, 28 (8): 91-100, 108. doi: 10.3969/j.issn.1001-7372.2015.08.012WANG Chang, FU Rui, ZHANG Qiong, et al. Research on parameter TTC characteristics of lane change warning system[J]. China Journal of Highway and Transport, 2015, 28 (8): 91-100, 108. (in Chinese). doi: 10.3969/j.issn.1001-7372.2015.08.012 [11] 徐磊, 彭金栓. 基于Carsim和Simulink的超车换道仿真分析[J]. 科学技术与工程, 2014, 14 (29): 300-303. doi: 10.3969/j.issn.1671-1815.2014.29.058XU Lei, PENG Jin-shuan. Simulation and analysis on overtaking lane change based on Simulink and Carsim[J]. Science Technology and Engineering, 2014, 14 (29): 300-303. (in Chinese). doi: 10.3969/j.issn.1671-1815.2014.29.058 [12] 柏伟, 李存军. 基于不同限速条件下的超车模型研究[J]. 交通运输系统工程与信息, 2013, 13 (2): 63-68, 95. doi: 10.3969/j.issn.1009-6744.2013.02.010BAI Wei, LI Cun-jun. Overtaking model based on different limiting speed[J]. Journal of Transportation Systems Engineering and Information Technology, 2013, 13 (2): 63-68, 95. (in Chinese). doi: 10.3969/j.issn.1009-6744.2013.02.010 [13] 熊晓夏, 陈龙, 梁军, 等. 危险换道驾驶行为预测方法研究[J]. 汽车工程, 2017, 39 (9): 1040-1046, 1067. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201709010.htmXIONG Xiao-xia, CHEN Long, LIANG Jun, et al. A study on the driving behavior prediction of dangerous lane change[J]. Automotive Engineering, 2017, 39 (9): 1040-1046, 1067. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201709010.htm [14] 李珣, 曲仕茹, 夏余. 车路协同环境下多车道车辆的协同换道规则[J]. 中国公路学报, 2014, 27 (8): 97-104. doi: 10.3969/j.issn.1001-7372.2014.08.013LI Xun, QU Shi-ru, XIA Yu. Cooperative lane-changing rules on multilane under condition of cooperative vehicle and infrastructure system[J]. China Journal of Highway and Transport, 2014, 27 (8): 97-104. (in Chinese). doi: 10.3969/j.issn.1001-7372.2014.08.013 [15] MILANÉS V, LLORCA D F, VILLAGRÁ J, et al. Intelligent automatic overtaking system using vision for vehicle detection[J]. Expert Systems with Applications, 2012, 39 (3): 3362-3373. doi: 10.1016/j.eswa.2011.09.024 [16] CHEN Jun-jie, CAI Bai-gen, SHANGGUAN Wei, et al. Influence of Vehicle Cluster Driving Behavior on Traffic Flow Efficiency[C]//IEEE. 2017 Chinese Automation Congress. New York: IEEE, 2017: 6349-6354. [17] CHAPMAN J R, NOYCE D A. Influence of roadway geometric elements on driver behavior when overtaking bicycles on rural roads[J]. Journal of Traffic and Transportation Engineering (English Edition), 2014, 1 (1): 28-38. doi: 10.1016/S2095-7564(15)30086-6 [18] ASAITHAMBI G, SHRAVANI F. Overtaking behavior of vehicles on undivided roads in non-lane based mixed traffic conditions[J]. Journal of Traffic and Transportation Engineering (English Edition), 2017, 4 (3): 252-261. doi: 10.1016/j.jtte.2017.05.004 [19] 杨晓光, 黄罗毅, 王吟松, 等. 基于车车通信的换道超车辅助系统设计与实现[J]. 公路交通科技, 2012, 29 (11): 120-124. doi: 10.3969/j.issn.1002-0268.2012.11.022YANG Xiao-guang, HUANG Luo-yi, WANG Yin-song, et al. A novel lane change and overtaking assist system design and implementation based on vehicle-to-vehicle communication[J]. Journal of Highway and Transportation Research and Development, 2012, 29 (11): 120-124. (in Chinese). doi: 10.3969/j.issn.1002-0268.2012.11.022 [20] KINNEAR N, HELMAN S, WALLBANK C, et al. An experimental study of factors associated with driver frustration and overtaking intentions[J]. Accident Analysis and Prevention, 2015, 79: 221-230. doi: 10.1016/j.aap.2015.03.032 [21] VLAHOGIANNI E I, GOLIAS J C. Bayesian modeling of the microscopic traffic characteristics of overtaking in two-lane highways[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2012, 15 (3): 348-357. doi: 10.1016/j.trf.2012.02.002 [22] HAJEK W, GAPONOVA I, FlEISCHER K H, et al. Workload-adaptive cruise control—a new generation of advanced driver assistance systems[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2013, 20: 108-120. doi: 10.1016/j.trf.2013.06.001 [23] KOSUN C, OZDEMIR S. An entropy-based analysis of lane changing behavior: an interactive approach[J]. Traffic Injury Prevention, 2017, 18 (4): 441-447. doi: 10.1080/15389588.2016.1204446 [24] YU Yue, EL KAMEL A, GONG Guang-hong, Modeling and simulation of overtaking behavior involving environment[J]. Advances in Engineering Software, 2014, 67: 10-21. [25] DIXIT S, FALLAH S, MONTANARO U, et al. Trajectory planning and tracking for autonomous overtaking: State-of-the-art and future prospects[J]. Annual Reviews in Control, 2018, 45: 76-86. doi: 10.1016/j.arcontrol.2018.02.001 [26] XU Guo-qing, LIU Li, OU Yong-sheng, et al. Dynamic modeling of driver control strategy of lane-change behavior and trajectory planning for collision prediction[J]. IEEE Transportations on Intelligent Transportation Systems, 2012, 13 (3): 1138-1155. [27] YANG Da, ZHENG Shi-yu, WEN Cheng, et al. A dynamic lane-changing trajectory planning model for automated vehicles[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 228-247. [28] SUH J, CHAE H, YI K. Stochastic model-predictive control for lane change decision of automated driving vehicles[J]. IEEE Transactions on Vehicular Technology, 2018, 67 (6): 4771-4782. [29] ZHU Wen-xing, ZHANG Li-dong. A new car-following model for autonomous vehicles flow with mean expected velocity field[J]. Physica A: Statistical Mechanics and its Applications, 2018, 492: 2154-2165. [30] 单晓峰, 夏东, 王昊. 双车道公路超车两难区域研究[J]. 公路交通科技, 2007, 24 (3): 111-114. https://www.cnki.com.cn/Article/CJFDTOTAL-GLJK200703025.htmSHAN Xiao-feng, XIA Dong, WANG Hao. Dilemma zone in two-lane highways[J]. Journal of Highway and Transportation Research and Development, 2007, 24 (3): 111-114. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GLJK200703025.htm -

 点击查看大图
点击查看大图
计量
- 文章访问数: 934
- HTML全文浏览量: 128
- PDF下载量: 532
- 被引次数: 0
