

Optimization on motion sequence of alignment platform between sensor intelligent chip and fiber array
-
摘要: 从运动平台空间运动可能存在的720种运动顺序配置入手, 针对智能芯片与阵列光纤对接过程各运动单元产生的几何误差进行敏感性分析, 通过区分和归类各运动单元的敏感误差和不敏感误差, 将运动平台运动顺序配置数减少到90;考虑到运动平台各运动单元具有均匀分散、齐整可比的特性, 运用正交试验设计方法将敏感误差和不敏感误差确定为3个水平, 将6个运动单元确定为6个影响因素, 建立了对应的正交试验表, 得出了5条运动顺序配置的试验路径; 借助MATLAB仿真平台对5条运动顺序配置的试验路径进行了仿真试验, 获得了运动平台运动顺序最优配置; 在封装系统多自由度精密运动平台上进行了实测试验, 检验了仿真试验结果。试验结果表明: 传感器智能芯片与阵列光纤对接的运动平台在空间直角坐标系中最优的运动顺序为先沿横轴平动, 再绕横轴转动, 再绕纵轴转动, 最后沿纵轴平动; 该方法可优化光纤扫描雷达传感器智能芯片与阵列光纤对接的运动平台的空间运动顺序, 还可预测和规划其他多自由度运动平台的配准路径。Abstract: Starting with the 720 types of possible motion sequence configurations of spatial motion of motion platform, the sensitivity of geometric error generated by each moving unit during the alignment process between the intelligent chip and fiber array was analyzed. Through distinguishing and classifying the sensitive and insensitive error of each motion unit, the number of motion sequence configurations was reduced to 90. Considering the uniform, decentralized, neat, and comparable characteristics of each motion unit, the orthogonal test design method was used to determine the sensitive and insensitive errors into 3 levels, and determine the 6 motion units into 6 influencing factors. The corresponding orthogonal test table was established, and 5 test paths of motion sequence configurations were obtained. The 5 test paths of motion sequence configurations were simulated through the MATLAB simulation platform, and the optimal motion sequence configuration of motion platform was obtained. The field test was conducted on the multi-degree-of-freedom precision motion platform of packaging system, and the simulation results were verified. Test result indicates that the optimal motion sequence of motion platform for docking the sensor intelligent chip and fiber array in space rectangular coordinates is moving along the horizontal axis first, then rotating around the horizontal axis, and then rotating around the vertical axis, and finally moving along the vertical axis. This method can not only optimize the spatial motion sequence of motion platform aligned by fiber scanning radar sensor smart chip and array optical fiber, but also can predict and plan the registration paths of other multi-degree-of-freedom motion platforms.
-

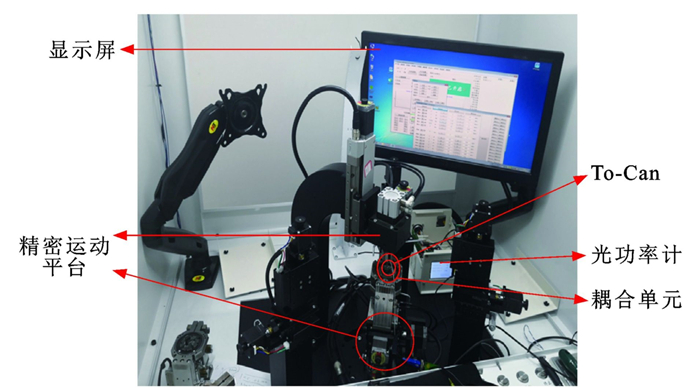
图 1 多自由度运动平台的封装系统
Figure 1. Packaging system of multi-degree-of-freedom motion platform

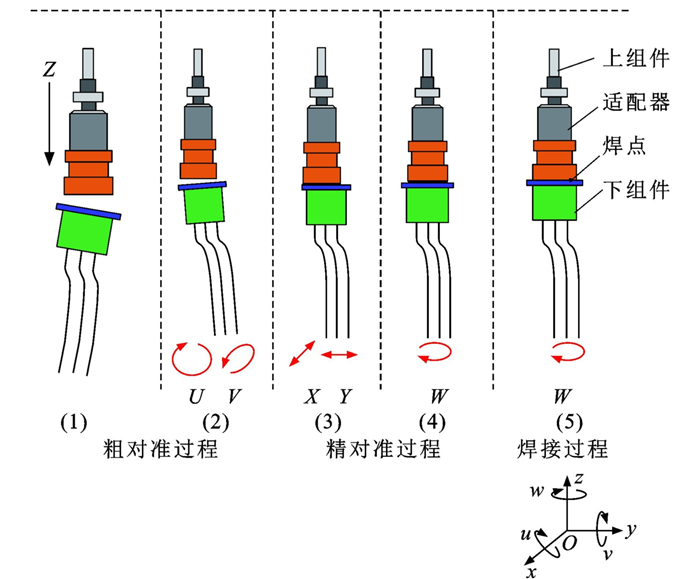
图 2 封装系统对准过程和焊接过程
Figure 2. Alignment procedure and welding process in packaging system

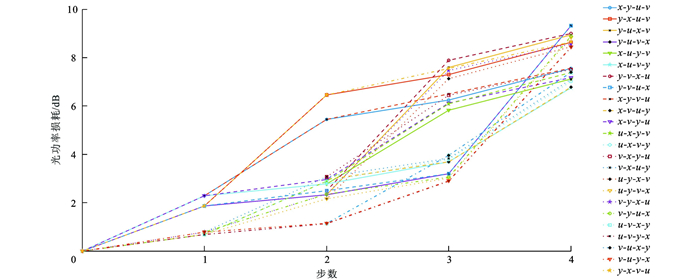
图 4 运动顺序为X-W-Z-U-V-Y的仿真结果
Figure 4. Simulation results when motion sequence is X-W-Z-U-V-Y

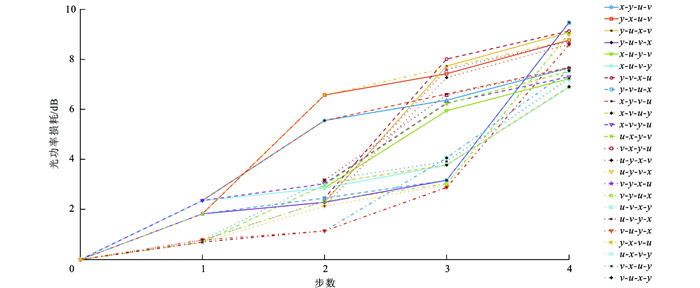
图 5 运动顺序为W-V-X-U-Z-Y的仿真结果
Figure 5. Simulation results when motion sequence is W-V-X-U-Z-Y

图 6 运动顺序为U-V-Z-W-Y-X的仿真结果
Figure 6. Simulation results when motion sequence is U-V-Z-W-Y- X

图 7 运动顺序为Y-U-X-W-V-Z的仿真结果
Figure 7. Simulation results when motion sequence is Y-U-X-W-V-Z

图 8 运动顺序为Z-Y-V-W-U-X的仿真结果
Figure 8. Simulation results when motion sequence is Z-Y-V-W-U-X

图 9 To-Can型LD组件封装配准过程
Figure 9. Packaging and aligning processes for LD component of type To-Can
表 1 运动路径配置的正交试验
Table 1. Orthogonal test for motion paths configuration
因素 位置1 位置2 位置3 1水平 B B B 2水平 A A A 3水平 C C C 因子 位置4 位置5 位置6 1水平 B B B 2水平 A A A 3水平 C C C  下载: 导出CSV
下载: 导出CSV
表 2 A、B和C水平下参数初始赋值
Table 2. Initial values of parameters under levels A, B and C
误差名称 误差表达式 初始赋值 轴向误差/μm UR, x、UR, y、UR, z、UR, v、UR, w 0.1 半径误差/μm VR, x、VR, y、VR, z、VR, u、VR, w 0.1 倾斜误差/μm WR, x、WR, y、WR, z、WR, u、WR, v 0.1 装配误差/μm 0.5 直线度误差/μm 1.0 定位误差/μm XT, x、YT, y、ZT, z 2.0 弧度误差/μm UR, u、VR, v、WR, w 3.0
下载: 导出CSV
表 3 正交试验计算结果
Table 3. Calculation results of orthogonal test
试验序列 正交试验序列号 结果 1 2 3 4 5 6 1 B B B B B B 0 2 B A A A A A 0 3 B C C C C C 0 4 A B B A A C 0 5 A A A C C B 0 6 A C C B B A 1 7 C B A B C A 1 8 C A C A B C 0 9 C C B C A B 0 10 B B C C A A 1 11 B A B B A A 0 12 B C A A B B 0 13 A B A C B C 1 14 A A C B A B 0 15 A C B A C A 0 16 C B C A C B 0 17 C A B C B A 1 18 C C A B A C 0
下载: 导出CSV
表 4 运动顺序为X-W-Z-U-V-Y时24种影响因素每步光功率损耗
Table 4. Optical power losses at every step by 24 influence factors when motion sequence is X-W-Z-U-V-Y
影响因素 第1步 第2步 第3步 第4步 x-y-u-v 2.33 5.29 6.10 7.39 y-x-u-v 1.76 6.28 7.12 8.45 y-u-x-v 1.76 2.21 7.43 8.77 y-u-v-x 1.76 2.21 3.08 9.16 x-u-y-v 2.33 2.83 5.69 6.97 x-u-v-y 2.33 2.83 3.73 6.63 y-v-x-u 1.76 2.38 7.72 8.82 y-v-u-x 1.76 2.38 3.08 9.15 x-y-v-u 2.33 5.29 6.34 7.40 x-v-u-y 2.33 3.00 3.74 6.66 x-v-y-u 2.33 3.00 6.00 7.04 u-x-y-v 0.69 2.94 5.97 7.25 u-x-v-y 0.69 2.94 3.85 6.91 v-x-y-u 0.78 3.13 6.31 7.37 v-x-u-y 0.78 3.13 3.89 6.99 u-y-x-v 0.69 2.07 6.98 8.30 u-y-v-x 0.69 2.07 2.92 8.69 v-y-x-u 0.78 2.27 7.32 8.41 v-y-u-x 0.78 2.27 2.95 8.74 u-v-x-y 0.69 1.13 4.02 7.27 u-v-y-x 0.69 1.13 2.81 8.30 v-u-x-y 0.78 1.14 4.02 7.29 v-u-y-x 0.78 1.14 2.83 8.31 y-x-v-u 1.76 6.28 7.37 8.46
下载: 导出CSV
表 5 四个敏感单元每步所产生的平均光功率损耗
Table 5. Average optical power losses at every step generated by four sensitive units
敏感单元 第1步 第2步 第3步 第4步 X 2.33 3.04 4.38 5.78 Y 1.76 1.94 2.57 3.08 U 0.69 0.43 0.75 1.07 V 0.78 0.58 0.94 1.30
下载: 导出CSV
表 6 敏感单元Y、U和V在余下3步的平均光功率损耗
Table 6. Average optical power losses for sensitive units Y, U and V on rest three steps
敏感单元 第2步 第3步 第4步 Y 2.96 2.93 2.91 U 0.67 0.98 1.28 V 0.49 0.77 1.05
下载: 导出CSV
表 7 敏感单元U和V在余下2步的平均光功率损耗
Table 7. Average optical power losses for sensitive units U and V on rest two steps
敏感单元 第3步 第4步 U 0.49 0.86 V 0.67 0.91
下载: 导出CSV
表 8 敏感单元X、Y、U和V在4步运动中产生的平均光功率损耗
Table 8. Average optical power losses of sensitive units X, Y, U and V on four motion steps
敏感单元 第1步 第2步 第3步 第4步 X 4.79 7.12 9.15 5.15 Y 3.08 5.21 5.95 1.09 U 0.81 2.61 6.02 1.30 V 0.65 1.89 2.51 0.06
下载: 导出CSV
表 9 敏感单元Y、U和V在余下3步运动中产生的平均光功率损耗
Table 9. Average optical power losses of sensitive units Y, U and V on rest three steps
敏感单元 第2步 第3步 第4步 Y 6.05 7.92 0.20 U 5.59 8.20 0.90 V 1.34 1.38 0.83
下载: 导出CSV
表 10 敏感单元U和V在余下2步运动中产生的平均光功率损耗
Table 10. Average optical power losses of sensitive units U and V on rest two steps
敏感单元 第3步 第4步 U 5.11 7.95 V 1.46 0.77
下载: 导出CSV
-
[1] LI Jing, SONG Ning-fang, YANG Gong-liu, et al. Improving positioning accuracy of vehicular navigation system during GPS outages utilizing ensemble learning algorithm[J]. Information Fusion, 2017, 35: 1-10. doi: 10.1016/j.inffus.2016.08.001 [2] 王艺辉, 刘延飞, 赵鹏涛, 等. 基于九轴姿态传感器的智能汽车平面定位模块设计与实践[J]. 科技与创新, 2018(6): 3-6. https://www.cnki.com.cn/Article/CJFDTOTAL-KJYX201806002.htmWANG Yi-hui, LIU Yan-fei, ZHAO Peng-tao, et al. Design and application of planar positioning module for intelligence vehicle based on 9-axis orientation sensor[J]. Science and Technology Innovation, 2018(6): 3-6. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KJYX201806002.htm [3] TANG Hao, ZHANG Zi-lin, LI Chang-ping, et al. A geometric error modeling method and trajectory optimization applied in laser welding system[J]. International Journal of Precision Engineering and Manufacturing, 2019, 20: 1423-1433. doi: 10.1007/s12541-019-00151-8 [4] 王金伟, 郝欣. 基于雷达与光学传感器的协同定轨技术[J]. 中国电子科学研究院学报, 2019, 14(3): 296-300. doi: 10.3969/j.issn.1673-5692.2019.03.013WANG Jin-wei, HAO Xin. Cooperative orbit determination technology based on radar and optical sensor[J]. Journal of CAEIT, 2019, 14(3): 296-300. (in Chinese). doi: 10.3969/j.issn.1673-5692.2019.03.013 [5] 唐铂, 李振华, 王春勇, 等. 线阵扫描三维成像激光雷达系统[J]. 激光与红外, 2017, 47(11): 1358-1364. doi: 10.3969/j.issn.1001-5078.2017.11.007TANG Bo, LI Zhen-hua, WANG Chun-yong, et al. 3D imaging laser radar based on laser array and APD array[J]. Laser and Infrared, 2017, 47(11): 1358-1364. (in Chinese). doi: 10.3969/j.issn.1001-5078.2017.11.007 [6] OMIDI E, KORAYEM A H, KORAYEM M H. Sensitivity analysis of nanoparticles pushing manipulation by AFM in a robust controlled process[J]. Precision Engineering, 2013, 37(3): 658-670. doi: 10.1016/j.precisioneng.2013.01.011 [7] 安天益, 朱启荣, 吴昊. 基于光纤光栅传感器的复合材料损伤探测研究[J]. 实验技术与管理, 2019, 36(6): 72-75. https://www.cnki.com.cn/Article/CJFDTOTAL-SYJL201906018.htmAN Tian-yi, ZHU Qi-rong, WU Hao. Study on damage detection of composite materials based on optical fiber grating sensor[J]. Experimental Technology and Management, 2019, 36(6): 72-75. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-SYJL201906018.htm [8] 李旭, 李保柱. 光纤扫描激光雷达技术[J]. 红外与激光工程, 2008, 37(5): 793-796. doi: 10.3969/j.issn.1007-2276.2008.05.010LI Xu, LI Bao-zhu. Fiber scanner radar technology[J]. Infrared and Laser Engineering, 2008, 37(5): 793-796. (in Chinese). doi: 10.3969/j.issn.1007-2276.2008.05.010 [9] SONG J B, CHOI S Y, PARK K. Aiming error analysis of guns ground combat vehicles operating on bumpy roads[J]. Journal of Mechanical Science and Technology, 2015, 29(12): 5145-5150. doi: 10.1007/s12206-015-1114-x [10] 刘强, 毕卫红, 付兴虎, 等. 基于少模光纤长周期光栅叠栅的折射率传感特性[J]. 光子学报, 2018, 47(1): 0106001-1-7. https://www.cnki.com.cn/Article/CJFDTOTAL-GZXB201801014.htmLIU Qiang, BI Wei-hong, FU Xing-hu, et al. Refractive index sensing characteristic of superimposed long period gratings on few mode fiber[J]. Acta Photonic Sinica, 2018, 47(1): 0106001-1-7. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GZXB201801014.htm [11] TANG Hao, LI Chang-ping, ZHANG Zi-lin, et al. A novel geometric error modeling optimization approach based on error sensitivity analysis for multi-axis precise motion platform[J]. Journal of Mechanical Science and Technology, 2019, 33(7): 3435-3444. doi: 10.1007/s12206-019-0638-x [12] BOHEZ E L J, ARIYAJUNYA B, SINLAPEECHEEWA C, et al. Systematic geometric rigid body error identification of 5-axis milling machines[J]. Computer-Aided Design, 2007, 39: 229-244. doi: 10.1016/j.cad.2006.11.006 [13] TAN K K, HUANG S N, LIM S Y, et al. Geometric error modeling and compensation using neural networks[J]. IEEE Transactions on System Man Cybernetics—Part C: Applications and Reviews, 2006, 36(6): 797-809. doi: 10.1109/TSMCC.2005.855527 [14] ZI Bin, DING Hua-feng, WU Xia, et al. Error modeling and sensitivity analysis of a hybrid-driven based cable parallel manipulator[J]. Precision Engineering, 2014, 38(1): 197-211. doi: 10.1016/j.precisioneng.2013.06.002 [15] 粟时平, 李圣怡, 王贵林. 基于空间误差模型的加工中心几何误差辨识方法[J]. 机械工程学报, 2002, 38(7): 121-125. doi: 10.3321/j.issn:0577-6686.2002.07.026SU Shi-ping, LI Sheng-yi, WANG Gui-lin. Identification method for errors of machining center based on volumetric error model[J]. Chinese Journal of Mechanical Engineering, 2002, 38(7): 121-125. (in Chinese). doi: 10.3321/j.issn:0577-6686.2002.07.026 [16] 杨建国, 任永强, 朱卫斌, 等. 数控机床热误差补偿模型在线修正方法研究[J]. 机械工程学报, 2003, 39(3): 81-84. doi: 10.3321/j.issn:0577-6686.2003.03.018YANG Jian-guo, REN Yong-qiang, ZHU Wei-bin, et al. Research on on-line modeling method of thermal error compensation model for CNC machines[J]. Chinese Journal of Mechanical Engineering, 2003, 39(3): 81-84. (in Chinese). doi: 10.3321/j.issn:0577-6686.2003.03.018 [17] 田延岭, 张大卫, 陈华伟, 等. 基于微定位工作台的精密磨削过程动力学建模与误差补偿技术[J]. 机械工程学报, 2005, 41(4): 168-173. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200504033.htmTIAN Yan-ling, ZHANG Da-wei, CHEN Hua-wei, et al. Modeling of precision grinding process based on micro-positioning table and error compensation technology[J]. Chinese Journal of Mechanical Engineering, 2005, 41(4): 168-173. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200504033.htm [18] 王秀山, 杨建国, 闫嘉钰. 基于多体系统理论的五轴机床综合误差建模技术[J]. 上海交通大学学报, 2008, 42(5): 761-764, 769. doi: 10.3321/j.issn:1006-2467.2008.05.017WANG Xiu-shan, YANG Jian-guo, YAN Jia-yu. Synthesis error modeling of the five-axis machine tools based on multi-body system theory[J]. Journal of Shanghai Jiaotong University, 2008, 42(5): 761-764, 769. (in Chinese). doi: 10.3321/j.issn:1006-2467.2008.05.017 [19] ZUO Xiao-yan, LI Bei-zhi, YANG Jian-guo. Error sensitivity analysis and precision distribution for multi-operation machining processes based on error propagation model[J]. International Journal of Advanced Manufacture Technology, 2016, 86(1-4): 269-280. doi: 10.1007/s00170-015-8154-3 [20] TANG Hao, DUAN Ji-an, LAN Shu-huai, et al. A new geometric error modeling approach for multi-axis system based on stream of variation theory[J]. International Journal of Machine Tools and Manufacture, 2015, 92: 41-51. doi: 10.1016/j.ijmachtools.2015.02.012 [21] TANG Hao, DUAN Ji-an, ZHAO Qian-cheng. A systematic approach on analyzing the relationship between straightness and angular errors and guideway surface in precise linear stage[J]. International Journal of Machine Tools and Manufacture, 2017, 120: 12-19. doi: 10.1016/j.ijmachtools.2017.04.010 [22] 唐皓, 段吉安, 郑煜, 等. 平面光波导精密对准平台运动误差的敏感性分析[J]. 中国机械工程, 2012, 23(8): 888-892, 896. doi: 10.3969/j.issn.1004-132X.2012.08.002TANG Hao, DUAN Ji-an, ZHENG Yu, et al. Motion error sensitivity analysis of planar optical waveguide precise aligning stage[J]. China Mechanical Engineering, 2012, 23(8): 888-892, 896. (in Chinese). doi: 10.3969/j.issn.1004-132X.2012.08.002 [23] WEI Wei-feng, ZHANG Guang-peng. Tool path modeling and error sensitivity analysis of crankshaft pin CNC grinding[J]. International Journal of Advanced Manufacturing Technology, 2016, 86: 2485-2502. doi: 10.1007/s00170-015-8253-1 [24] TANG Hao, DUAN Ji-an, LU Sheng-qiang. Stream-of-variation (SOV) theory applied in geometric error modeling for six-axis motion platform[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 120: 1-9. [25] TIAN Wen-jie, GAO Wei-guo, ZHANG Da-wei, et al. A general approach for error modeling of machine tools[J]. International Journal of Machine Tools and Manufacture, 2014, 79: 17-23. doi: 10.1016/j.ijmachtools.2014.01.003 [26] 钱小辉, 马骁妍, 秦中华, 等. 基于正交试验的玻璃壳热应力影响因素分析[J]. 机械工程学报, 2019, 55(12): 91-98. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201912012.htmQIAN Xiao-hui, MA Xiao-yan, QIN Zhong-hua, et al. Analysis of glass shell's thermal stress based on orthogonal experiment[J]. Journal of Mechanical Engineering, 2019, 55(12): 91-98. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201912012.htm [27] 郭芳, 原霞, 吉梦雯, 等. 基于二次回归正交试验的连杆衬套成形质量分析[J]. 塑性工程学报, 2018, 25(5): 153-157. https://www.cnki.com.cn/Article/CJFDTOTAL-SXGC201805022.htmGUO Fang, YUAN Xia, JI Meng-wen, et al. Forming quality analysis of connecting rod bushing based on quadratic regression orthogonal test[J]. Journal of Plasticity Engineering, 2018, 25(5): 153-157. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-SXGC201805022.htm [28] 陈达亮, 王东, 顾灿松, 等. 基于正交试验法的离合器动力学模型优化[J]. 机械工程与自动化, 2018(4): 160-162. doi: 10.3969/j.issn.1672-6413.2018.04.067CHEN Da-liang, WANG Dong, GU Can-song, et al. Clutch dynamic model optimization based on orthogonal experiment method[J]. Mechanical Engineering and Automation, 2018(4): 160-162. (in Chinese). doi: 10.3969/j.issn.1672-6413.2018.04.067 [29] ZHAO Li-ping, CHEN Hong-ren, YAO Yi-yong, et al. A new approach to improving the machining precision based on dynamic sensitivity analysis[J]. International Journal of Machine Tools and Manufacture, 2016, 102: 9-21. [30] LIN Y, SHEN Y. Modelling of five-axis machine tool metrology models using the matrix summation approach[J]. International Journal of Advanced Manufacture Technology, 2003, 21(4): 243-248. -






 点击查看大图
点击查看大图

计量
- 文章访问数: 947
- HTML全文浏览量: 193
- PDF下载量: 487
- 被引次数: 0
