

-
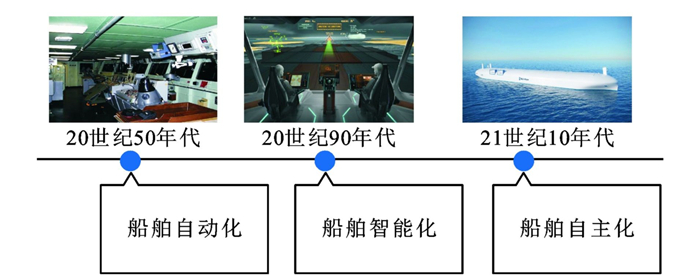
摘要: 梳理了自主船舶的发展历程, 明确了自主船舶的定义, 规范了自主船舶的中英文表述, 基于船舶自主化演变路径, 分析了船舶自动化、智能化和自主化的关系; 总结了当前国际上6家权威机构提出的自主水平分级标准, 分析了其分级依据的实质与局限性; 以具体的任务情景为对象, 参考《STCW公约》有关海员适任标准中规定的7项职能, 提出了一种基于航海实践的自主水平分级方法, 依据不同的水域条件、操作复杂程度、独立于人的干预程度等因素确定任务情景等级, 并通过标定方程的计算结果确定船舶整体自主水平; 以2艘搭载自主航行技术的测试船舶为例, 对比了不同机构的自主水平分级结果。研究结果表明: 自主水平分级依据的关键在于能否独立于人的干预完成相应的任务或实现相应的功能, 而不是取决于船舶自动化水平或决策地点; 基于航海实践的自主水平分级方法能够更为客观地反映船舶的自主水平, 有效避免了由于单一功能的自主实现导致船舶整体自主水平认定不准确的弊端, 该方法科学、合理。Abstract: The development history of autonomous ship was sorted out, its definition was clarified, and its Chinese and English expressions were normalized. The relationship among the ship's automation, intelligence and autonomy was discussed based on the evolution path of autonomy. The taxonomies of autonomy level of 6 authoritative institutions in the world were summarized, the essence and limitation of taxonomy basis were deeply analyzed. Taking the task scenarios as objects and referring to 7 functions of seafarers' standards of competency in the STCW Convention, a taxonomy method of autonomy levels based on navigation practice was proposed. The method identified the levels of task scenarios according to water condition, complexity of operation, and independence from human intervention, and the overall autonomy levels of the ship were determined by the calculation result of the calibration equation. Two test ships carrying autonomous navigation technology were taking as examples, the classification results of autonomy levels of different institutions were compared. Analysis result shows that the key to the taxonomy basis of autonomy level is whether the autonomous ship can independently complete the corresponding task or achieve the corresponding function from the human intervention, rather than depending on the ship automation level or decision-making location. The taxonomy method of autonomy levels based on the navigation practice can reflect the autonomy level of the ship more objectively, and effectively avoid the disadvantage of inaccurate identification of overall autonomy level of the ship due to the autonomous implement of a single function. Therefore, the proposed method is scientific and reasonable.
-
Key words:
- marine engineering /
- autonomous ship /
- autonomy level /
- autonomous evolution path /
- task scenario /
- navigation practice
-

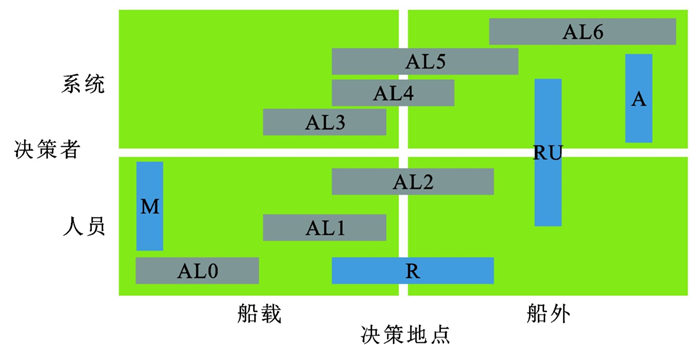
图 2 LR与DMA自主水平分级标准的关系
Figure 2. Relationship between LR and DMA of autonomy level taxonomy

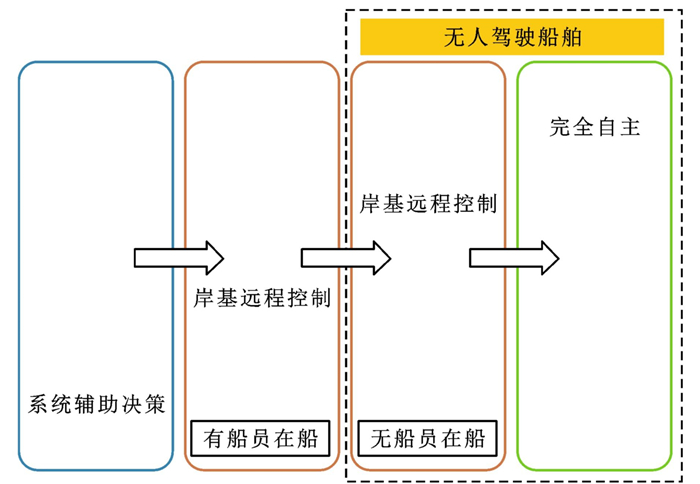
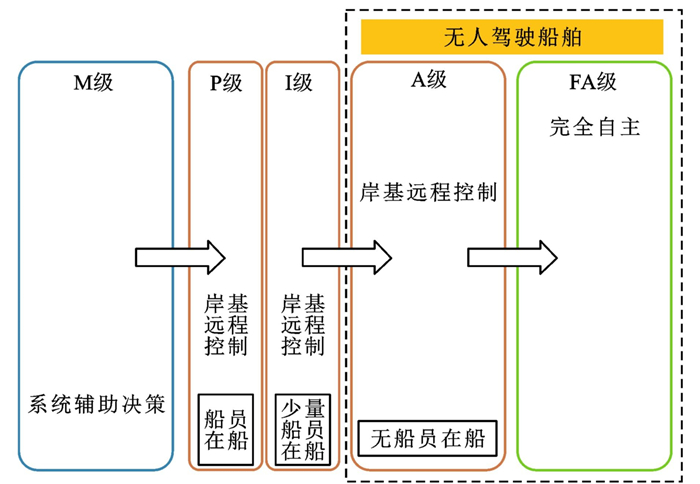
图 5 ALNP分级标准与自主船舶发展路线的关系
Figure 5. Relationship between taxonomy by ALNP and development route of autonomous ships
表 1 自主船舶的定义
Table 1. Definitions of autonomous ship
出处 时间 英文原文 中文译文 MUNIN[10] 2012年 Next generation modular control systems and communications technology will enable wireless monitoring and control functions both on and offboard. These will include advanced decision support systems to provide a capability to operate ships remotely under semi or fully autonomous control. 下一代模块化控制系统和通信技术在船载或船外将实现无线监控和控制功能, 包括先进的决策系统以提供在半自主或全自主控制下远程操纵船舶的能力。 Bertram[2] 2016年 An autonomous ship is a ship that “has systems based on automated software that may advice human operators, or at the highest level of autonomy replace human decision making and action”. 自主船舶是指“具有基于自动化软件的系统, 可以向操作人员提供建议或在最高自主等级中取代人的制定决策和采取行动”的船舶。 ABS[20] 2016年 Marine vessel with sensors, automated navigation, propulsion and auxiliary systems, with the decision logic to follow mission plans, sense the environment, adjust mission execution for the environment, and operate without human intervention. 配备传感器、自动导航、推进和辅助系统的船舶, 并具备遵循任务计划、感知环境、根据环境调整任务执行且无需人为干预的决策逻辑。 NFAS[21] 2017年 An autonomous ship is a ship, that has some level of automation and self-governance. 自主船舶是具有一定自动化和自治等级的船舶。 BV[22] 2017年 Ship having the same capabilities as those of a smart ship and including autonomous systems capable of making decisions and performing actions with or without human in the loop. An autonomous ship may be manned with a reduced crew or unmanned with or without supervision. 自主船舶具有与智能船舶相同的能力, 并且包括在有人或无人的情况下能够制定决策并执行行动的自主系统。自主船舶可以实现减少船员配备、无人驾驶或无人监督。 DMA[23] 2017年 Ships capable of providing—via automatic processes—decision-support or a possibility of taking over parts of or the entire human control and management of the ship, irrespective of whether the control is exerted from the ship or from somewhere else. 通过自动过程能够提供决策支持或可能接管的由部分或全部人员控制和管理的船舶, 而不论是从船上还是其他地方施加控制。 IMO 2018年 Maritime autonomous surface ship (MASS) is defined as a ship which, to a varying degree, can operate independent of human interaction. 海上自主水面船舶被定义为在不同程度下, 可以独立于人的干预的船舶。  下载: 导出CSV
下载: 导出CSV
表 2 LR自主水平分级标准
Table 2. Taxonomy of autonomy levels by LR
自主水平 描述 AL0 手动(无自主功能): 所有行动和决策均由手动执行, 即船员控制船舶所有行动。 AL1 船载决策支持: 控制人员执行所有在船操作, 但决策支持工具可以提供选项或以其他方式影响其选择的操作。 AL2 船载或岸基决策支持: 控制人员执行所有在船操作, 但决策支持工具可以提供选项或以其他方式影响其选择的操作; 数据可以由船上或船外的系统提供。 AL3 控制人员监督和授权执行: 由控制人员监督在船决策和行动的自主执行, 控制人员有权对高影响力决策进行干预; 数据可以由船上或船外的系统提供。 AL4 控制人员监督执行并有权干预: 由控制人员监督所有决策和行动的自主执行; 控制人员有权对高影响力决策进行干预。 AL5 受监督的自主: 由系统制定的决策和采取的行动很少受到监督或无监督。 AL6 完全自主: 由系统制定的决策和采取的行动不会受到监督。
下载: 导出CSV
表 3 NFAS自主船舶分类
Table 3. Classification of autonomous ships by NFAS
类别 描述 AAB 船舶手动驾驶, 船员可以立即干预正在进行的活动。 PUB 驾驶台无船员, 但船舶仅能在开阔水域或良好天气的情况下有限的时间运行; 船员在船, 遇到问题时可随时前往驾驶台。 PUS 驾驶台无船员, 船舶可长时间运行, 如在深水航道航行, 或在进港、离港阶段, 由登船队登船或护卫船抵进以控制船舶。 CUS 船舶专为全天候无人驾驶设计, 除非处于紧急情况, 否则船上无人被授权控制船舶。(注: 此阶段仍有可能有人在船, 如乘客或维修人员)
下载: 导出CSV
表 4 NFAS操作自主水平分级标准
Table 4. Taxonomy of operational autonomy levels by NFAS
操作自主水平 描述 决策支持 船员直接控制船舶操作, 并持续监督所有操作, 无自主功能。 自动化 船舶具有更先进自动化系统, 无需人工干预即可完成某些预定操作, 如动力定位或自动靠离泊。自动操作遵循预编程序执行, 发生任何意外事件或事件已完成将请求人工干预。船员或岸基控制中心(Shore Control Centre, SCC)可随时直接或远程控制。 受限自主 船舶在大多数情景可自主运行, 解决预定义选项的常见问题, 如避碰等。如果在限制范围内无法自主执行, 系统会请求人工干预。船员或SCC将保持持续监督, 并在系统请求时立即介入。 完全自主 船舶自主处理所有情景, 将不存在船员和SCC。
下载: 导出CSV
表 5 NFAS自主水平分级标准
Table 5. Taxonomy of autonomy levels by NFAS
自主水平 有人驾驶台 无人驾驶台(有船员在船) 无人驾驶台(无船员在船) AAB/PUB PUB PUS/CUS 决策支持 直接控制(无自主) 远程控制 远程控制 自动化 自动化驾驶台 自动化船舶 自动化控制 受限自主 受限自主 受限自主 完全自主 完全自主
下载: 导出CSV
表 6 DMA自主水平分级标准
Table 6. Taxonomy of autonomy levels by DMA
自主等级 描述 M 配备自动系统和辅助决策的手动操纵船舶 R 有船员在船的远程控制船舶 RU 无船员在船的远程控制船舶 A 完全自主船舶
下载: 导出CSV
表 7 MASRWG自主水平分级标准
Table 7. Taxonomy of autonomy levels by MASRWG
自主等级 描述 0 载人: 船舶由船上操作人员控制。 1 操作: 在操作控制下, 操作人员控制所有认知功能。操作人员通过无线电或电缆与无人驾驶船舶直接相连, 并制定所有决策, 指导和控制所有任务功能。 2 决策: 在直接控制下, 无人驾驶船舶具有一定程度的推理和响应能力。系统可以感知环境、报告船舶状态, 并向操作人员提供行动建议, 但由操作人员授权决策。无人驾驶船舶仅能在命令或允许的情况下采取行动。 3 委托: 无人驾驶船舶被授权执行某些功能。系统可以感知环境、报告船舶状态、定义行动和报告意图。在一定时间内, 操作人员可以否决系统的意图, 否则船舶将采取相应的行动。无人驾驶船舶具有自主决策的能力, 并与操作人员共享决策。 4 监控: 无人驾驶船舶将感知环境、报告状态、制定决策、采取行动和报告行动, 操作人员可以对事件进行监控。 5 自主: 无人驾驶船舶将感知环境、报告状态、制定决策、采取行动, 并在系统能力和限制的范围内提供最大程度的独立性和自我判断。船载系统在由其确定的情况下调用自主功能, 而无需通知其他的外部单位或操作人员。
下载: 导出CSV
表 8 BV自主水平分级标准
Table 8. Taxonomy of autonomy levels by BV
自主等级 描述 0 人工操作: 人工制定所有决策和控制所有功能。 1 人工决策: 系统提供决策支持, 人工制定决策并采取行动。 2 人工授权: 系统决策, 但需要人工授权执行。在一定时间内, 可以进行人工干预。 3 人工监督: 系统无需等待人工授权即可决策、执行。但人员会被告知系统的决策和行动。 4 完全自主: 系统无需通知控制人员即可进行决策、执行。仅在紧急情况下才会通知人员。
下载: 导出CSV
表 9 自主船舶任务情景
Table 9. Task scenarios of autonomous ships
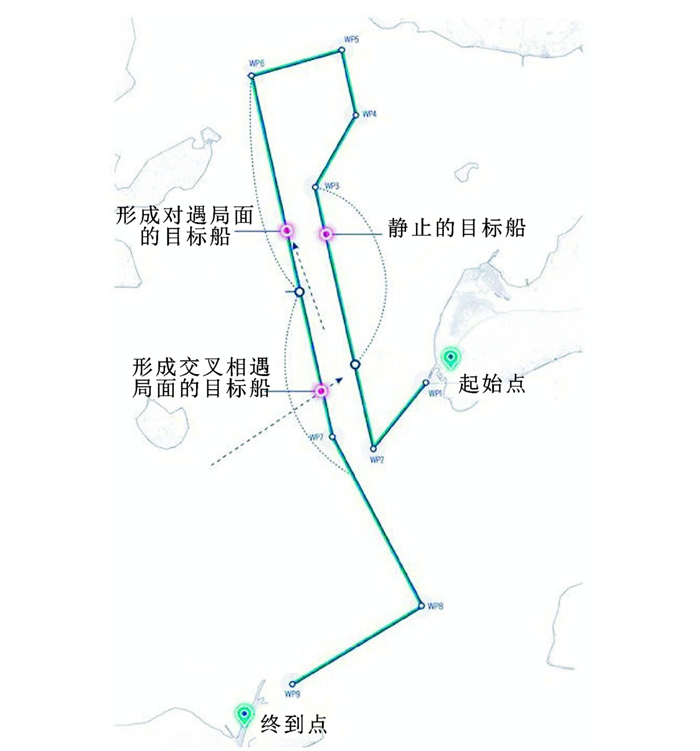
航行 货物装卸和积载 维护和修理 应急操作和应急处置 自主导航 自主装卸 无线电/网络通信自主保持 设备和系统发生故障时的自主应急操作 自主保持船舶姿态 自主操纵 开敞水域 受限水域 软件自主维护 港口水域 避台操纵 靠离泊 自主避碰 两船避碰 不包括渔船、失控船和受限船 自主积载 硬件自主维护 发生海上事故时的自主应急处置 仅包括充分配备AIS等船载设备的渔船、失控船和受限船 包括未充分配备AIS等船载设备的渔船、失控船和受限船 软件自主维修 多船避碰 不包括渔船、失控船和受限船 仅包括充分配备AIS等船载设备的渔船、失控船和受限船 包括未充分配备AIS等船载设备的渔船、失控船和受限船 硬件自主维修 避免不协调的避碰行动 背离规则的避碰行动
下载: 导出CSV
表 10 任务情景等级划分
Table 10. Classification for levels of task scenarios
dij 1 2 3 4 5 6 7 1 自主导航 自主操纵(开敞水域) 自主避碰(两船避碰, 不包括渔船、失控船和受限船) 无线电/网络通信自主保持 软件自主维护 2 自主保持船舶姿态 自主操纵(受限水域) 自主操纵(港口水域) 自主避碰(两船避碰, 仅包括充分配备AIS等船载设备的渔船、失控船和受限船) 自主避碰(多船避碰, 不包括渔船、失控船和受限船) 自主积载 硬件自主维护 3 自主操纵(避台操纵) 自主操纵(靠离泊) 自主避碰(两船避碰, 包括未充分配备AIS等船载设备的渔船、失控船和受限船) 自主避碰(多船避碰, 仅包括充分配备AIS等船载设备的渔船、失控船和受限船) 自主装卸 软件自主维修 4 避免不协调的避碰行动 背离规则的避碰行动 自主避碰(多船避碰, 包括未充分配备AIS等船载设备的渔船、失控船和受限船) 硬件自主维修 设备和系统发生故障时的自主应急操作 发生海上事故时的自主应急处置
下载: 导出CSV
表 11 “Folgefonn”号自主水平分级结果
Table 11. Classification results for autonomy level of Folgefonn Ferry
方法 ALNP LR NFAS DMA MASRWG BV IMO 分级结果 M AL3 自动化驾驶台 M 0 2 M
下载: 导出CSV
表 12 “Falco”号渡轮自主水平分级结果
Table 12. Classification results for autonomy level of Falco Ferry
方法 ALNP LR NFAS DMA MASRWG BV IMO 分级结果 P AL4 受限自主 A 5 3 A
下载: 导出CSV
-
[1] WRÓBEL K, MONTEWKA J, KUJALA P. Towards the assessment of potential impact of unmanned vessels on maritime transportation safety[J]. Reliability Engineering and System Safety, 2017, 165: 155-169. doi: 10.1016/j.ress.2017.03.029 [2] BERTRAM V. Autonomous ship technology-smart for sure, unmanned maybe[C]∥The Royal Institution of Naval Architects. RINA International Conference on Smart Ship Technology. London: The Royal Institution of Naval Architects, 2016: 13-16. [3] CAMPBELL S, NAEEM W, IRWIN G W. A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres[J]. Annual Reviews in Control, 2012, 36(2): 267-283. doi: 10.1016/j.arcontrol.2012.09.008 [4] BERTRAM V. Unmanned surface vehicles—a survey[J]. Skibsteknisk Selskab, 2008, 1: 1-14. [5] MANLEY J E. Unmanned surface vehicles, 15 years of development[C]//IEEE. OCEANS 2008. New York: IEEE, 2008: 1-4. [6] LIU Zhi-xiang, ZHANG You-min, YU Xiang, et al. Unmanned surface vehicles: an overview of developments and challenges[J]. Annual Reviews in Control, 2016, 41: 71-93. doi: 10.1016/j.arcontrol.2016.04.018 [7] 侯馨光. 21世纪船舶自动化展望[J]. 上海造船, 1997(2): 38-41. https://www.cnki.com.cn/Article/CJFDTOTAL-SHZC199702008.htmHOU Xin-guang. An outlook on marine automation in the 21st century[J]. Shanghai Shipbuilding, 1997(2): 38-41. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-SHZC199702008.htm [8] 郭廷结. 国外船舶自动化技术概述[J]. 国外自动化, 1980(4): 24-30, 60. https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR198004005.htmGUO Ting-jie. Overview of automation technology towards foreign ships[J]. Automation Abroad, 1980(4): 24-30, 60. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR198004005.htm [9] 严新平. 智能船舶的研究现状与发展趋势[J]. 交通与港航, 2016(1): 25-28. https://www.cnki.com.cn/Article/CJFDTOTAL-CSGS201601008.htmYAN Xin-ping. Research status and development trends of intelligent ships[J]. Communication and Shipping, 2016(1): 25-28. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-CSGS201601008.htm [10] BURMEISTER H C, BRUHN W, R∅DSETH ∅ J, et al. Autonomous unmanned merchant vessel and its contribution towards the e-Navigation implementation: the MUNIN perspective[J]. International Journal of e-Navigation and Maritime Economy, 2014, 1: 1-13. doi: 10.1016/j.enavi.2014.12.002 [11] Rolls-Royce. Remote and autonomous ships—the next steps[R]. London: Rolls-Royce, 2016. [12] 吴兆麟. 船舶驾驶自动化与航海智能化[J]. 中国海事, 2017(8): 16-19. https://www.cnki.com.cn/Article/CJFDTOTAL-HSZG201708010.htmWU Zhao-lin. Ship driving automation and navigation intelligence[J]. China Maritime Safety, 2017(8): 16-19. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HSZG201708010.htm [13] Maritime Safety Committee. Report of the Maritime Safety Committee on its ninety-eighth session[R]. London: IMO, 2017. [14] Maritime Safety Committee. Final report: analysis of regulatory barriers to the use of autonomous ships submitted by Denmark[R]. London: IMO, 2018. [15] Maritime Safety Committee. Report of the Maritime Safety Committee on its ninety-ninth session[R]. London: IMO, 2018. [16] Maritime Safety Committee. Report of the Maritime Safety Committee on its one hundredth session[R]. London: IMO, 2019. [17] Maritime Safety Committee. Report of the Maritime Safety Committee on its one hundredth session(annexes 1-16)[R]. London: IMO, 2019. [18] Lloyd's Register. Maritime Safety Committee one hundred and first session (MSC 101) summary report[R]. London: Lloyd's Register, 2019. [19] Bureau Veritas. Major outcomes of the 101st session of the maritime safety committee[R]. Paris: Bureau Veritas, 2019. [20] JORGENSEN J. Autonomous vessels: ABS' classification perspective[R]. Spring: American Bureau of Shipping, 2016. [21] R∅DSETH ∅ J, NORDAHL H. Definitions for autonomous merchant ships[R]. Trondheim: Norwegian Forum for Autonomous Ships, 2017. [22] Bureau Veritas. Guidelines for autonomous shipping[R]. Paris: Bureau Veritas, 2017. [23] Danish Maritime Authority. Analysis of regulatory barriers to the use of autonomous ships[R]. Kors⌀r: Danish Maritime Authority, 2017. [24] R∅DSETH ∅ J. From concept to reality: unmanned merchant ship research in Norway[C]//IEEE. 2017 IEEE OES International Symposium on Underwater Technology. New York: IEEE, 2017: 1-10. [25] R∅DSETH ∅ J, NORDAHL H, HOEM Å. Characterization of Autonomy in Merchant Ships[C]//IEEE. 2018 OCEANS-MTS/IEEE Kobe Techno-Oceans. New York: IEEE, 2018: 1-7. [26] Lloyd's Register. Cyber-enabled ships shipright procedure—autonomous ships[R]. London: Lloyd's Register, 2016. [27] WRÓBEL K, MONTEWKA J, KUJALA P. Towards the development of a system-theoretic model for safety assessment of autonomous merchant vessels[J]. Reliability Engineering and System Safety, 2018, 178: 209-224. [28] WRÓBEL K, MONTEWKA J, KUJALA P. System-theoretic approach to safety of remotely-controlled merchant vessel[J]. Ocean Engineering, 2018, 152: 334-345. [29] Lloyd's Register. LR code for unmanned marine systems[R]. London: Lloyd's Register, 2017. [30] MASRWG. Maritime autonomous surface ships UK code of practice[R]. Southampton: MASRWG, 2017. [31] 戴厚兴, 吴兆麟. 能见度不良天气下海上交通安全风险预警系统[J]. 交通运输工程学报, 2018, 18(5): 195-206. http://transport.chd.edu.cn/article/id/201805019DAI Hou-xing, WU Zhao-lin. Pre-warning system of maritime traffic safety risk in restricted visibility weather[J]. Journal of Traffic and Transportation Engineering, 2018, 18(5): 195-206. (in Chinese). http://transport.chd.edu.cn/article/id/201805019 [32] VAGIA M, TRANSETH A A, FJERDINGEN S A. A literature review on the levels of automation during the years. What are the different taxonomies that have been proposed?[J]. Applied Ergonomics, 2016, 53: 190-202. [33] ZHOU Xiang-yu, LIU Zheng-jiang, WU Zhao-lin, et al. Quantitative processing of situation awareness for autonomous ships navigation[J]. The International Journal on Marine Navigation and Safety of Sea Transportation, 2019, 13(1): 25-31. [34] PORATHE T, HOEM Å, R∅DSETH ∅ J, et al. At least as safe as manned shipping?Autonomous shipping, safety and "human error"[C]//HAUGEN S, BARROS A, VAN GULIJK C, et al. Safety and Reliability—Safe Societies in a Changing World. London: CRC Press, 2018: 417-425. -



 点击查看大图
点击查看大图
计量
- 文章访问数: 1235
- HTML全文浏览量: 183
- PDF下载量: 607
- 被引次数: 0
