

Grey box identification modeling for ship maneuverability based on single parameter self-adjustable RM-GO-LSVR
-
摘要: 为实现舵角小、试验数据少条件下船舶操纵辨识建模, 提出了一种船舶操纵运动灰箱模型; 搜集水动力系数已知的船舶运动数学模型作为备选参考模型(RM), 计算被辨识船舶与备选RM的相关系数, 并以此筛选合适的RM; 运用相似准则将观测数据映射到RM的输入值域, 建立被辨识船舶与RM的运动关联, 获得了RM的加速度项, 并使用线性支持向量回归(LSVR)机补偿被辨识船舶和RM加速度项间的误差; 分析了机理模型, 设计了合适的LSVR输入项, 使用全局优化(GO)算法自动调节了LSVR的不敏感边界参数; 基于自航模试验数据训练了灰箱模型, 并与约束模试验(CMT)结果和计算流体力学结果比较, 验证了灰箱模型的泛化能力和预报精度。研究结果表明: 在20°船艏向、20°舵角Z形试验预报中, 灰箱模型所得第一超越角精度至少比CMT、虚拟约束模试验(VCMT)和RM方法所得结果高1°, 灰箱模型所得第二超越角精度至少比CMT和VCMT所得结果高0.4°; 在35°舵角旋回试验预报中, 灰箱模型所得进距精度至少比CMT、VCMT、数值循环水槽试验(NCWCT)和RM方法所得结果高1%, 灰箱模型所得战术直径精度比CMT所得结果低4%, 比NCWCT所得结果高10%;RM方法有助于灰箱辨识建模, GO算法能够优化LSVR的不敏感边界参数, 建立的单参数自调节灰箱辩识建模方法能够实现小舵角、少数试验条件下的船舶操纵辨识建模。Abstract: To realize the identification modeling of ship maneuverability when the rudder angle is small and the test data were less, a grey box model for the ship maneuverability motion was put forward. The mathematical ship motion models with foregone hydrodynamic coefficients were collected as the alternative reference models(RM). The correlation coefficients between the identified ship and the alternative RMs were calculated to select the appropriate RM. The similitude regulation was applied to map the measurement data to the input range of RM and to build the motion relationship between the identified ship and the RM, and the accelerations of RM were acquired. The linear support vector regression(LSVR) machine was used to compensate the acceleration error between the identified ship and the RM. The mechanism model was analyzed, the suitable LSVR inputs were designed, and the global optimization(GO) algorithm was used to automatically adjust the insensitive band parameter of LSVR. The grey box model was trained by the data of free running model test, and the results were compared with those of the captive model test(CMT) and the computational fluid dynamics to validate the generalization ability and prediction accuracy. Research result shows that for the zigzag test with 20° heading angle and 20° rudder angle, the prediction accuracy of the first overshoot angle from the grey box model is at least 1° higher than those of CMT, virtual captive model test(VCMT) and RM method. The prediction accuracy of the second overshoot angle from the grey box model is at least 0.4° higher than those of CMT and VCMT. For the turning circle test with 35° rudder angle, the prediction accuracy of advance from the grey box model is at least 1% higher than those of CMT, VCMT, numerical circulating water channel test(NCWCT) and RM method. The prediction accuracy of tactical diameter from the grey box model is 4% less than that of CMT, and is 10% higher than that of NCWCT. The RM method is benefited for the grey box modeling. The GO algorithm can optimize the insensitive band parameters of LSVR. The established grey box method with self-adjustable single parameter can realize the identification modeling for the ship maneuverability with small rudder angle and less test data.
-

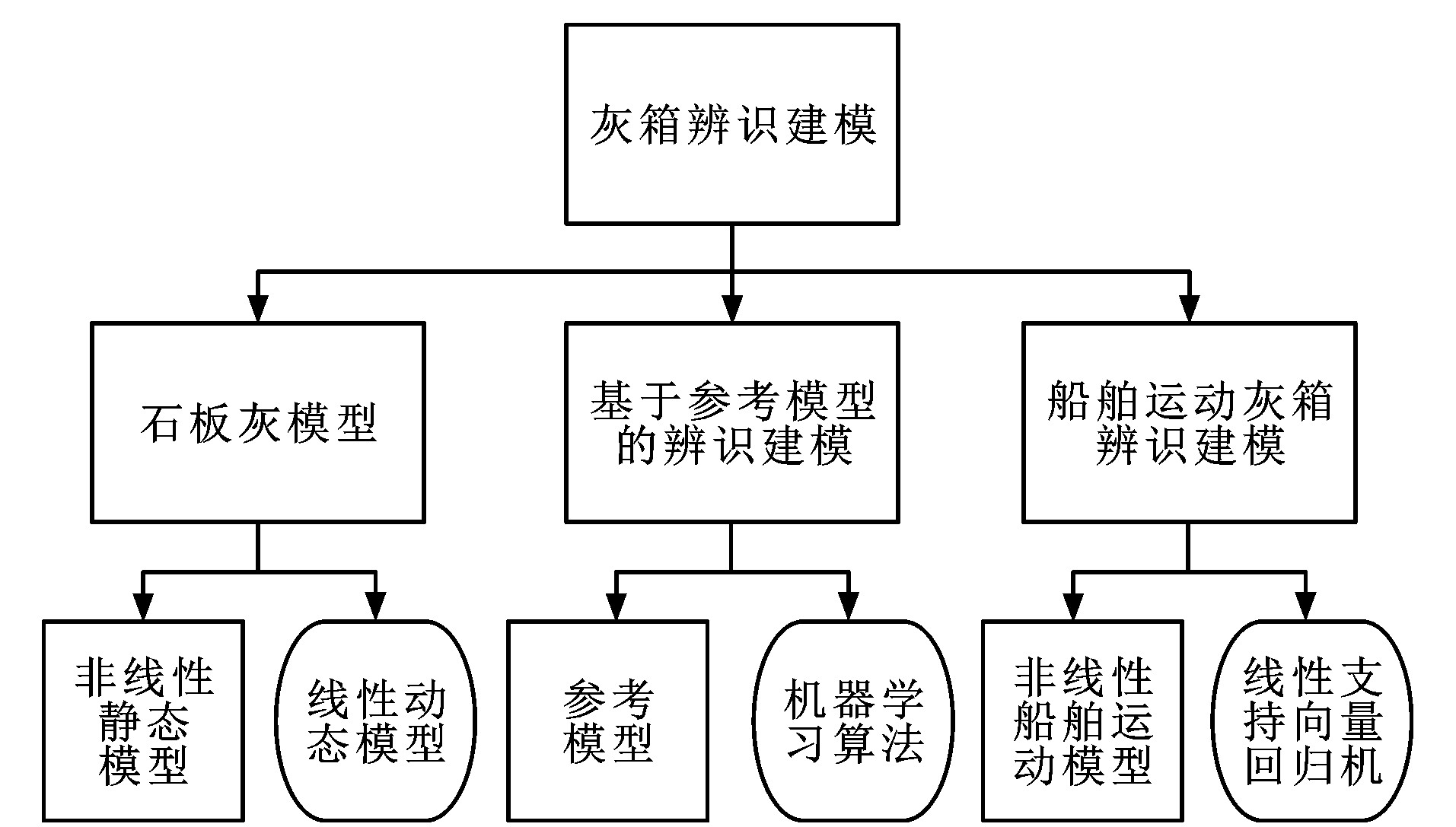
图 2 石板灰模型、RM以及灰箱辨识建模对比
Figure 2. Comparison among slate-grey model, RM and grey box identification modeling

图 3 基于RM-GO-LSVR的船舶操纵灰箱辨识建模算法及其单参数自调节优化流程
Figure 3. Grey box identification modeling algorithm for ship maneuverability based on RM-GO-LSVR and optimization flow for self-adjustable single parameter

图 5 迭代过程中LSVR不敏感边界参数和相关系数
Figure 5. Insensitive band parameters of LSVR and correlation coefficients during iterations

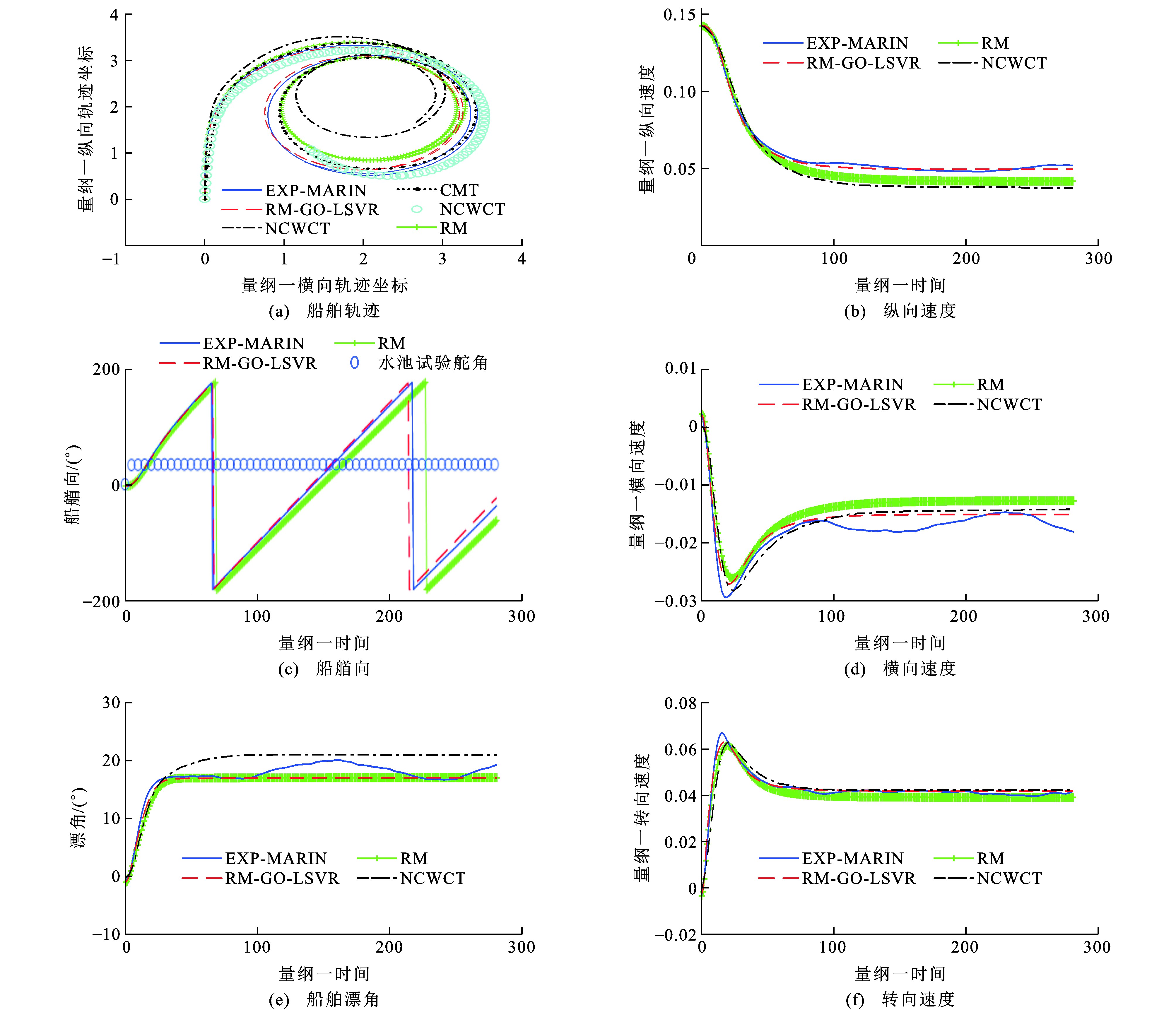
图 7 35°舵角旋回试验预报结果
Figure 7. Prediction results of turning circle test with 35° rudder angle
表 1 KVLCC2船舶的尺度
Table 1. Dimensions of ship KVLCC2
主尺度 实船 船模 缩尺比 1.000 45.714 两柱间长/m 320.0 7.0 吃水/m 20.800 0.455 方形系数 0.809 8 0.809 8 最大转舵速率/(°·s-1) 2.34 15.80 服务航速/kn 15.500 1.179  下载: 导出CSV
下载: 导出CSV
表 2 KVLCC2船舶辨识建模的训练和验证试验
Table 2. Training and validation tests of ship KVLCC2 identification modeling
试验类型 舵角/(°) 船艏向/(°) 左舵/右舵 采样数 Z形试验1 10 10 右舵 520 Z形试验2 10 10 左舵 565 Z形试验3 20 20 右舵 606 Z形试验4 20 20 左舵 684 旋回试验 35 右舵 1 610
下载: 导出CSV
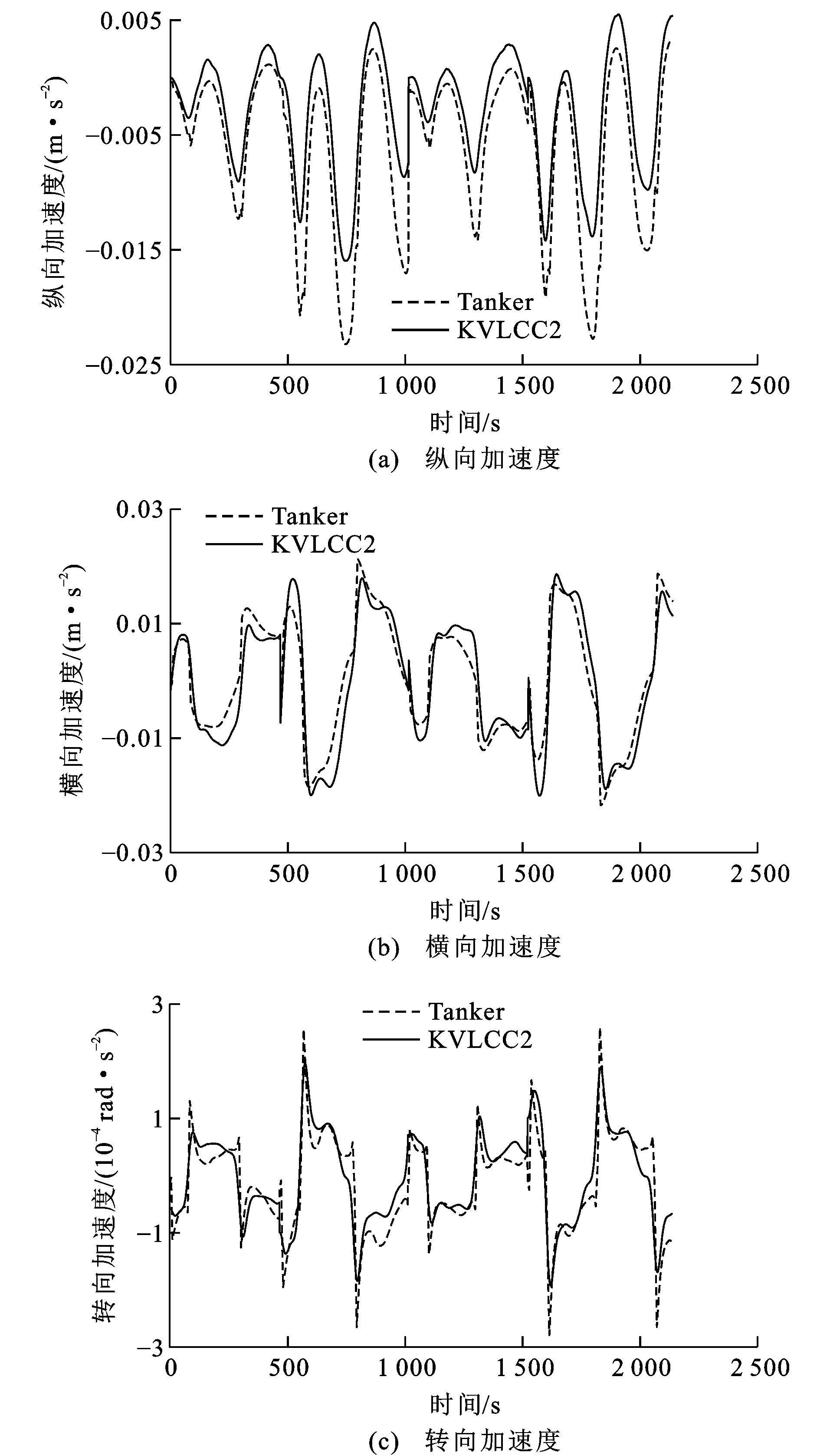
表 4 KVLCC2船舶和备选RM的主尺度
Table 4. Main dimensions of ship KVLCC2 and alternative RMs
模型 KVLCC2 Mariner Tanker SR108 PCC Cb 0.898 0.590 0.830 0.562 0.547 L/B 5.517 6.952 6.389 6.890 5.590 B/T 1.442 3.100 2.584 2.988 3.926 L/V0/s 40.130 20.853 37.035 14.085 18.000 Ad/(LT) 1/48.69 1/83.05 1/61 1/45.8 1/39.83
下载: 导出CSV
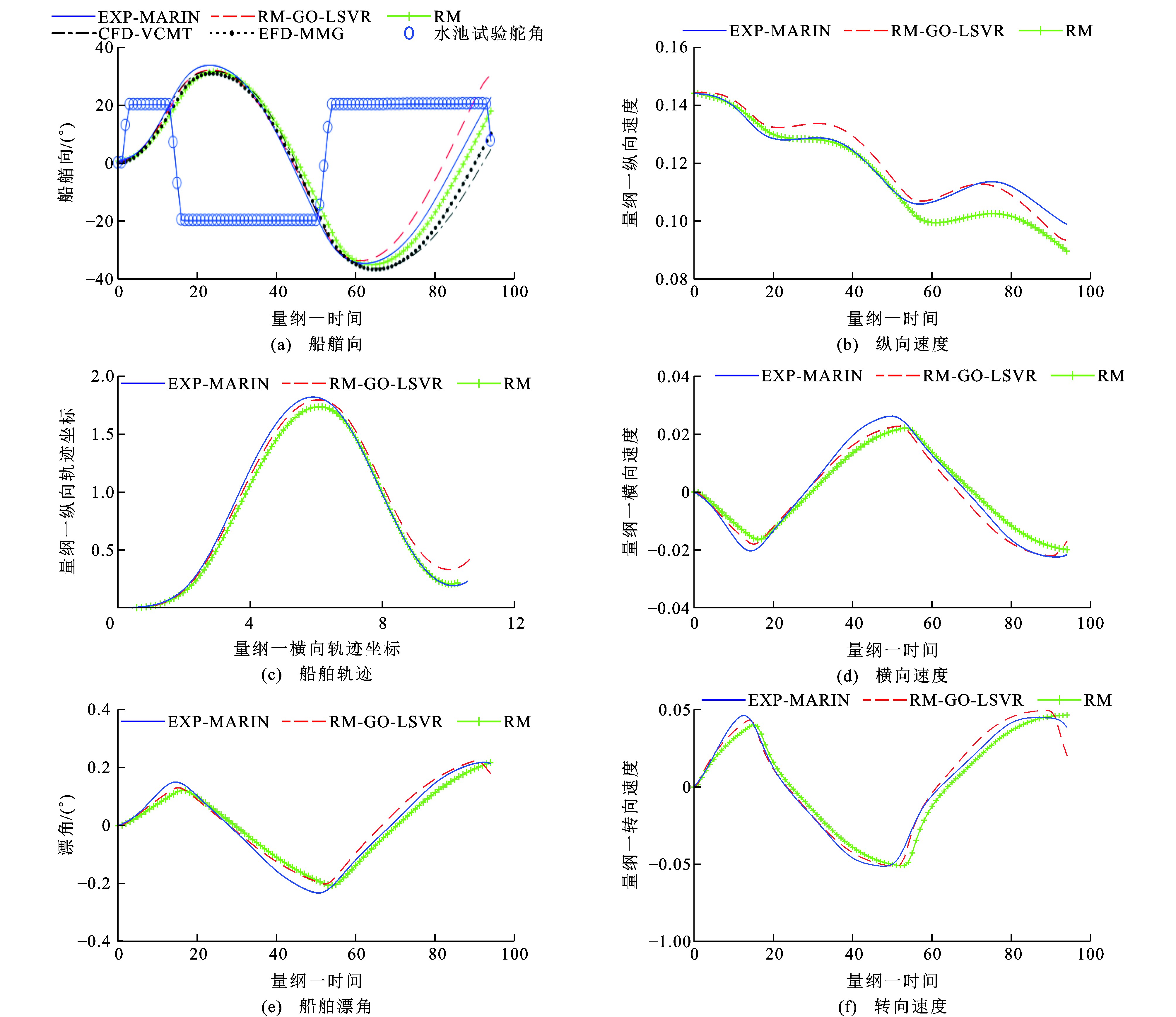
表 5 不同方法预报的20°/20° Z形试验超越角比较
Table 5. Comparison of predicted overshoot angles in 20°/20° zigzag test among different methods
(°) 方法 EXP-MARIN RM-GO-LSVR CMT VCMT RM 第一超越角 13.8 12.7 10.9 11.7 11.5 第二超越角 14.9 13.7 17.0 16.5 15.3
下载: 导出CSV
表 6 不同方法预报的35°舵角旋回试验进距和战术直径比较
Table 6. Comparison of predicted advances and tactical diameters in turning circle test with 35° rudder angle among different methods
方法 EXP-MARIN RM-GO-LSVR NCWCT CMT VCMT RM 量纲一进距 3.25 3.22 3.63 3.31 3.12 3.33 量纲一战术直径 3.34 3.20 2.87 3.36 3.40 3.22
下载: 导出CSV
-
[1] Maritime Safety Committee. Proposal for a classification scheme for degrees of autonomy[R]. London: IMO, 2018. [2] TSOU M C. Multi-target collision avoidance route planning under an ECDIS framework[J]. Ocean Engineering, 2016, 121: 268-278. doi: 10.1016/j.oceaneng.2016.05.040 [3] Manoeuvring Committee. Final report and recommendations to the 25th ITTC[R]. Lyngby: ITTC, 2008. [4] GUO Hai-peng, ZOU Zao-jian. System-based investigation on 4-DOF ship maneuvering with hydrodynamic derivatives determined by RANS simulation of captive model tests[J]. Applied Ocean Research, 2017, 68: 11-25. doi: 10.1016/j.apor.2017.08.006 [5] ZHANG Guo-qing, ZHANG Xian-kun, PANG Hong-shuai. Multi-innovation auto-constructed least squares identification for 4 DOF ship maneuvering modelling with full-scale trial data[J]. ISA Transactions, 2015, 58: 186-195. doi: 10.1016/j.isatra.2015.04.004 [6] ABKOWITZ M A. Measurement of hydrodynamic characteristics from ship maneuvering trials by system identification[J]. SNAME Transactions, 1980, 88: 283-318. [7] LUO Wei-lin, ZOU Zao-jian. Identification of response models of ship maneuvering motion using support vector machines[J]. Journal of Ship Mechanics, 2007, 11(6): 832-838. [8] KÄLLSTRÖM C, ÅSTRÖM K J. Identification and modelling of ship dynamics[R]. Lund: Lund University, 1972. [9] YOON H K, RHEE K P. Identification of hydrodynamic coefficients in ship maneuvering equations of motion by estimation-before-modeling technique[J]. Ocean Engineering, 2003, 30(18): 2379-2404. doi: 10.1016/S0029-8018(03)00106-9 [10] SUTULO S, GUEDES SOARES C. An algorithm for offline identification of ship maneuvering mathematical models from free-running tests[J]. Ocean Engineering, 2014, 79: 10-25. doi: 10.1016/j.oceaneng.2014.01.007 [11] HADDARA M R, WANG Y. Parametric identification of maneuvering models for ships[J]. International Shipbuilding Progress, 1999, 46(445): 5-27. [12] WANG Ning, ER M J, HAN Min. Large tanker motion model identification using generalized ellipsoidal basis function-based fuzzy neural networks[J]. IEEE Transactions on Cybernetics, 2015, 45(12): 2732-2743. doi: 10.1109/TCYB.2014.2382679 [13] HESS D, FALLER W. Simulation of ship maneuvers using recursive neural networks[C]//National Academies Press. Twenty-third Symposium on Naval Hydrodynamics. Washington DC: National Academies Press, 2000: 223-242. [14] BAI Wei-wei, REN Jun-sheng, LI Tie-shan. Modified genetic optimization-based locally weighted learning identification modeling of ship maneuvering with full scale trial[J]. Future Generation Computer Systems, 2018, 93: 1036-1045. [15] ZHU Man, HAHN A, WEN Yuan-qiao, et al. Identification-based simplified model of large container ships using support vector machines and artificial bee colony algorithm[J]. Applied Ocean Research, 2017, 68: 249-261. doi: 10.1016/j.apor.2017.09.006 [16] 王雪刚, 邹早建, 任如意, 等. 基于支持向量机的四自由度船舶操纵运动黑箱建模[J]. 中国造船, 2014, 55(3): 147-155. doi: 10.3969/j.issn.1000-4882.2014.03.017WANG Xue-gang, ZOU Zao-jian, REN Ru-yi, et al. Black-box modeling of ship maneuvering motion in 4 degrees of freedom based on support vector machines[J]. Shipbuilding of China, 2014, 55(3): 147-155. (in Chinese). doi: 10.3969/j.issn.1000-4882.2014.03.017 [17] IMO. International convention for safety of life at sea[R]. London: IMO, 2018. [18] Sub-Committee on Ship Design and Construction. Unified interpretations of SOLAS regulations ii-1/29.3 and ii-1/29.4[R]. London: IMO, 2018. [19] PÉREZ F L, CLEMENTE J A. The influence of some ship parameters on maneuverability studied at the design stage[J]. Ocean Engineering, 2007, 34(3/4): 518-525. [20] ABKOWITZ M A. Lectures on ship hydrodynamics steering and maneuverability[R]. Lyngby: SSPA, 1964. [21] LJUNG L. Perspectives on system identification[J]. Annual Reviews in Control, 2008, 34(1): 1-12. [22] JAFARI A H, HAGAN M T. Application of new training methods for neural model reference control[J]. Engineering Applications of Artificial Intelligence, 2018, 74: 312-321. doi: 10.1016/j.engappai.2018.07.005 [23] LIU Jia-lun, HEKKENBERG R, QUADVLIEG F, et al. An integrated empirical maneuvering model for inland vessels[J]. Ocean Engineering, 2017, 137: 287-308. doi: 10.1016/j.oceaneng.2017.04.008 [24] KIJIMA K, TOSHIYUKI K, YASUAKI N, et al. On the maneuvering performance of ship with the parameter of loading condition[J]. Journal of the Society of Naval Architects of Japan, 1990, 168: 141-148. [25] TANVEER M, MANGAL M, AHMAD I, et al. One norm linear programming support vector regression[J]. Neurocomputing, 2016, 173: 1508-1518. doi: 10.1016/j.neucom.2015.09.024 [26] SNAM E. Nomenclature for treating the motion of a submerged body through a fluid[R]. New York: SNAME, 1950. [27] 王雪刚, 邹早建. 基于果蝇优化算法的支持向量机参数优化在船舶操纵预报中的应用[J]. 上海交通大学学报, 2013, 47(6): 884-888. https://www.cnki.com.cn/Article/CJFDTOTAL-SHJT201306006.htmWANG Xue-gang, ZOU Zao-jian. FOA-based SVM parameter optimization and its application in ship manoeuvering prediction[J]. Journal of Shanghai Jiao Tong University, 2013, 47(6): 884-888. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-SHJT201306006.htm [28] LIU Sheng, SONG Jia, LI Bing, et al. Identification of ship steering dynamics based on ACA-SVR[C]//IEEE. International conference on Mechatronics and Automation. New York: IEEE, 2008: 514-519. [29] UGRAY Z, LASDON L, PLUMMER J, et al. Scatter search and local NLP solvers: a multistart framework for global optimization[J]. INFORMS Journal on Computing, 2007, 19(3): 328-340. doi: 10.1287/ijoc.1060.0175 [30] NORRBIN N H. Theory and observations on the use of a mathematical model for ship maneuvering in deep and confined waters[R]. Göteborg: SSPA, 1970. [31] BISHOP R E D, PARKINSON A G. On the planar motion mechanism used in ship model testing[J]. Philosophical Transactions of the Royal Society A: Mathematical Physical and Engineering Sciences, 1970, 266: 35-61. [32] VAN BERLEKOM W B, GODDARD T A. Maneuvering of large tankers[C]//SNAME. The Annual Meeting of SNAME. New York: SNAME, 1972: 264-298. [33] YOSHIMURA Y, MASUMOTO Y. Hydrodynamic force database with medium high speed merchant ships including fishing vessels and investigation into a maneuvering prediction method[J]. Journal of the Society of Naval Architects of Japan, 2011, 14: 63-73. [34] SUNG Y J, PARK S H. Prediction of ship maneuvering performance based on virtual captive model tests[J]. Journal of the Society of Naval Architects of Korea, 2015, 52(5): 407-417. doi: 10.3744/SNAK.2015.52.5.407 [35] YASUKAWA H, YOSHIMURA Y. Introduction of MMG standard method for ship maneuvering predictions[J]. Journal of Marine Science and Technology, 2015, 20: 37-52. doi: 10.1007/s00773-014-0293-y [36] LIU Han, MA Ning, GU Xie-chong. Maneuvering prediction of a VLCC model based on CFD simulation for PMM tests by using a circulating water channel[C]∥ASME. The 34th International Conference on Ocean, Offshore and Arctic Engineering. St John's Newfoundland: ASME, 2015: 41548-41545. -



 点击查看大图
点击查看大图
计量
- 文章访问数: 740
- HTML全文浏览量: 166
- PDF下载量: 335
- 被引次数: 0
