

Dynamic trajectory planning and tracking control for lane change of intelligent vehicle based on trajectory preview
-
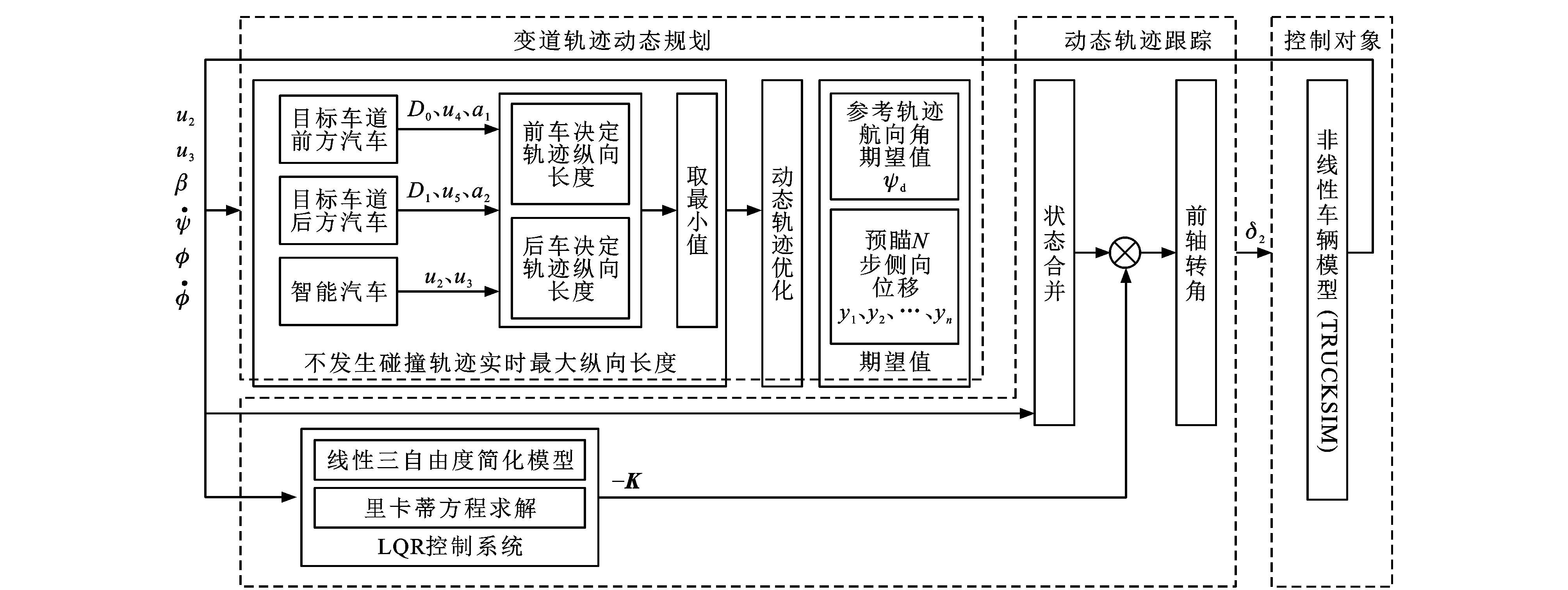
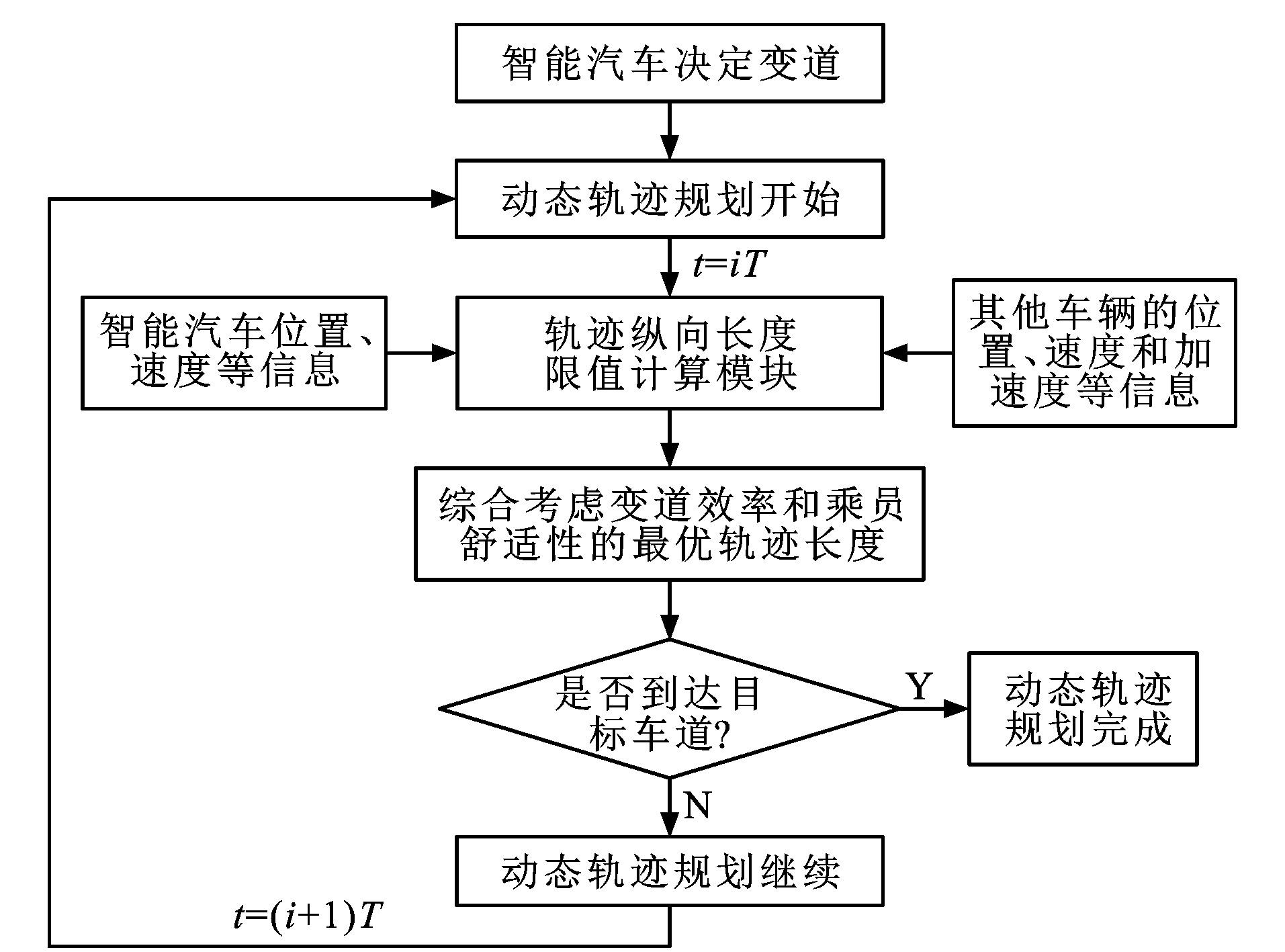
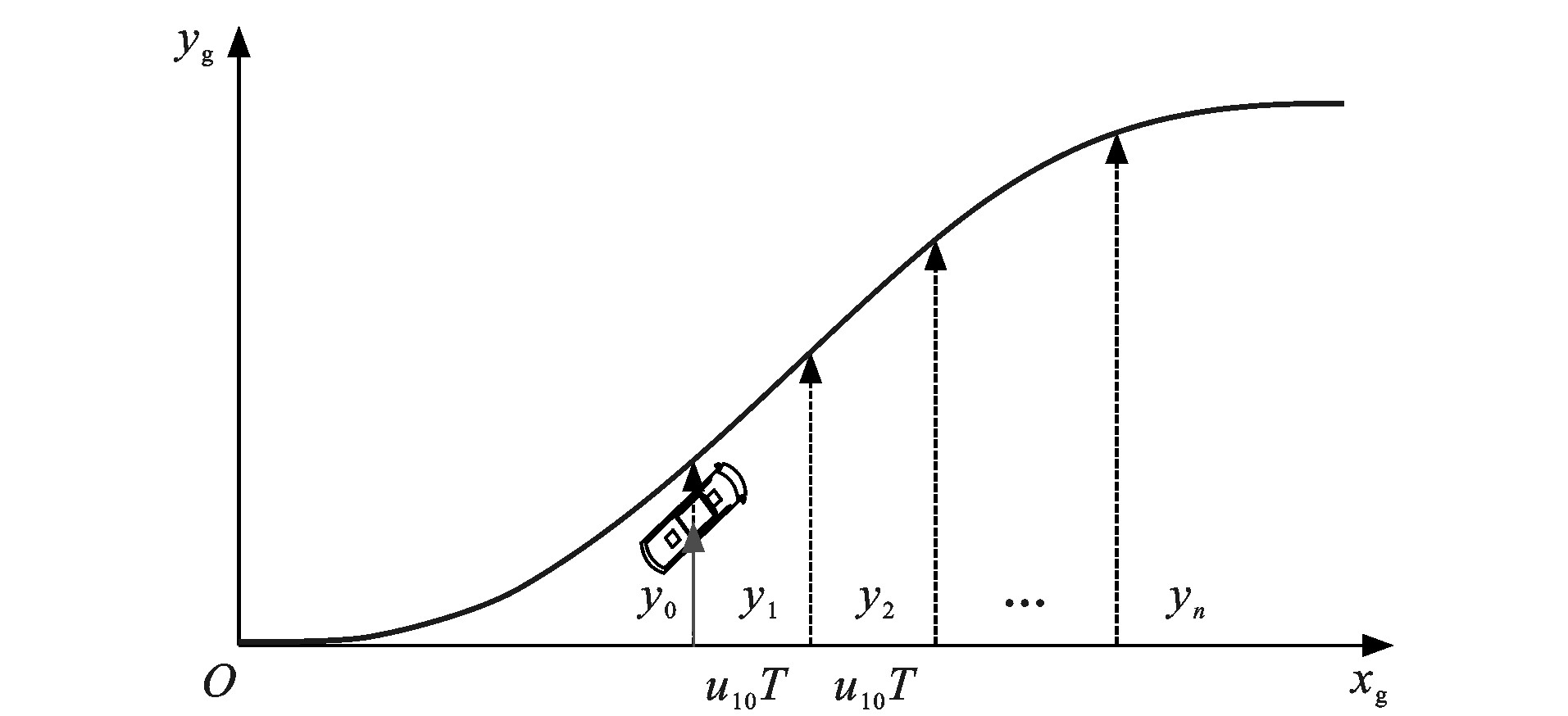
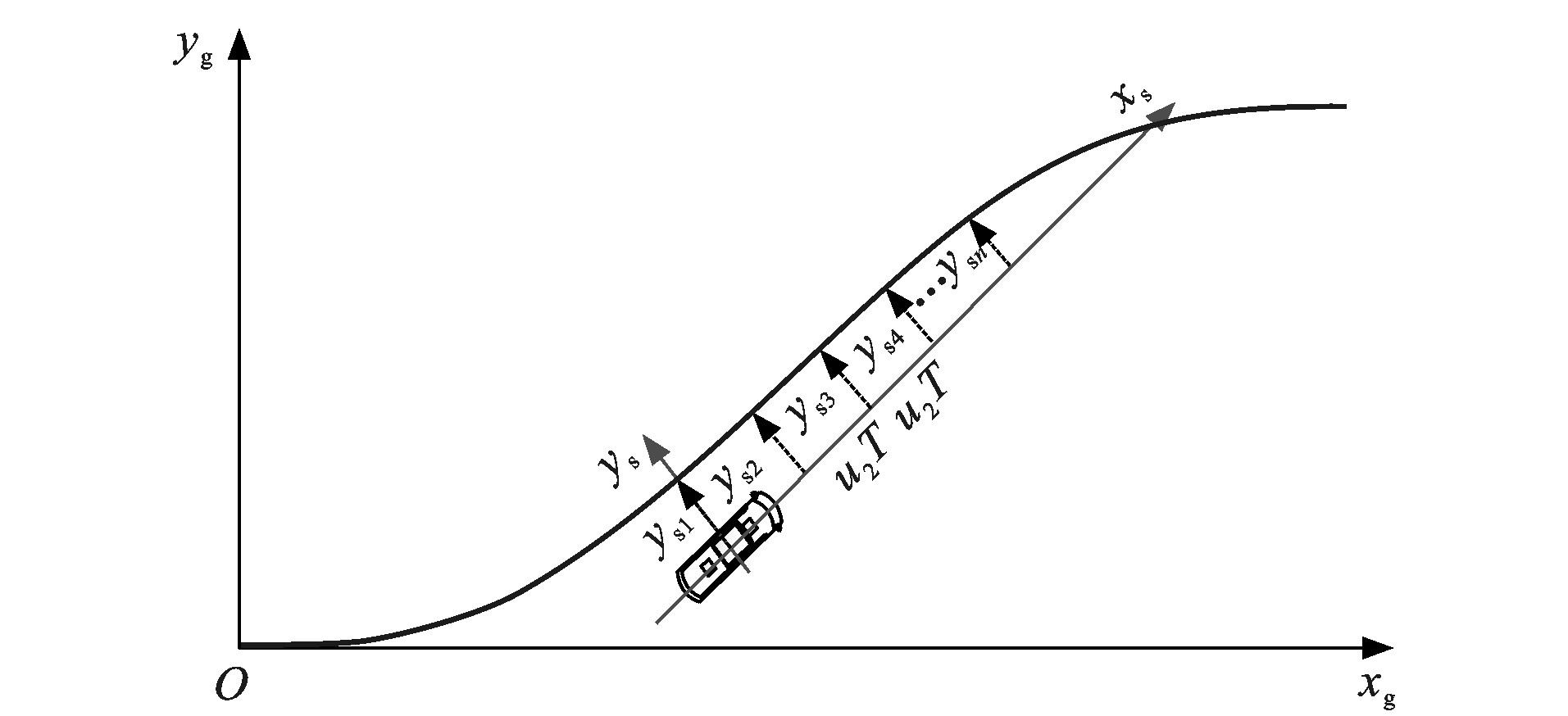
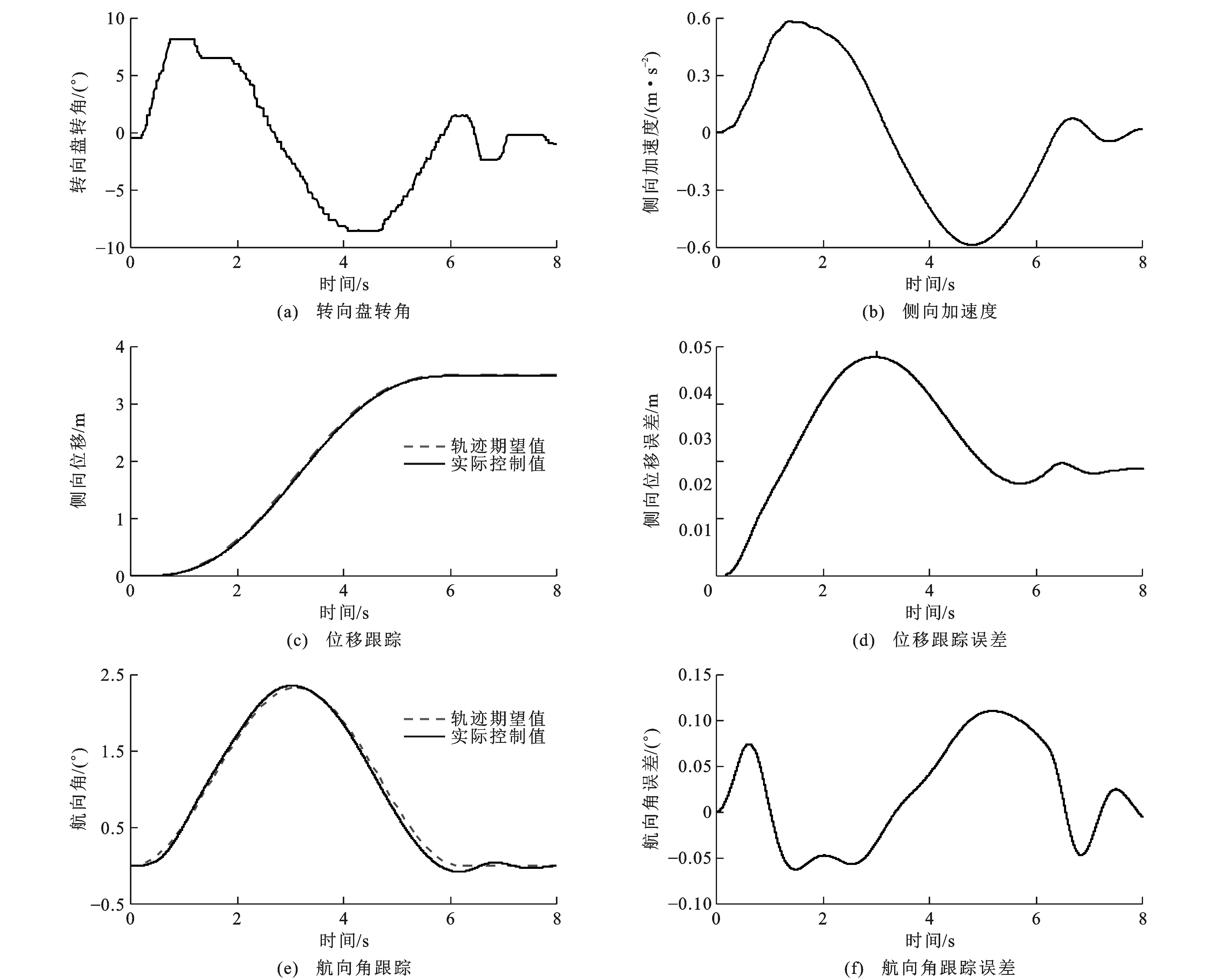
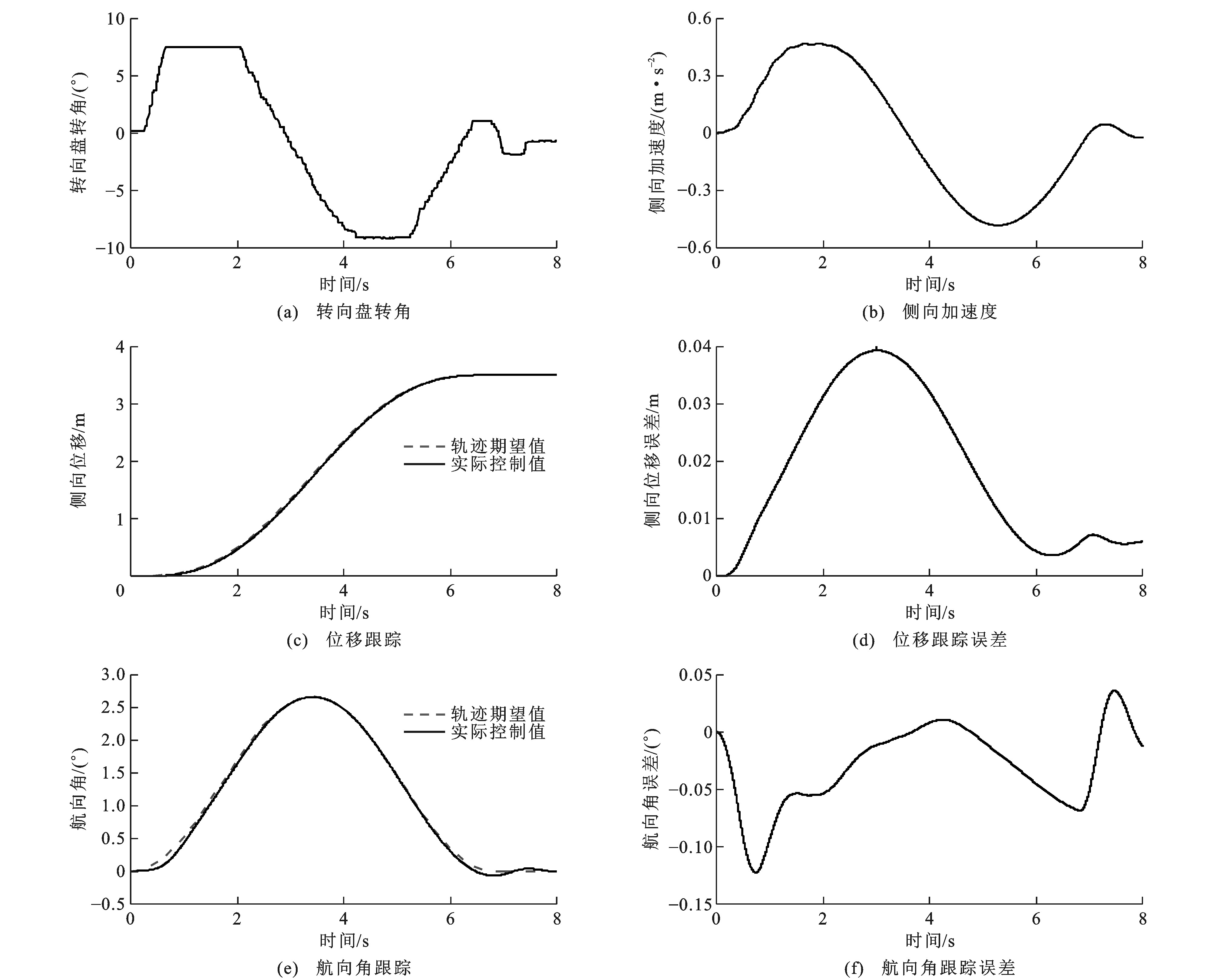
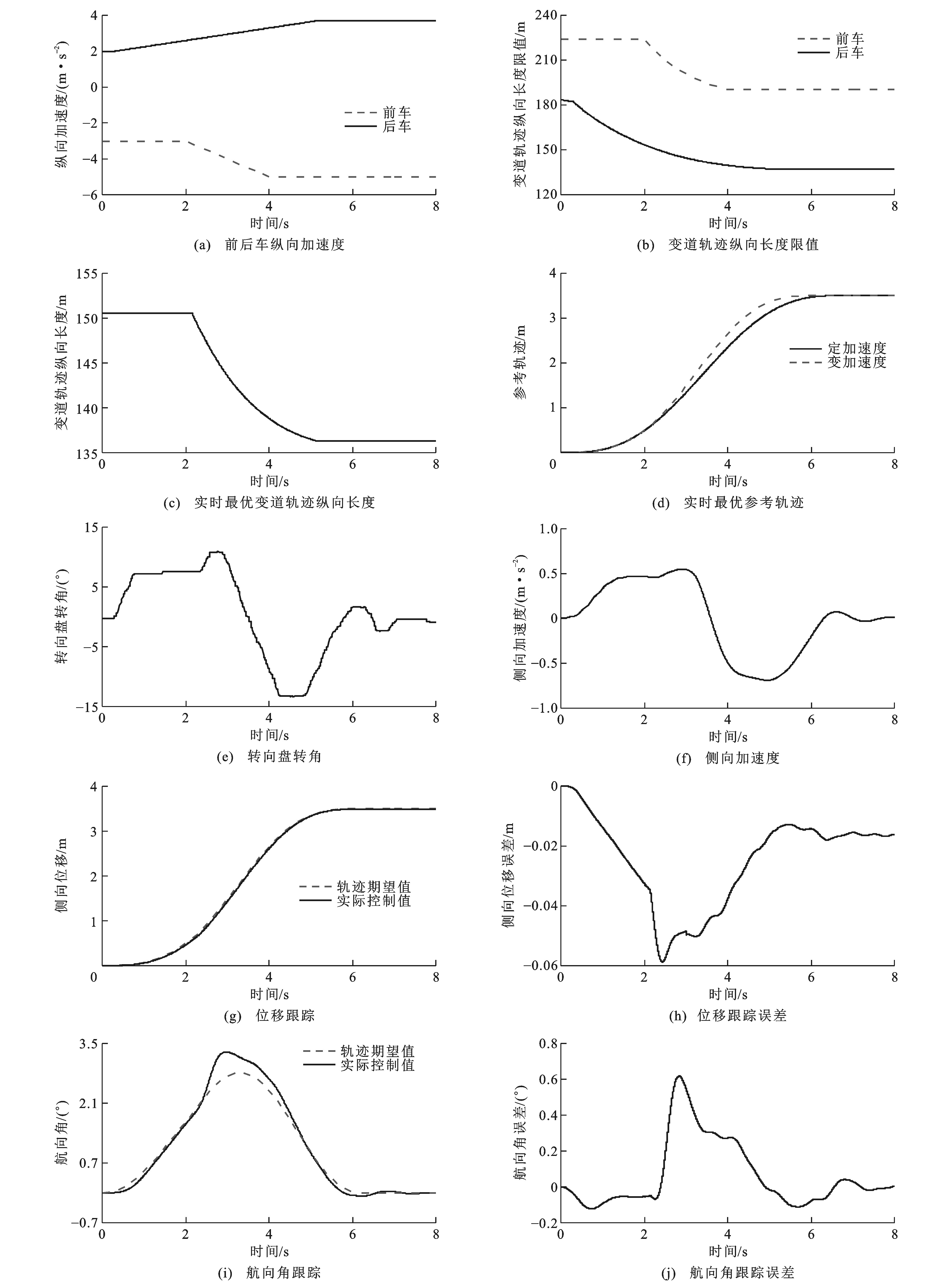
摘要: 为实现实际动态交通环境下智能汽车的变道控制, 提出了基于轨迹预瞄的智能汽车变道动态轨迹规划与跟踪控制策略; 针对实际交通环境下目标车道车速和加速度的动态变化, 提出了智能汽车变道动态轨迹规划算法, 获得了能够避免智能汽车发生碰撞的变道轨迹的动态最大纵向长度; 设计了兼顾变道效率和乘员舒适性的优化目标函数, 优化获得了在变道轨迹最大纵向长度范围内的实时动态最优变道轨迹; 利用轨迹预瞄前馈和状态反馈相结合的类人转向控制方式, 实现了智能汽车变道动态轨迹跟踪和乘员舒适性的最优控制, 并利用硬件在环试验台验证了所提控制策略的正确性。研究结果表明: 定速工况下实际与参考轨迹的侧向位移误差、航向角误差和最大侧向加速度分别为1.4%、4.8%和0.59 m·s-2; 定加速度工况下实际与参考轨迹的侧向位移误差、航向角误差和最大侧向加速度分别为1.1%、4.6%和0.48 m·s-2; 变加速度激烈工况下实际与参考轨迹的侧向位移误差和最大侧向加速度分别为1.7%和0.80 m·s-2, 航向角超调后能迅速重新跟踪动态轨迹航向角; 所提控制策略可以很好地跟踪控制实际交通环境下目标车道汽车在定车速、定加速度和变加速度工况下的智能汽车动态变道轨迹, 从而能实现智能汽车最优变道, 可确保变道过程中不与目标车道汽车发生碰撞, 并兼顾变道效率和乘员舒适性。Abstract: To obtain the control for lane change of intelligent vehicle in the actual dynamic traffic environment, the dynamic trajectory planning and tracking control strategy for the lane change of intelligent vehicle based on the trajectory preview was proposed. Aiming at the speed and acceleration changes of vehicles in the target lane in the actual traffic environment, a dynamic planning algorithm for the lane change trajectory of intelligent vehicle was proposed. The maximum longitudinal length of lane change trajectory of intelligent vehicle was obtained to avoid the collision. The optimization objective function considering both the lane change efficiency and the passenger comfort was designed to obtain the real-time dynamic optimal lane change trajectory within the maximum longitudinal length of lane change trajectory. The humanoid steering control method combining the trajectory preview feedforward with the state feedback was used to achieve the optimal controls of dynamic trajectory tracking and passenger comfort for the lane change of intelligent vehicle, and the proposed control strategy was verified on the hardware-in-loop test bench. Research result shows that under the constant speed condition, the lateral displacement and heading angle deviations between the actual and reference trajectories and the maximum lateral acceleration are 1.4%, 4.8% and 0.59 m·s-2, respectively. Under the constant acceleration condition, the lateral displacement and heading angle deviations between the actual and reference trajectories and the maximum lateral acceleration are 1.1%, 4.6% and 0.48 m·s-2, respectively. Under the intense condition of variable acceleration, the lateral displacement deviation between the actual and reference trajectories and the maximum lateral acceleration are 1.7% and 0.80 m·s-2, respectively, and the heading angle can quickly re-track the dynamic trajectory heading angle after the overshooting. Therefore, in the actual traffic environment, the proposed control strategy can well track and control the dynamic lane change trajectory of intelligent vehicle under the conditions that the vehicles in the target lane are in the constant speed, constant acceleration, and variable acceleration. Thus, it can realize the optimal lane change of intelligent vehicle, avoid collisions with vehicles in the target lane during the lane change process, and take into account both the lane change efficiency and the passenger comfort.
-

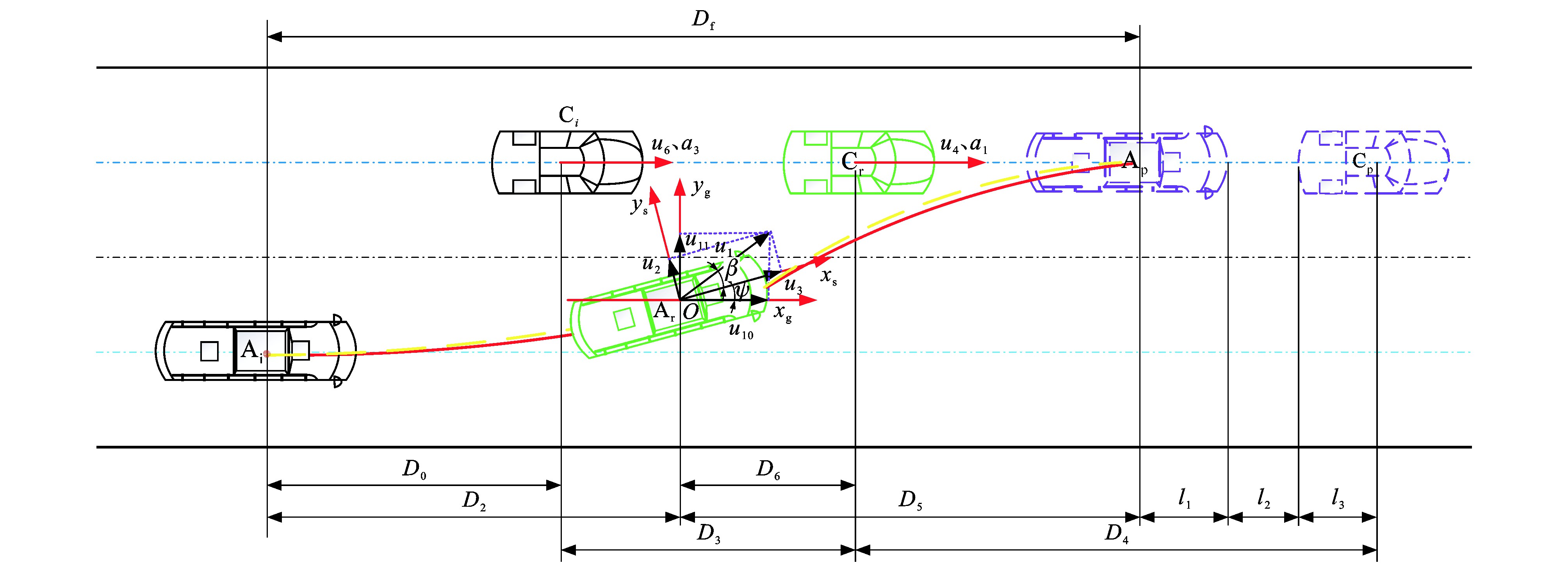
图 5 目标车道前车决定的变道轨迹曲线最大纵向长度
Figure 5. Maximum longitudinal length of lane change trajectory curve determined by front vehicle of target lane

图 9 车速为100 km·h-1时定速度动态变道试验结果
Figure 9. Experimental results of dynamic lane change with constant vehicle speed of 100 km·h-1

图 10 车速为80 km·h-1时定加速度动态变道试验结果
Figure 10. Experimental results of dynamic lane change with constant acceleration when vehicle speed is 80 km·h-1

图 11 车速为80 km·h-1时变加速度动态变道试验结果
Figure 11. Experimental results of dynamic lane change with variable acceleration when vehicle speed is 80 km·h-1
表 1 汽车模型参数
Table 1. Parameters of vehicle model
参数 值 参数 值 m1/kg 7 388 m2/kg 6 360 I1/(kg·m2) 38 170 h/m 1.105 p/m 2.995 b/m 1.495 k1/(N·rad-1) -200 100 k2/(N·rad-1) -489 600  下载: 导出CSV
下载: 导出CSV
-
[1] CAO Hao-tian, SONG Xiao-lin, ZHAO Song, et al. An optimal model-based trajectory following architecture synthesising the lateral adaptive preview strategy and longitudinal velocity planning for highly automated vehicle[J]. Vehicle System Dynamics, 2017, 55(8): 1143-1188. doi: 10.1080/00423114.2017.1305114 [2] HE Xiang-kun, LIU Yu-long, LYU Chen, et al. Emergency steering control of autonomous vehicle for collision avoidance and stabilization[J]. Vehicle System Dynamics, 2019, 57(8): 1163-1187. doi: 10.1080/00423114.2018.1537494 [3] NARANJOJ E, GONZALEZ C, GARCIA R, et al. Lane-change fuzzy control in autonomous vehicles for the overtaking maneuver[J]. IEEE Transactions on Intelligent Transportation Systems, 2008, 9(3): 438-450. doi: 10.1109/TITS.2008.922880 [4] NILSSON J, BRÄNNSTRÖM M, COELINGH E, et al. Lane change maneuvers for automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(5): 1087-1096. doi: 10.1109/TITS.2016.2597966 [5] ZHOU Jian, ZHENG Hong-yu, WANG Jun-min, et al. Multiobjective optimization of lane-changing strategy for intelligent vehicles in complex driving environments[J]. IEEE Transactions on Vehicular Technology, 2020, 69(2): 1291-1308. doi: 10.1109/TVT.2019.2956504 [6] CHU K, LEE M, SUNWOO M. Local path planning for off-road autonomous driving with avoidance of static obstacles[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(4): 1599-1616. doi: 10.1109/TITS.2012.2198214 [7] GONZÁLEZ D, PÉREZ J, MILANÉS V, et al. A review of motion planning techniques for automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 17(4): 1135-1145. [8] BEVLY D, CAO Xiao-long, GORDON M, et al. Lane change and merge maneuvers for connected and automated vehicles: a survey[J]. IEEE Transactions on Intelligent Vehicles, 2016, 1(1): 105-120. doi: 10.1109/TIV.2015.2503342 [9] ZHANG Su-min, DENG Wei-wen, ZHAO Qing-rong, et al. Dynamic trajectory planning for vehicle autonomous driving[C]//IEEE. IEEE International Conference on Systems, Man, and Cybernetics. New York: IEEE, 2013: 4161-4166. [10] LUO Yu-gong, XIANG Yong, CAO Kun, et al. A dynamic automated lane change maneuver based on vehicle-to-vehicle communication[J]. Transportation Research Part C: Emerging Technologies, 2016, 62: 87-102. doi: 10.1016/j.trc.2015.11.011 [11] YANG Da, ZHENG Shi-yu, WEN Cheng, et al. A dynamic lane-changing trajectory planning model for automated vehicles[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 228-247. doi: 10.1016/j.trc.2018.06.007 [12] NILSSON J, SILVLIN J, BRANNSTROM M, et al. If, when, and how to perform lane change maneuvers on highways[J]. IEEE Intelligent Transportation Systems Magazine, 2016, 8(4): 68-78. doi: 10.1109/MITS.2016.2565718 [13] GLASER S, VANHOLME B, MAMMAR S, et al. Maneuver-based trajectory planning for highly autonomous vehicles on real road with traffic and driver interaction[J]. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(3): 589-606. doi: 10.1109/TITS.2010.2046037 [14] SHIM T, ADIREDDY G, YUAN Hong-liang. Autonomous vehicle collision avoidance system using path planning and model-predictive-control-based active front steering and wheel torque control[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2012, 226(6): 767-778. doi: 10.1177/0954407011430275 [15] KANARIS A, KOSMATOPOULOS E B, LOANNOU P A. Strategies and spacing requirements for lane changing and merging in automated highway systems[J]. IEEE Transactions on Vehicular Technology, 2001, 50(6): 1568-1581. doi: 10.1109/25.966586 [16] JI Jie, KHAJEPOUR A, MELEK W W, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multi-constraints[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2): 952-964. doi: 10.1109/TVT.2016.2555853 [17] JO K, LEE M, KIM J, et al. Tracking and behavior reasoning of moving vehicles based on roadway geometry constraints[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(2): 460-476. doi: 10.1109/TITS.2016.2605163 [18] YU Zhuo-ping, ZHANG Ren-xie, XIONG Lu, et al. Robust hierarchical controller with conditional integrator based on small gain theorem for reference trajectory tracking of autonomous vehicles[J]. Vehicle System Dynamics, 2019, 57(8): 1143-1162. doi: 10.1080/00423114.2018.1555333 [19] HWANG C L, YANGCC, HUNGJ Y. Pathr-tracking of anautonomous vehicle via model predictive control and nonlincarfiltering[J]. IEEETransactions on Fuzzy Systems. 2017: 10.1109/TFUZZ. 2017.2698370. [20] GUO Jing-hua, LUO Yu-gong, LI Ke-qiang. Robust gain-scheduling automatic steering control of unmanned ground vehicles under velocity-varying motion[J]. Vehicle System Dynamics, 2019, 57(4): 595-616. doi: 10.1080/00423114.2018.1475677 [21] 张荣辉, 游峰, 初鑫男, 等. 车-车协同下无人驾驶汽车的换道汇入控制方法[J]. 中国公路学报, 2018, 31(4): 180-191. doi: 10.3969/j.issn.1001-7372.2018.04.022ZHANG Rong-hui, YOU Feng, CHU Xin-nan, et al. Lane change merging control method for unmanned vehicle under V2V cooperative environment[J]. China Journal of Highway and Transport, 2018, 31(4): 180-191. (in Chinese). doi: 10.3969/j.issn.1001-7372.2018.04.022 [22] 章仁燮, 熊璐, 余卓平, 等. 基于条件积分算法的无人驾驶汽车轨迹跟踪鲁棒控制方法[J]. 机械工程学报, 2018, 54(18): 129-139. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201818017.htmZHANG Ren-xie, XIONG Lu, YU Zhuo-ping, et al. Robust trajectory tracking control of autonomous vehicles based on conditional integration method[J]. Journal of Mechanical Engineering, 2018, 54(18): 129-139. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201818017.htm [23] 聂枝根, 王万琼, 王超, 等. 中高速重型半挂车适时模式切换的集成控制策略[J]. 交通运输工程学报, 2017, 17(6): 135-149. doi: 10.3969/j.issn.1671-1637.2017.06.015NIE Zhi-gen, WANG Wan-qiong, WANG Chao, et al. Integrated control strategy of articulated heavy vehicle based on timely mode switching under medium/high speed conditions[J]. Journal of Traffic and Transportation Engineering, 2017, 17(6): 135-149. (in Chinese). doi: 10.3969/j.issn.1671-1637.2017.06.015 [24] THOMMYPPILLAI M, EVANGELOU S, SHARP R S. Car driving at the limit by adaptive linear optimal preview control[J]. Vehicle System Dynamics, 2009, 47(12): 1535-1550. doi: 10.1080/00423110802673109 [25] TAMADDONI S H, TAHERI S, AHMADIAN M. Optimal preview game theory approach to vehicle stability controller design[J]. Vehicle system dynamics, 2011, 49(12): 1967-1979. doi: 10.1080/00423114.2011.565778 [26] 聂枝根, 王万琼, 宗长富, 等. 基于线性变参数实时简化模型的重型半挂车稳定性控制策略[J]. 中国公路学报, 2018, 31(1): 128-136. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201801016.htmNIE Zhi-gen, WANG Wan-qiong, ZONG Chang-fu, et al. Stability control strategy for articulated heavy vehicles based on linear simplified model with real-time parameters[J]. China Journal of Highway and Transport, 2018, 31(1): 128-136. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201801016.htm [27] JULA H, KOSMATOPOULOS E B, IOANNOU P A. Collision avoidance analysis for lane changing and merging[J]. IEEE Transactions on Vehicular Technology, 2000, 49(6): 2295-2308. [28] LIAN Yu-feng, WANG Xiao-yu, TIAN Yan-tao, et al. Lateral collision avoidance robust control of electric vehicles combining a lane-changing model based on vehicle edge turning trajectory and a vehicle semi-uncertainty dynamic model[J]. International Journal of Automotive Technology, 2018, 19(2): 331-343. [29] SHARP R S, VALTETSIOTIS V. Optimal preview car steering control[J]. Vehicle System Dynamics, 2001, 35: 101-117. [30] CHENG C, CEBON D. Improving roll stability of articulated heavy vehicles using active semi-trailer steering[J]. Vehicle System Dynamics, 2008, 46(S1): 373-388. -



 点击查看大图
点击查看大图
计量
- 文章访问数: 1239
- HTML全文浏览量: 198
- PDF下载量: 503
- 被引次数: 0
