

Forward collision warning algorithm optimization and calibration based on objective risk perception characteristic
-
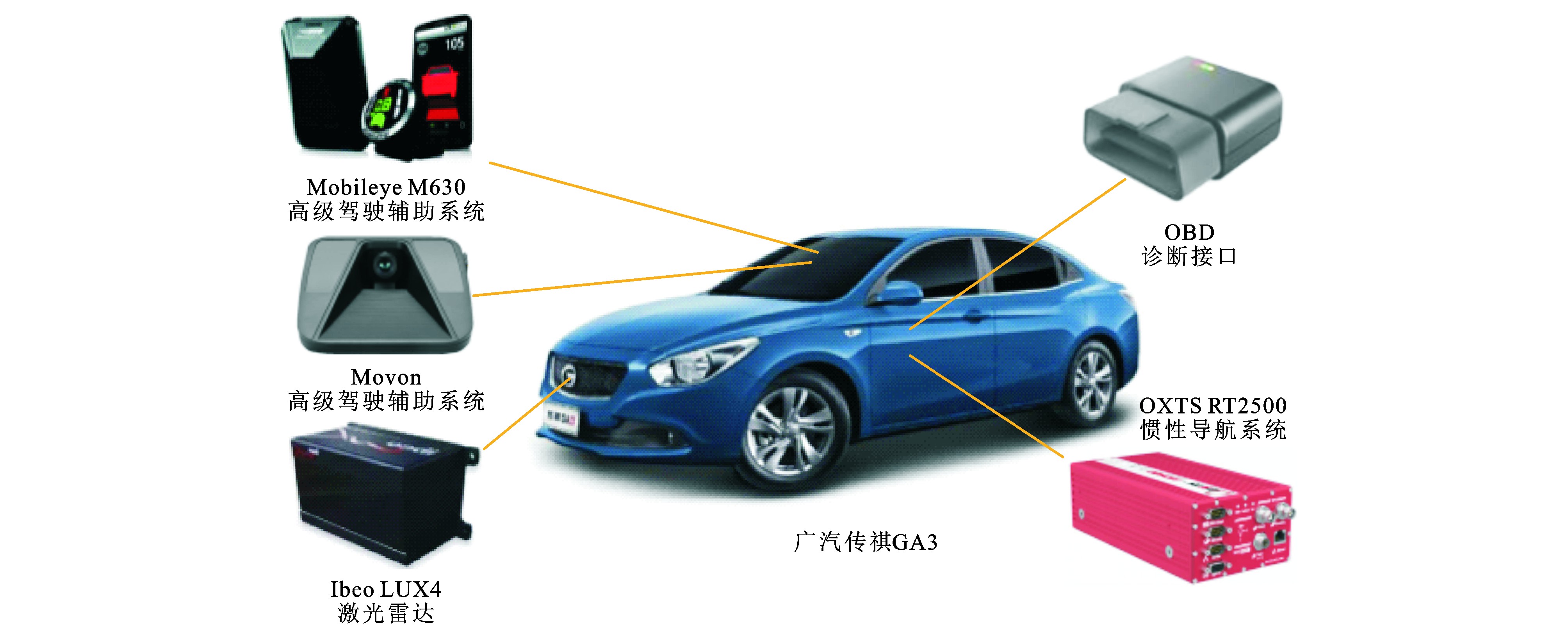
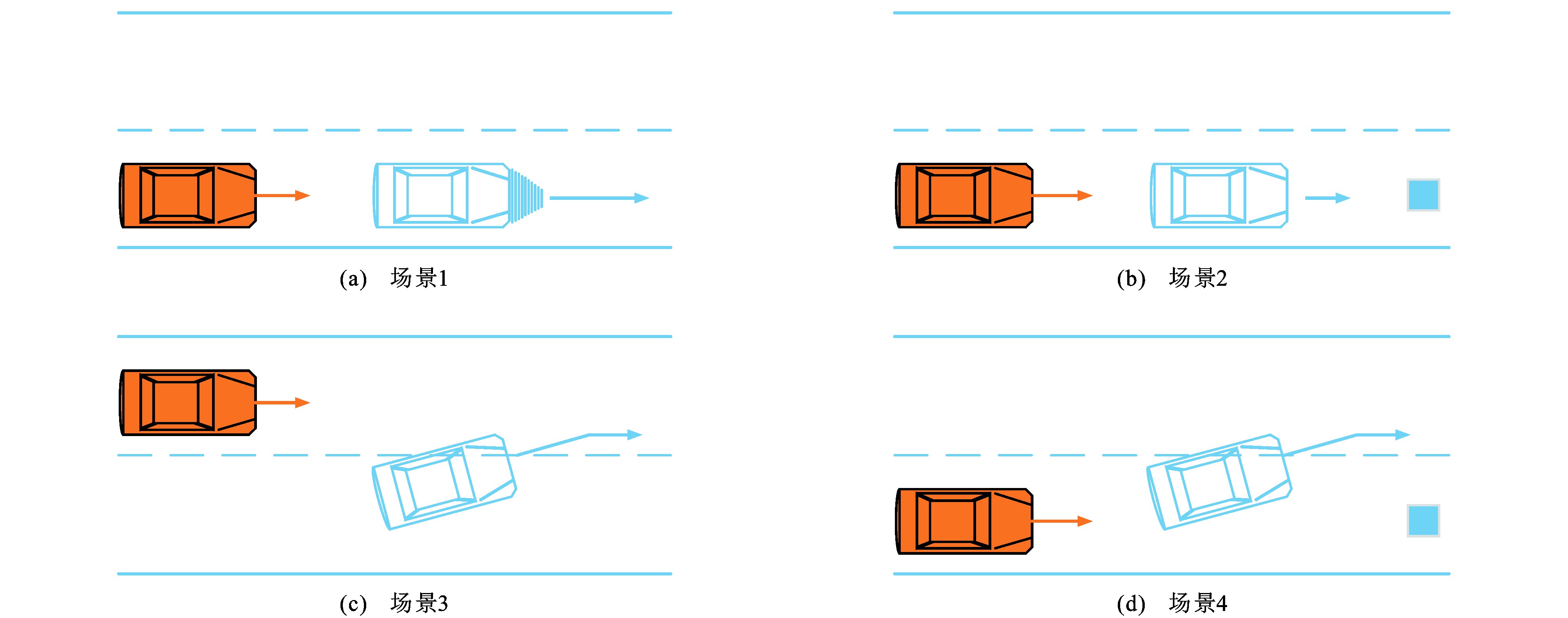
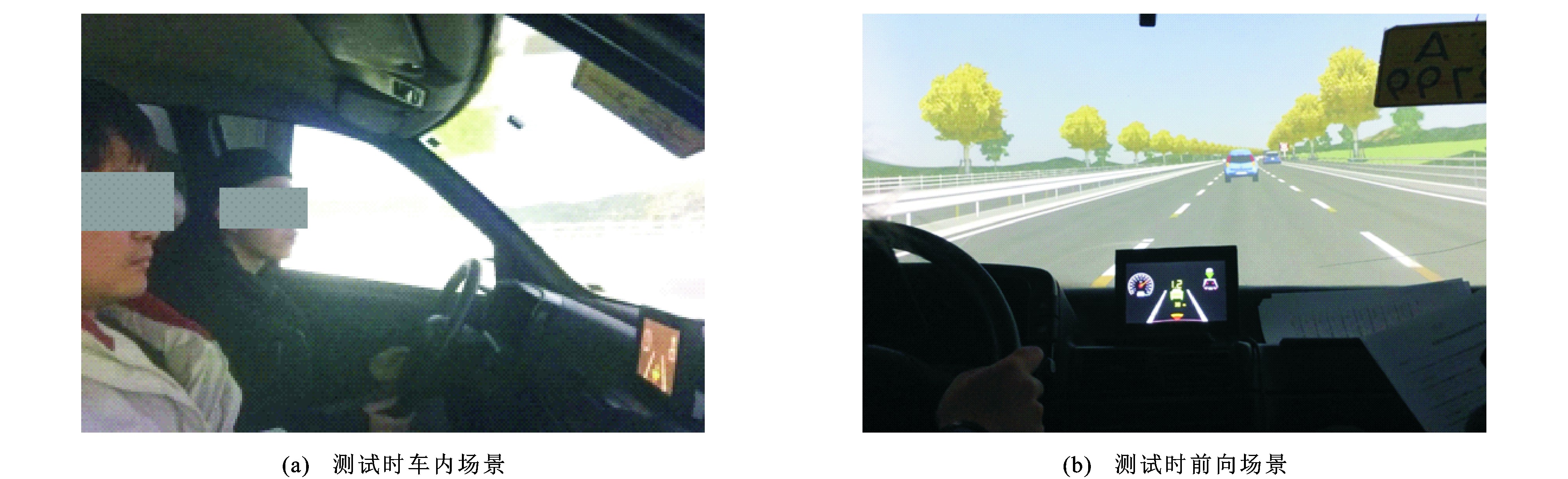
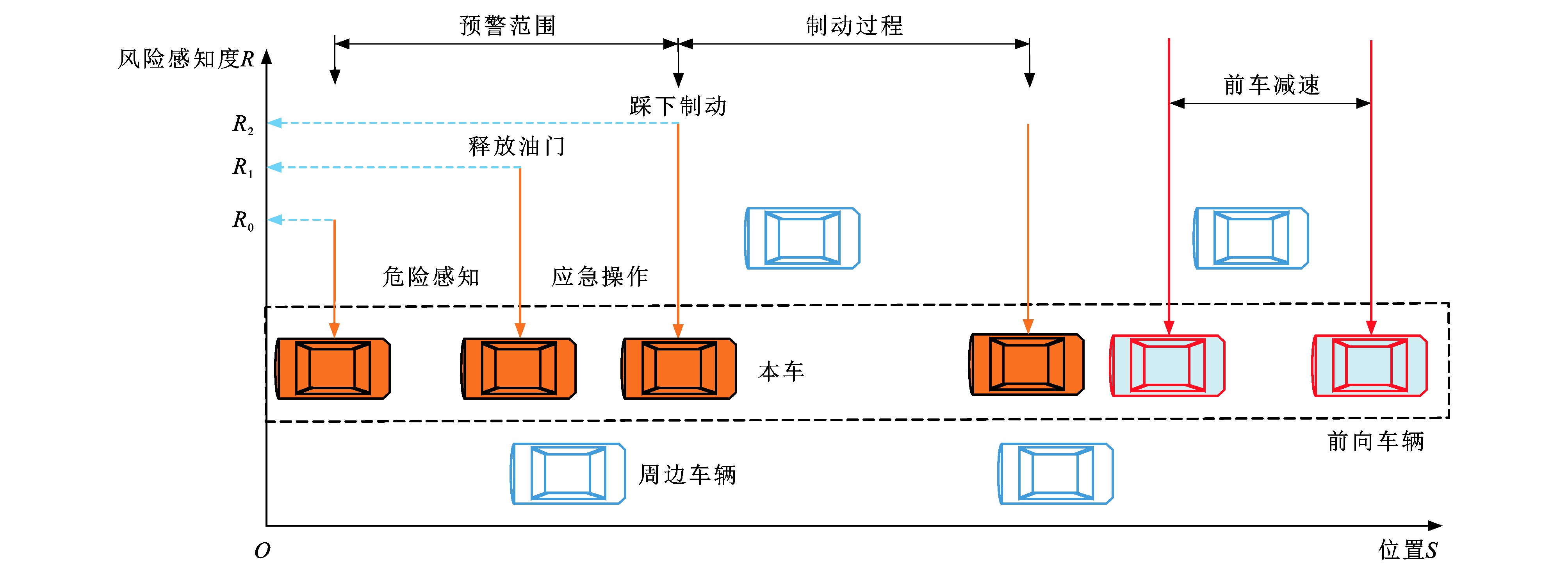
摘要: 为提升高级驾驶辅助系统(ADAS)预警算法在复杂行车环境下的适应性, 提出了一种基于车辆运动学和风险感知特性的综合预警算法——客观风险感知(ORP)算法; 通过典型工况下的分析与推导, 表明其预警算法为THW、TTC和SM预警算法的综合形式; 为了标定预警算法的参数阈值, 开展了累计4 500 km自然驾驶试验, 最终筛选出409例有效临近碰撞事件, 提取了释放油门、踩下制动时刻的客观风险感知参数分布特征; 根据自然驾驶数据中提取的临近碰撞事件及其参数特征, 对风险预警算法参数进行标定; 在模拟驾驶环境下开发了前向碰撞预警算法, 通过4种风险场景开展了算法验证试验。研究结果表明: 基于自然驾驶数据的参数标定, 客观风险感知预警算法的两级预警参数阈值分别为1.4、0.8 s; 基于典型风险工况下的微观驾驶行为特性对比, 预警有效性方面ORP预警算法稍高于RP预警算法, 二者预警有效性显著高于TTC预警算法; 在预警算法下所有驾驶片段的最小碰撞时间均值方面, ORP预警算法为2.02 s, RP预警算法为1.90 s, TTC预警算法为1.65 s, 表明ORP预警算法能适应复杂风险环境下的风险辨识。基于大量实车试验参数标定与效果验证后, 所提出预警算法可用于高级驾驶辅助系统风险辨识。Abstract: In order to improve the adaptability of advanced driver assistance system(ADAS) warning algorithm in complex driving environments, a comprehensive warning algorithm named the objective risk perception(ORP) algorithm based on the vehicle kinematics and risk perception characteristic was proposed. The analysis and derivation under typical risk conditions show that the proposed warning algorithm is a comprehensive mode of time headway(THW), time-to-collision(TTC) and safety margine(SM) based warning algorithms. In order to calibrate the parameter thresholds of the proposed warning algorithm, a total of 4 500 km natural driving experiments were carried out, and finally 409 valid near-crash events were extracted. The distribution characteristics of objective risk perception parameters when release accelerator and press brake were obtained. The risk warning algorithm parameters were calibrated based on the near-crash events and their parameter characteristics extracted from the natural driving data. The forward collision warning algorithm was developed under a simulated driving environment, and the verification experiments of the algorithm were carried out based on four risk scenarios. Research result shows that based on the parameter calibration of natural driving data, the two-level warning parameter thresholds of the ORP warning algorithm are 1.4 and 0.8 s, respectively. Based on the comparison of driving behavior under typical risk conditions, in terms of warning effectiveness, the ORP warning algorithm is slightly higher than the RP warning algorithm, and the effectiveness of secondary early warnings is significantly higher than that of the TTC warning algorithm. In terms of the average minimum time-to-collision of all driving segments under the warning algorithm, the ORP warning algorithm is 2.02 s, the RP warning algorithm is 1.90 s, and the TTC warning algorithm is 1.65 s, which shows that the ORP warning algorithm can adapt to the risk identification in complex risk environment. Based on a large number of natural driving test based parameter calibration and effect verification, the proposed warning algorithm can be used for the risk identification of advanced driver assistance systems.
-

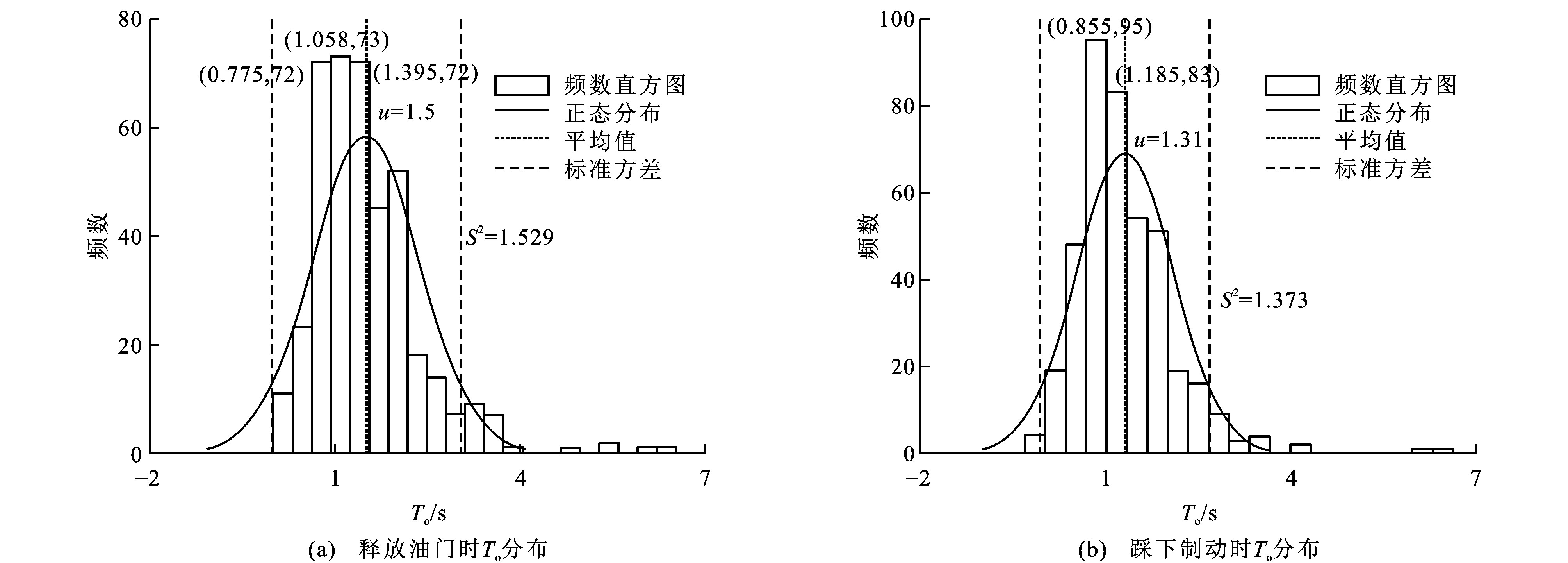
图 4 典型时刻To频数直方图和正态分布拟合曲线
Figure 4. To frequency histograms and normal distribution fitting curves at typical times

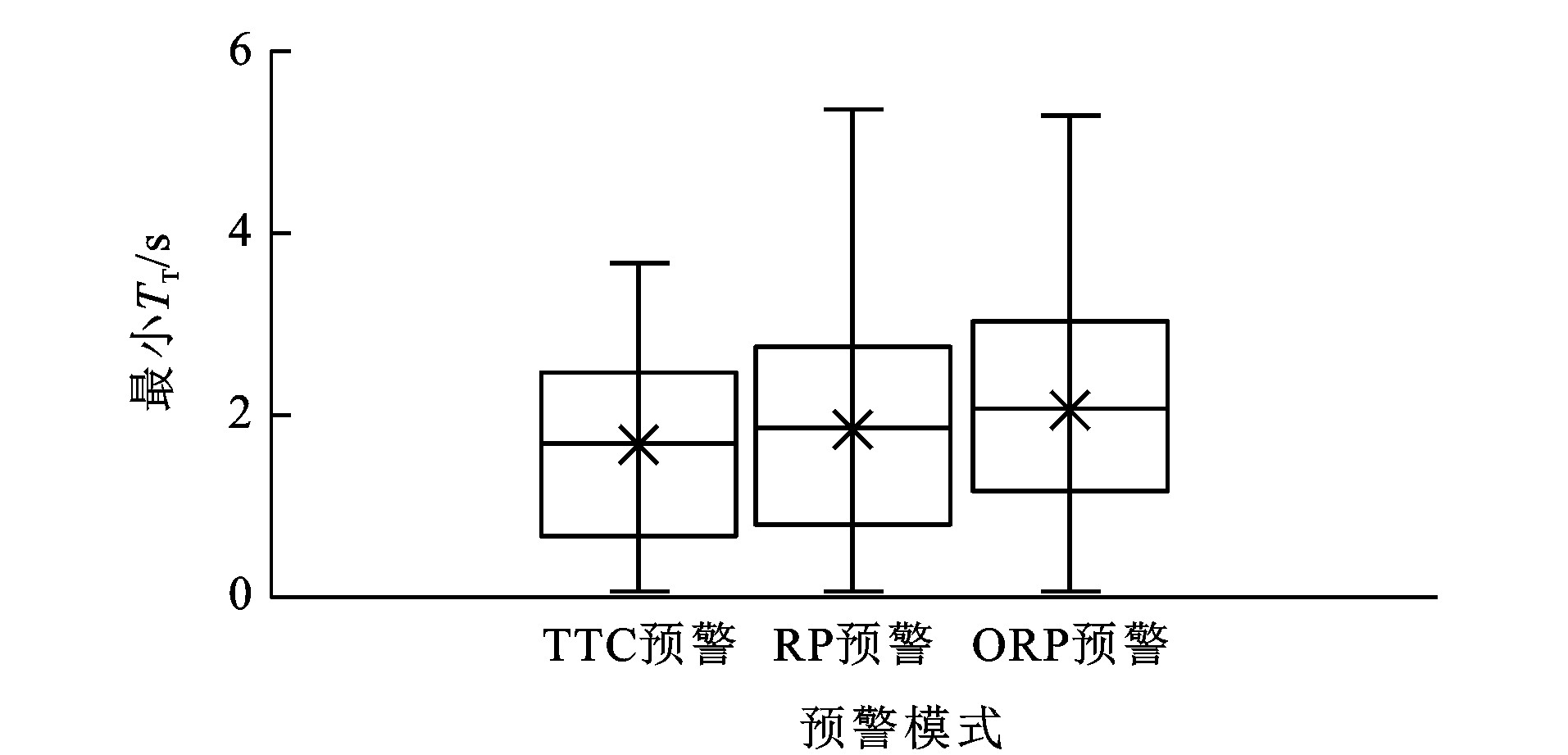
图 8 三种预警模式下风险场景最小TT箱型图
Figure 8. Minimal TT box diagrams in risk scenarios of three warning algorithms
表 1 试验者基本信息
Table 1. Basic information of participants
基本信息 被试数量 年龄 驾龄 驾驶里程/km 均值 标准差 均值 标准差 均值 标准差 总体 44 30.2 6.2 7.6 5.6 106 000 13.4 男性 32 33.5 7.2 8.4 4.4 95 600 11.8 女性 12 32.0 7.8 8.2 5.1 162 000 17.1  下载: 导出CSV
下载: 导出CSV
表 2 风险感知过程关键时刻参数值
Table 2. Parameter values at critical moments in risk perception process
参数 最大值 最小值 平均值 标准差 95分位值 速度/(km·h-1) 92.90 20.10 42.10 16.50 73.00 最大减速度/(m·s-2) 2.00 4.91 2.70 2.00 2.00 反应时间/s 2.50 0.30 1.10 0.56 2.20 释放油门时的Th/s 6.50 0.17 1.60 0.87 3.35 释放油门时的TT/s 1 137.80 -927.10 12.51 22.95 3.65 踩下制动时的Th/s 6.70 0.14 1.43 0.77 2.78 踩下制动时的TT/s 991.51 -887.77 8.33 15.73 2.18
下载: 导出CSV
表 3 释放油门和踩下制动时的To统计结果
Table 3. Tostatistic results when release accelerator and press brake
参数 均值 标准差 中位值 25分位值 75分位值 释放油门 1.50 1.53 1.35 0.90 1.92 踩下制动 1.31 1.37 1.15 0.78 1.70
下载: 导出CSV
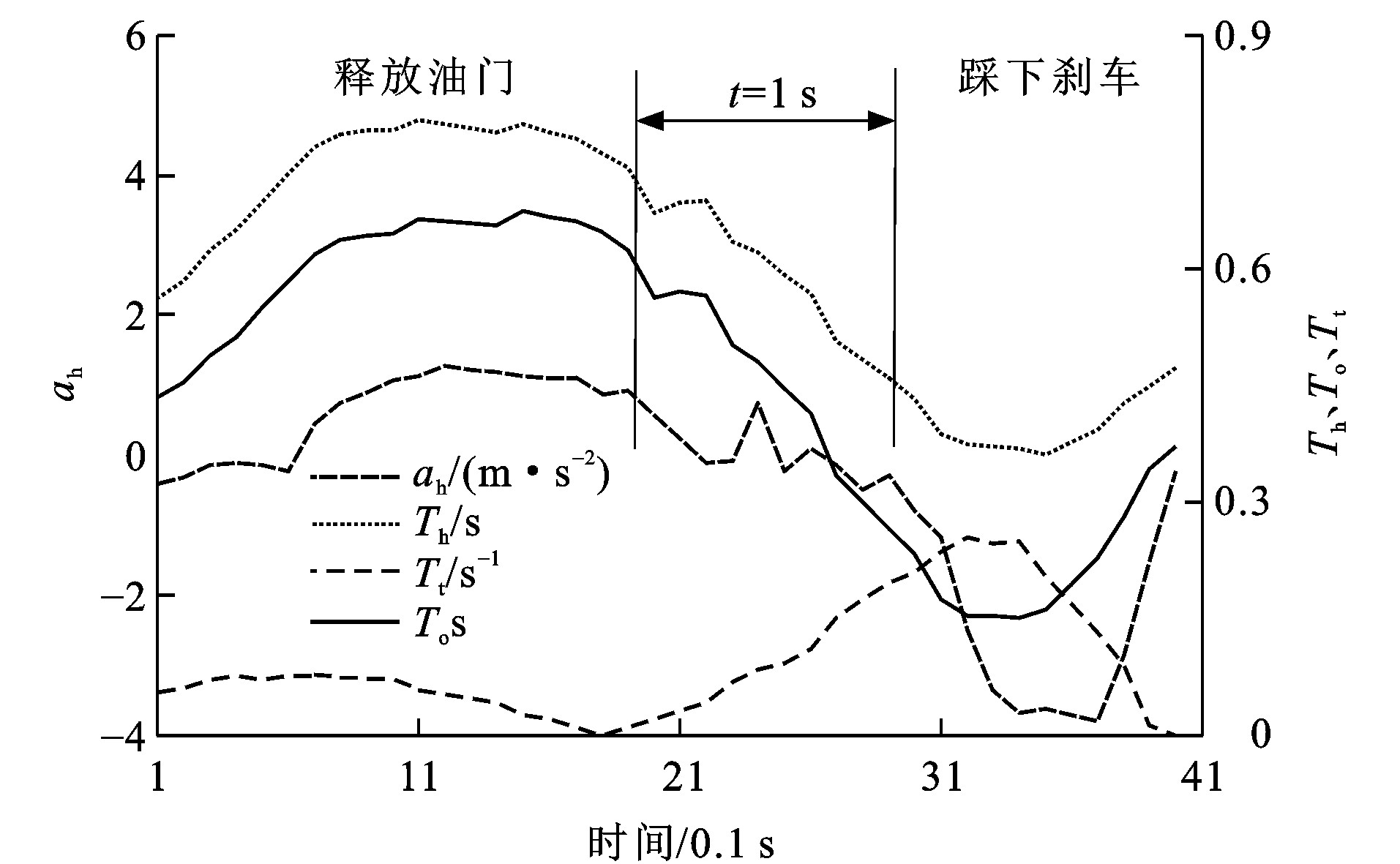
表 4 释放油门和踩下制动时的各参数
Table 4. Parameters when release accelerator and press brake
参数 ah/(m·s-2) Th/s Tt/s-1 To/s D/m 释放油门 0.92 0.73 0.01 0.62 5.50 踩下制动 -0.29 0.46 0.19 0.26 3.45
下载: 导出CSV
表 5 不同预警算法的预警效果统计
Table 5. Warning effect statistics of different warning algorithms
预警模式 TTC预警 RP预警 ORP预警 试验次数 64 64 64 有效预警次数 50 56 55 失败预警次数 9 4 4 漏报次数 5 3 0 主动解除次数 5 4 5 碰撞次数 2 2 2
下载: 导出CSV
表 6 三种预警模式下风险场景最小TT参数统计
Table 6. Statistics of minimum TTparameters in risk scenarios of three warning algorithms
预警模式 均值/s 标准差/s 中位值/s 75分位值/s 90分位值/s TTC预警 1.65 1.08 1.70 2.45 3.16 RP预警 1.90 1.31 1.90 2.80 3.60 ORP预警 2.02 1.25 2.10 2.95 3.50
下载: 导出CSV
-
[1] WANG Jian-qiang, ZHENG Yang, LI Xiao-fei, et al. Driving risk assessment using near-crash database through data mining of tree-based model[J]. Accident Analysis and Prevention, 2015, 84: 54-64. doi: 10.1016/j.aap.2015.07.007 [2] 刘永涛, 华珺, 赵俊玮, 等. 场景风险引导下驾驶人应激反应能力研究[J]. 交通信息与安全, 2019, 37(3): 35-41, 50. doi: 10.3963/j.issn.1674-4861.2019.03.005LIU Yong-tao, HUA Jun, ZHAO Jun-wei, et al. Emergency response ability of drivers under risk guidance situations[J]. Journal of Transport Information and Safety, 2019, 37(3): 35-41, 50. (in Chinese). doi: 10.3963/j.issn.1674-4861.2019.03.005 [3] 徐美华, 张凯欣, 蒋周龙. 一种实时车道线偏离预警系统算法设计和实现[J]. 交通运输工程学报, 2016, 16(3): 149-158. doi: 10.3969/j.issn.1671-1637.2016.03.018XU Mei-hua, ZHANG Kai-xin, JIANG Zhou-long. Algorithm design implementation for a real-time lane departure pre-warning system[J]. Journal of Traffic and Transportation Engineering, 2016, 16(3): 149-158. (in Chinese). doi: 10.3969/j.issn.1671-1637.2016.03.018 [4] GIETELINK O, PLOEG J, DE SCHUTTER B, et al. Development of advanced driver assistance systems with vehicle hardware-in-the-loop simulations[J]. Vehicle System Dynamics, 2006, 44(7): 569-590. doi: 10.1080/00423110600563338 [5] 吕能超, 秦羚, 罗毅. 先进驾驶辅助系统的接受程度及其影响因素分析[J]. 交通信息与安全, 2017, 35(6): 54-59. doi: 10.3963/j.issn.1674-4861.2017.06.008LYU Neng-chao, QIN Ling, LUO Yi. An analysis of the acceptance of advanced driver assistance systems and influencing factors[J]. Journal of Transport Information and Safety, 2017, 35(6): 54-59. (in Chinese). doi: 10.3963/j.issn.1674-4861.2017.06.008 [6] 吕能超, 段至诚, 吴超仲. 驾驶经验对先进驾驶辅助系统的作用研究[J]. 交通运输系统工程与信息, 2017, 17(6): 48-55. https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201706008.htmLYU Neng-chao, DUAN Zhi-cheng, WU Chao-zhong. The impact of driving experience on advanced driving assistant systems[J]. Journal of Transportation Systems Engineering and Information Technology, 2017, 17(6): 48-55. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201706008.htm [7] SEILER P, SONG B, HEDRICK J K. Development of a collision avoidance system[J]. Automotive Engineering, 1998, 106(9): 24-28. [8] YANG H H, PENG H. Development and evaluation of collision warning/collision avoidance algorithms using an errable driver model[J]. Vehicle System Dynamics, 2010, 48(10): 525-535. [9] CHEN Y L, SHEN K Y, WANG S C. Forward collision warning system considering both time-to-collision and safety braking distance[J]. International Journal of Vehicle Safety, 2013, 6(4): 347-360. doi: 10.1504/IJVS.2013.056968 [10] TAWFEEK M H, EL-BASYOUNY K. A perceptual forward collision warning model using naturalistic driving data[J]. Canadian Journal of Civil Engineering, 2016, 45(10): 899-907. [11] DANG R, ZHANG F, TAKAE Y, et al. Braking characteristics of Chinese driver in highway and urban road[J]. IFAC Proceedings Volumes, 2013, 46(21): 322-327. doi: 10.3182/20130904-4-JP-2042.00016 [12] CHEN Rong, SHERONY R, GABLER H C. Comparison of time to collision and enhanced time to collision at brake application during normal driving[R]. New York: SAE International, 2016. [13] KONDOH T, YAMAMURA T, KITAZAKI S, et al. Identification of visual cues and quantification of drivers' perception of proximity risk to the lead vehicle in car-following situations[J]. Journal of Mechanical Systems for Transportation and Logistics, 2008, 1(2): 170-180. doi: 10.1299/jmtl.1.170 [14] LU Guang-quan, CHENG Bo, LIN Qing-feng, et al. Quantitative indicator of homeostatic risk perception in car following[J]. Safety Science, 2012, 50(9): 1898-1905. doi: 10.1016/j.ssci.2012.05.007 [15] AOKI H, HUNG N V Q, YASUDA H. Perceptual risk estimate (PRE): an index of the longitudinal risk estimate[C]//NHTSA. Proceedings of the 22nd International Technical Conference on the Enhanced Safety of Vehicles (ESV). Washington DC: NHTSA, 2011: 1-6. [16] 迟瑞娟, 肖庆, 丁洁云. 基于风险状态预估的弯道车辆前撞报警算法[J]. 中国公路学报, 2013, 26(4): 146-153, 168. doi: 10.3969/j.issn.1001-7372.2013.04.020CHI Rui-juan, XIAO Qing, DING Jie-yun. Vehicle forward collision warning algorithm based on risk prediction on curved roads[J]. China Journal of Highway and Transport, 2013, 26(4): 146-153, 168. (in Chinese). doi: 10.3969/j.issn.1001-7372.2013.04.020 [17] 吴斌, 朱西产, 沈剑平, 等. 基于自然驾驶数据的危险评估算法研究[J]. 汽车工程, 2017, 39(8): 907-914. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201708009.htmWU Bin, ZHU Xi-chan, SHEN Jian-ping, et al. A study on risk assessment algorithm based on natural driving data[J]. Automotive Engineering, 2017, 39(8): 907-914. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201708009.htm [18] 李霖, 朱西产, 马志雄. 驾驶员在真实交通危险工况中的制动反应时间[J]. 汽车工程, 2014, 36(10): 1225-1229, 1253. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201410014.htmLI Lin, ZHU Xi-chan, MA Zhi-xiong. Driver brake reaction time under real traffic risk scenarios[J]. Automotive Engineering, 2014, 36(10): 1225-1229, 1253. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201410014.htm [19] 李霖, 朱西产, 陈海林. 驾驶员制动和转向避撞极限[J]. 同济大学学报(自然科学版), 2016, 44(11): 1743-1748. doi: 10.11908/j.issn.0253-374x.2016.11.015LI Lin, ZHU Xi-chan, CHEN Hai-lin. Drivers' collision avoidance limit by braking and steering[J]. Journal of Tongji University (Natural Science), 2016, 44(11): 1743-1748. (in Chinese). doi: 10.11908/j.issn.0253-374x.2016.11.015 [20] LYU Neng-chao, DENG Chao, XIE Lian, et al. A field operational test in China: exploring the effect of an advanced driver assistance system on driving performance and braking behavior[J]. Transportation Research Part F: Traffic Psychology and Behavior, 2019, 65, 730-747. doi: 10.1016/j.trf.2018.01.003 [21] 吴超仲, 吴浩然, 吕能超. 人机共驾智能汽车的控制权切换与安全性综述[J]. 交通运输工程学报, 2018, 18(6): 131-141. doi: 10.3969/j.issn.1671-1637.2018.06.014WU Chao-zhong, WU Hao-ran, LYU Neng-chao. Review of research on control switch safety of man-machine shared driving intelligent vehicles[J]. Journal of Traffic and Transportation Engineering, 2018, 18(6): 131-141. (in Chinese). doi: 10.3969/j.issn.1671-1637.2018.06.014 [22] GUO Feng, SIMONS-MORTON B G, KLAUER S E, et al. Variability in crash and near-crash risk among novice teenage drivers: a naturalistic study[J]. The Journal of Pediatrics, 2013, 163(6): 1670-1676. doi: 10.1016/j.jpeds.2013.07.025 [23] 杨曼, 吴超仲, 张晖, 等. 行车安全事件的驾驶风险影响因素研究[J]. 交通信息与安全, 2018, 36(5): 34-39. https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS201805006.htmYANG Man, WU Chao-zhong, ZHANG Hui, et al. Influencing factors of driving risk based on critical incident events[J]. Journal of Transport Information and Safety, 2018, 36(5): 34-39. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS201805006.htm [24] DAGAN E, MANO O, STEIN G P, et al. Forward collision warning with a single camera[C]//IEEE. 2004 IEEE Intelligent Vehicles Symposium. New York: IEEE, 2004: 37-42. [25] BELLA F, RUSSO R. A collision warning system for rear-end collision: a driving simulator study[J]. Procedia—Social and Behavioral Sciences, 2011, 20: 676-686. doi: 10.1016/j.sbspro.2011.08.075 [26] 王畅, 付锐, 张琼, 等. 换道预警系统中参数TTC特性研究[J]. 中国公路学报, 2015, 28(8): 91-100. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201508013.htmWANG Chang, FU Rui, ZHANG Qiong, et al. Research on parameter TTC characteristics of lane change warning system[J]. China Journal of Highway and Transport, 2015, 28(8): 91-100. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201508013.htm [27] MUHRER E, REINPRECHT K, VOLLRATH M. Driving with a partially autonomous forward collision warning system: how do drivers react[J]. Human Factors, 2012, 54(5): 698-708. doi: 10.1177/0018720812439712 -

 点击查看大图
点击查看大图
计量
- 文章访问数: 919
- HTML全文浏览量: 200
- PDF下载量: 432
- 被引次数: 0
