

Adaptive sliding mode control for two-wheeled self-balancing vehicle with input delay
-
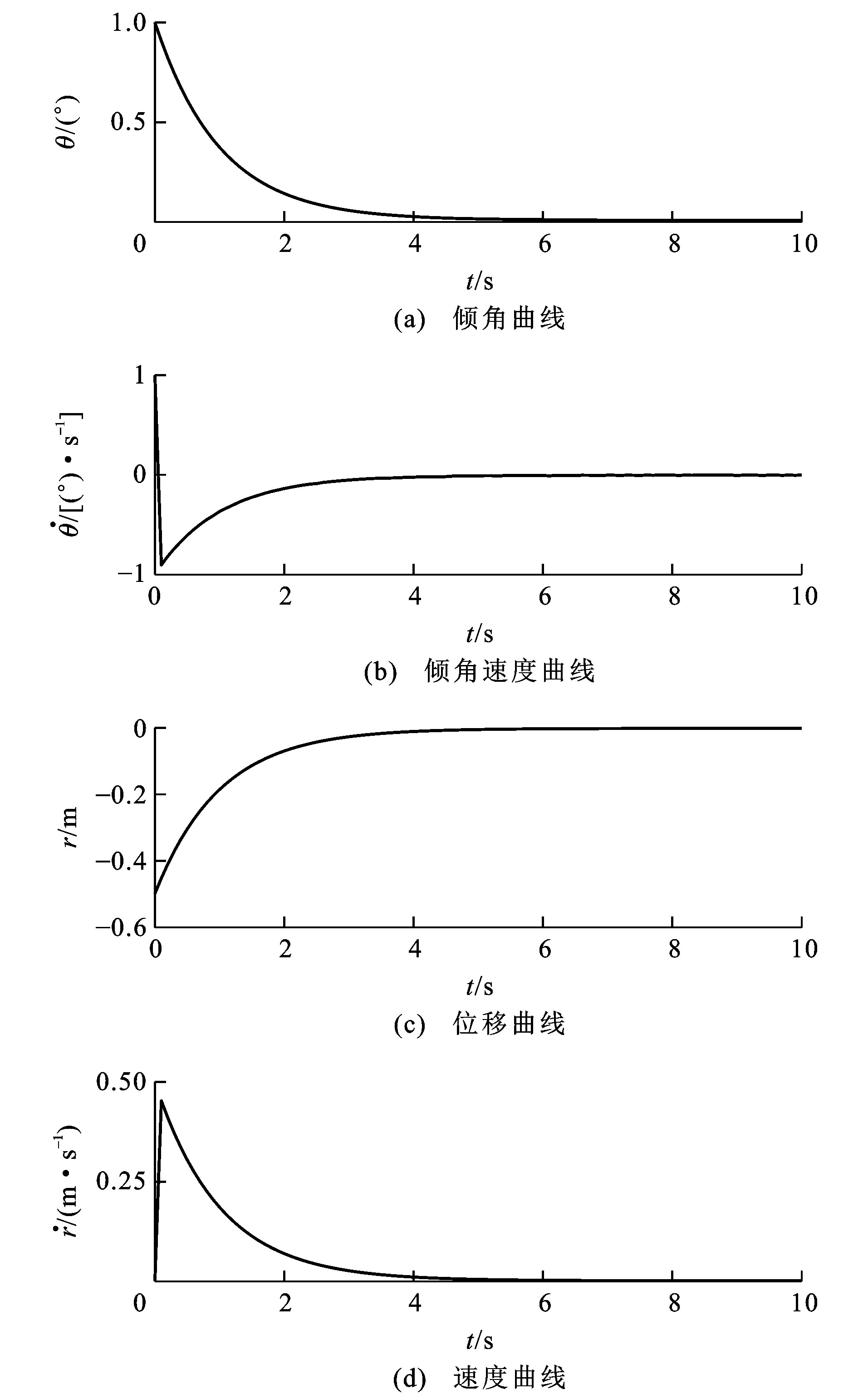
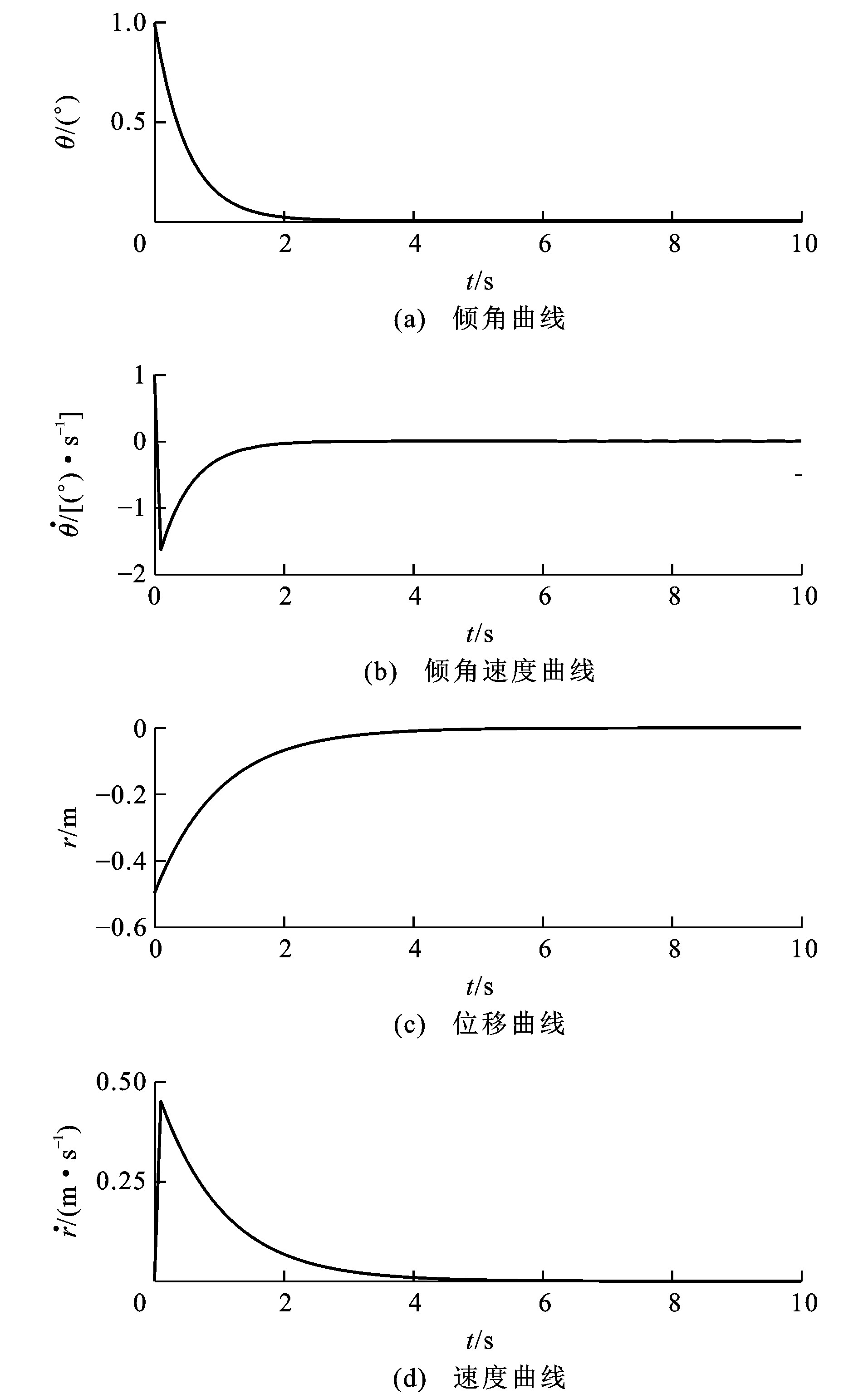
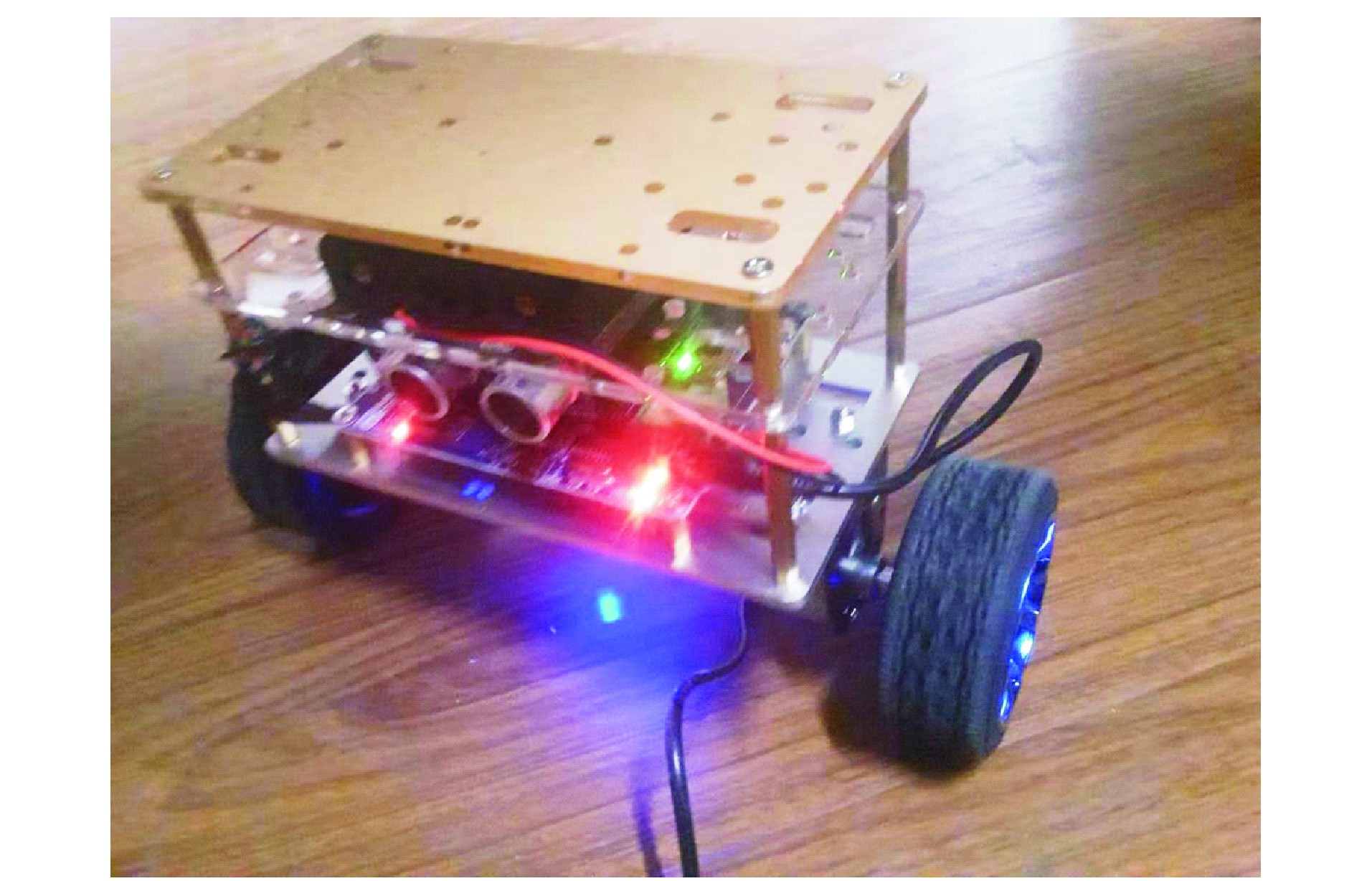
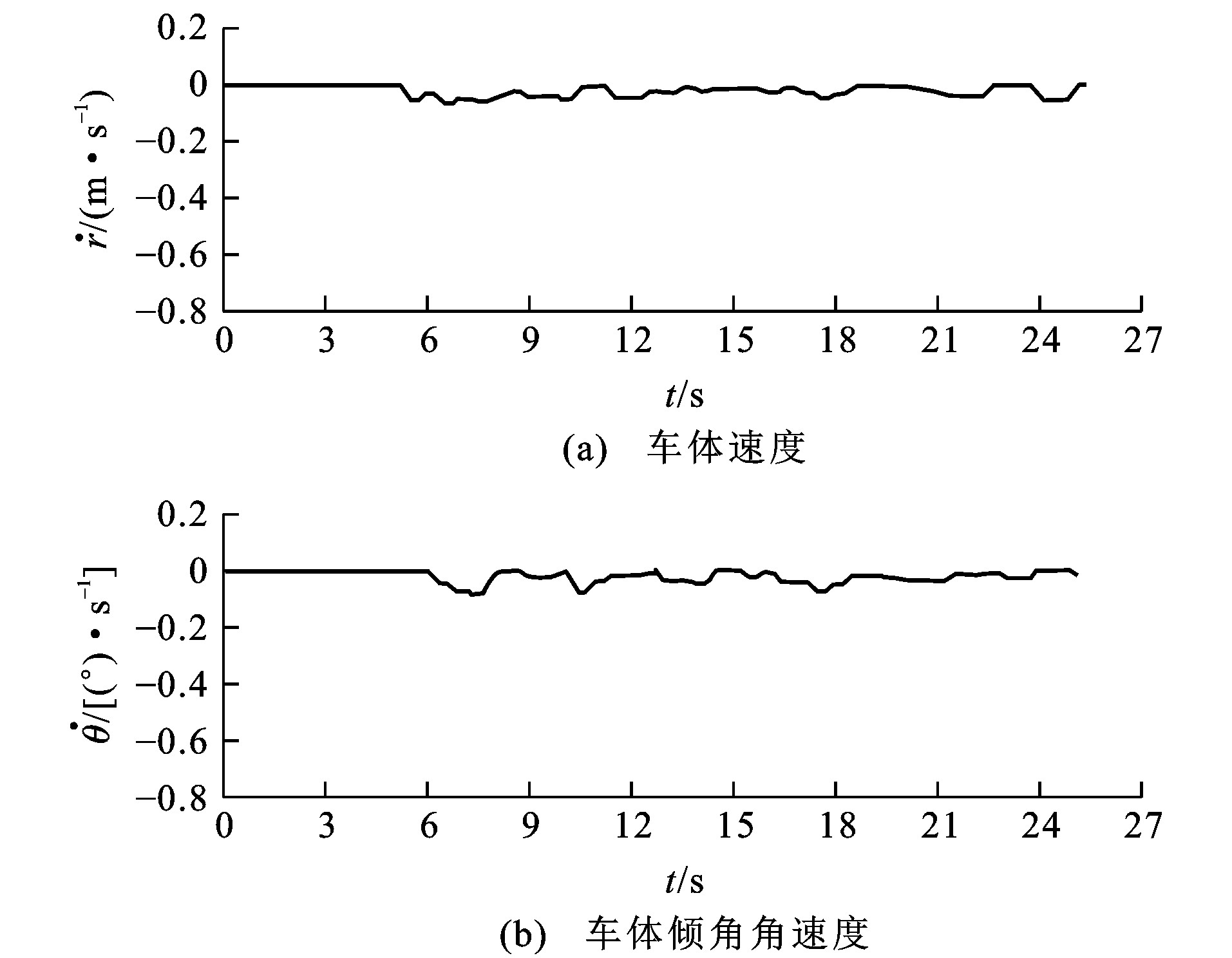
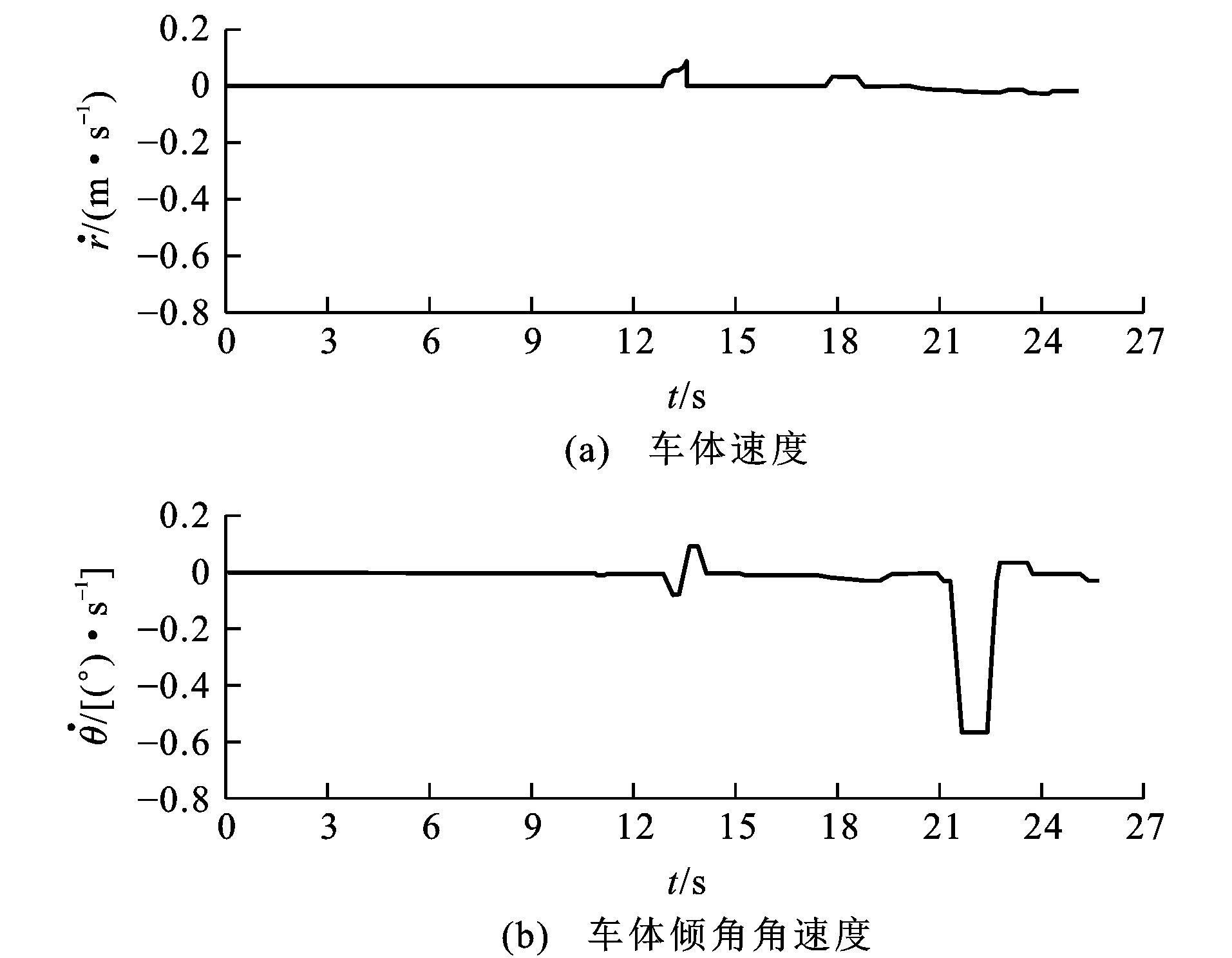
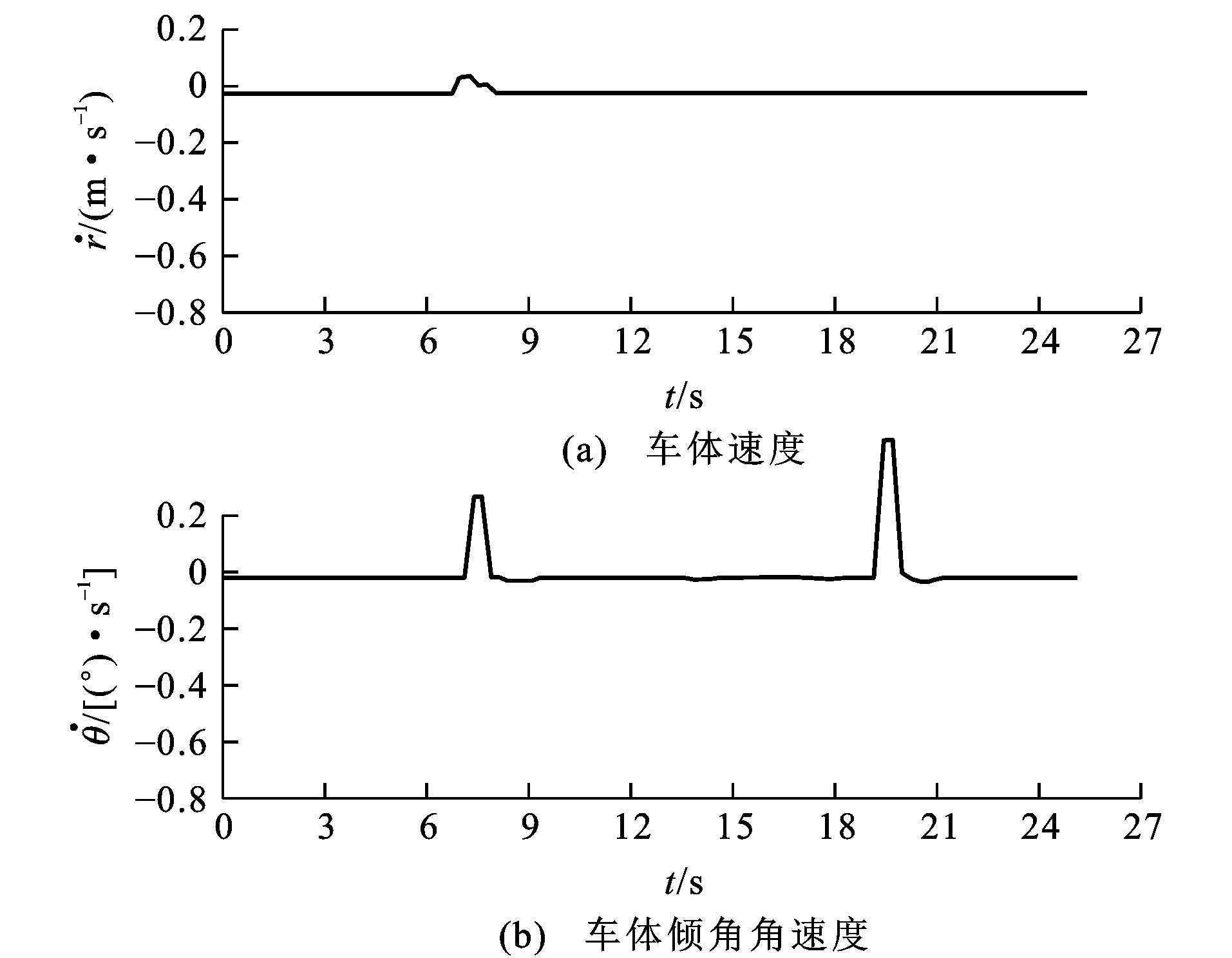
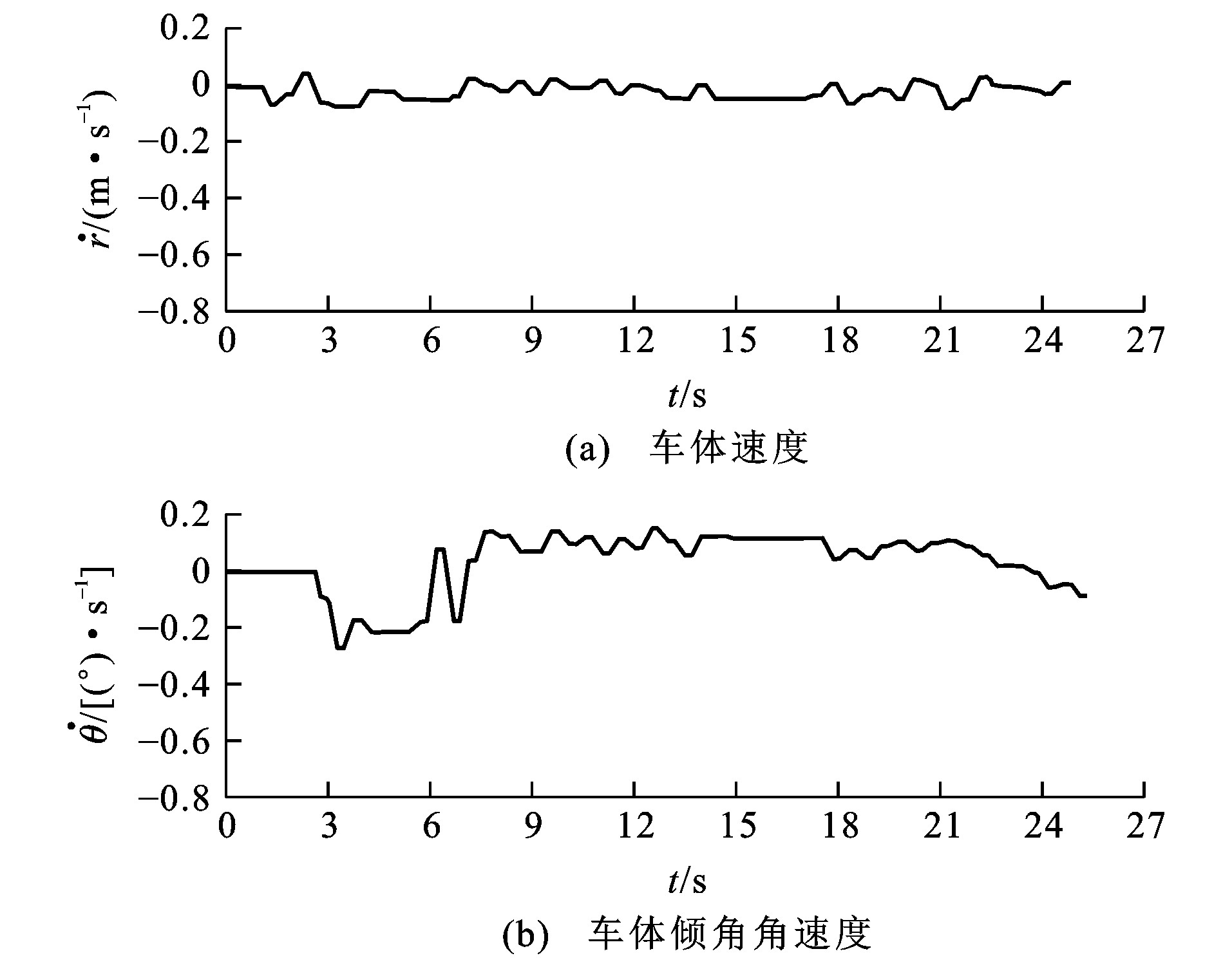
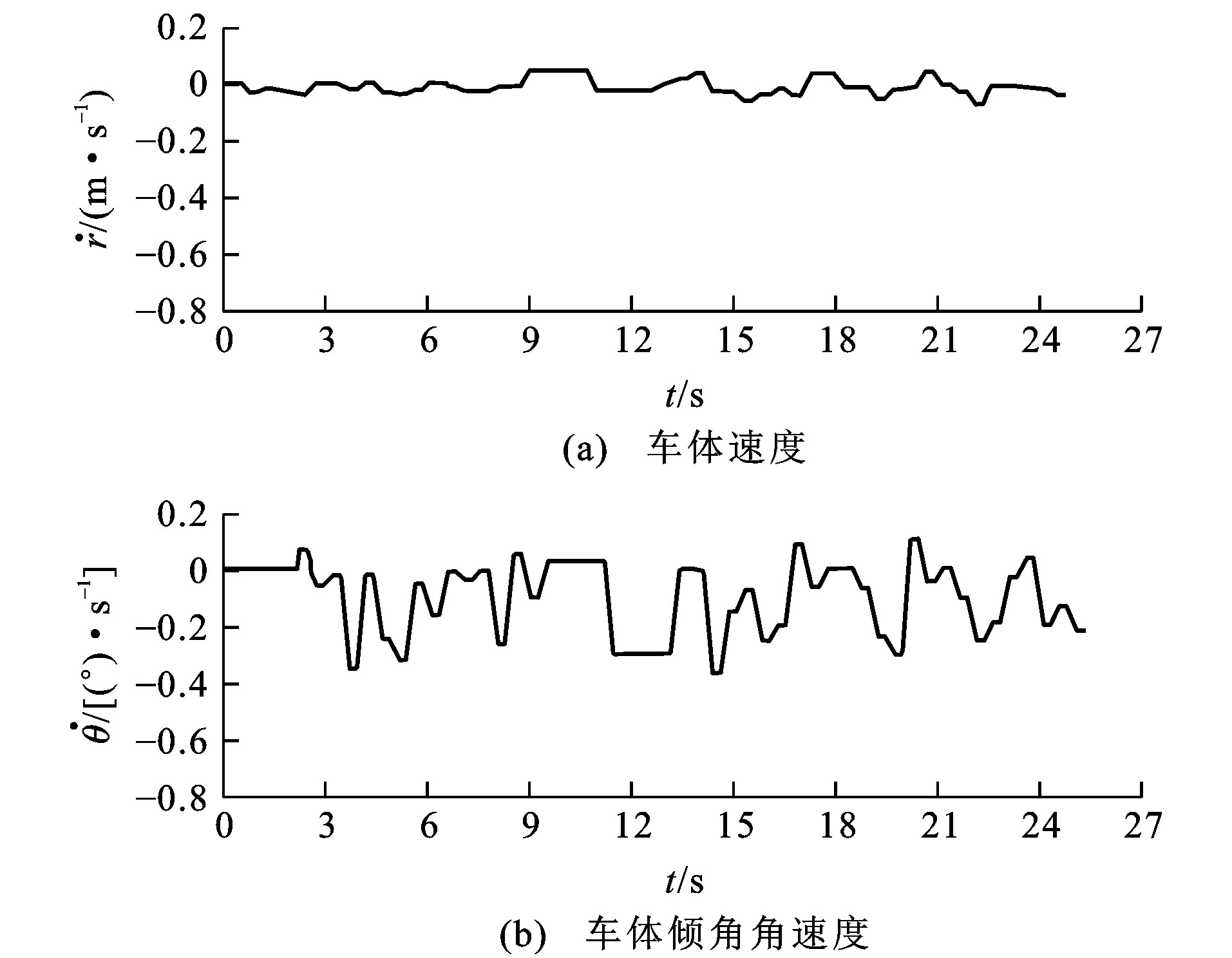
摘要: 对具有输入时滞的二轮自平衡车系统, 设计了一种自适应滑模控制算法; 采用拉格朗日函数建立二轮自平衡车系统的动力学数学模型, 并在系统模型中考虑实际中存在输入时滞, 以及在处理输入时滞时所引入的未知扰动; 对变换后的输入矩阵做奇异值分解, 进一步设计了对扰动参数具有自适应估计能力的自适应滑模控制器; 基于Lyapunov稳定性理论, 保证了闭环系统鲁棒渐近稳定; 试验采用陀螺仪MPU-6050以及加速度传感器构成小车姿态检测装置。分析结果表明: 当控制参数较小时, 系统的超调量较小, 然而系统的调节时间较长; 当控制参数较大时, 系统产生了较明显的超调量, 然而系统的调节时间缩短了; 当外加扰动较小时, 车体速度变化小于0.08 m·s-1, 倾角角速度变化小于0.6°·s-1; 当外加扰动较大时, 车体速度变化小于0.10 m·s-1, 倾角角速度变化小于0.8°·s-1; 初始倾角为5°时, 车体速度保持在0.005 m·s-1范围内, 倾角角速度保持在0.022°·s-1范围内; 初始倾角为10°时, 车体速度保持在0.007 m·s-1范围内, 倾角角速度保持在0.031°·s-1范围内。可见, 自适应滑模控制算法能在引入适量干扰和不同初始车体倾角的情况下, 使小车自主调整并迅速恢复稳定状态。Abstract: An adaptive sliding mode control algorithm was designed for two-wheeled self-balancing vehicle with input delay. The Lagrange equation was used to establish the dynamic mathematical model of two-wheeled self-balancing vehicle system. In the system model, the input delay in practice environment and the unknown disturbance in dealing with the input delay were considered. After the singular value decomposition of transformed input matrix, an adaptive sliding mode controller with adaptive estimation ability for the disturbance parameters was designed. Based on the Lyapunov stability theory, the robust asymptotic stability of closed-loop system was guaranteed. In the experiment, the gyroscope MPU-6050 and acceleration sensor were used to construct the vehicle attitude detection device.Analysis result shows that when the control parameters are small, the overshoot of the system is small, while the regulation time of the system is long. When the control parameters are large, the system has a more obvious overshoot, while the regulation time of the system is shortened. The velocity range is less than 0.08 m·s-1 and the angular velocity range is less than 0.6°·s-1 when the vehicle body is subjected to a small disturbance. The velocity range is less than 0.1 m·s-1 and the angular velocity range is less than 0.8°·s-1 when the vehicle body is subjected to a large disturbance. From the initial inclination of 5°, the velocity of vehicle is within 0.005 m·s-1 and the angular velocity of vehicle is within 0.022°·s-1. While from the initial inclination of 10°, the velocity of vehicle is within 0.007 m·s-1 and the angular velocity of vehicle is within 0.031°·s-1. So the adaptive sliding mode control algorithm can make the vehicle adjust itself and quickly return to a stable state under an appropriate interference and different initial vehicle inclinations.
-
Key words:
- road transportation /
- self-balancing vehicle /
- sliding mode control /
- delay /
- adaptive control /
- robustness
-
表 1 二轮自平衡车参数
Table 1. Parameters of two-wheeled self-balancing vehicle
参数 数值 M/kg 9 m/kg 5 l/m 0.95 R/m 0.20 J/(kg·m2) 12.00 Jw/(kg·m2) 0.13 τ/s 0.1  下载: 导出CSV
下载: 导出CSV
-
[1] ABEYGUNAWARDHANA P K W, DEFOORT M, MURAKAMI T. Self-sustaining control of two-wheel mobile manipulator using sliding mode control[C]//IEEE. The 11th IEEE International Workshop on Advanced Motion Control. New York: IEEE, 2010: 792-797. [2] IRIARTE R, AGUILAR L T, FRIDMAN L. Second order sliding mode tracking controller for inertia wheel pendulum[J]. Journal of the Franklin Institute, 2013, 350: 92-106. doi: 10.1016/j.jfranklin.2012.10.013 [3] GUO Zhao-qin, XU Jian-xin, LEE Tong-heng. Design and implementation of a new sliding mode controller on an underactuated wheeled inverted pendulum[J]. Journal of the Franklin Institute, 2014, 351: 2261-2282. doi: 10.1016/j.jfranklin.2013.02.002 [4] YUE Ming, WEI Xing, LI Zhi-jun. Adaptive sliding-mode control for two-wheeled inverted pendulum vehicle based on zero-dynamics theory[J]. Nonlinear Dynamics, 2014, 76: 459-471. doi: 10.1007/s11071-013-1139-6 [5] 李立华. 基于滑模变结构控制的二轮自平衡车系统设计及应用[D]. 武汉: 武汉科技大学, 2015.LI Li-hua. Design and application of sliding mode variable structure control for two-wheeled self-balancing vehicle system[D]. Wuhan: Wuhan University of Science and Technology, 2015. (in Chinese). [6] DAI Fu-quan, GAO Xue-shan, JIANG Shi-gong, et al. A two-wheeled inverted pendulum robot with friction compensation[J]. Mechatronics, 2015, 30: 116-125. doi: 10.1016/j.mechatronics.2015.06.011 [7] GHAFFARI A, SHARIATI A, SHAMEKHI A H. A modified dynamical formulation for two-wheeled self-balancing robots[J]. Nonlinear Dynamics, 2016, 83: 217-230. doi: 10.1007/s11071-015-2321-9 [8] ZHOU Yu-sheng, WANG Zai-hua. Robust motion control of a two-wheeled inverted pendulum with an input delay based on optimal integral sliding mode manifold[J]. Nonlinear Dynamics, 2016, 85: 2065-2074. doi: 10.1007/s11071-016-2811-4 [9] ESMAEILI N, ALFI A, KHOSRAVI H. Balancing and trajectory tracking of two-wheeled mobile robot using backstepping sliding mode control: design and experiments[J]. Journal of Intelligent and Robotic Systems, 2017, 87: 601-613. doi: 10.1007/s10846-017-0486-9 [10] CHEN Mou. Robust tracking control for self-balancing mobile robots using disturbance observer[J]. IEEE/CAA Journal of Automatica Sinica, 2017, 4(3): 458-465. doi: 10.1109/JAS.2017.7510544 [11] WANG H P, MUSTAFA G I Y, TIAN Y. Model-free fractional-order sliding mode control for an active vehicle suspension system[J]. Advances in Engineering Software, 2018, 115: 452-461. doi: 10.1016/j.advengsoft.2017.11.001 [12] CHEN Long, WANG Hai, HUANG Yun-zhi, et al. Robust hierarchical sliding mode control of a two-wheeled self-balancing vehicle using perturbation estimation[J]. Mechanical Systems and Signal Processing, 2020, 139: 1-19. [13] BENAMOR A, MESSAOUD H. Robust adaptive sliding mode control for uncertain systems with unknown time-varying delay input[J]. ISA Transactions, 2018, 79: 1-12. doi: 10.1016/j.isatra.2018.04.017 [14] LI Rong-chang, ZHANG Qing-ling. Robust H∞ sliding mode observer design for a class of Takagi-Sugeno fuzzy descriptor systems with time-varying delay[J]. Applied Mathematics and Computation, 2018, 337: 158-178. doi: 10.1016/j.amc.2018.05.008 [15] HAN Yue-qiao, KAO Yong-gui, GAO Cun-chen. Robust observer-based H∞ control for uncertain discrete singular systems with time-varying delays via sliding mode approach[J]. ISA Transactions, 2018, 80: 81-88. doi: 10.1016/j.isatra.2018.05.023 [16] AL-WAIS S, KHOO S, LEE T H, et al. Robust H∞ cost guaranteed integral sliding mode control for the synchronization problem of nonlinear tele-operation system with variable time-delay[J]. ISA Transactions, 2018, 72: 25-36. doi: 10.1016/j.isatra.2017.10.009 [17] SONG Jun, NIU Yu-gang, ZOU Yuan-yuan. Asynchronous sliding mode control of Markovian jump systems with time-varying delays and partly accessible mode detection probabilities[J]. Automatica, 2018, 93: 33-41. doi: 10.1016/j.automatica.2018.03.037 [18] HAN Yue-qiao, KAO Yong-gui, GAO Cun-chen. Robust sliding mode control for uncertain discrete singular systems with time-varying delays and external disturbances[J]. Automatica, 2017, 75: 210-216. doi: 10.1016/j.automatica.2016.10.001 [19] 吴立刚, 凌明祥, 王常虹, 等. 自适应滑模控制具有状态和输入时滞的不确定系统[J]. 电机与控制学报, 2005, 9(5): 443-447, 451. doi: 10.3969/j.issn.1007-449X.2005.05.009WU Li-gang, LING Ming-xiang, WANG Chang-hong, et al. Adaptive sliding mode control of uncertain linear systems with state and input delays[J]. Electric Machines and Control, 2005, 9(5): 443-447, 451. (in Chinese). doi: 10.3969/j.issn.1007-449X.2005.05.009 [20] QIAN Qing-wen, WU Jun-feng, WANG Zhe. Optimal path planning for two-wheeled self-balancing vehicle pendulum robot based on quantum-behaved particle swarm optimization algorithm[J]. Personal and Ubiquitous Computing, 2019, 23: 393-403. doi: 10.1007/s00779-019-01216-1 [21] WEISS A, FADIDA E, HANAN U B. Optimizing step climbing by two connected wheeled inverted pendulum robots[J]. Procedia Manufacturing, 2018, 21: 236-242. doi: 10.1016/j.promfg.2018.02.116 [22] YUE Ming, WANG Shuang, SUN Jian-zhong. Simultaneous balancing and trajectory tracking control for two-wheeled inverted pendulum vehicles: a composite control approach[J]. Neurocomputing, 2016, 191: 44-54. doi: 10.1016/j.neucom.2016.01.008 [23] REN T J, CHEN T C, CHEN C J. Motion control for a two-wheeled vehicle using a self-tuning PID controller[J]. Control Engineering Practice, 2008, 16: 365-375. doi: 10.1016/j.conengprac.2007.05.007 [24] MOEZI S A, ZAKERI E, EGHTESAD M. Optimal adaptive interval type-2 fuzzy fractional-order backstepping sliding mode control method for some classes of nonlinear systems[J]. ISA Transactions, 2019, 93: 23-39. doi: 10.1016/j.isatra.2019.03.006 [25] LIU Heng, WANG Hong-xing, CAO Jin-de, et al. Composite learning adaptive sliding mode control of fractional-order nonlinear systems with actuator faults[J]. Journal of the Franklin Institute, 2019, 356: 9580-9599. doi: 10.1016/j.jfranklin.2019.02.042 [26] HUANG Sun-hua, ZHOU Bin, BU Si-qi, et al. Robust fixed-time sliding mode control for fractional-order nonlinear hydro-turbine governing system[J]. Renewable Energy, 2019, 139: 447-458. doi: 10.1016/j.renene.2019.02.095 [27] SONG Shuai, ZHANG Bao-yong, SONG Xiao-na, et al. Fractional-order adaptive neuro-fuzzy sliding mode H∞ control for fuzzy singularly perturbed systems[J]. Journal of the Franklin Institute, 2019, 356: 5027-5048. [28] ZAKERI E, MOEZI S A, EGHTESAD M. Optimal interval type-2 fuzzy fractional order super twisting algorithm: a second order sliding mode controller for fully-actuated and under-actuated nonlinear systems[J]. ISA Transactions, 2019, 85: 13-32. doi: 10.1016/j.isatra.2018.10.013 [29] 沈智鹏, 代昌盛, 张宁. 欠驱动船舶自适应迭代滑模轨迹跟踪控制[J]. 交通运输工程学报, 2017, 17(6): 125-134. http://transport.chd.edu.cn/article/id/201706014SHEN Zhi-peng, DAI Chang-sheng, ZHANG Ning. Trajectory tracking control of underactuated ship based on adaptive iterative sliding mode[J]. Journal of Traffic and Transportation Engineering, 2017, 17(6): 125-134. (in Chinese). http://transport.chd.edu.cn/article/id/201706014 [30] 田翔, 何仁. 混合动力客车模式切换多控制器的协调控制[J]. 交通运输工程学报, 2017, 17(6): 150-158. http://transport.chd.edu.cn/article/id/201706016TIAN Xiang, HE Ren. Mode transition coordination control of hybrid electric bus based on multiple controller[J]. Journal of Traffic and Transportation Engineering, 2017, 17(6): 150-158. (in Chinese). http://transport.chd.edu.cn/article/id/201706016 -

 点击查看大图
点击查看大图
图(14) / 表(1)
计量
- 文章访问数: 715
- HTML全文浏览量: 69
- PDF下载量: 320
- 被引次数: 0
