

-
摘要: 为了分析自动驾驶车辆对交通流宏观特性的影响, 以手动驾驶车辆与自动驾驶车辆构成的混合交通流为研究对象, 提出了不同自动驾驶车辆比例下的混合交通流元胞传输模型(CTM); 应用Newell跟驰模型作为手动驾驶车辆跟驰模型, 应用PATH实验室真车测试标定的模型作为自动驾驶车辆跟驰模型; 计算了手动驾驶与自动驾驶车辆跟驰模型在均衡态的车头间距-速度函数关系式, 推导了不同自动驾驶车辆比例下的混合交通流基本图模型, 计算了混合交通流在不同自动驾驶车辆比例下的最大通行能力、最大拥挤密度以及反向波速等特征量, 依据同质交通流CTM理论建立了不同自动驾驶车辆比例下的混合交通流CTM; 选取移动瓶颈问题进行算例分析, 应用混合交通流CTM计算了不同自动驾驶车辆比例下的移动瓶颈影响时间, 应用跟驰模型对移动瓶颈问题进行微观数值仿真, 分析了混合交通流CTM计算结果与跟驰模型微观仿真结果之间的误差, 验证了混合交通流CTM的准确性。研究结果表明: 混合交通流CTM能够有效计算移动瓶颈的影响时间, 在不同自动驾驶车辆比例下, 混合交通流CTM计算结果与跟驰模型微观仿真结果的误差均在52 s以下, 相对误差均小于10%, 表明了混合交通流CTM在实际应用中的准确性; 混合交通流CTM体现了从微观到宏观的研究思路, 基于微观跟驰模型与目前逐步开展的小规模自动驾驶真车试验之间的关联性, 混合交通流CTM能够较真实地反映未来不同自动驾驶车辆比例下单车道混合交通流演化过程, 增加了模型研究的应用价值。Abstract: In order to analyze the impacts of automated driving vehicles on the macroscopic traffic flow characteristics, the mixed traffic flow with manual driving vehicles and automated driving vehicles was considered as the study objective, and the cell transmission model(CTM) of mixed traffic flow under different proportions of automated driving vehicles was proposed.The car-following model proposed by Newell was used for the car-following model of manual driving vehicles, while the model calibrated by PATH program used the real vehicle experiments was employed for the car-following model of automated driving vehicles.The function relation of equilibrium space headway-speed was calculated according to the car-following models of manual and automated driving vehicles.The fundamental diagram model of mixed traffic flow was derived under different proportions of automated driving vehicles. In addition, the characteristic quantities such as the maximum capacity, the maximum jam density, and backward wave speed were calculated for the mixed traffic flow under different proportions of automated driving vehicles. Based on the CTM theory of homogenous traffic flow, the CTM of mixed traffic flow was proposed under different proportions of automated driving vehicles. The moving bottleneck problem was selected for example analysis, the influence times of moving bottleneck under different proportions of automated driving vehicles were calculated by using the mixed traffic flow CTM. The car-following models were used for the microcosmic numerical simulation on the moving bottleneck problem. The errors between the calculation results of the mixed traffic flow CTM and the microcosmic simulation results of car-following models were analyzed. The accuracy of mixed traffic flow CTM was validated. Research result shows that the proposed mixed traffic flow CTM can effectively calculate the influence time of moving bottleneck. Under different proportions of automated driving vehicles, the errors between the calculation results of the mixed traffic flow CTM and the microcosmic simulation results of car-following models are all below 52 s, and the relative errors are all below 10%, which indicates the accuracy of the proposed mixed traffic flow CTM in actual application. The mixed traffic flow CTM reflects the study idea from microcosmic to macroscopic. There are relationships between the microcosmic car-following models and the small-scale automated driving vehicle experiments being gradually implemented. The mixed traffic flow CTM can truthfully reflect the evolutionary process of mixed traffic flow on single lane in the background of automated driving under different proportions in the future, which enhances the application value of the model research.
-
Key words:
- traffic flow /
- cell transmission model /
- automated driving /
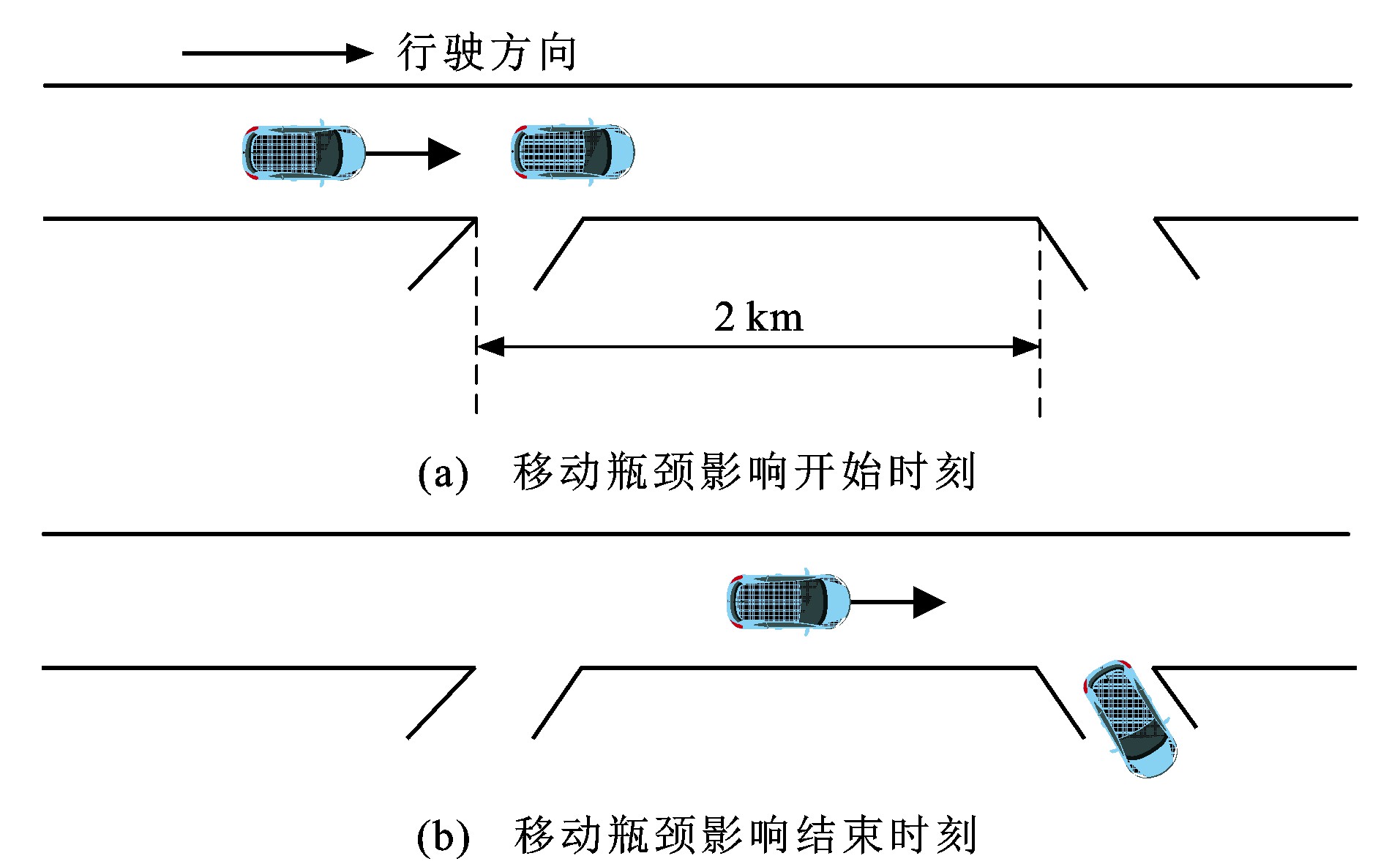
- moving bottleneck /
- influence time
-

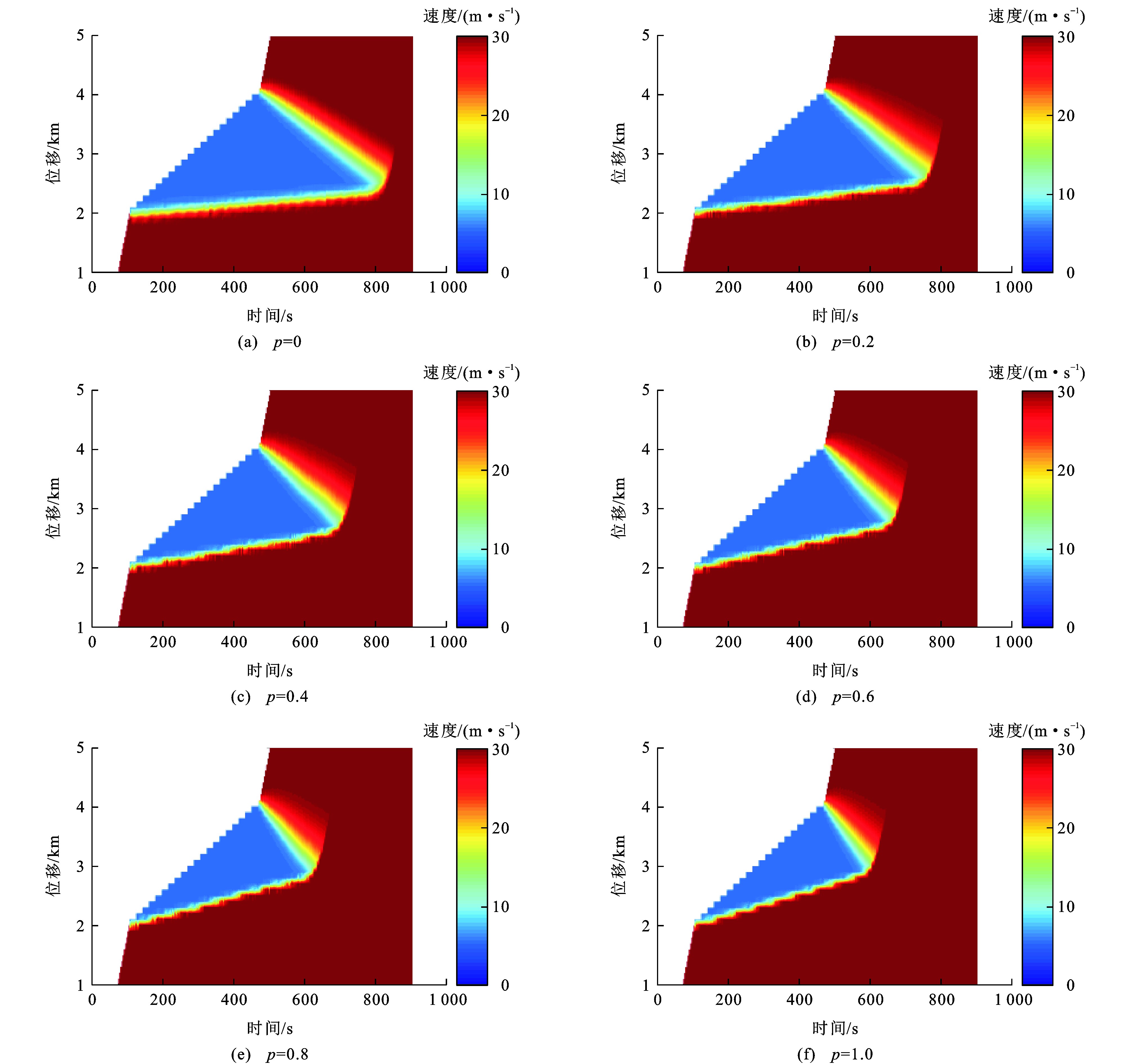
图 5 基于跟驰模型微观仿真的时空速度热力分布
Figure 5. Heat distributions of speed over time and space based on microscopic simulations using car-following models
表 1 基于CTM的移动瓶颈影响时间
Table 1. Influence times of moving bottleneck based on CTM
自动驾驶车辆比例 影响时间/s 降低百分比/% 0.0 711 0.1 675 5.063 3 0.2 645 9.282 7 0.3 618 13.080 2 0.4 591 16.877 6 0.5 567 20.253 2 0.6 546 23.206 8 0.7 525 26.160 3 0.8 510 28.270 0 0.9 492 30.801 7 1.0 474 33.333 3  下载: 导出CSV
下载: 导出CSV
表 2 基于跟驰模型微观仿真的移动瓶颈影响时间
Table 2. Influence times of moving bottleneck based on microscopic simulations using car-following models
自动驾驶车辆比例 影响时间/s 降低百分比/% 0.0 738 0.1 715 3.116 5 0.2 687 6.910 6 0.3 648 12.195 1 0.4 624 15.447 2 0.5 610 17.344 2 0.6 588 20.325 2 0.7 576 21.951 2 0.8 550 25.474 3 0.9 538 27.100 3 1.0 526 28.726 3
下载: 导出CSV
表 3 CTM结果与微观仿真结果的移动瓶颈影响时间误差
Table 3. Errors of moving bottleneck influence time between CTM results and microscopic simulation results
自动驾驶车辆比例 绝对误差/s 相对误差/% 0.0 27 3.658 5 0.1 40 5.594 4 0.2 42 6.113 5 0.3 30 4.629 6 0.4 33 5.288 5 0.5 43 7.049 2 0.6 42 7.142 9 0.7 51 8.854 2 0.8 40 7.272 7 0.9 46 8.550 2 1.0 52 9.885 9
下载: 导出CSV
-
[1] 《中国公路学报》编辑部. 中国交通工程学术研究综述·2016[J]. 中国公路学报, 2016, 29(6): 1-161.Editorial Department of China Journal of Highway and Transport. Review on China's traffic engineering research progress: 2016[J]. China Journal of Highway and Transport, 2016, 29(6): 1-161. (in Chinese). [2] 秦严严, 王昊, 王炜, 等. 自适应巡航控制车辆跟驰模型综述[J]. 交通运输工程学报, 2017, 17(3): 121-130. doi: 10.3969/j.issn.1671-1637.2017.03.013QIN Yan-yan, WANG Hao, WANG Wei, et al. Review of car-following models of adaptive cruise control[J]. Journal of Traffic and Transportation Engineering, 2017, 17(3): 121-130. (in Chinese). doi: 10.3969/j.issn.1671-1637.2017.03.013 [3] WANG Ren, LI Yan-ning, WORK D B. Comparing traffic state estimators for mixed human and automated traffic flows[J]. Transportation Research Part C: Emerging Technologies, 2017, 78: 95-110. doi: 10.1016/j.trc.2017.02.011 [4] KESTING A, TREIBER M, SCHONHOF M, et al. Adaptive cruise control design for active congestion avoidance[J]. Transportation Research Part C: Emerging Technologies, 2008, 16(6): 668-683. doi: 10.1016/j.trc.2007.12.004 [5] SHLADOVER S, SU Dong-yan, LU Xiao-yun. Impacts of cooperative adaptive cruise control on freeway traffic flow[J]. Transportation Research Record, 2012(2324): 63-70. [6] GONG Si-yuan, SHEN Jing-lai, DU Li-li. Constrained optimization and distributed computation based car following control of a connected and autonomous vehicle platoon[J]. Transportation Research Part B: Methodological, 2016, 94: 314-334. doi: 10.1016/j.trb.2016.09.016 [7] JIA Dong-yao, NGODUY D. Platoon based cooperative driving model with consideration of realistic inter-vehicle communication[J]. Transportation Research Part C: Emerging Technologies, 2016, 68: 245-264. doi: 10.1016/j.trc.2016.04.008 [8] JIA Dong-yao, NGODUY D. Enhanced cooperative car-following traffic model with the combination of V2V and V2I communication[J]. Transportation Research Part B: Methodological, 2016, 90: 172-191. doi: 10.1016/j.trb.2016.03.008 [9] SU Peng, MA Jia-qi, LOCHRANE T W P, et al. The integrated adaptive cruise control car-following model based on trajectory data[C]//TRB. Proceedings of the 95rd Annual Meeting of the Transportation Research Board. Washington DC: TRB, 2016: 1-17. [10] PLOEG J, SEMSAR-KAZEROONI E, LIJSTER G, et al. Graceful degradation of cooperative adaptive cruise control[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(1): 488-497. doi: 10.1109/TITS.2014.2349498 [11] MILANES V, SHLADOVER S E, SPRING J, et al. Cooperative adaptive cruise control in real traffic situations[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(1): 296-305. doi: 10.1109/TITS.2013.2278494 [12] MILANES V, SHLADOVER S E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data[J]. Transportation Research Part C: Emerging Technologies, 2014, 48: 285-300. doi: 10.1016/j.trc.2014.09.001 [13] HOOGENDOORN R, VAN AREM B, HOOGENDOORN S. Automated driving, traffic flow efficiency, and human factors: literature review[J]. Transportation Research Record, 2014(2422): 113-120. [14] HOOGENDOORN S P, BOVY P H L. Continuum modeling of multiclass traffic flow[J]. Transportation Research Part B: Methodological, 2000, 34(2): 123-146. doi: 10.1016/S0191-2615(99)00017-X [15] NGODUY D. Platoon-based macroscopic model for intelligent traffic flow[J]. Transportmetrica B: Transport Dynamics, 2013, 1(2): 153-169. doi: 10.1080/21680566.2013.826150 [16] JIN Wen-Long. On the equivalence between continuum and car-following models of traffic flow[J]. Transportation Research Part B: Methodological, 2016, 93: 543-559. doi: 10.1016/j.trb.2016.08.007 [17] 秦严严, 王昊, 王炜, 等. 混有CACC车辆和ACC车辆的异质交通流基本图模型[J]. 中国公路学报, 2017, 30(10): 127-136. doi: 10.3969/j.issn.1001-7372.2017.10.016QIN Yan-yan, WANG Hao, WANG Wei, et al. Fundamental diagram of heterogeneous traffic flow mixed with cooperative adaptive cruise control vehicles and adaptive cruise control vehicles[J]. China Journal of Highway and Transport, 2017, 30(10): 127-136. (in Chinese). doi: 10.3969/j.issn.1001-7372.2017.10.016 [18] 秦严严, 王昊, 王炜. 智能网联环境下的混合交通流LWR模型[J]. 中国公路学报, 2018, 31(11): 147-156. doi: 10.3969/j.issn.1001-7372.2018.11.016QIN Yan-yan, WANG Hao, WANG Wei. LWR model for mixed traffic flow in connected and autonomous vehicular environments[J]. China Journal of Highway and Transport, 2018, 31(11): 147-156. (in Chinese). doi: 10.3969/j.issn.1001-7372.2018.11.016 [19] DAGANZO C F. The cell transmission model: a dynamic representation of highway traffic consistent with the hydrodynamic theory[J]. Transportation Research Part B: Methodological, 1994, 28(4): 269-287. doi: 10.1016/0191-2615(94)90002-7 [20] LEVIN M W, BOYLES S D. A multiclass cell transmission model for shared human and autonomous vehicle roads[J]. Transportation Research Part C: Emerging Technologies, 2016, 62: 103-116. doi: 10.1016/j.trc.2015.10.005 [21] QIN Yan-yan, WANG Hao. Cell transmission model for mixed traffic flow with connected and autonomous vehicles[J]. Journal of Transportation Engineering, Part A: Systems, 2019, 145(5): 04019014-1-8. doi: 10.1061/JTEPBS.0000238 [22] TIAPRASERT K, ZHANG Yun-long, ASWAKUL C, et al. Closed-form multiclass cell transmission model enhanced with overtaking, lane-changing, and first-in first-out properties[J]. Transportation Research Part C: Emerging Technologies, 2017, 85: 86-110. doi: 10.1016/j.trc.2017.09.008 [23] NEWELL G F. A simplified car-following theory: a lower order model[J]. Transportation Research Part B: Methodological, 2002, 36(3): 195-205. doi: 10.1016/S0191-2615(00)00044-8 [24] 王殿海, 金盛. 车辆跟驰行为建模的回顾与展望[J]. 中国公路学报, 2012, 25(1): 115-127. doi: 10.3969/j.issn.1001-7372.2012.01.018WANG Dian-hai, JIN Sheng. Review and outlook of modeling of car following behavior[J]. China Journal of Highway and Transport, 2012, 25(1): 115-127. (in Chinese). doi: 10.3969/j.issn.1001-7372.2012.01.018 [25] TREIBER M, HENNECKE A, HELBING D. Congested traffic states in empirical observations and microscopic simulations[J]. Physical Review E, 2000, 62(2): 1805-1824. doi: 10.1103/PhysRevE.62.1805 [26] JIANG Rui, WU Qing-song, ZHU Zuo-jin. Full velocity difference model for a car-following theory[J]. Physical Review E, 2001, 64: 017101-1-4. doi: 10.1103/PhysRevE.64.017101 [27] BANDO M, HASEBE K, NAKAYAMA A, et al. Dynamical model of traffic congestion and numerical simulation[J]. Physical Review E, 1995, 51(2): 1035-1042. doi: 10.1103/PhysRevE.51.1035 [28] BRACKSTONE M, MCDONALD M. Car-following: a historical review[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 1999, 2: 181-196. doi: 10.1016/S1369-8478(00)00005-X [29] ZHANG H M, KIM T. A car-following theory for multiphase vehicular traffic flow[J]. Transportation Research Part B: Methodological, 2005, 39: 385-399. [30] AHN S, CASSIDY M J, LAVAL J. Verification of a simplified car-following theory[J]. Transportation Research Part B: Methodological, 2004, 38(5): 431-440. doi: 10.1016/S0191-2615(03)00074-2 [31] NI Dai-heng, LEONARD J D, JIA Chao-qun, et al. Vehicle longitudinal control and traffic stream modeling[J]. Transportation Science, 2015, 50(3): 1016-1031. -


 点击查看大图
点击查看大图
计量
- 文章访问数: 1460
- HTML全文浏览量: 232
- PDF下载量: 509
- 被引次数: 0
