

-
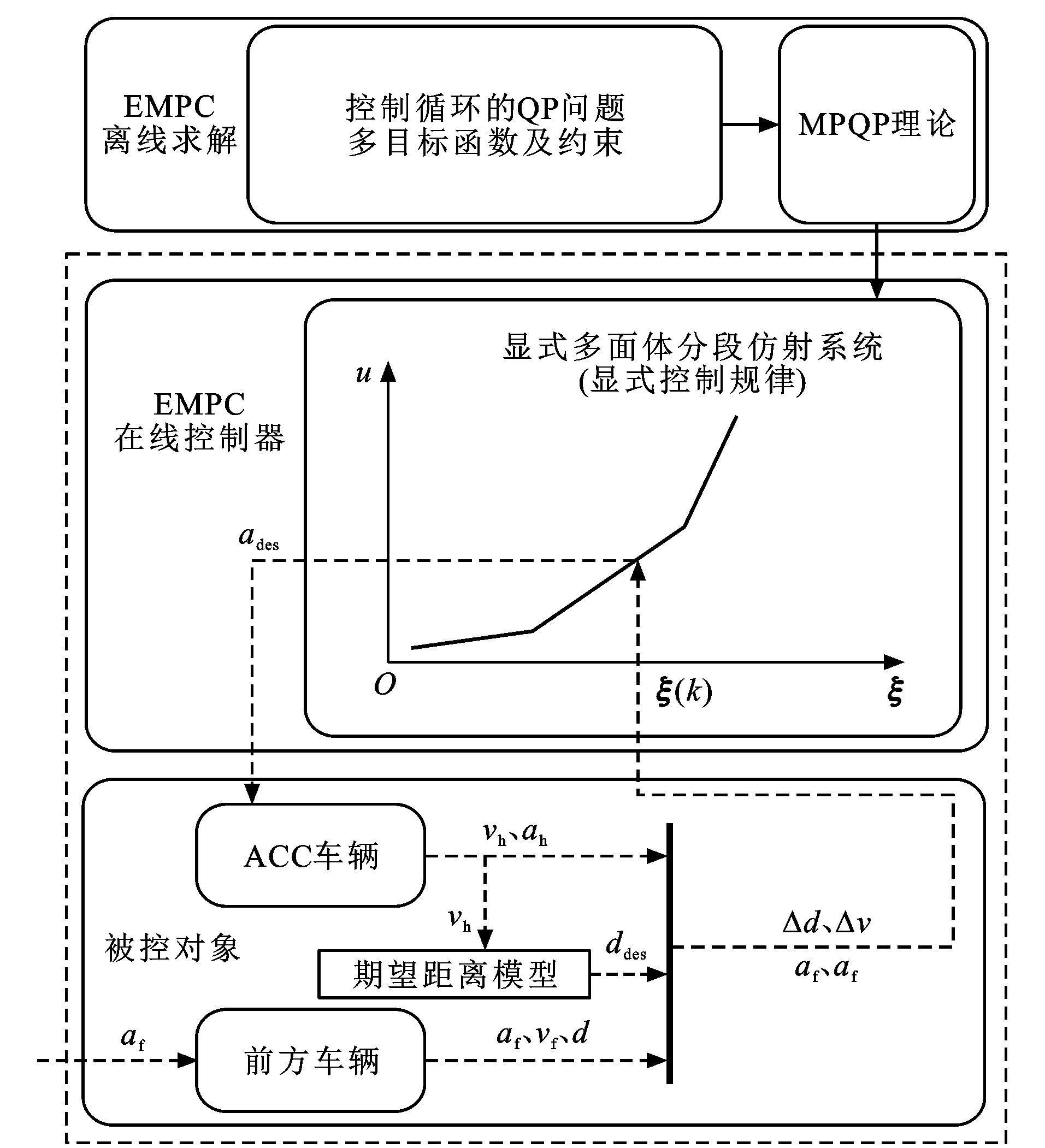
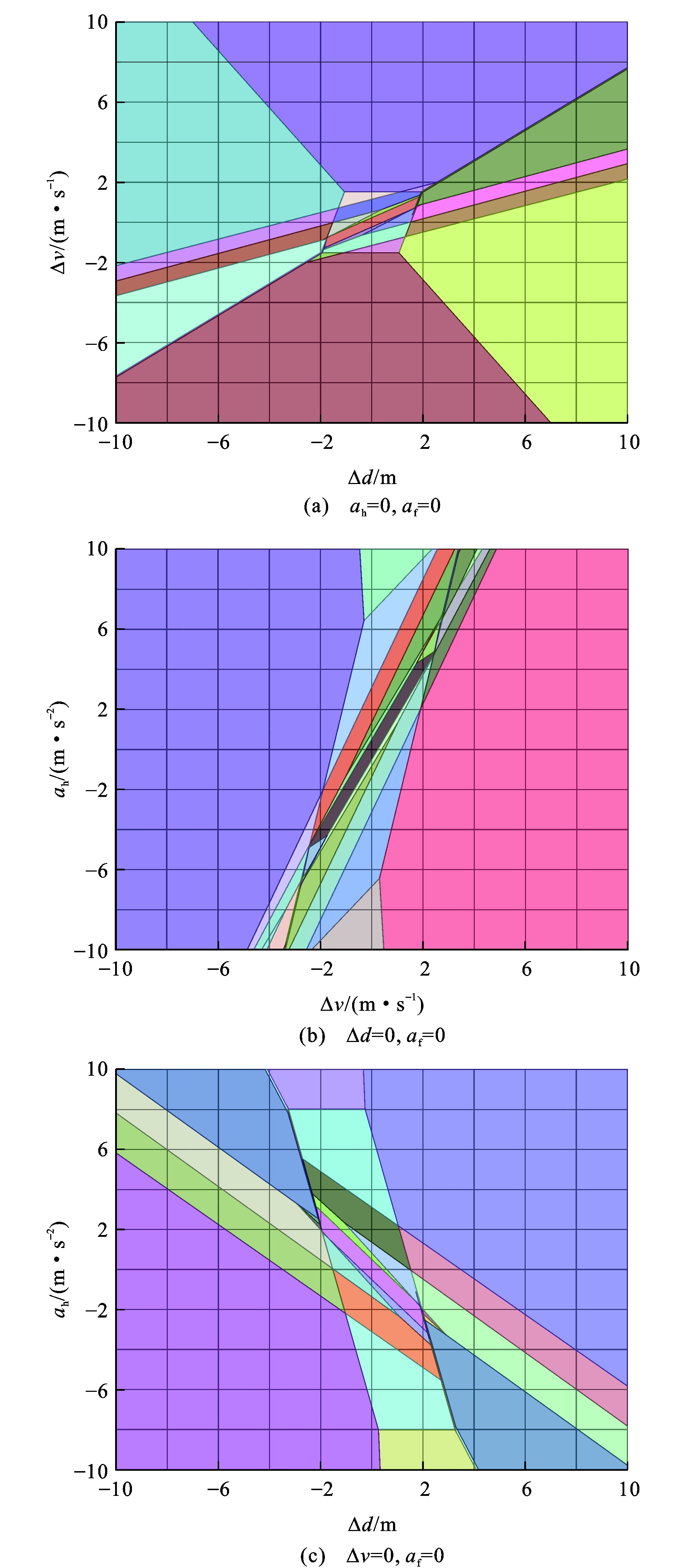
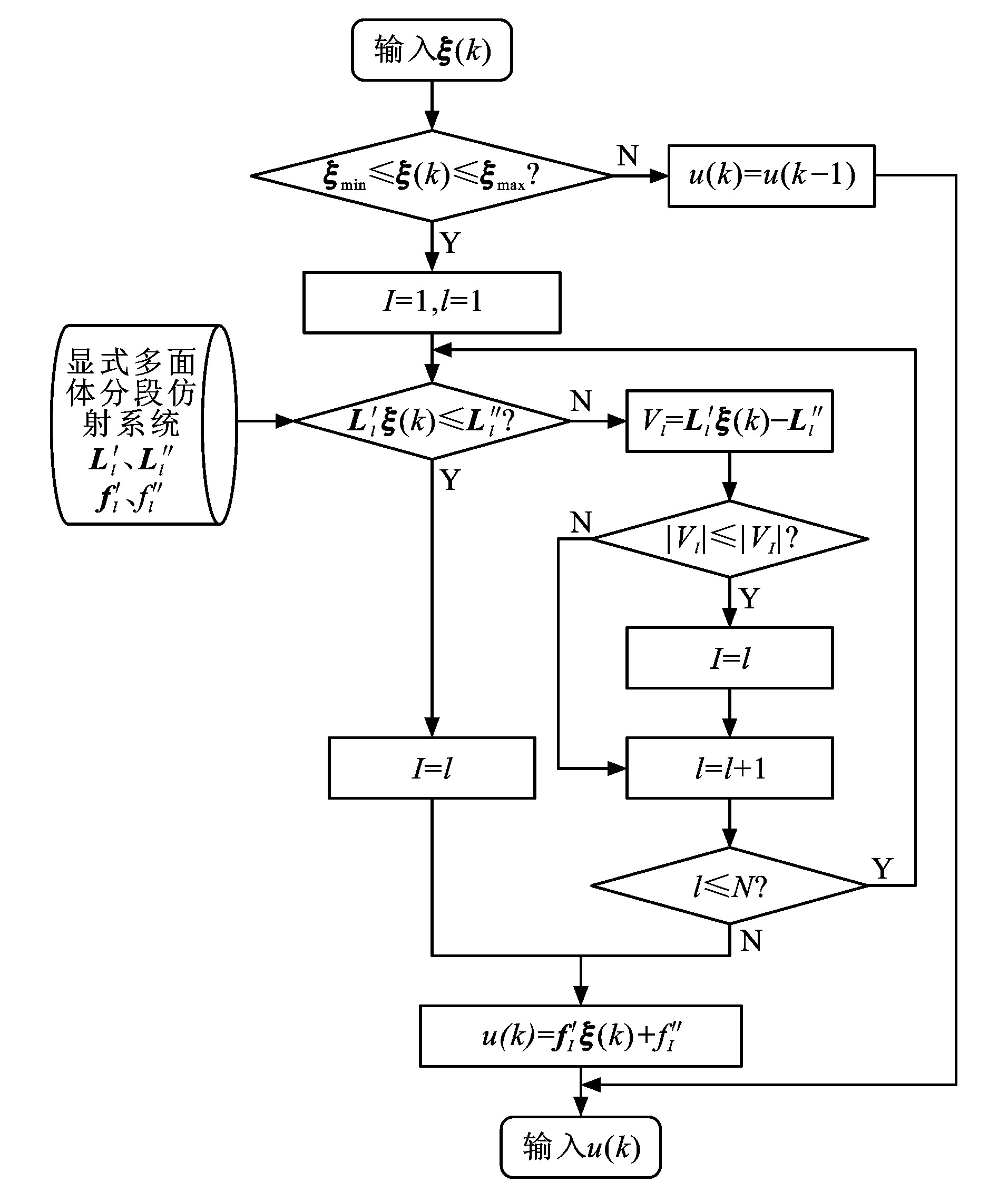
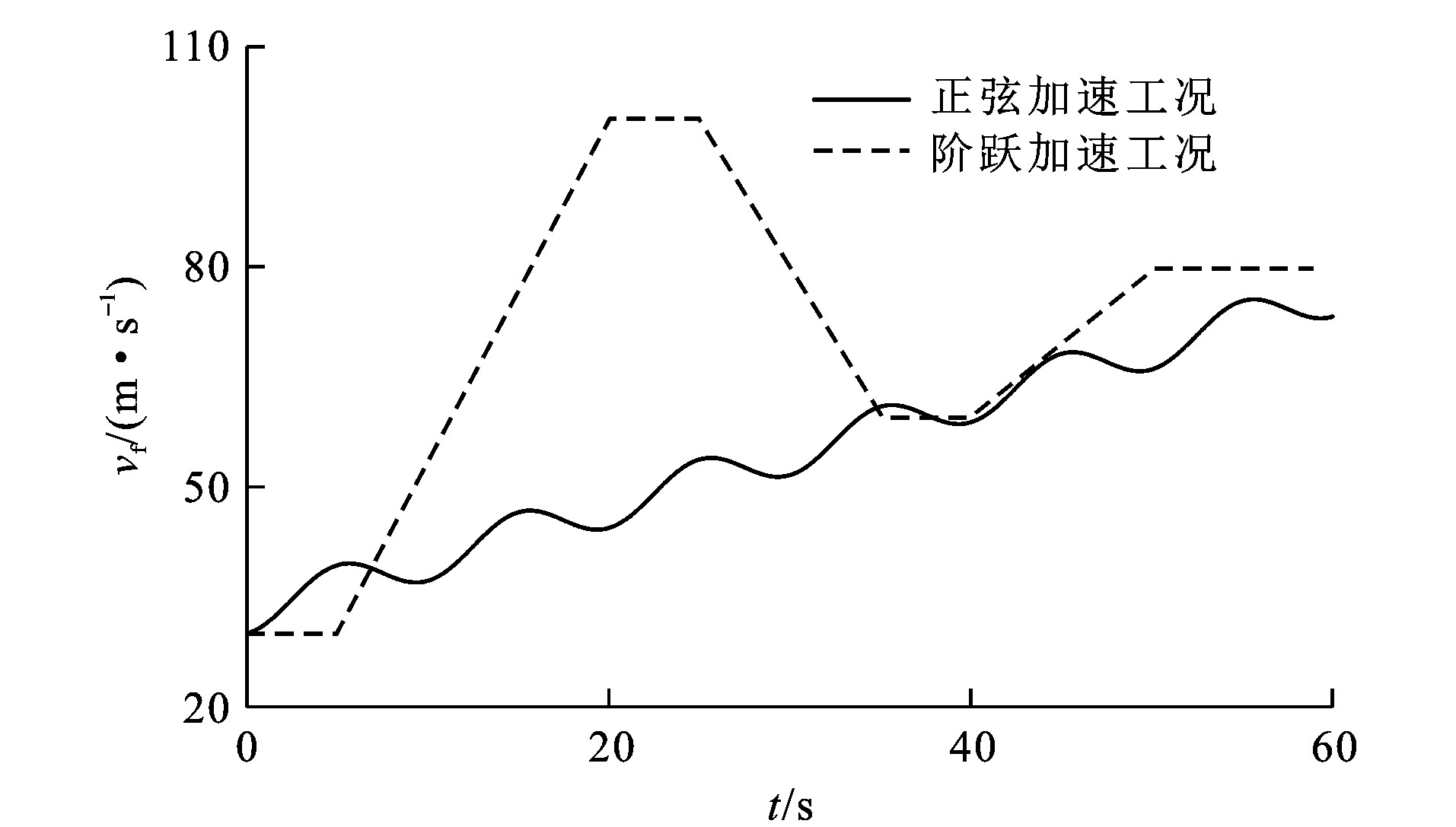
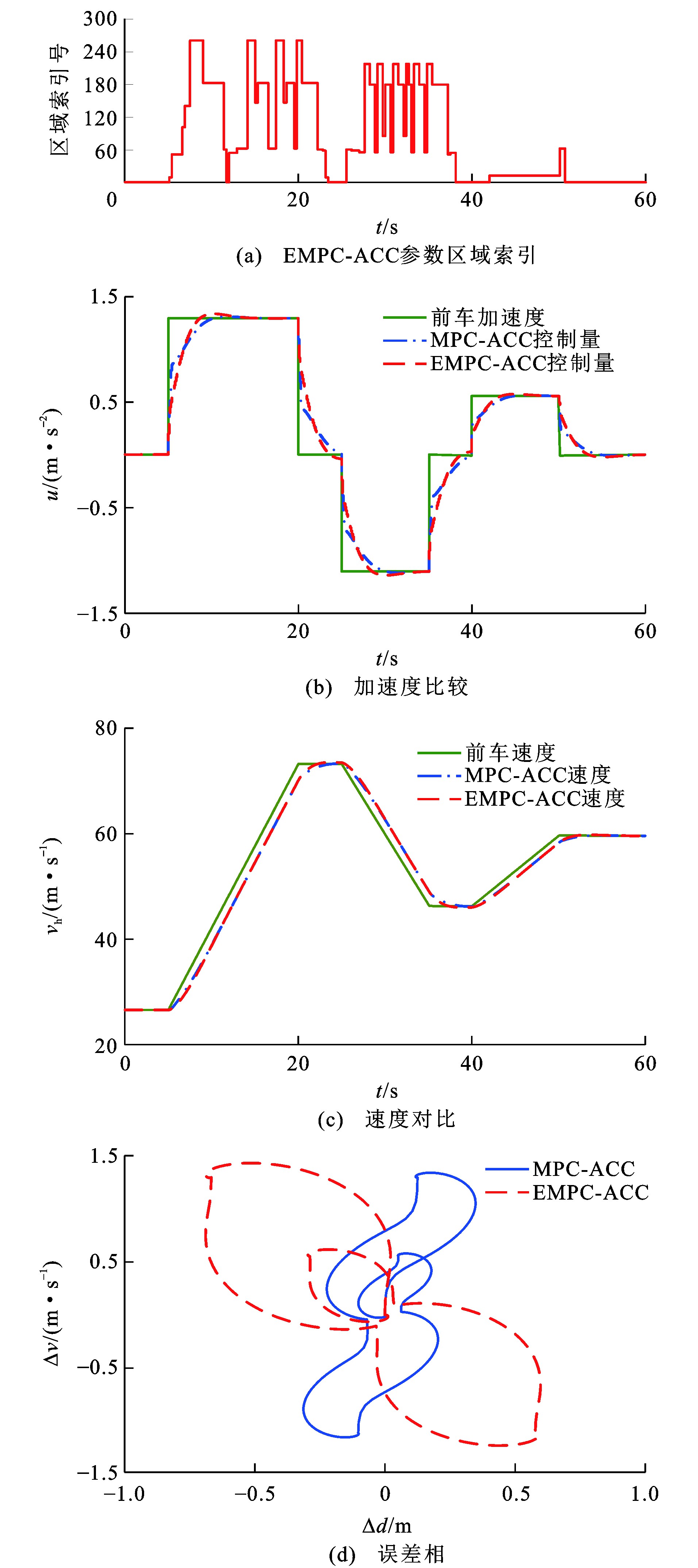
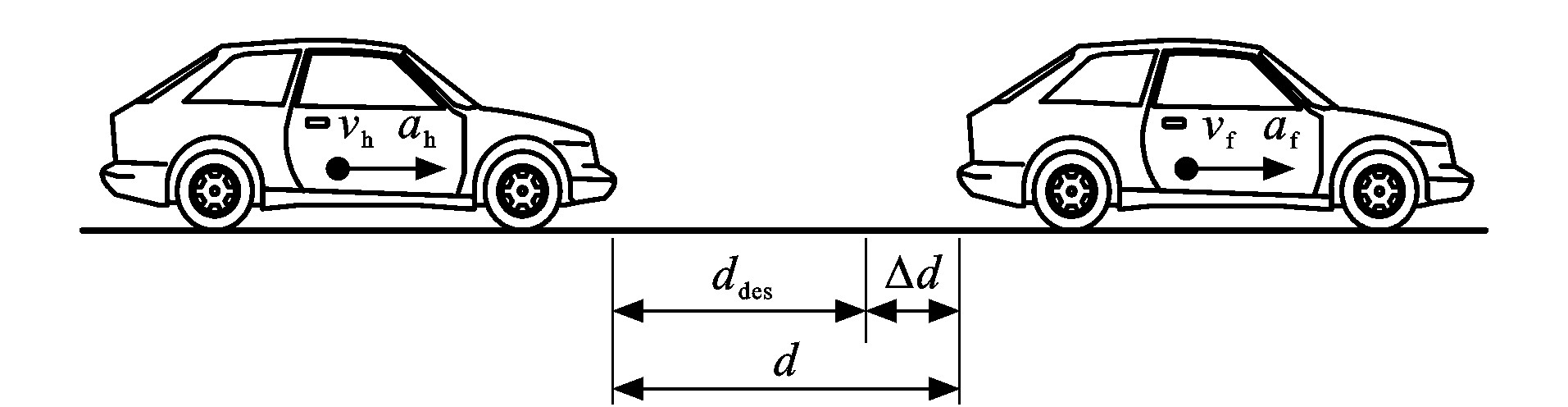
摘要: 为了兼顾车辆自适应巡航控制(ACC)系统的跟踪控制效果和实时性, 提出了基于显式模型预测控制(EMPC)理论的车辆多目标自适应巡航控制方法; 基于车辆间运动学关系建立自适应巡航控制运动学模型, 根据预测控制理论推导预测时域内的跟踪误差预测模型, 并确定车辆安全性、跟踪性、经济性和舒适性等多性能目标函数和约束条件; 运用显式模型预测控制中的多参数规划理论, 将基于反复在线优化计算的闭环模型预测控制系统转化为与之等价的显式多面体分段仿射(PPWA)系统, 通过离线计算获得期望加速度与距离误差、速度误差、自车加速度和前车加速度等状态变量之间的最优控制律, 并设计在线查表的搜索流程, 通过定位当前状态所处分区, 并应用该分区的显式控制律实现自适应巡航控制; 进行了纵向跟踪工况仿真验证, 并与传统MPC-ACC控制方法进行对比。对比结果表明: 在前车正弦加减速工况下, EMPC-ACC控制器单步运算速度比MPC-ACC控制器平均提升了53.51%, EMPC-ACC控制下的平均距离跟踪误差为0.220 3 m, 平均速度误差为0.340 1 m·s-1; 在前车阶跃加减速工况下, EMPC-ACC控制器单步运算速度比MPC-ACC控制器平均提升了72.96%, EMPC-ACC控制下的平均距离跟踪误差为0.331 9 m, 平均速度误差为0.399 1 m·s-1。可见, 提出的EMPC-ACC控制算法在保证纵向跟踪性能的前提下, 有效地提高了自适应巡航控制的实时性。Abstract: In order to coordinate both the tracking control effect and real-time performance of adaptive cruise control(ACC) system, a multi-objective adaptive cruise control method of vehicle was proposed via the explicit model predictive control(EMPC) theory. Based on the kinematic relationship between vehicles, an adaptive cruise control kinematics model was established. The tracking error prediction model was derived in the forecast time domain by the predictive control theory. The multi-performance objective functions and constraints of vehicle safety, tracking, economy and comfort were determined. The closed-loop model predictive control system based on the repeated online optimization calculation, was transformed into an equivalent explicit polyhedral piece-wise affine(PPWA) system by the multi-parameter programming theory of explicit model predictive control. The optimal control laws from the distance error, velocity error, self-vehicle acceleration and rear vehicle acceleration to the desired acceleration were obtained by the off-line calculation. The search process of the online control was designed. The adaptive cruise control was realized by the explicit control laws in the partition of the current state vector. The longitudinal tracking conditions were simulated and verified, and the EMPC-ACC was compared with the traditional MPC-ACC. Compared result shows that in the sinusoidal acceleration and deceleration condition of lead vehicle, the single-step operation speed of EMPC-ACC controller improves by 53.51% on average compared with the MPC-ACC controller. Under the EMPC-ACC, the average distance tracking error is 0.220 3 m, and the average speed error is 0.340 1 m·s-1. In the step acceleration and deceleration condition of lead vehicle, the single-step operation speed of EMPC-ACC controller improves by 72.96% on average compared with the MPC-ACC controller. The average distance tracking error is 0.331 9 m, and the average speed error is 0.399 1 m·s-1 under the EMPC-ACC. It can be seen that on the premise of guaranteeing the longitudinal tracking performance, the proposed EMPC-ACC controller can effectively improve the real-time performance of the ACC.
-
表 1 正弦工况下控制效果对比
Table 1. Comparison of control effects under sinusoidal condition
控制器 距离误差/m 速度误差/(m·s-1) 总耗时/s 平均单步耗时/ms MPC-ACC 0.168 9 0.332 5 1.049 1 1.75 EMPC-ACC 0.220 3 0.340 1 0.681 3 1.14  下载: 导出CSV
下载: 导出CSV
表 2 阶跃工况控制效果对比
Table 2. Comparison of control effects under step condition
控制器 距离误差/m 速度误差/(m·s-1) 总耗时/s 平均单步耗时/ms MPC-ACC 0.221 8 0.387 7 1.264 8 2.11 EMPC-ACC 0.331 9 0.399 1 0.733 8 1.22
下载: 导出CSV
-
[1] 秦严严, 王昊, 王炜, 等. 自适应巡航控制车辆跟驰模型综述[J]. 交通运输工程学报, 2017, 17(3): 121-130. doi: 10.3969/j.issn.1671-1637.2017.03.013QIN Yan-yan, WANG Hao, WANG Wei, et al. Review of car-following models of adaptive cruise control[J]. Journal of Traffic and Transportation Engineering, 2017, 17(3): 121-130. (in Chinese). doi: 10.3969/j.issn.1671-1637.2017.03.013 [2] 吴兵, 王文璇, 李林波, 等. 多前车影响的智能网联车辆纵向控制模型[J]. 交通运输工程学报, 2020, 20(2): 184-194. doi: 10.19818/j.cnki.1671-1637.2020.02.015WU Bing, WANG Wen-xuan, LI Lin-bo, et al. Longitudinal control model for connected autonomous vehicles influenced multiple preceding vehicles[J]. Journal of Traffic and Transportation Engineering, 2020, 20(2): 184-194. (in Chinese). doi: 10.19818/j.cnki.1671-1637.2020.02.015 [3] 吴光强, 张亮修, 刘兆勇, 等. 汽车自适应巡航控制系统研究现状与发展趋势[J]. 同济大学学报(自然科学版), 2017, 45(4): 544-553. https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ201704013.htmWU Guang-qiang, ZHANG Liang-xiu, LIU Zhao-yong, et al. Research status and development trend of vehicle adaptive cruise control systems[J]. Journal of Tongji University(Natural Science), 2017, 45(4): 544-553. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ201704013.htm [4] 刘道旭东. 基于神经网络PID控制器的汽车自适应巡航控制系统研究[D]. 长春: 吉林大学, 2017.LIU Dao-xu-dong. The adaptive cruise control system research based on neural network-PID controller[D]. Changchun: Jilin University, 2017. (in Chinese). [5] ZHANG Jian-long, IOANNOU P A. Longitudinal control of heavy trucks in mixed traffic: environmental and fuel economy considerations[J]. IEEE Transactions on Intelligent Transportation Systems, 2006, 7(1): 92-104. doi: 10.1109/TITS.2006.869597 [6] ABDULLAH R, HUSSAIN A, WARWICK K, et al. Autonomous intelligent cruise control using a novel multiple-controller framework incorporating fuzzy-logic-based switching and tuning[J]. Neurocomputing, 2008, 71(13): 2727-2741. [7] 张亮修, 吴光强, 郭晓晓. 车辆自适应巡航控制系统的建模与分层控制[J]. 汽车工程, 2018, 40(5): 547-553. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201805008.htmZHANG Liang-xiu, WU Guang-qiang, GUO Xiao-xiao. Modeling and hierarchical control of vehicle ACC system[J]. Automotive Engineering, 2018, 40(5): 547-553. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201805008.htm [8] 李朋, 魏民祥, 侯晓利. 自适应巡航控制系统的建模与联合仿真[J]. 汽车工程, 2012, 34(7): 622-626. doi: 10.3969/j.issn.1000-680X.2012.07.013LI Peng, WEI Min-xiang, HOU Xiao-li. Modeling and co-simulation of adaptive cruise control system[J]. Automotive Engineering, 2012, 34(7): 622-626. (in Chinese). doi: 10.3969/j.issn.1000-680X.2012.07.013 [9] GANJI B, KOUZANI A Z, KHOO S T, et al. Adaptive cruise control of a HEV using sliding mode control[J]. Expert Systems with Applications, 2014, 41(2): 607-615. doi: 10.1016/j.eswa.2013.07.085 [10] LI S E, DENG Kun, LI Ke-qiang, et al. Terminal sliding mode control of automated car-following system without reliance on longitudinal acceleration information[J]. Mechatronics, 2015, 30: 327-337. doi: 10.1016/j.mechatronics.2014.09.014 [11] TSAI C C, HSIEH S M, CHEN C T. Fuzzy longitudinal controller design and experimentation for adaptive cruise control and stop & amp; amp; go[J]. Journal of Intelligent and Robotic Systems, 2010, 59(2): 167-189. doi: 10.1007/s10846-010-9393-z [12] LI Sheng-bo, LI Ke-qiang, RAJAMANI R, et al. Model predictive multi-objective vehicular adaptive cruise control[J]. IEEE Transactions on Control Systems Technology, 2011, 19(3): 556-566. doi: 10.1109/TCST.2010.2049203 [13] LUO Li-hua, LIU Hong, LI Ping, et al. Model predictive control for adaptive cruise control with multi-objectives: comfort, fuel-economy, safety and car-following[J]. Journal of Zhejiang University—Science A: Applied Physics and Engineering, 2010, 11(3): 191-201. [14] DING Yong-qiang, CHEN Hui-yan, GONG Jian-wei, et al. Model predictive enhanced adaptive cruise control for multiple driving situations[C]∥IEEE. 2018 Intelligent Vehicle Symposium (IV). New York: IEEE, 2018: 1717-1722. [15] MOSER D, SCHMIED R, WASCHL H, et al. Flexible spacing adaptive cruise control using stochastic model predictive control[J]. IEEE Transactions on Control Systems Technology, 2018, 26(1): 114-127. doi: 10.1109/TCST.2017.2658193 [16] 章军辉, 李庆, 陈大鹏. 车辆多模式多目标自适应巡航控制[J]. 电子科技大学学报, 2018, 47(3): 368-374. doi: 10.3969/j.issn.1001-0548.2018.03.008ZHANG Jun-hui, LI Qing, CHEN Da-peng. Multi-objective adaptive cruise control with multi-mode strategy[J]. Journal of University of Electronic Science and Technology of China, 2018, 47(3): 368-374. (in Chinese). doi: 10.3969/j.issn.1001-0548.2018.03.008 [17] 章军辉, 李庆, 陈大鹏. 仿驾驶员多目标决策自适应巡航鲁棒控制[J]. 控制理论与应用, 2018, 35(5): 769-777. https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201806006.htmZHANG Jun-hui, LI Qing, CHEN Da-peng. Drivers imitated multi-objective adaptive cruise control algorithm[J]. Control Theory and Applications, 2018, 35(5): 769-777. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201806006.htm [18] 解来卿, 罗禹贡, 李升波. 分布式电驱动车辆的ACC协同控制[J]. 汽车工程, 2018, 40(6): 652-658. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201806005.htmXIE Lai-qing, LUO Yu-gong, LI Sheng-bo, et al. Coordinated control for adaptive cruise control system of distributed drive electric vehicles[J]. Automotive Engineering, 2018, 40(6): 652-658. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201806005.htm [19] FALCONE P, BORRELLI F, TSENG H E, et al. Linear time-varying model predictive control and its application to active steering systems: stability analysis and experimental validation[J]. International Journal of Robust and Nonlinear Control, 2011, 18(8): 862-875. [20] MAYNE D Q. Model predictive control: recent developments and future promise[J]. Automatica, 2014, 50(12): 2967-2986. [21] 席裕庚, 李德伟, 林姝. 模型预测控制——现状与挑战[J]. 自动化学报, 2013, 39(3): 222-231. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201303005.htmXI Yu-geng, LI De-wei, LIN Shu. Model predictive control—status and challenges[J]. Acta Automatic Sinica, 2013, 39(3): 222-231. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201303005.htm [22] 李德伟. 预测控制在线优化策略的研究[D]. 上海: 上海交通大学, 2009.LI De-wei. The research on online optimization strategy in model predictive control[D]. Shanghai: Shanghai Jiaotong University, 2009. (in Chinese). [23] DOMAHIDI A, ZGRAGGEN A U, ZEILINGER M N, et al. Efficient interior point methods for multistage problems arising in receding horizon control[C]//IEEE. 51st IEEE Conference on Decision and Control. New York: IEEE, 2012: 668-674. [24] 邱利宏, 钱立军, 杜志远, 等. 车联网环境下车辆最优车速闭环快速模型预测控制[J]. 中国机械工程, 2017, 28(10): 1245-1252. doi: 10.3969/j.issn.1004-132X.2017.10.018QIU Li-hong, QIAN Li-jun, DU Zhi-yuan, et al. A closed-loop FMPC of optimal velocities for connected vehicles[J]. China Mechanical Engineering, 2017, 28(10): 1245-1252. (in Chinese). doi: 10.3969/j.issn.1004-132X.2017.10.018 [25] RUBAGOTTI M, BARCELLI D, BEMPORAD A, et al. Robust explicit model predictive control via regular piecewise-affine approximation[J]. International Journal of Control, 2014, 87(12): 2583-2593. doi: 10.1080/00207179.2014.935958 [26] BEMPORAD A. A multiparametric quadratic programming algorithm with polyhedral computations based on nonnegative least squares[J]. IEEE Transactions on Automatic Control, 2015, 60(11): 2892-2903. doi: 10.1109/TAC.2015.2417851 [27] 朱敏, 陈慧岩. 考虑车间反应时距的汽车自适应巡航控制策略[J]. 机械工程学报, 2017, 53(24): 144-150. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201724018.htmZHU Min, CHEN Hui-yan. Strategy for vehicle adaptive cruise control considering the reaction headway[J]. Journal of Mechanical Engineering, 2017, 53(24): 144-150. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201724018.htm [28] 程鑫滟. 三自由度直升机系统的显式模型预测控制实验研究[D]. 杭州: 浙江工业大学, 2015.CHENG Xin-yan. Control of a laboratory 3-DOF helicopter: explicit model predictive approach[D]. Hangzhou: Zhejiang University of Technology, 2015. (in Chinese). [29] 修晓杰. 显式模型预测控制中点定位算法研究[D]. 杭州: 浙江工业大学, 2019.XIU Xiao-jie. Research on point location algorithm in explicit model predictive control[D]. Hangzhou: Zhejiang University of Technology, 2019. (in Chinese). [30] 赵恺伦. 近似显式模型预测控制及其在三自由度直升机上的应用[D]. 杭州: 浙江工业大学, 2019.ZHAO Kai-lun. Approximate explicit model predictive control and applications on the 3-DOF helicopter[D]. Hangzhou: Zhejiang University of Technology, 2019. (in Chinese). -


 点击查看大图
点击查看大图
图(7) / 表(2)
计量
- 文章访问数: 1167
- HTML全文浏览量: 180
- PDF下载量: 678
- 被引次数: 0
