

Collaborative method of vehicle conflict resolution in merging area for intelligent expressway
-
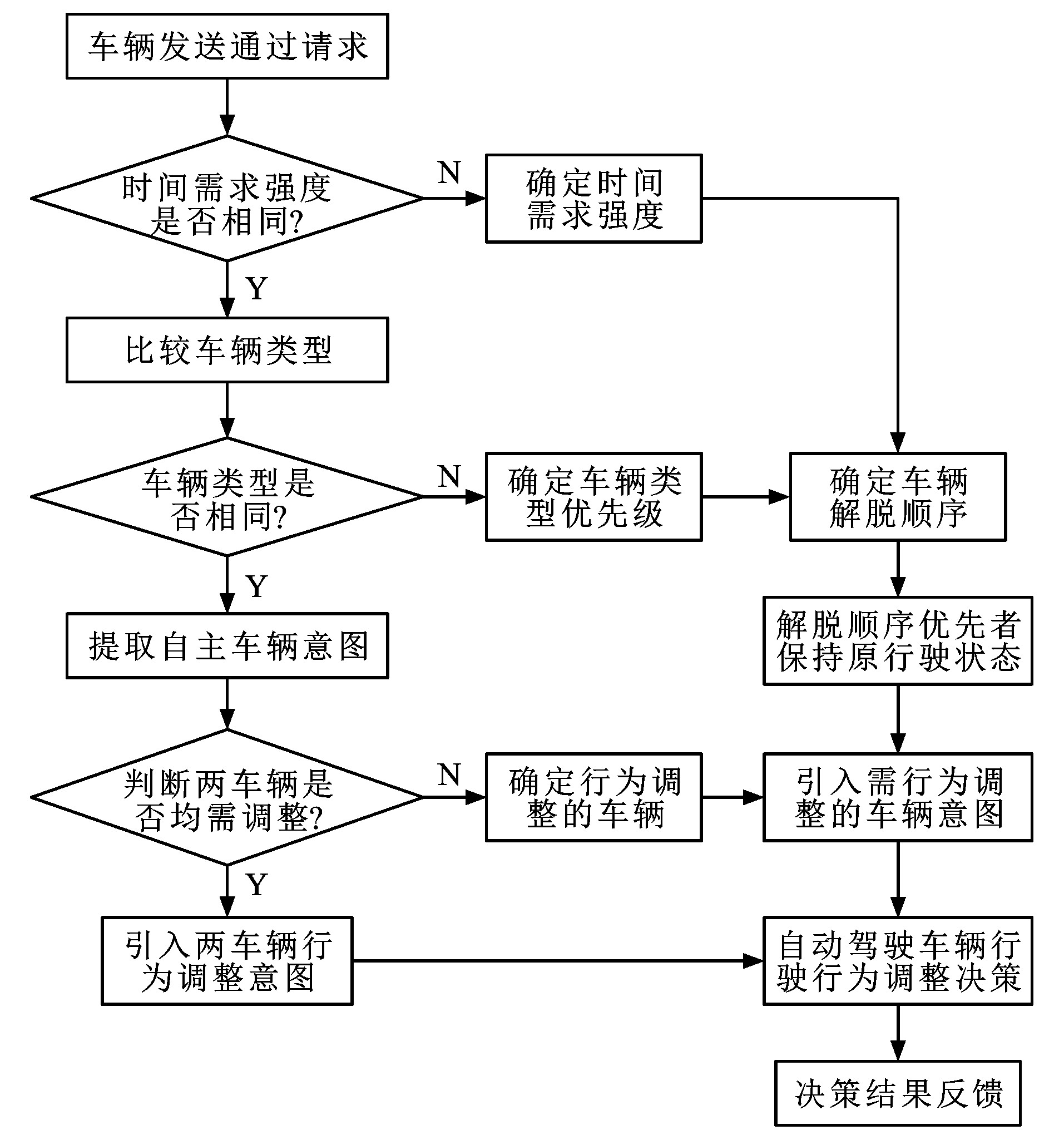
摘要: 根据网联自动驾驶车辆接近合流区的全过程特征, 设定智慧高速合流车辆行驶的协调控制流程; 针对高速公路合流区冲突风险问题, 考虑车辆时间需求强度、车辆类型和行驶意图等因素, 提出了基于合作博弈理论的高速公路合流区网联自动驾驶车辆冲突解脱协调方法; 利用MATLAB软件对不同条件下的车辆通过合流区进行了仿真验证。仿真结果表明: 智慧高速合流区车辆行驶协调规则能够实现网联自动驾驶车辆的通过请求协调, 在合作博弈作用下能够进一步实现冲突系统虚拟支付成本最低的车辆调整决策; 合流区车辆系统虚拟风险程度随着速度的降低而降低; 当严格执行协调决策时, 网联自动驾驶车辆在合流区通过过程中具有更高的稳定性; 当潜在冲突点长度在一定范围内, 两网联自动驾驶车辆行驶速度相同时的合作博弈效果优于车辆行驶速度不同时的合作博弈效果; 利用该协调方法将冲突解脱过程的虚拟支付成本降低了9%~14%, 大大提高了网联自动驾驶车辆合流区通过过程的安全性。Abstract: According to the characteristics of the entire process of connected autonomous vehicles approaching the merging area, the coordination control process of the vehicles driving in the intelligent expressway merging area was set. Aiming at solving the problem of conflict risk in expressway merging area, the factors such as vehicle time demand intensity, vehicle type, and driving intention were considered, and the conflict resolution coordination method of connected autonomous vehicles in expressway merging area was proposed based on cooperative game theory. The vehicle passing merging area under different conditions was simulated and verified by using MATLAB. Simulation result shows that coordination rules of the vehicles driving in the intelligent expressway merging area can realize the coordination of connected autonomous vehicles' passing request. Under the action of cooperative game, the vehicle adjustment decision with the lowest virtual payment cost in the conflict system can be further realized. The degree of vehicle system virtual risk in merging area decreases with the decrease of speed. When the coordination decision is strictly implemented, the connected autonomous vehicles have higher stability in the process of passing merging area. When the length of potential conflict point is within a certain range, the cooperative game effect of two connected autonomous vehicles with the same speed is better than the effect of vehicles with different speeds. The cooperative method reduces the virtual payment cost of the conflict resolution process by 9%-14%, and greatly improves the safety of the process of passing merging area of connected autonomous vehicles.
-

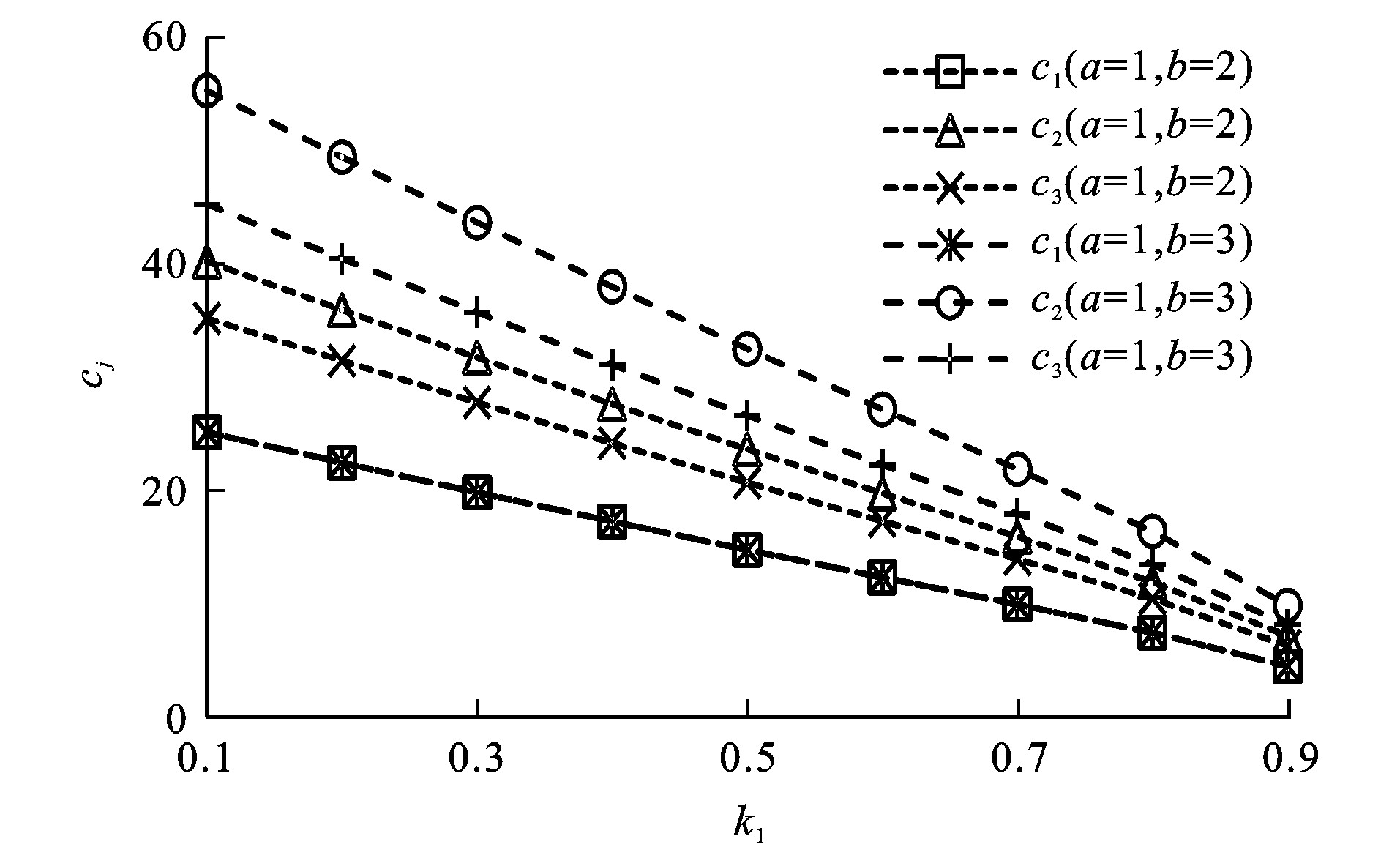
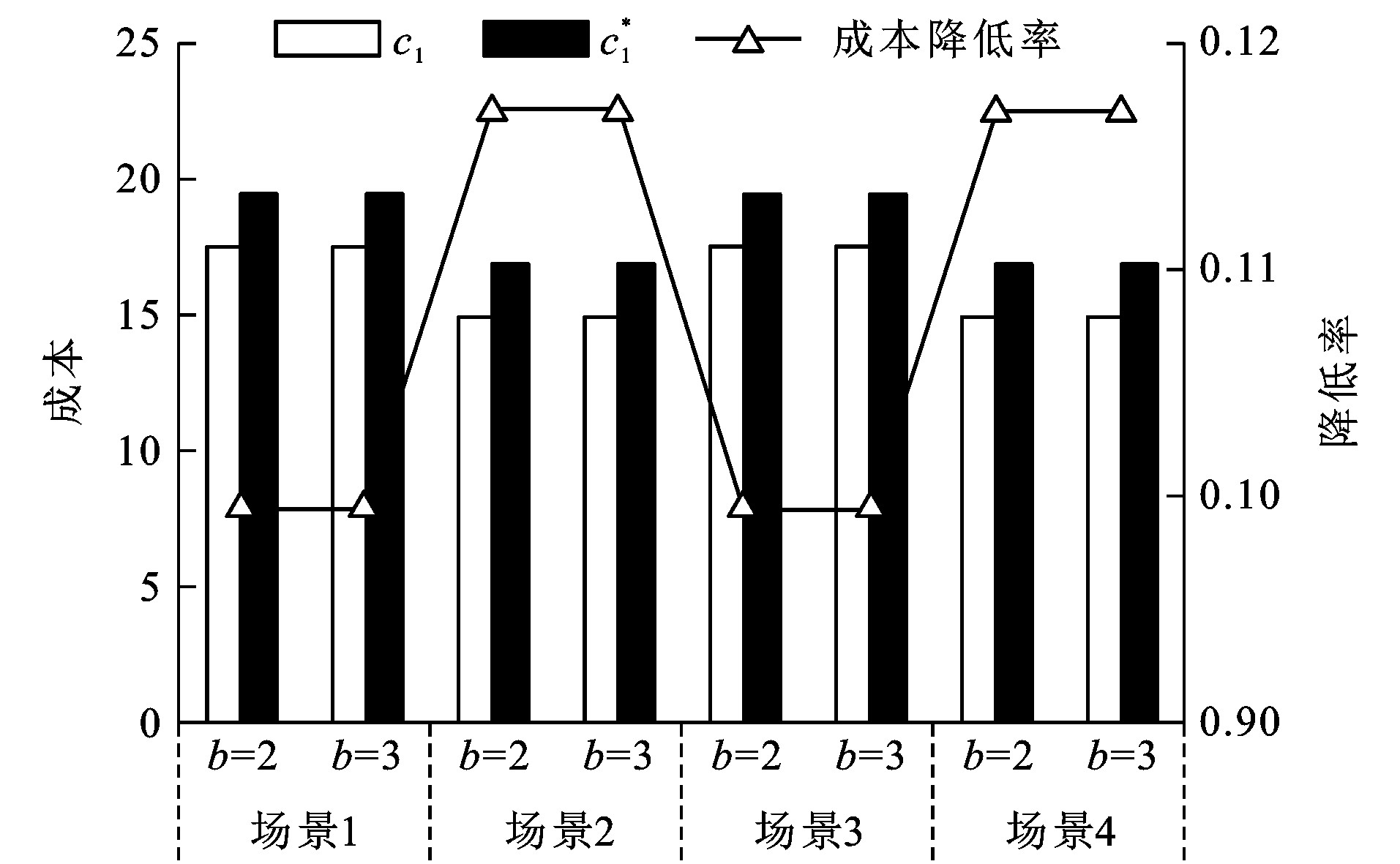
图 4 场景1中不同b下cj随k1变化曲线
Figure 4. Change curves of cj with k1 under different b in scenario 1

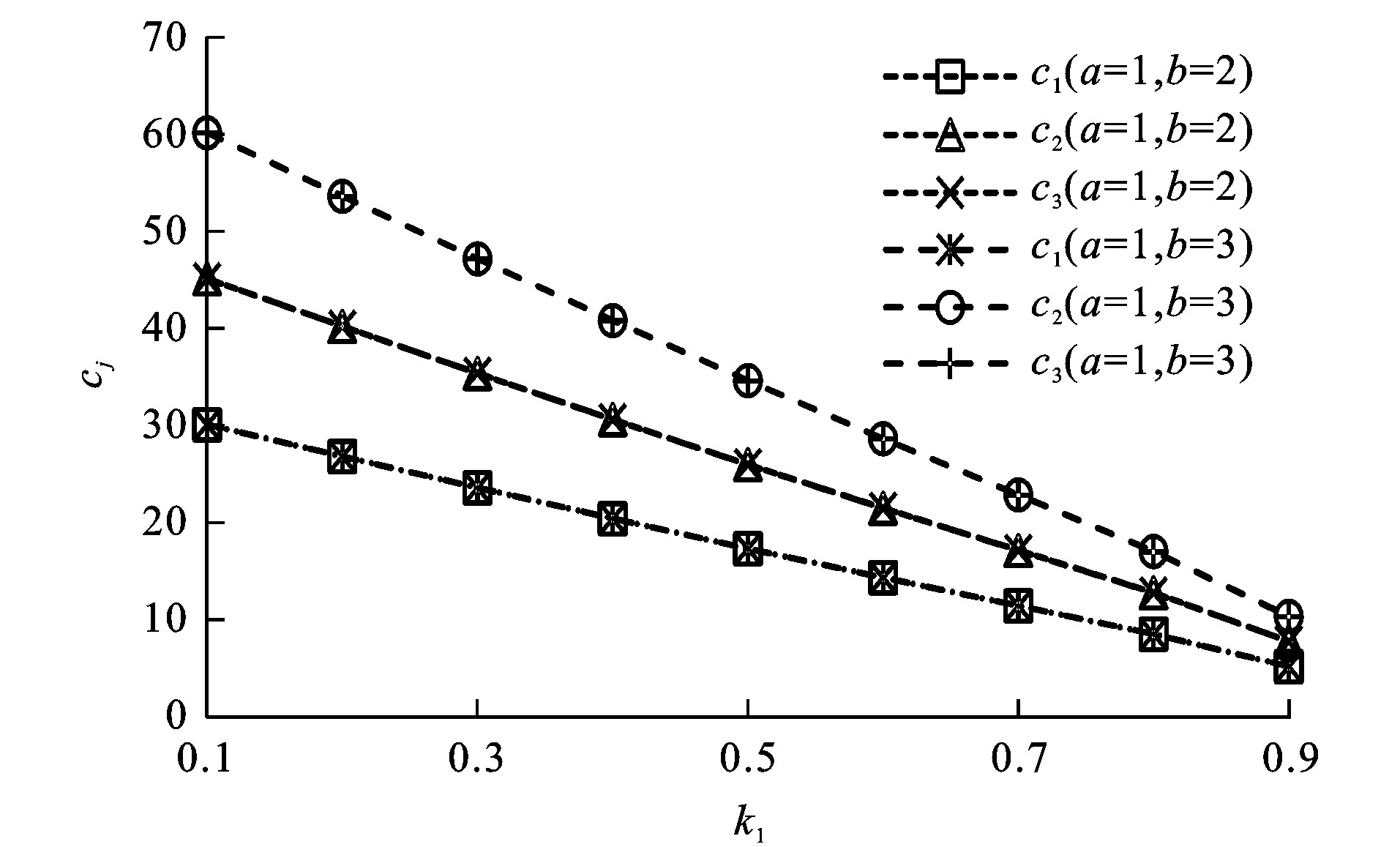
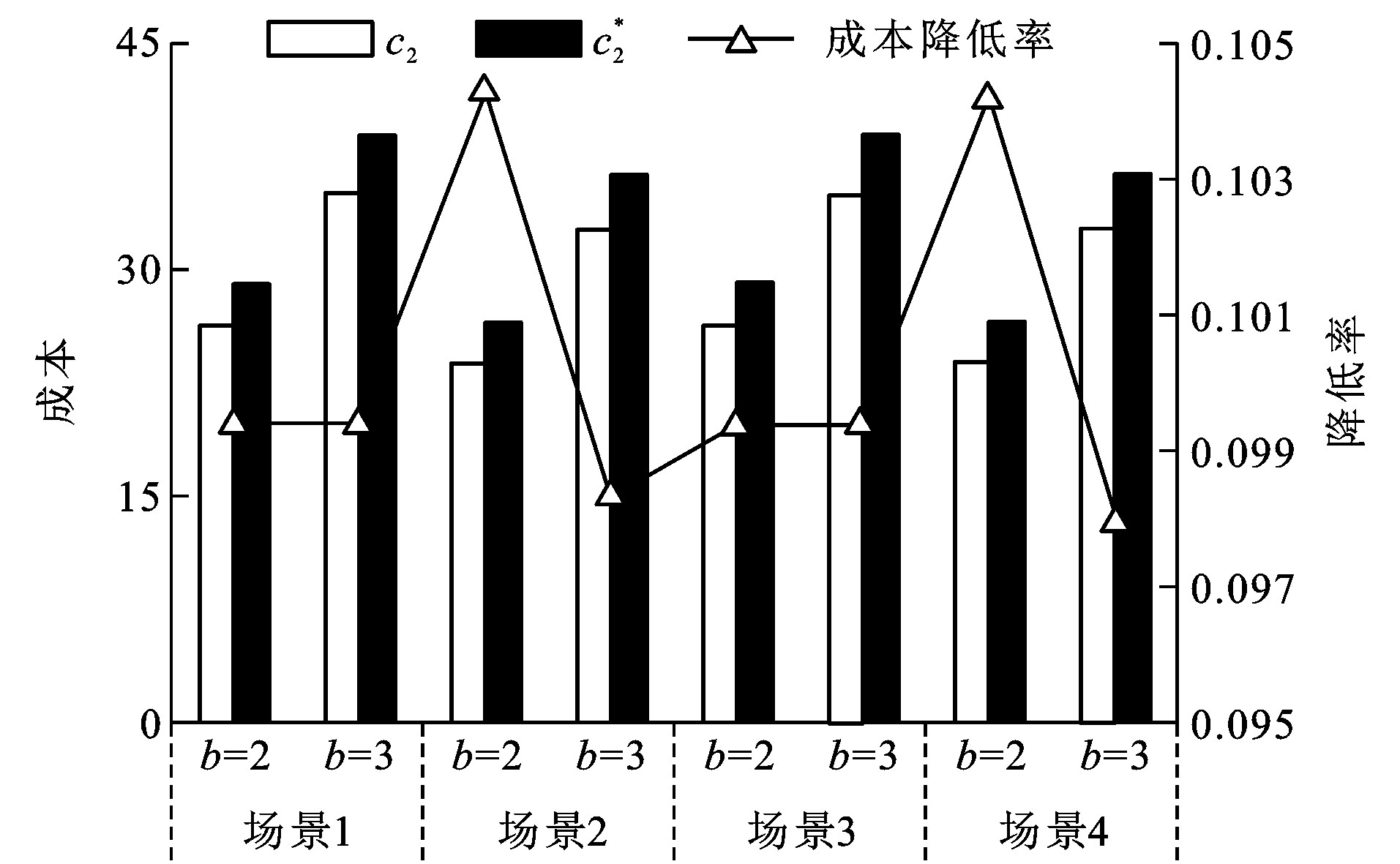
图 5 场景2中不同b下cj随k1变化曲线
Figure 5. Change curves of cj with k1 under different b in scenario 2

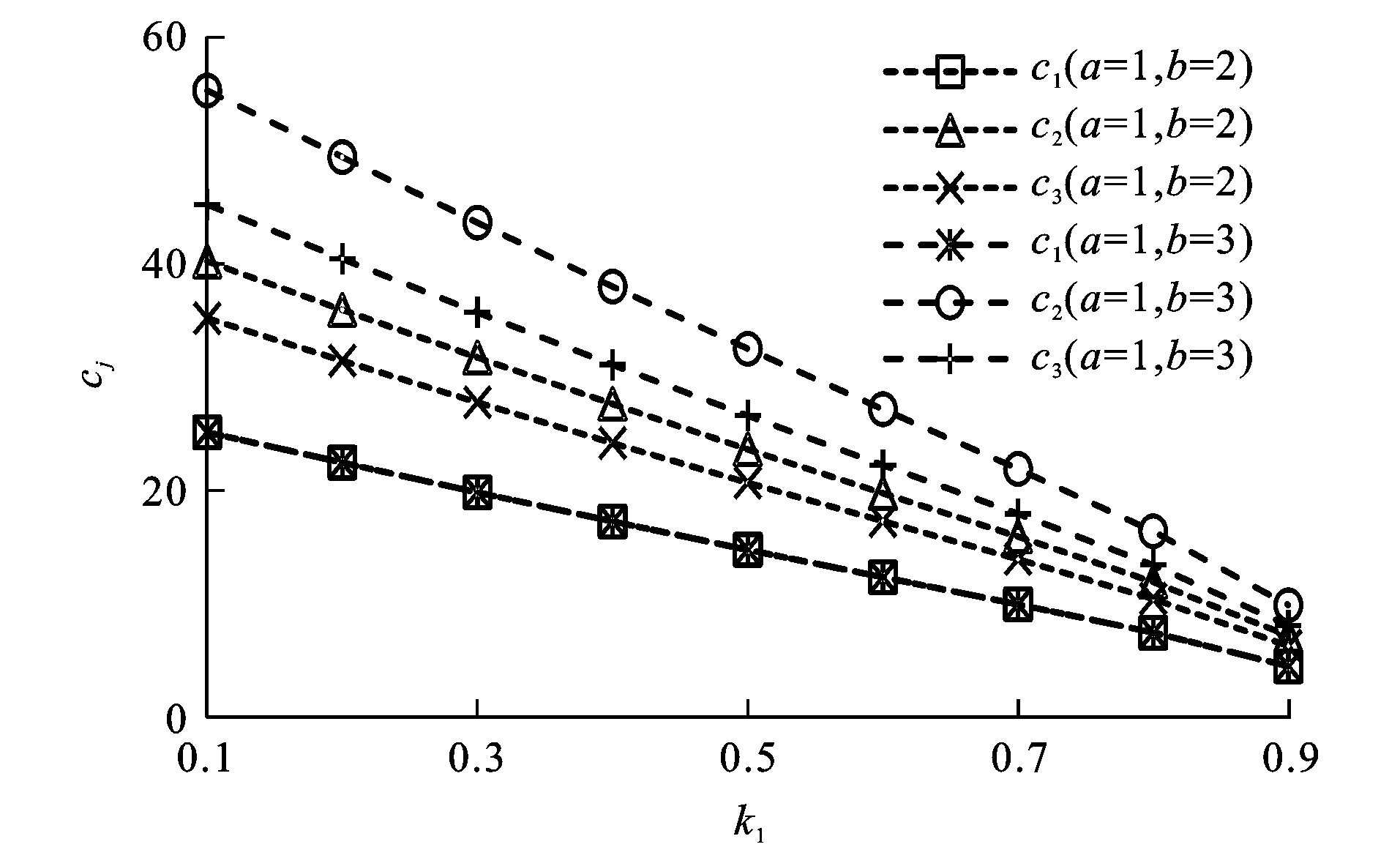
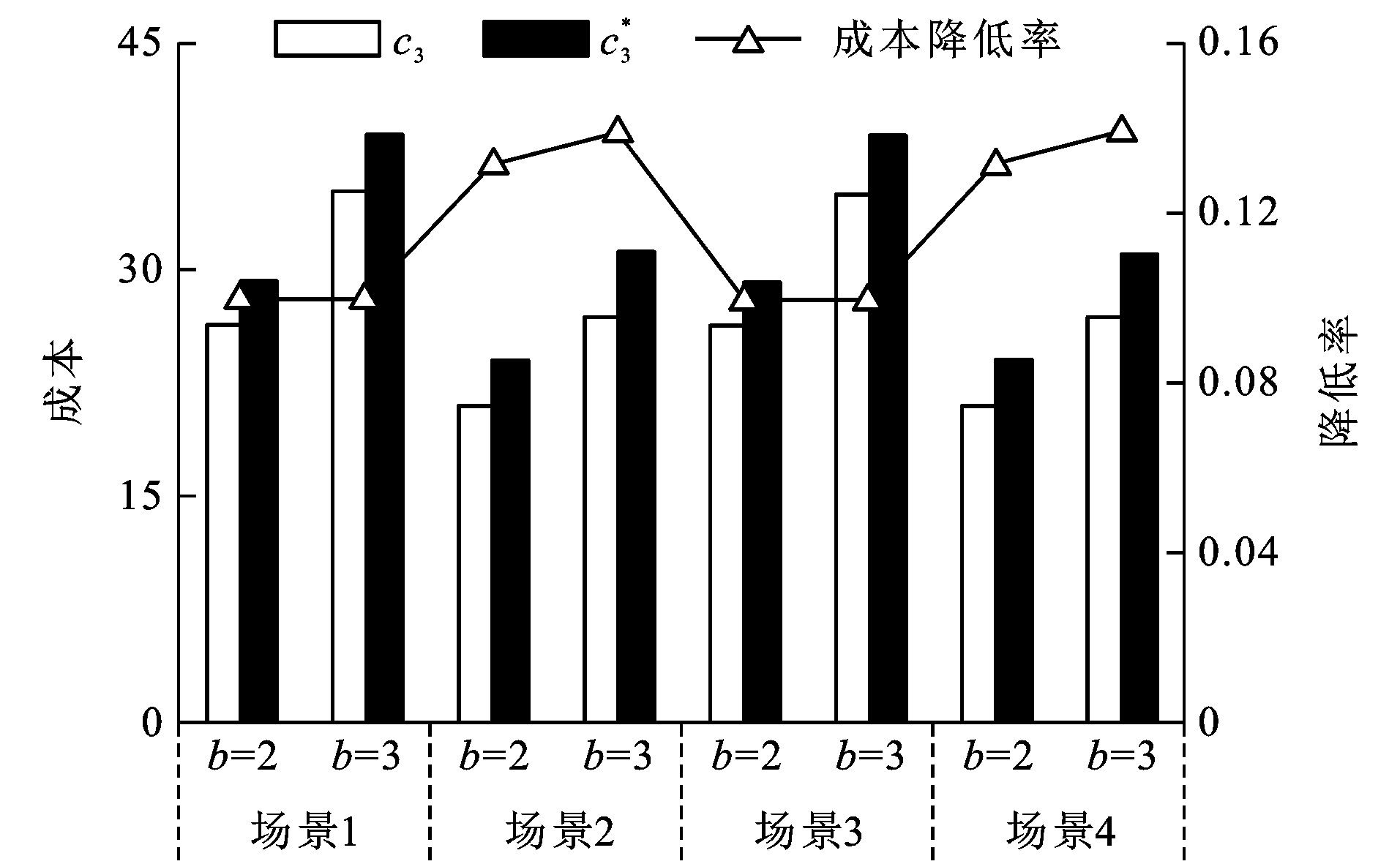
图 6 场景3中不同b下cj随k1变化曲线
Figure 6. Change curves of cj with k1 under different b in scenario 3

图 7 场景4中不同b下cj随k1变化曲线
Figure 7. Change curves of cj with k1 under different b in scenario 4
表 1 决策联盟虚拟支付成本
Table 1. Virtual payment cost of decision alliances
决策联盟 车辆2调整 车辆2不调整 车辆1调整 (x1, x2) (x1, 0) 车辆1不调整 (0, x2) (∞, ∞)  下载: 导出CSV
下载: 导出CSV
表 2 四种场景下的参数
Table 2. Parameters of 4 scenarios
场景 主线车辆位置 Si/m v1/(km·h-1) v2/(km·h-1) l1/m l2/m a b 1 内侧车道 100 60 60 15 15 1 2或3 2 100 60 40 15 15 3 外侧车道 100 60 60 15 20 4 100 60 40 15 20
下载: 导出CSV
-
[1] FERNÁNDEZ-ISABEL A, FUENTES-FERNÁNDEZ R, MARTÍN DE DIEGO I. Modeling multi-agent systems to simulate sensor-based Smart Roads[J]. Simulation Modelling Practice and Theory, 2020, 99: 1-23. [2] SUN Li-jun, ZHAO Hong-duo, TU Hui-zhao, et al. The smart road: practice and concept[J]. Engineering, 2018, 4(4): 436-437. doi: 10.1016/j.eng.2018.07.014 [3] RAO B S Y, VARAIYA P. Roadside intelligence for flow control in an intelligent vehicle and highway system[J]. Transportation Research Part C: Emerging Technologies, 1994, 2(1): 49-72. doi: 10.1016/0968-090X(94)90019-1 [4] ELLIOTT D, KEEN W, MIAO Lei. Recent advances in connected and automated vehicles[J]. Journal of Traffic and Transportation Engineering (English Edition), 2019, 6(2): 109-131. doi: 10.1016/j.jtte.2018.09.005 [5] HEDRICK J K. Vehicle control issues in intelligent vehicle highway systems[J]. IFAC Proceedings Volumes, 1995, 28(1): 195-202. doi: 10.1016/S1474-6670(17)45694-1 [6] FINOGEEV A, FINOGEEV A, FIONOVA L, et al. Intelligent monitoring system for smart road environment[J]. Journal of Industrial Information Integration, 2019, 15: 15-20. doi: 10.1016/j.jii.2019.05.003 [7] MAHMASSANI H S. 50th anniversary invited article—autonomous vehicles and connected vehicle systems: flow and operations considerations[J]. Transportation Science, 2016, 50(4): 1140-1162. doi: 10.1287/trsc.2016.0712 [8] NOWAKOWSKI C, O'CONNELL J, SHLADOVER S E, et al. Cooperative adaptive cruise control: driver acceptance of following gap settings less than one second[C]∥Human Factors and Ergonomics Society. 54th Human Factors and Ergonomics Society Annual Meeting. Richmond: Human Factors and Ergonomics Society Inc., 2010: 2033-2037. [9] CHEN Dan-jue, AHN S, CHITTURI M, et al. Towards vehicle automation: roadway capacity formulation for traffic mixed with regular and automated vehicles[J]. Transportation Research Part B: Methodological, 2017, 100: 196-221. doi: 10.1016/j.trb.2017.01.017 [10] XIE Yuan-chang, ZHANG Hui-xing, GARTNER N H, et al. Collaborative merging strategy for freeway ramp operations in a connected and autonomous vehicles environment[J]. Journal of Intelligent Transportation Systems: Technology, Planning, and Operations, 2017, 21(2): 136-147. doi: 10.1080/15472450.2016.1248288 [11] TALEBPOUR A, MAHMASSANI H S. Influence of connected and autonomous vehicles on traffic flow stability and throughput[J]. Transportation Research Part C: Emerging Technologies, 2016, 71: 143-163. doi: 10.1016/j.trc.2016.07.007 [12] ZHONG Zi-jia, LEE J Y. The effectiveness of managed lane strategies for the near-term deployment of cooperative adaptive cruise control[J]. Transportation Research Part A: Policy and Practice, 2019, 129: 257-270. doi: 10.1016/j.tra.2019.08.015 [13] YE Lan-hang, YAMAMOTO T. Modeling connected and autonomous vehicles in heterogeneous traffic flow[J]. Physica A: Statistical Mechanics and its Applications, 2018, 490: 269-277. doi: 10.1016/j.physa.2017.08.015 [14] WEI Jun-qing, DOLAN J M, LITKOUHI B. Autonomous vehicle social behavior for highway entrance ramp management[C]//IEEE. 2013 IEEE Intelligent Vehicles Symposium. New York: IEEE, 2013: 201-207. [15] RIOS-TORRES J, MALIKOPOULOS A A. Automated and cooperative vehicle merging at highway on-ramps[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 18(4): 780-789. [16] QIAN Xiang-jun, GREGOIRE J, DE LA FORTELLE A, et al. Decentralized model predictive control for smooth coordination of automated vehicles at intersection[C]∥IEEE. 2015 European Control Conference. New York: IEEE, 2015: 3452-3458. [17] WANG Yun-peng, E Wen-juan, TANG Wen-zhong, et al. Automated on-ramp merging control algorithm based on internet-connected vehicles[J]. IET Intelligent Transport Systems, 2013, 7(4): 371-379. doi: 10.1049/iet-its.2011.0228 [18] LETTER C, ELEFTERIADOU L. Efficient control of fully automated connected vehicles at freeway merge segments[J]. Transportation Research Part C: Emerging Technologies, 2017, 80: 190-205. doi: 10.1016/j.trc.2017.04.015 [19] NIE Jian-qiang, ZHANG Jian, DING Wan-ting. Decentralized cooperative lane-changing decision-making for connected autonomous vehicles[J]. IEEE Access, 2016, 4: 9413-9420. doi: 10.1109/ACCESS.2017.2649567 [20] WANG Meng, HOOGENDOORN S P, DAAMEN W, et al. Game theoretic approach for predictive lane-changing and car-following control[J]. Transportation Research Part C: Emerging Technologies, 2015, 58: 73-92. doi: 10.1016/j.trc.2015.07.009 [21] ENGLUND C, CHEN Lei, PLOEG J, et al. The grand cooperative driving challenge 2016: boosting the introduction of cooperative automated vehicles[J]. IEEE Wireless Communications, 2016, 23(4): 146-152. doi: 10.1109/MWC.2016.7553038 [22] WANG Chong, ZHANG Jian, XU Ling-hui, et al. A new solution for freeway congestion: cooperative speed limit control using distributed reinforcement learning[J]. IEEE Access, 2019, 7: 41947-41957. doi: 10.1109/ACCESS.2019.2904619 [23] LI Ye, LI Zhi-bin, WANG Hao. Evaluating the safety impact of adaptive cruise control in traffic oscillations on freeways[J]. Accident Analysis and Prevention, 2017, 104: 137-145. doi: 10.1016/j.aap.2017.04.025 [24] LI Zhi-bin, LI Ye, LIU Pan, et al. Development of a variable speed limit strategy to reduce secondary collision risks during inclement weathers[J]. Accident Analysis and Prevention, 2014, 72: 134-145. doi: 10.1016/j.aap.2014.06.018 [25] QUINTAS L G, MARCHI E. Equilibrium special in n-person games[J]. Journal of Optimization Theory and Applications, 1990, 67(1): 193-204. doi: 10.1007/BF00939744 [26] NASH J F. Non-cooperative games[J]. Annals of Mathematics, 1951: 286-295. [27] SHAPLEY L S. A value for n-person games[J]. Contributions to the Theory of Games, 1953, 2(28): 307-317. [28] LI Yong-jun, LIN Lin, DAI Qian-zhi, et al. Allocating common costs of multinational companies based on arm's length principle and Nash non-cooperative game[J]. European Journal of Operational Research, 2020, 283(3): 1002-1010. [29] MOHAMMAD R, MOKHTAR B, ALI M R, et al. Balancing management of strategic aggregators using non-cooperative game theory[J]. Electric Power Systems Research, 2020, 184: 1-12. [30] HOU Qin-zhong, TARKO A P, MENG Xiang-hai, et al. Investigating factors of crash frequency with random effects and random parameters models: new insights from Chinese freeway study[J]. Accident Analysis and Prevention, 2018, 120: 1-12. -



 点击查看大图
点击查看大图

计量
- 文章访问数: 1093
- HTML全文浏览量: 164
- PDF下载量: 674
- 被引次数: 0
