

-
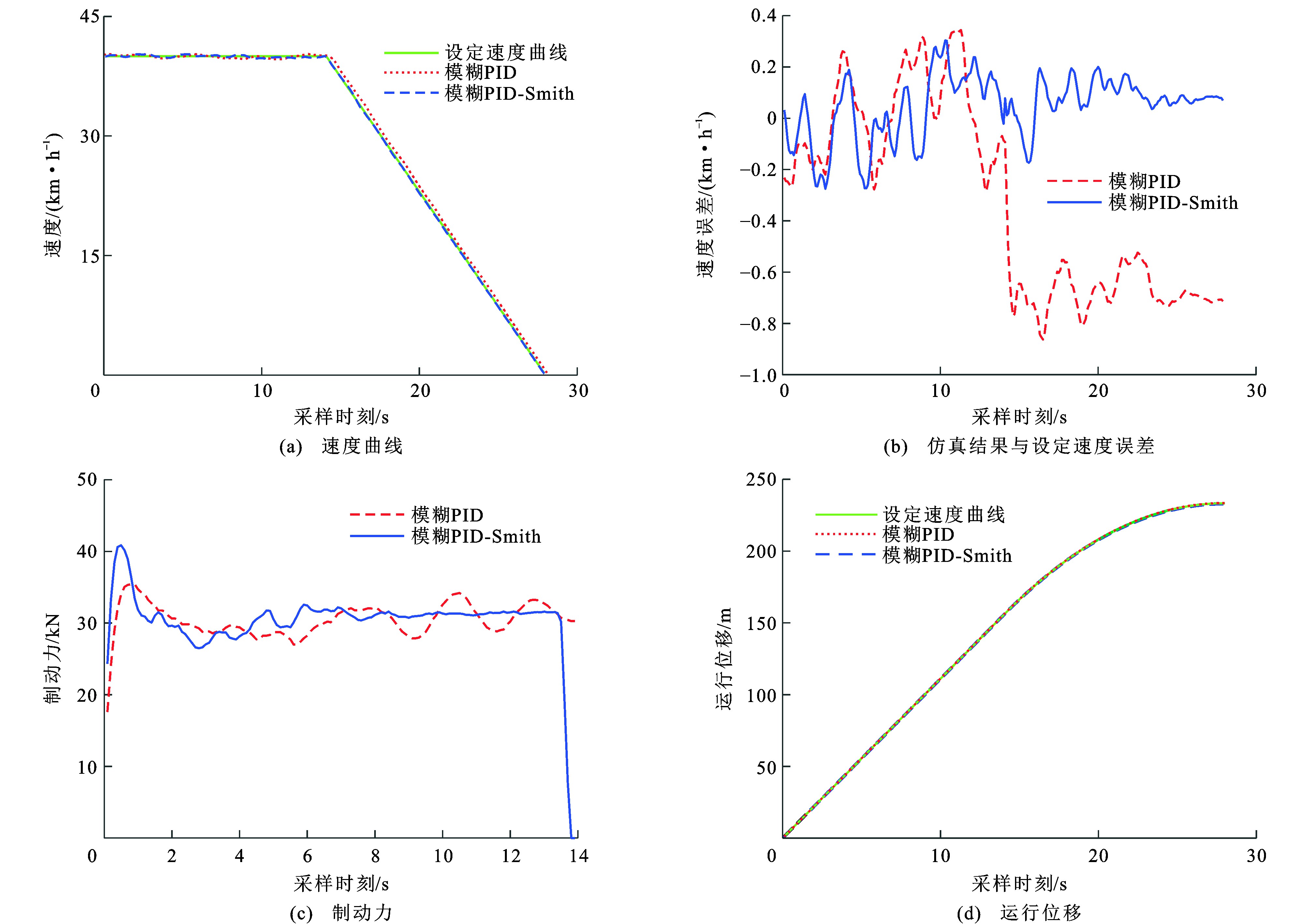
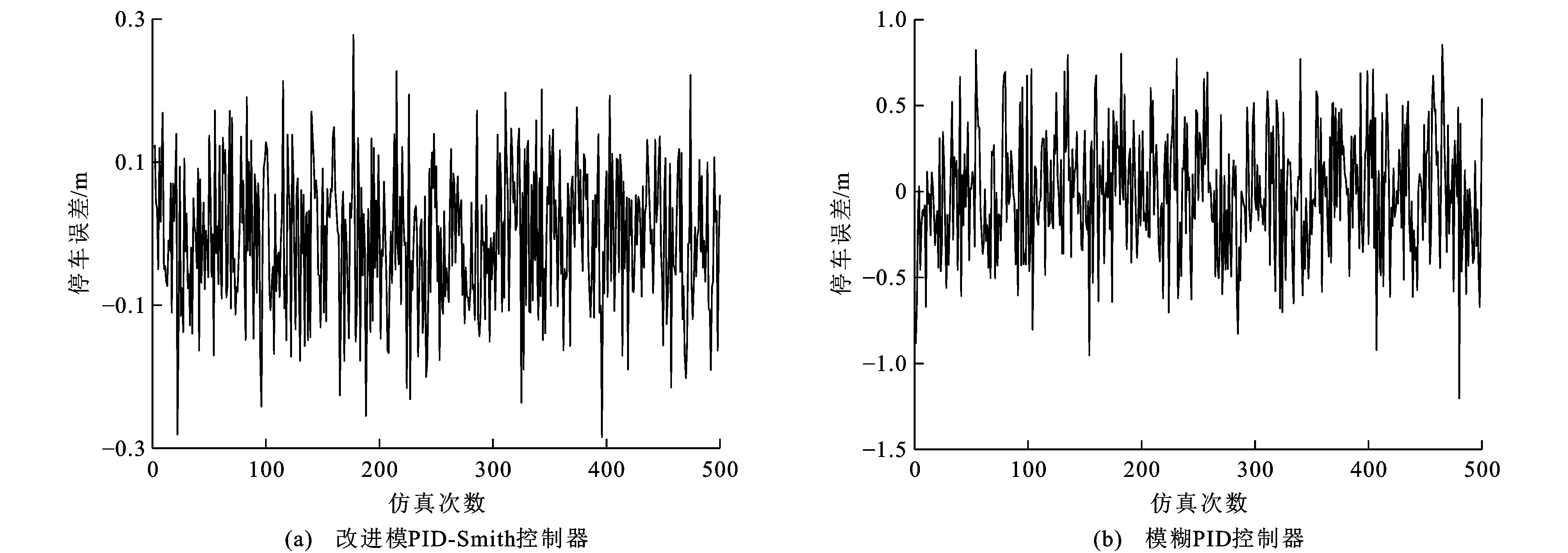
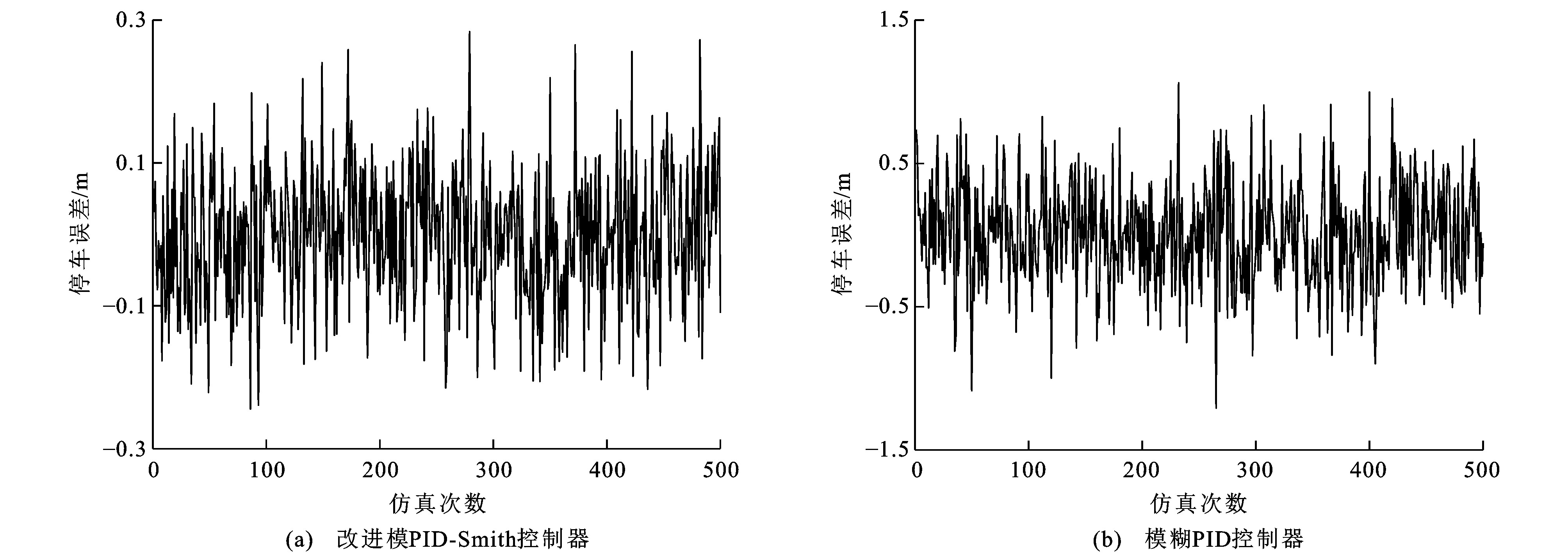
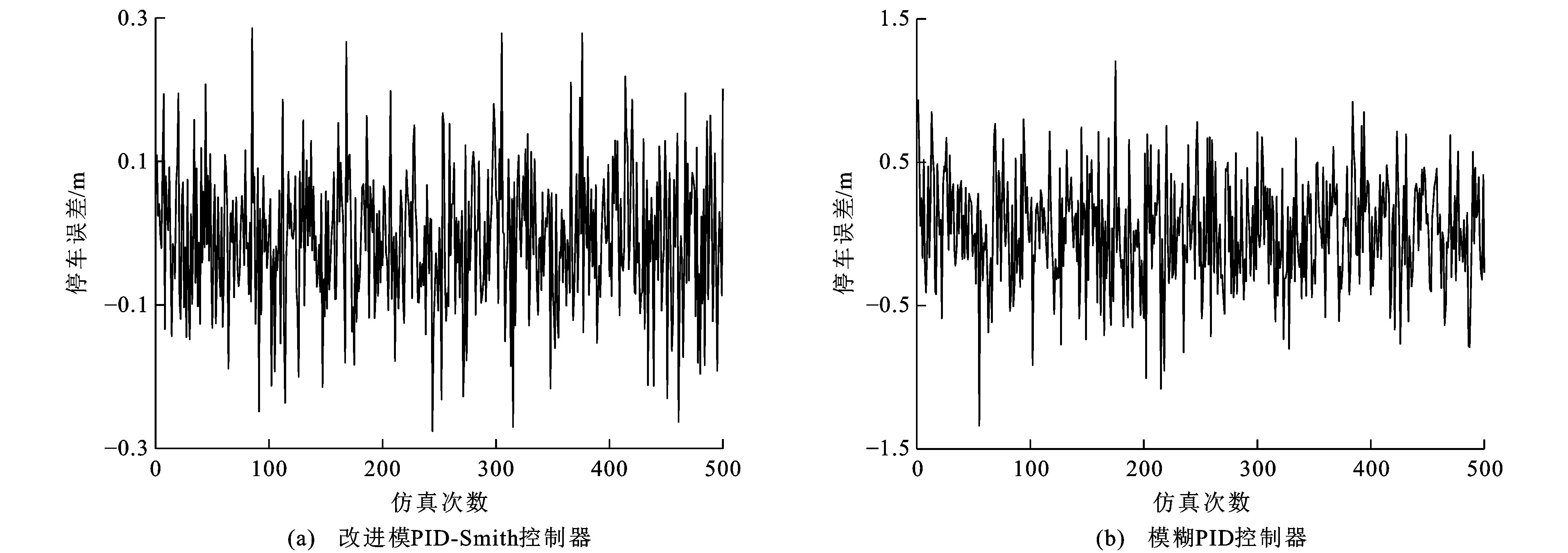
摘要: 为解决动车组制动过程中电制动与空气制动切换时控制模型参数变化和空气制动延时大的问题, 以提高动车组停车的精确性, 提出了一种改进模糊PID-Smith控制器; 通过分析动车组制动过程中单个车厢的力学模型, 考虑列车制动过程的特点, 建立了关于运行速度和制动力的二阶纯延时传递函数; 将离散化的二阶纯延时传递函数与单个车厢的力学模型结合, 建立了动车组多质点控制模型, 并分析了该控制模型的特点; 提出了一种改进的模糊PID-Smith控制器, 通过引入Smith预估控制器解决了动车组制动过程中空气制动系统延时大的问题, 使用递推最小二乘法在线辨识了模型参数, 以解决动车组制动过程中电制动切换到空气制动时的模型参数变化问题; 采用模糊PID控制器代替Smith预估控制器中的PID部分, 解决了PID参数整定难和鲁棒性差的问题; 采用MATLAB软件对CRH380A型高速动车组进行仿真, 在不同进站速度、不同减速度和不同程度干扰下, 使控制器控制动车组跟踪设定速度, 并与模糊PID控制器的结果进行对比。仿真结果表明: 改进模糊PID-Smith控制器得到的动力单元速度与其设定速度的误差在0.4 km·h-1以内, 而模糊PID控制器的误差在1.0 km·h-1以内; 采用提出控制器得到的停车误差在0.3 m以内, 而模糊PID控制器的停车误差在1.5 m以内; 提出的控制器满足高速动车组运行过程中停车误差小于0.3 m的要求。
-
关键词:
- 动车组 /
- 制动 /
- 多质点 /
- 模糊PID /
- Smith预估控制器
Abstract: To solve the problems of control model parameter change when the electric brake and air brake were switched in the EMU braking process and the large delay of air brake system, and improve the parking accuracy of EMU, an improved fuzzy PID-Smith controller was proposed. A second-order pure delay transfer function with respect to the running speed and braking force was established by analyzing the mechanical model of a single carriage in the braking process of EMU and considering the characteristics of braking process of trains. The discretized second-order pure delay transfer function was combined with the mechanical model of a single carriage to establish the multi-particle control model of EMU, and the characteristics of this control model were analyzed. An improved fuzzy PID-Smith controller was proposed. The Smith predicting controller was introduced to solve the large delay problem of air brake system during the braking process of EMU. The recursive least square method was used to identify the model parameters online to solve the problem of model parameter change when the electric brake switching to the air brake during the braking process of EMU. The fuzzy PID controller was used to replace the PID part of Smith predicting controller to solve the problems of PID parameter tuning difficulty and poor robustness. The software MATLAB was used to simulate the CRH380 A high-speed EMU. The controller was used to control the EMU to track the set speed under the conditions of different inbound speeds, different decelerations and different degrees of interferences, and the results were compared with those of fuzzy PID controller. Simulation result shows that the errors between the power unit speed and the set speed obtained by the improved fuzzy PID-Smith controller and fuzzy PID controller are within 0.4 and 1.0 km·h-1, respectively. The parking error obtained by the proposed controller and fuzzy PID controller are within 0.3 and 1.5 m, respectively. Therefore, the proposed controller satisfies the requirement that the parking error during the operation of high-speed EMU should be less than 0.3 m.-
Key words:
- EMU /
- braking /
- multi-particle /
- fuzzy PID /
- Smith predicting controller
-

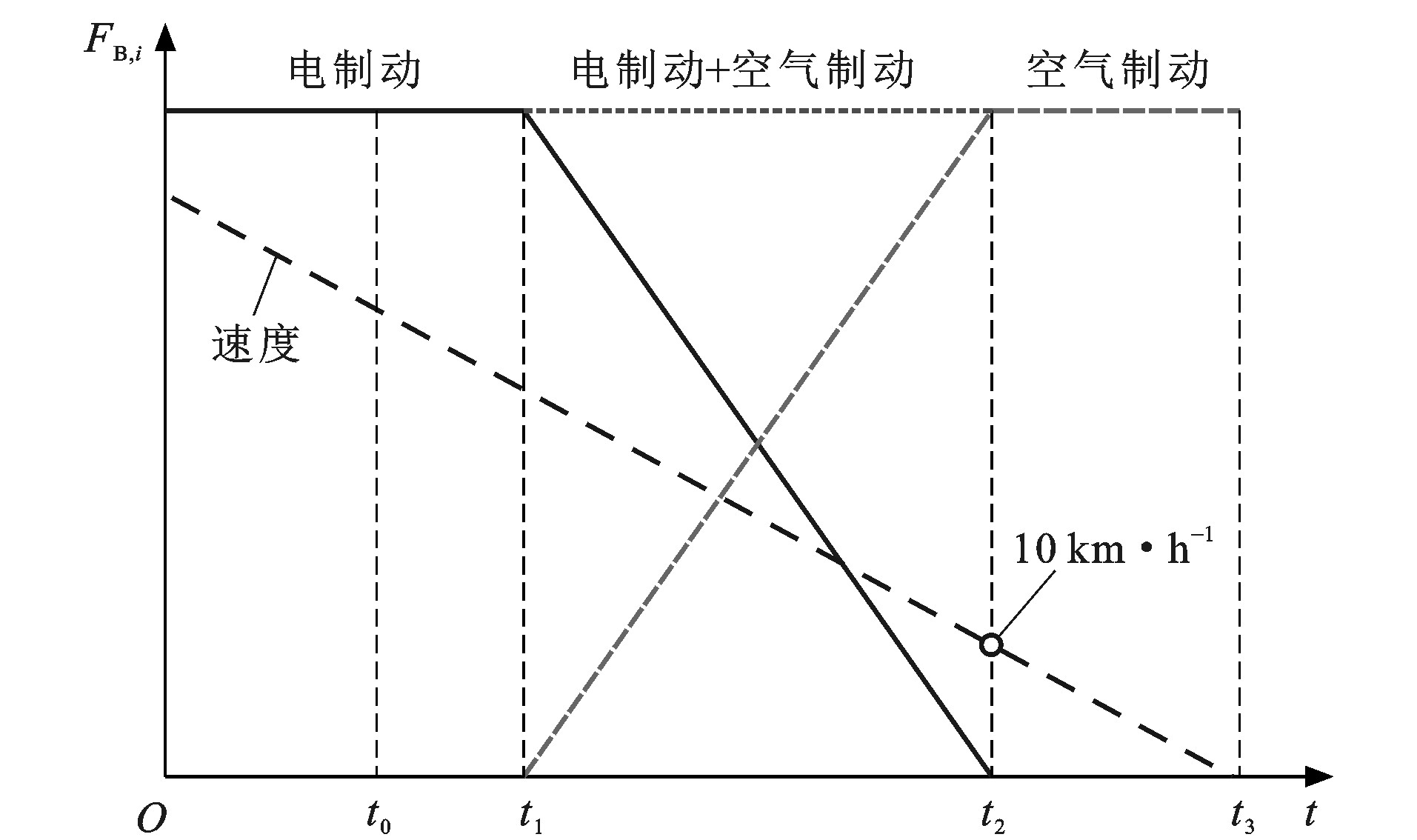
图 2 停车时电制动力和空气制动力的变化过程
Figure 2. Change processes of electric brake and air brake forces during parking

图 6 改进模糊PID-Smith控制器和模糊PID控制器的仿真结果对比
Figure 6. Comparison of simulation results between improved fuzzy PID-Smith controller and fuzzy PID controller

图 7 进站速度为40 km·h-1时改进模糊PID-Smith控制器和模糊PID控制器的停车误差曲线
Figure 7. Parking error curves of improved fuzzy PID-Smith controller and fuzzy PID controller when inbound speed is 40 km·h-1

图 8 进站速度为33 km·h-1时改进模糊PID-Smith控制器和模糊PID控制器的停车误差曲线
Figure 8. Parking error curves of improved fuzzy PID-Smith controller and fuzzy PID controller when inbound speed is 33 km·h-1
-
[1] 上官伟, 蔡伯根, 王晶晶, 等. 时速250 km以上高速列车制动模式曲线算法[J]. 交通运输工程学报, 2011, 11(3): 41-46, 54. doi: 10.3969/j.issn.1671-1637.2011.03.008SHANG Guan-wei, CAI Bai-gen, WANG Jing-jing, et al. Braking mode curve arithmetic of high-speed train above 250 km·h-1[J]. Journal of Traffic and Transportation Engineering, 2011, 11(3): 41-46, 54. (in Chinese). doi: 10.3969/j.issn.1671-1637.2011.03.008 [2] CHEN Xuan-na, MA Wei-gang, XIE Guo. A survey of control algorithm for automatic train operation[C]//IEEE. 14th IEEE Conference on Industrial Electronics and Applications. New York: IEEE, 2003: 2405-2410. [3] 罗仁士, 王义惠, 于振宇, 等. 城轨列车自适应精确停车控制算法研究[J]. 铁道学报, 2012, 34(4): 64-68. doi: 10.3969/j.issn.1001-8360.2012.04.011LUO Ren-shi, WANG Yi-hui, YU Zhen-yu, et al. Adaptive stopping control of urban rail vehicle[J]. Journal of the China Railway Society, 2012, 34(4): 64-68. (in Chinese). doi: 10.3969/j.issn.1001-8360.2012.04.011 [4] 李中奇, 杨辉, 刘杰民. 高速动车组自适应速度跟踪控制[J]. 铁道学报, 2015, 37(4): 61-68. doi: 10.3969/j.issn.1001-8360.2015.04.12LI Zhong-qi, YANG Hui, LIU Jie-min. Adaptive speed tracking control of high-speed electric multiple unit[J]. Journal of the China Railway Society, 2015, 37(4): 61-68. (in Chinese). doi: 10.3969/j.issn.1001-8360.2015.04.12 [5] 石卫师. 基于无模型自适应控制的城轨列车自动驾驶研究[J]. 铁道学报, 2016, 38(3): 72-77. doi: 10.3969/j.issn.1001-8360.2016.03.010SHI Wei-shi. Research on automatic train operation based on model-free adaptive control[J]. Journal of the China Railway Society, 2016, 38(3): 72-77. (in Chinese). doi: 10.3969/j.issn.1001-8360.2016.03.010 [6] 何之煜, 杨志杰, 吕旌阳. 基于自适应模糊滑模的列车精确停车制动控制算法[J]. 中国铁道科学, 2019, 40(2): 122-129. doi: 10.3969/j.issn.1001-4632.2019.02.16HE Zhi-yu, YANG Zhi-jie, LYU Jing-yang. Braking control algorithm for accurate train stopping based on adaptive fuzzy sliding mode[J]. China Railway Science, 2019, 40(2): 122-129. (in Chinese). doi: 10.3969/j.issn.1001-4632.2019.02.16 [7] 张梦楠, 徐洪泽, 张严心. 基于自适应模糊滑模控制的高速列车自动停车算法[J]. 信息与控制, 2015, 44(2): 223-229. https://www.cnki.com.cn/Article/CJFDTOTAL-XXYK201502017.htmZHANG Meng-nan, XU Hong-ze, ZHANG Yan-xin. Automatic stop method for high speed train based on adaptive fuzzy sliding mode control[J]. Information and Control, 2015, 44(2): 223-229. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XXYK201502017.htm [8] 银铭. 智能算法在无人驾驶城轨列车牵引控制中的应用研究[D]. 兰州: 兰州交通大学, 2017.YIN Ming. Application of intelligent algorithm in traction control of unmanned urban rail transit[D]. Lanzhou: Lanzhou Jiaotong University, 2017. (in Chinese). [9] 吴鹏. 城轨列车精确停车算法研究[D]. 成都: 西南交通大学, 2015.WU Peng. The automatic stop control algorithm for urban rail trains[D]. Chengdu: Southwest Jiaotong University, 2015. (in Chinese). [10] YASUNOBU S, MIYAMOTO S, IHARA H. A fuzzy control for train automatic stop control[J]. Transactions of the Society of Instrument and Control Engineers, 1983, 19(11): 873-880. doi: 10.9746/sicetr1965.19.873 [11] LI Wei, XIAN Kai, YIN Jia-teng, et al. Developing train station parking algorithms: new frameworks based on fuzzy reinforcement learning[J]. Journal of Advanced Transportation, 2019, 2019: 1-9. [12] YASUNOBU S, MURAI Y. Predictive fuzzy control and parking control[C]//IEEE. Proceedings of 1995 American Control Conference. New York: IEEE, 1995: 2277-2281. [13] OSHIMA H, YASUNOBU S, SEKINO S I. Automatic train operation system based on predictive fuzzy control[C]//IEEE. Proceedings of the International Workshop on Artificial Intelligence for Industrial Applications. New York: IEEE, 1988: 485-489. [14] 郭红戈, 孙志毅, 张春美. 动车组列车制动系统Hammerstein模型的广义预测控制研究[J]. 铁道学报, 2014, 36(6): 47-54. https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB201406010.htmGUO Hong-ge, SUN Zhi-yi, ZHANG Chun-mei. Generalized predictive control over hammerstein model of EMU braking system[J]. Journal of the China Railway Society, 2014, 36(6): 47-54. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB201406010.htm [15] WU Peng, WANG Qing-yuan. Research of the automatic train stop control based on adaptive generalized predictive control[C]//IEEE. Proceedings of the 33rd Chinese Control Conference. New York: IEEE, 2014: 3399-3404. [16] 陈荣武, 刘莉, 郭进. 基于遗传算法的列车运行能耗优化算法[J]. 交通运输工程学报, 2012, 12(1): 112-118. http://transport.chd.edu.cn/article/id/201201017CHEN Rong-wu, LIU Li, GUO Jin. Optimization algorithm for train operation energy consumption based on genetic algorithm[J]. Journal of Traffic and Transportation Engineering, 2012, 12(1): 112-118. (in Chinese). http://transport.chd.edu.cn/article/id/201201017 [17] 贺广宇. 基于LQR的列车精确停车控制算法研究[D]. 北京: 北京交通大学, 2009.HE Guang-yu. Research on train precision stop control algorithm based on LQR[D]. Beijing: Beijing Jiaotong University, 2009. (in Chinese). [18] 周骥, 陈德旺. 机器学习在列车精确停车问题的应用[J]. 计算机工程与应用, 2010, 46(25): 226-230. https://www.cnki.com.cn/Article/CJFDTOTAL-JSGG201025069.htmZHOU Ji, CHEN De-wang. Applications of machine learning methods in problem of precise train stopping[J]. Computer Engineering and Applications, 2010, 46(25): 226-230. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JSGG201025069.htm [19] CHEN De-wang, CHEN Rong, LI Yi-dong, et al. Online learning algorithms for train automatic stop control using precise location data of Balises[J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(3): 1526-1535. [20] WANG Yi, HOU Zhong-sheng, LI Xing-yi. A novel automatic train operation algorithm based on iterative learning control theory[C]//IEEE. 2008 IEEE International Conference on Service Operations and Logistics, and Informations. New York: IEEE, 2008: 1766-1770. [21] LIU Wen-tao, TANG Tao, SU Shuai, et al. An intelligent train control approach based on the Monte Carlo reinforcement learning algorithm[C]//IEEE. 21st International Conference on Intelligent Transportation Systems. New York: IEEE, 2018: 1944-1949. [22] ZHU Li, HE Ying, YU F R, et al. Communication-based train control system performance optimization using deep reinforcement learning[J]. IEEE Transactions on Vehicular Technology, 2017, 66(12): 10705-10717. [23] YIN Jia-teng, CHEN De-wang, LI Ling-xi. Intelligent train operation algorithms for subway by expert system and reinforcement learning[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(6): 2561-2571. [24] 张彦栋, 王青元, 刘强强, 等. 自动驾驶系统运行模式曲线最优预见跟踪控制算法[J]. 计算机应用, 2017, 37(增2): 266-269.ZHANG Yan-dong, WANG Qing-yuan, LIU Qiang-qiang, et al. Optimal preview tracking control algorithm for ATO system[J]. Journal of Computer Applications, 2017, 37(S2): 266-269. (in Chinese). [25] HOU Zhong-sheng, WANG Yi, YIN Chen-kun, et al. Terminal iterative learning control based station stop control of a train[J]. International Journal of Control, 2011, 84(7): 1263-1274. [26] 杨辉, 严瑾, 张坤鹏. 动车组制动过程多模型自适应PID控制[J]. 铁道学报, 2014, 36(3): 42-48. https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB201403010.htmYANG Hui, YAN Jin, ZHANG Kun-peng. Multiple-model self-tuning fuzzy pid control of braking process of electric multiple unit[J]. Journal of the China Railway Society, 2014, 36(3): 42-48. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB201403010.htm [27] 杨辉, 张芳, 张坤鹏, 等. 基于分布式模型的动车组预测控制方法[J]. 自动化学报, 2014, 40(9): 1912-1921. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201409010.htmYANG Hui, ZHANG Fang, ZHANG Kun-peng, et al. Predictive control using a distributed model for electric multiple unit[J]. Acta Automatica Sinica, 2014, 40(9): 1912-1921. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201409010.htm [28] 李中奇, 杨辉, 刘明杰, 等. 高速动车组制动过程的建模及跟踪控制[J]. 中国铁道科学, 2016, 37(5): 80-86. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK201605012.htmLI Zhong-qi, YANG Hui, LIU Ming-jie, et al. Modeling and tracking control for braking process of high speed electric multiple unit[J]. China Railway Science, 2016, 37(5): 80-86. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK201605012.htm [29] 王龙生. 基于多质点模型的高速列车自动驾驶预测控制[D]. 北京: 北京交通大学, 2016.WANG Long-sheng. Predictive control for automatic operation of high-speed trains based on multi-point model[D]. Beijing: Beijing Jiaotong University, 2016. (in Chinese). [30] 魏永松. 分布式动力高速动车组的预测控制与动态仿真[D]. 上海: 上海交通大学, 2013.WEI Yong-song. Predictive control and dynamic simulation for high speed train with distributed power[D]. Shanghai: Shanghai Jiaotong University, 2013. (in Chinese). [31] 裴明高. 城轨列车自动驾驶多目标牵引控制算法研究与仿真[D]. 兰州: 兰州交通大学, 2016.PEI Ming-gao. Research and simulation on automatic train operation control algorithm of multi-objective traction in urban rail transit[D]. Lanzhou: Lanzhou Jiaotong University, 2016. (in Chinese). [32] CAI Kai-long, TU Ming-wu. Research on neural network Smith predictive compensable fuzzy PID control for distributed system of aeroengine[C]∥IEEE. Proceedings of the 8th World Congress on Intelligent Control and Automation. New York: IEEE, 2010: 4564-4569. -

 下载:
下载:
 点击查看大图
点击查看大图
计量
- 文章访问数: 703
- HTML全文浏览量: 113
- PDF下载量: 593
- 被引次数: 0
