

-
摘要: 为了抑制蛇行运动,提高列车临界速度,针对铁道车辆特殊的轮轨自激振动系统综述了蛇行稳定性主动控制的总体结构形式、控制目标、控制算法、测量系统、作动系统、试验验证等关键环节的研究进展;概括了稳定性控制的典型结构形式及其各自的特点;根据不同运用场景,归纳了稳定性主动控制的主要目标,梳理了稳定性控制的主要算法以及优缺点;分析了不同反馈量测量方法的可行性和可靠性,研究了作动器动态特性对控制效果的影响;给出了稳定性控制的试验研究方法,展望了未来蛇行稳定性主动控制在算法设计、失效安全等方面的研究重点。研究结果表明:在蛇行稳定性主动控制研究中,控制方式和算法的选取要同时考虑控制目标的不同;除了高轮轨匹配等效锥度下的二次蛇行稳定性控制之外,控制目标应同时考虑低轮轨匹配等效锥度下的一次蛇行稳定性控制;控制方式应尽量简单、可靠、易于实施,且对测量系统的要求要小;测量系统也应尽量简单可测,以减小随机扰动和噪声对测量结果可靠性的影响;作动器响应时间及其时滞补偿方法共同决定了蛇行稳定性主动控制的实用效能;控制系统失效不能影响列车的运行安全,这是决定主动控制能否推广应用的关键。Abstract: In order to suppress the hunting motions and thus increase the critical speed of vehicles, the structure concepts, control objectives, control algorithms, measurement systems, actuation systems and experimental verifications were reviewed on the active control of hunting stability for the special self-excited vibration system of railway vehicles. The typical structural concepts and their characteristics were summarized. The main objectives of active stability control were concluded according to the different application scenarios, and the algorithms of stability control were also summarized, including their advantages and disadvantages. The feasibility and reliability of different feedback measurement methods were analyzed, and the influence of actuator dynamic characteristics on the control effect was commented. The experimental methods of active stability control were given, and the future research focus of active stability control were prospected with respect to algorithm design, failure safety, and some other aspects. Analysis results show that in the active control of hunting stability, the selection of control concept and algorithm should consider the different control objectives. In addition to the active control of secondary hunting stability under high wheel-rail combination conicity, the active control of primary hunting stability under low wheel-rail combination conicity should also be considered. The structure concept should be simple, reliable and easy to be implemented, and has a low requirement for the measurement system. The measurement system should be simple and measurable as far as possible to reduce the influence of random disturbance and noise on the reliability of measurement results. The practical effectiveness of active control of hunting stability is determined by the response time of actuator and the compensation method of time delay. The control system can not affect the safety of train operation after its failure, which is the most crucial aspect to decide the application of active control. 14 figs, 87 refs.
-
Key words:
- railway vehicle /
- hunting stability /
- active control /
- control algorithm /
- measurement system /
- actuation system
-

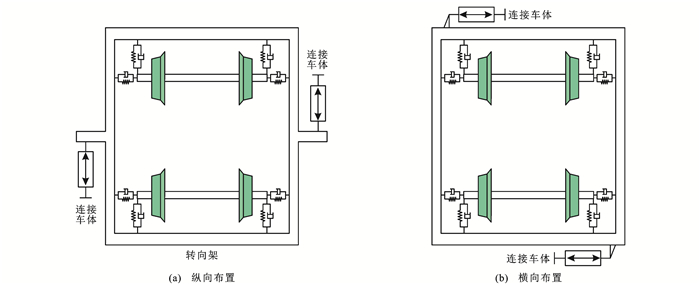
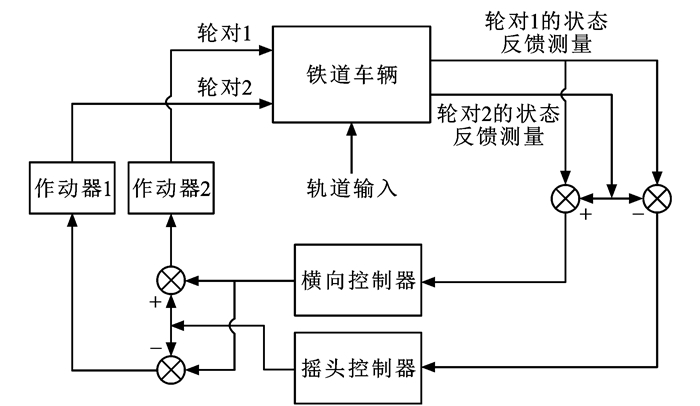
图 5 基于二系悬挂的稳定性控制结构
Figure 5. Stability control structures based on secondary suspension

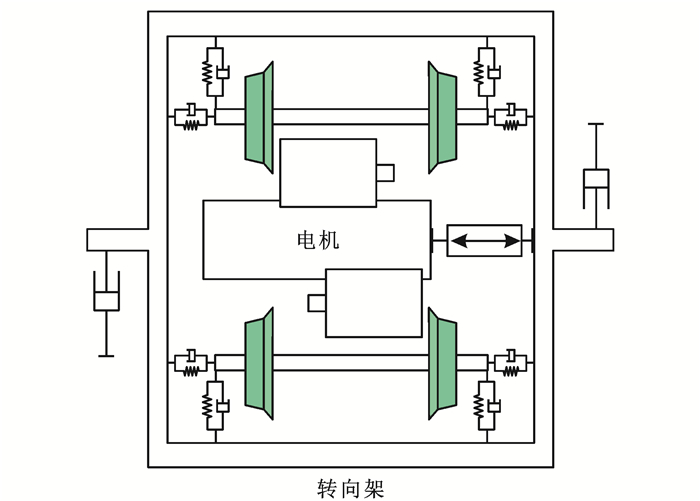
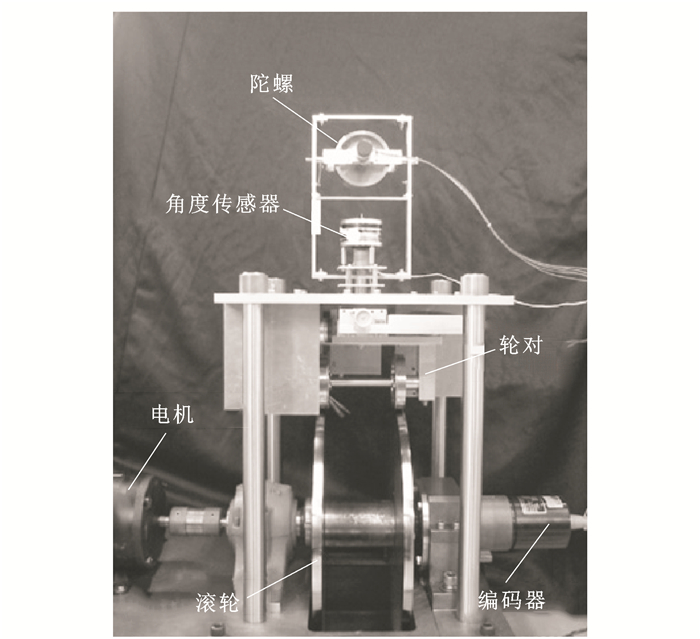
图 11 一系悬挂主动控制的试验转向架
Figure 11. Experimental bogie of primary suspension active control

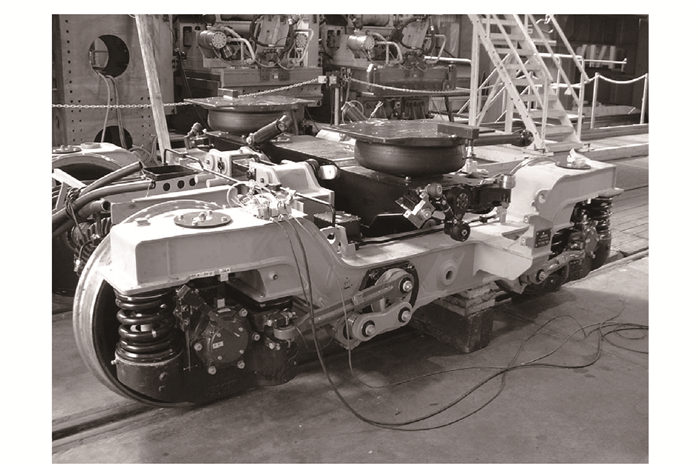
图 12 二系横向主动悬挂控制的全比例滚动台试验
Figure 12. Experiment of secondary lateral active suspension control on a full scale roller rig

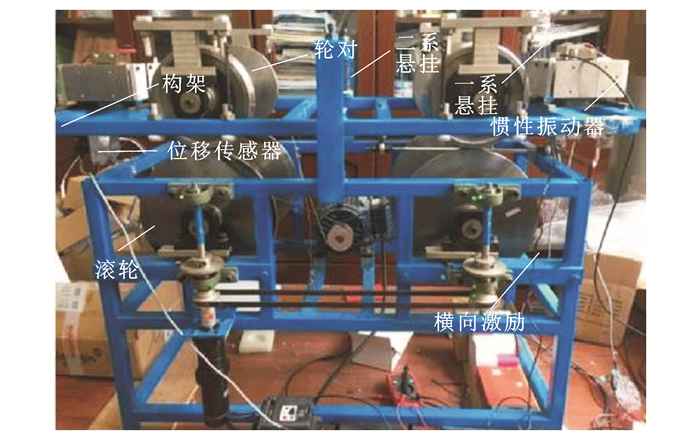
图 13 惯性振动器控制的1∶5小比例滚动台试验
Figure 13. Experiment of inertia vibrator control on a 1∶5 scaled roller rig
-
[1] WICKENS A H. The dynamic stability of railway vehicle wheelsets and bogies having profiled wheels[J]. International Journal of Solids and Structures, 1965, 1(3): 319-341. doi: 10.1016/0020-7683(65)90037-5 [2] 黄彩虹. 高速车辆减振技术研究[D]. 成都: 西南交通大学, 2012.HUANG Cai-hong. Study on vibration reduction technologies for high speed cars[D]. Chengdu: Southwest Jiaotong University, 2012. (in Chinese) [3] HEDRICK J K. Railway vehicle active suspensions[J]. Vehicle System Dynamics, 1981, 10(4/5): 267-283. [4] GOODALL R. Active railway suspensions: implementation status and technological trends[J]. Vehicle System Dynamics, 1997, 28(2/3): 87-117. [5] MEI T X, GOODALL R M. Recent development in active steering of railway vehicles[J]. Vehicle System Dynamics, 2003, 39(6): 415-436. doi: 10.1076/vesd.39.6.415.14594 [6] GOODALL R M, BRUNI S, MEI T X. Concepts and prospects for actively controlled railway running gear[J]. Vehicle System Dynamics, 2006, 44(S1): 60-70. doi: 10.1080/00423110600867374 [7] BRUNI S, GOODALL R, MEI T X, et al. Control and monitoring for railway vehicle dynamics[J]. Vehicle System Dynamics, 2007, 45(7/8): 743-779. [8] FU Bin, GIOSSI R L, PERSSON R, et al. Active suspension in railway vehicles: a literature survey[J]. Railway Engineering Science, 2020, 28(1): 3-35. doi: 10.1007/s40534-020-00207-w [9] DIANA G, BRUNI S, CHELI F, et al. Active control of the running behaviour of a railway vehicle: stability and curving performances[J]. Vehicle System Dynamics, 2002, 37(S1): 157-170. [10] SUDA Y. High speed stability and curving performance of longitudinally unsymmetric trucks with semi-active control[J]. Vehicle System Dynamics, 1994, 23(1): 29-52. doi: 10.1080/00423119408969048 [11] YAO Yuan, ZHANG Xiao-xia, LIU Xu. The active control of the lateral movement of a motor suspended under a high-speed locomotive[J]. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, 2016, 230(6): 1509-1520. doi: 10.1177/0954409715605138 [12] YAO Yuan, WU Guo-song, SARDAHI Y, et al. Hunting stability analysis of high-speed train bogie under the frame lateral vibration active control[J]. Vehicle System Dynamics, 2018, 56(2): 297-318. doi: 10.1080/00423114.2017.1375128 [13] YAO Yuan, YAN Ya-peng, HU Zhi-ke, et al. The motor active flexible suspension and its dynamic effect on the high-speed train bogie[J]. Journal of Dynamic Systems, Measurement and Control, 2018, 140(6): 064501. doi: 10.1115/1.4038389 [14] ZHANG Xiao-xia, WU Guo-song, LI Guang, et al. Actuator optimal placement studies of high-speed power bogie for active hunting stability[J]. Vehicle System Dynamics, 2020, 58(1): 108-122. doi: 10.1080/00423114.2019.1566556 [15] 姚远, SARDAHI Y, 孙建桥. 高速转向架电机横向悬挂时滞控制研究[C]//中国力学学会. 第十届全国动力学与控制学术会议. 北京: 中国力学学会, 2016: 197.YAO Yuan, SARDAHI Y, SUN Jian-qiao. Research on time lag control of lateral motor suspension for high-speed bogie[C]//Chinese Society of Theoretical and Applied Mechanics. The 10th National Conference on Dynamics and Control. Beijing: Chinese Society of Theoretical and Applied Mechanics, 2016: 197. (in Chinese) [16] SARDAHI Y, YAO Yuan, SUN Jian-qiao. Multi-objective optimal control of under-actuated bogie system of high speed trains[C]//ASME. Proceedings of the ASME 2016 Dynamic Systems and Control Conference. New York: ASME, 2016: 1-6. [17] YAO Yuan, LI Guang, SARDAHI Y, et al. Stability enhancement of a high-speed train bogie using active mass inertial actuators[J]. Vehicle System Dynamics, 2019, 57(3): 389-407. doi: 10.1080/00423114.2018.1469776 [18] HOU Yue, SONG Ya-dong, WU Guo-song, et al. Simulation and experimental study on the active stability of high-speed trains[J]. Computing in Science and Engineering, 2019, 21(3): 72-82. doi: 10.1109/MCSE.2019.2893159 [19] SHEN Gang, LI Qin. Research on railway vehicle stability control utilizing mass inertia method[C]//Springer. Proceedings of the 26th Symposium of the International Association of Vehicle System Dynamics. Berlin: Springer, 2020: 40-46. [20] 严亚鹏. 转向架主动稳定性研究与试验平台开发[D]. 成都: 西南交通大学, 2018.YAN Ya-peng. The study of bogie active stability and development of test platform[D]. Chengdu: Southwest Jiaotong University, 2018. (in Chinese) [21] 侯跃. 基于构架横向振动控制的高速列车主动稳定性研究[D]. 成都: 西南交通大学, 2019.HOU Yue. Research on active stability of high-speed train based on frame lateral vibration control[D]. Chengdu: Southwest Jiaotong University, 2019. (in Chinese) [22] YABUNO H, TAKANO H, OKAMOTO H, et al. Stabilization control of hunting motion of railway vehicle wheelset using gyroscopic damper[J]. Journal of Vibration and Control, 2008, 14(1/2): 209-230. http://www.researchgate.net/publication/245381534_Stabilization_Control_of_Hunting_Motion_of_Railway_Vehicle_Wheelset_Using_Gyroscopic_Damper [23] OKAMOTO H, KOTANI M, LIN S P, et al. Stabilization control for hunting motion of railway vehicle by gyroscopic damper (experimental analysis using 1/10 scale vehicle model)[C]//Japan Society of Mechanical Engineers. The Proceedings of the Transportation and Logistics Conference. Tokyo: Japan Society of Mechanical Engineers, 2007: 235-241. [24] NISHIMURA K, OKAMOTO H, LIN S P, et al. Experiment on stabilization of hunting motion by gyroscopic damper[C]//Japan Society of Mechanical Engineers. International Symposium on Speed-up, Safety and Service Technology for Railway and Maglev Systems 2009. Tokyo: Japan Society of Mechanical Engineers, 2009: 16-19. [25] LIN S, NISHIMURA K, OKAMOTO H, et al. Stabilization of hunting motion by gyroscopic damper[C]//Japan Society of Mechanical Engineers. The Proceedings of the Symposium on the Motion and Vibration Control. Tokyo: Japan Society of Mechanical Engineers, 2010: 1-10. [26] LIN S P, TOMIMATSU D, NISHIMURA K, et al. Stabilization of single axle truck hunting motion using a gyroscopic damper with a gravitational restoring mechanism[C]//POMBO J. Proceedings of the First International Conference on Railway Technology: Research, Development and Maintenance. Stirlingshire: Civil-Comp Press, 2012: 1-8. [27] YOSHINO H, HOSOYA T, YABUNO H, et al. Theoretical and experimental analyse on stabilization of hunting motion by utilizing the running gear as a gyroscopic damper[C]//DIMITROVOVÁ Z. Proceedings of the 11th International Conference on Vibration Problems. Lisbon: APMTAC, 2013: 9-12. [28] YOSHINO H, HOSOYA T, YABUNO H, et al. Theoretical and experimental analyses on stabilization of hunting motion by utilizing the traction motor as a passive gyroscopic damper[J]. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, 2015, 229(4): 395-401. doi: 10.1177/0954409715569860 [29] GRETZSCHEL M, BOSE L. A mechatronic approach for active influence on railway vehicle running behaviour[J]. Vehicle System Dynamics, 1999, 33(S1): 418-430. doi: 10.1080/00423114.1999.12063100 [30] GOODALL R M, LI H. Solid axle and independently-rotating railway wheelsets—a control engineering assessment of stability[J]. Vehicle System Dynamics, 2000, 33(1): 57-67. doi: 10.1076/0042-3114(200001)33:1;1-5;FT057 [31] HAUSCHILD W. Design of a limit cycle controller for the nonlinear wheel rail system[J]. Vehicle System Dynamics, 1981, 10(2): 109-114. doi: 10.1080/00423118108968647 [32] MEI T X, GOODALL R M. Wheelset control strategies for a two-axle railway vehicle[J]. Vehicle System Dynamics, 1999, 33(S1): 653-664. doi: 10.1080/00423114.1999.12063119 [33] MEI T X, FOO T H E, GOODALL R M. Genetic algorithms for optimising active controls in railway vehicles[C]//IEEE. Optimisation in Control: Methods and Applications. New York: IEEE, 1998: 1-8. [34] MEI T X, GOODALL R M. Modal controllers for active steering of railway vehicles with solid axle wheelsets[J]. Vehicle System Dynamics, 2000, 34(1): 25-41. doi: 10.1076/0042-3114(200008)34:1;1-K;FT025 [35] JEFFCOAT R L, WORMLEY D N. Active control techniques for improvement of rail vehicle lateral dynamic performance[J]. Vehicle System Dynamics, 1975, 4(2/3): 169-173. doi: 10.1080/00423117508968485 [36] BRUNI S, RESTA F. Active control of railway vehicles to avoid hunting instability[C]//IEEE. International Conference on Advanced Intelligent Mechatronics Proceedings. New York: IEEE, 2001: 231-236. [37] BRAGHIN F, BRUNI S, RESTA F. Active yaw damper for the improvement of railway vehicle stability and curving performances: simulations and experimental results[J]. Vehicle System Dynamics, 2006, 44(11): 857-869. doi: 10.1080/00423110600733972 [38] MEI T X, GOODALL R M. Optimal control strategies for active steering of railway vehicles[J]. IFAC Proceedings Volumes, 1999, 32(2): 2915-2920. doi: 10.1016/S1474-6670(17)56497-6 [39] ALFI S, PRANDI D, WARD C, et al. Active secondary yaw control to improve curving behavior of a railway vehicle[C]//Japan Society of Mechanical Engineers. Proceedings of International Symposium on Speed-up and Sustainable Technology for Railway and Maglev Systems 2015. Tokyo: Japan Society of Mechanical Engineers, 2015: 1-10. [40] TANIFUJI K, SATO T, GOODALL R. Active steering of a rail vehicle with two-axle bogies based on wheelset motion[J]. Vehicle System Dynamics, 2003, 39(4): 309-327. doi: 10.1076/vesd.39.4.309.14150 [41] WICKENS A H, GOODALL R M, LI J. Re-evaluation of the limitations of the railway wheelset: passive and active[J]. Vehicle System Dynamics, 2006, 44(S1): 14-23. doi: 10.1080/00423110600867200 [42] HUANG Cai-hong, ZENG Jing, LIANG Shu-ling. Carbody hunting investigation of a high speed passenger car[J]. Journal of Mechanical Science and Technology, 2013, 27(8): 2283-2292. doi: 10.1007/s12206-013-0611-z [43] 孟素英. 高速列车蛇行运动半主动控制研究[D]. 成都: 西南交通大学, 2018.MENG Su-ying. Research on semi-active control of hunting movement in high-speed trains[D]. Chengdu: Southwest Jiaotong University, 2018. (in Chinese) [44] 黄立. 车辆系统蛇行运动的主动控制[D]. 成都: 西南交通大学, 2019.HUANG Li. Active control of vehicle system hunting motion[D]. Chengdu: Southwest Jiaotong University, 2019. (in Chinese) [45] MEI T X, GOODALL R M. LQG and GA solutions for active steering of railway vehicles[J]. Control Theory and Applications, 2000, 147(1): 111-117. doi: 10.1049/ip-cta:20000145 [46] MEI T X, LI H. Control design for the active stabilization of rail wheelsets[J]. Journal of Dynamic Systems, Measurement, and Control, 2008, 130(1): 141-148. http://www.researchgate.net/publication/245372990_Control_Design_for_the_Active_Stabilization_of_Rail_Wheelsets [47] SELAMAT H, YUSOF R, GOODALL R M. Self-tuning control for active steering of a railway vehicle with solid-axle wheelsets[J]. IET Control Theory and Applications, 2008, 2(5): 374-383. doi: 10.1049/iet-cta:20070111 [48] PRANDI D. Railway bogie stability control from secondary yaw actuators[D]. Milan: Politecnico Di Milano, 2014. [49] ZHU Qiao, DING Jun-jun, YANG Ming-liang. LQG control based lateral active secondary and primary suspensions of high-speed train for ride quality and hunting stability[J]. IET Control Theory and Applications, 2018, 12(10): 1497-1504. doi: 10.1049/iet-cta.2017.0529 [50] PEARSON J T, GOODALL R M, MEI T X, et al. Active stability control strategies for a high speed bogie[J]. Control Engineering Practice, 2004, 12(11): 1381-1391. doi: 10.1016/S0967-0661(03)00152-7 [51] CELNIKER G W, HEDRICK J K. Rail vehicle active suspensions for lateral ride and stability improvement[J]. Journal of Dynamic Systems Measurement and Control, 1982, 104(1): 100-106. doi: 10.1115/1.3149619 [52] SARMA G N, KOZIN F. An active suspension system design for the lateral dynamics of a high-speed wheel-rail system[J]. Journal of Dynamic Systems Measurement and Control, 1971, 93(4): 233-241. doi: 10.1115/1.3426506 [53] 刘献栋, 杨绍普, 申永军, 等. 机车蛇行运动主动控制初探[J]. 非线性动力学学报, 2001, 8(3): 252-256.LIU Xian-dong, YANG Shao-pu, SHEN Yong-jun, et al. Tentative investigation on active control of the locomotive hunting[J]. Journal Nonlinear Dynamics in Science and Technology, 2001, 8(3): 252-256. (in Chinese) [54] SINHA P K, WORMLEY D N, HEDRICK J K. Rail passenger vehicle lateral dynamic performance improvement through active control[J]. Journal of Dynamic Systems Measurement and Control, 1978, 100(4): 270-283. doi: 10.1115/1.3426378 [55] WICKENS A H. Comparative stability of bogie vehicles with passive and active guidance as influenced by friction and traction[J]. Vehicle System Dynamics, 2009, 47(9): 1137-1146. doi: 10.1080/00423110802495800 [56] MEI T X, GOODALL R M. Stability control of railway bogies using absolute stiffness: sky-hook spring approach[J]. Vehicle System Dynamics, 2006, 44(S1): 83-92. doi: 10.1080/00423110600867440?tab=permissions&scroll=top [57] MATAMOROS-SANCHEZ A Z, GOODALL R M, ZOLOTAS A C, et al. Stability control of a railway vehicle using absolute stiffness and inerters[C]//IEEE. Proceedings of 2012 UKACC International Conference on Control. New York: IEEE, 2012: 120-127. [58] WANG Fu-cheng, LIAO Min-kai. The lateral stability of train suspension systems employing inerters[J]. Vehicle System Dynamics, 2010, 48(5): 619-643. doi: 10.1080/00423110902993654 [59] FOTOUHI A, YOUSEFI-KOMA A. Improve hunting of a railway vehicle using semi-active primary suspension[C]//ASME. Proceedings of the 8th Biennial Conference on Engineering Systems Design and Analysis. New York: ASME, 2006: 1-4. [60] ABOOD K H A, KHAN R A. Investigation to improve hunting stability of railway carriage using semi-active longitudinal primary stiffness suspension[J]. Journal of Mechanical Engineering Research, 2010, 2(5): 97-105. http://www.researchgate.net/publication/228905191_Investigation_to_improve_hunting_stability_of_railway_carriage_using_semi-active_longitudinal_primary_stiffness_suspension [61] MOHAN A. Nonlinear investigation of the use of controllable primary suspensions to improve hunting in railway vehicles[D]. Blacksburg: Virginia Polytechnic Institute and State University, 2003. [62] AHMADIAN M, MOHAN A. Semiactive control of hunting stability in rail vehicles[C]//ASME. Proceedings of 2005 ASME International Mechanical Engineering Congress and Exposition. New York: ASME, 2005: 63-68. [63] MOHAN A, AHMADIAN M. Nonlinear investigation of the effect of primary suspension on the hunting stability of a rail wheelset[C]//ASME. Proceedings of the 2004 ASME/IEEE Joint Rail Conference. New York: ASME, 2004: 53-61. [64] SHEN Yong-jun, YANG Shao-pu, PAN Cun-zhi, et al. Semi-active control of hunting motion of locomotive based on magnetorheological damper[J]. International Journal of Innovative Computing, Information and Control, 2006, 2(2): 323-329. http://www.researchgate.net/publication/255570127_Semi-active_control_of_hunting_motion_of_locomotive_based_on_magnetorheological_damper [65] SUN Shuai-shuai. Semi-active MR technology for enhancing vehicle stability and ride comfort[D]. Wollongong: University of Wollongong, 2016. [66] HARRIS B J, SUN S S, LI W H. Improving stability and curving passing performance for railway vehicles with a variable stiffness MRF rubber joint[J]. Smart Material Structures, 2017, 26(3): 035055. doi: 10.1088/1361-665X/aa5b1f [67] SUN Shuai-shuai, DENG Hua-xia, LI Wei-hua, et al. Improving the critical speeds of high-speed trains using magnetorheological technology[J]. Smart Materials and Structures, 2013, 22(11): 115012. doi: 10.1088/0964-1726/22/11/115012 [68] DI PASQUALI L. Semi-active and full-active control of hunting vibration in a high-speed railway bogie[D]. Milan: Politecnico Di Milano, 2019. [69] 张坤, 刘志明, 金天贺. 高速车辆抗蛇行减振器可切换模糊控制研究[J]. 铁道机车车辆, 2018, 38(5): 34-38, 84. doi: 10.3969/j.issn.1008-7842.2018.05.09ZHANG Kun, LIU Zhi-ming, JIN Tian-he. Research on switchable fuzzy control of anti-yaw damper in high-speed train[J]. Railway Locomotive and Car, 2018, 38(5): 34-38, 84. (in Chinese) doi: 10.3969/j.issn.1008-7842.2018.05.09 [70] 申永军, 杨绍普, 邢海军. 磁流变阻尼器在机车蛇行运动控制中的应用[C]//北京交通大学. 2005全国博士生学术论坛(交通运输工程学科). 北京: 中国铁道出版社, 2005: 1542-1546.SHEN Yong-jun, YANG Shao-pu, XING Hai-jun. Application of magnetorheological damper in vibration control of locomotive hunting[C]//Beijing Jiaotong University. 2005 National Doctoral Academic Forum (Transportation Engineering). Beijing: China Railway Publishing House, 2015: 1542-1546. (in Chinese) [71] ZENG Jing, ZHANG Wei-hua, DAI Huan-yun, et al. Hunting instability analysis and H∞ controlled stabilizer design for high speed railway passenger car[J]. Vehicle System Dynamics, 1997, 29(1): 655-668. doi: 10.1080/00423119708969593 [72] GAJDÁR T, KORONDI P, RUDAS I, et al. Robust and sliding mode control for railway wheelset[C]//IEEE. Proceedings of the 1996 IEEE IECON: 22nd International Conference on Industrial Electronics, Control, and Instrumentation. New York: IEEE, 1996: 250-255. [73] 修源. 高速列车抗蛇行减振器主动控制研究[D]. 成都: 西南交通大学, 2015.XIU Yuan. Research on active yaw damper control of high-speed trains[D]. Chengdu: Southwest Jiaotong University, 2015. (in Chinese) [74] 高国生. 高速机车分岔与横向振动的非线性控制研究[D]. 北京: 北京交通大学, 2004.GAO Guo-sheng. Bifurcation control and stability control of the high-speed locomotive[D]. Beijing: Beijing Jiaotong University, 2004. (in Chinese) [75] YABUNO H, OKAMOTO T, AOSHIMA N. Stabilization control for the hunting motion of a railway wheelset[J]. Vehicle System Dynamics, 2001, 35(S1): 41-55. http://www.researchgate.net/publication/292415785_Stabilization_control_for_the_hunting_motion_of_a_railway_wheelset [76] MEI T X, GOODALL R M, LI H. Kalman filter for the state estimation of a 2-axle railway vehicle[C]//IEEE. Proceedings of 1999 European Control Conference. New York: IEEE, 1999: 2431-2435. [77] BAIASU D, GHITA G, SEBESAN I. Control system with magnetorheological fluid device for mitigation of the railway vehicle hunting oscillations[J]. Journal of Physics: Conference Series, 2013, 412(1): 012043-1-17. http://www.ingentaconnect.com/content/iop/jpcs/2013/00000412/00000001/art012043 [78] HA S H, CHOI S B, YOU W H. Stability analysis of railway vehicle featuring MR damper[J]. Transactions of the Korean Society for Noise and Vibration Engineering, 2008, 18(7): 732-740. (in Korean) doi: 10.5050/KSNVN.2008.18.7.732 [79] ZOLOTAS A C, PEARSON J T, GOODALL R M. Modelling requirements for the design of active stability control strategies for a high speed bogie[J]. Multibody System Dynamics, 2006, 15(1): 51-66. doi: 10.1007/s11044-006-2361-5 [80] PEARSON J T, GOODALL R M. An active stability system for a high speed railway vehicle[J]. Electronic Systems and Control Division Research, 2003: 11-14. http://www.researchgate.net/publication/245274137_an_active_stability_system_for_a_high_speed_railway_vehicle [81] PEARSON J T, GOODALL R M, MEI T X, et al. Control system design methodology of an active stabilisation system for a high speed railway vehicle[C]//IEEE. Proceedings of 2003 European Control Conference. New York: IEEE, 2003: 2396-2400. [82] DREHER G, JOBST F, MAUER L, et al. Active hunting control of a wheel/rail vehicle demonstrated up to 530 km·h-1 on the German roller test rig[J]. Vehicle System Dynamics, 1983, 12(1-3): 173-176. doi: 10.1080/00423118308968751 [83] FOO E, GOODALL R M. Active suspension control of flexible-bodied railway vehicles using electro-hydraulic and electro-magnetic actuators[J]. Control Engineering Practice, 2000, 8(5): 507-518. doi: 10.1016/S0967-0661(99)00188-4 [84] PACCHIONI A, GOODALL R M, BRUNI S. Active suspension for a two-axle railway vehicle[J]. Vehicle System Dynamics, 2010, 48(S1): 105-120. http://umpir.ump.edu.my/1960/ [85] YUSOF M H, GOODALL R M, DIXON R. Assessment of actuator requirements for active railway suspensions[J]. IFAC Proceedings Volumes, 2010, 43(18): 369-376. doi: 10.3182/20100913-3-US-2015.00082 [86] GÖTZ G. Safety engineering for an active hunting controller for bogies in wheel/rail systems[C]//KLAMT D. Proceedings of the 4th IFAC/IFIP/IFORS Conference. Oxford: Pergamon Press, 1984: 325-331. [87] IWNICKI S, JÖNSSON P A, GUSTAFSSON J, et al. The 'FORESEE' prototype, fully active, steered two axle railway vehicle[C]//KLOMP M. Proceedings of the 26th Symposium of the International Association of Vehicle system dynamics. Berlin: Springer, 2019: 3-15. -

 下载:
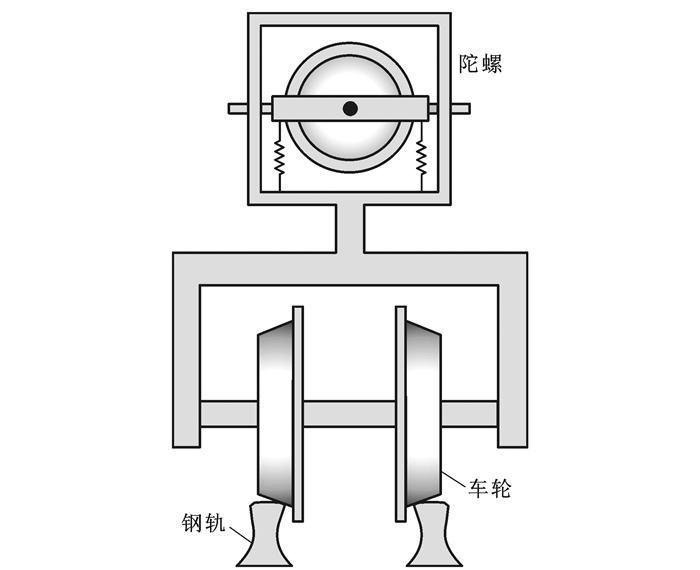
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 905
- HTML全文浏览量: 313
- PDF下载量: 378
- 被引次数: 0
