

Multi-objective control and optimization of active energy-regenerative suspension based on road recognition
-
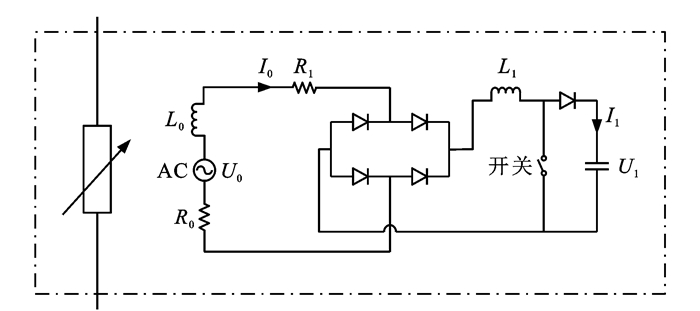
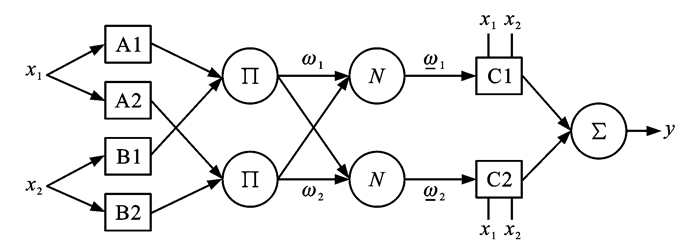
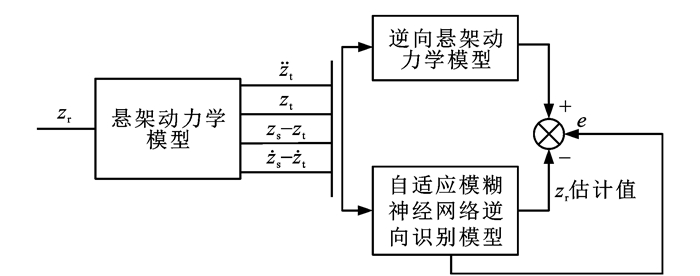
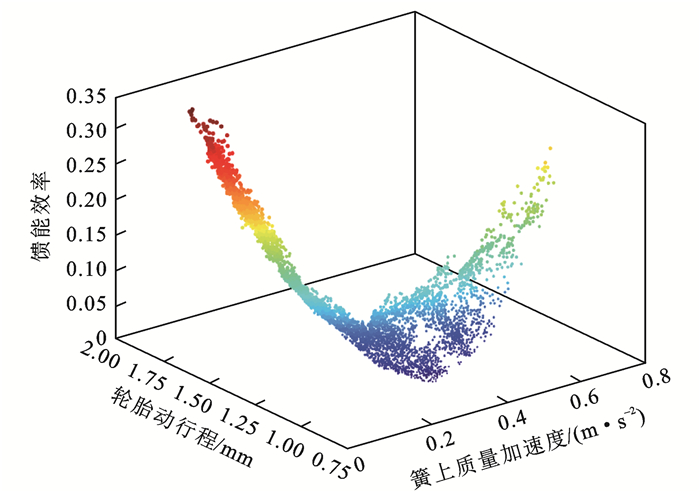
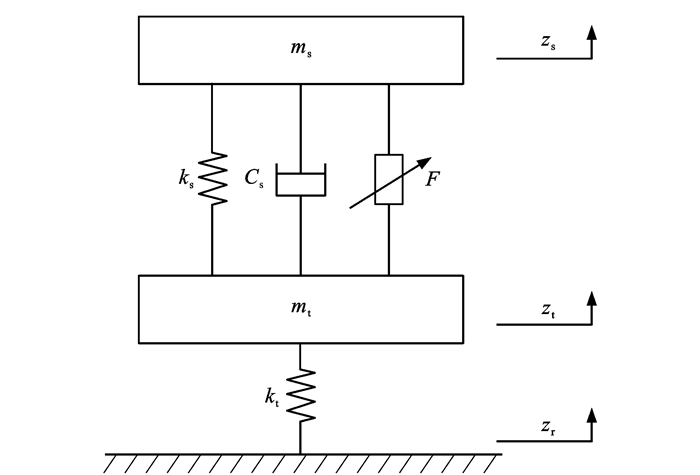
摘要: 针对主动悬架减振性能和馈能特性在不同等级路面适应性较差的问题,建立了非线性电磁主动悬架模型; 考虑车辆在行驶过程中悬架簧上质量存在不确定性,提出了一种主动悬架自适应滑模控制器; 基于不同路面下悬架动力学响应数据,采用自适应模糊神经网络算法识别路面等级,确定控制器目标系数,实现了主动悬架安全性和舒适性之间的协调; 研究了电磁主动悬架馈能特性及其切换控制策略,在此基础上,考虑电磁主动悬架安全性、舒适性和节能性的矛盾关系,采用多目标粒子群优化(MOPSO),以悬架动力学性能和馈能特性为设计目标综合优化控制器和悬架结构参数,并通过模糊集理论对多目标优化后的Pareto解集进行最优解选取。研究结果表明:模糊神经网络对不同等级路面下非线性电磁主动悬架的最大识别误差能够控制在10%以内,满足识别准确性要求; 在C级路面条件下,优化后的主动悬架与传统被动悬架相比,簧上质量振动加速度减小了35.3%,轮胎动行程增大了7.7%,但可以控制在10%的安全范围内; 与原主动悬架相比,优化后悬架簧上质量振动加速度减小了10.5%,馈能效率增大了1.7%,优化后自适应滑模控制器能够更好地协调悬架馈能特性和减振特性; 建立的非线性电磁主动悬架模型可实现不同路面等级下悬架系统安全性、舒适性和节能性的综合最优。Abstract: For the problem that the vibration reduction performance and energy-regenerative characteristics of active suspension are less adaptable under different road classes, a nonlinear electromagnetic active suspension model was constructed. Considering the suspension sprung mass uncertainty during vehicle driving, an adaptive sliding mode controller of active suspension was proposed. An adaptive fuzzy neural network and the dynamics data of suspension under different roads were used to recognize road classes and determine the objective coefficient of the controller. Then, the coordination between safety and comfort of active suspension was realized. The energy-regeneration characteristics and switch control strategies of electromagnetic active suspension were studied. On this basis, the suspension dynamic performance and energy-regeneration characteristic were taken as the design objectives, and the contradictory relationships between the safety, comfort, and energy efficiency of electromagnetic active suspension were considered to comprehensively optimize the controller and suspension structure parameters through the multi-objective particle swarm optimization (MOPSO). The optimal solution was acquired from the Pareto solution set after the multi-objective optimization according to the fuzzy set theory. Research result reveals that the fuzzy neural network gives a maximum recognition error within 10% for various road classes when the nonlinear electromagnetic active suspension is employed. Thus, it meets the requirement of recognition accuracy. For C-class roads, the vibration acceleration of sprung mass of optimized active suspension reduces by 35.3% compared with the traditional passive suspension. The tire dynamic displacement increases by 7.7%, but it is still within 10%, ensuring safety. Compared with the original active suspension, the optimized suspension has 10.5% less sprung mass vibration acceleration and 1.7% higher energy-regeneration efficiency. The optimized adaptive sliding mode controller can better balance the energy-regeneration and vibration reduction characteristics of suspension. The established nonlinear electromagnetic active suspension model can realize the comprehensive optimization of safety, comfort, and energy efficiency of suspension system under different road classes. 5 tabs, 9 figs, 30 refs.
-

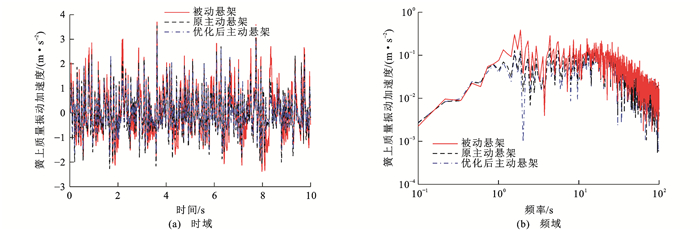
图 7 优化后主动悬架簧上质量振动加速度响应
Figure 7. Vibration acceleration responses of sprung mass of optimized active suspension

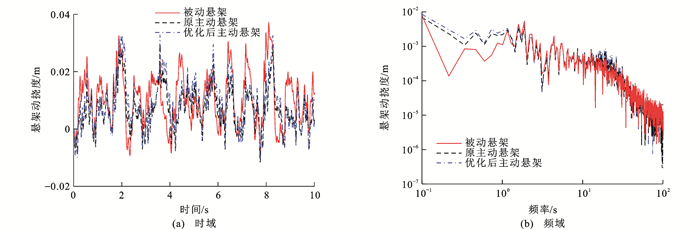
图 8 优化后主动悬架动挠度响应
Figure 8. Dynamic deflection responses of optimized active suspension

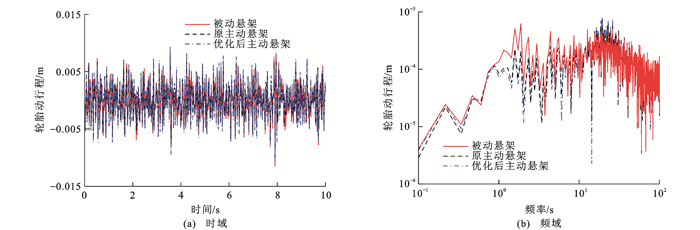
图 9 优化后主动悬架轮胎动行程响应
Figure 9. Tire dynamic displacement responses of optimized active suspension
表 1 主动悬架系统参数
Table 1. System parameters of active suspension
参数 数值 ms/kg 285 mt/kg 40 k1/(N·m-1) 15 680 k2/(N·m-3) 1 568 C1/(N·s·m-1) 1 780 C2/(N·s·m-2) 100 C3/(N·s·m-1) 1 000 kt/(N·m-1) 180 000 Ke/(V·s·m-1) 69 Kf/(V·s·m-1) 78 R0/Ω 5 Rl/Ω 0~1 000  下载: 导出CSV
下载: 导出CSV
表 2 不同路面识别误差
Table 2. Recognition errors in different roads
路面等级 识别误差均方根/mm 识别误差率/% A 8.3×10-6 0.26 B 3.2×10-4 1.37 C 3.6×10-3 4.65 D 9.4×10-3 8.12
下载: 导出CSV
表 3 不同路面等级下控制目标系数
Table 3. Control objective coefficients under different road classes
路面等级 q1 q2 q3 良好(A、B级) 0.80 0.80 1.20 一般(C、D级) 0.90 0.90 1.10 较差(E、F级) 0.95 0.95 1.05
下载: 导出CSV
表 4 主动悬架馈能切换控制策略
Table 4. Energy-regenerative switch control strategies of active suspension
路面等级 切换控制策略 良好(A、B级) 馈能模式 一般(C、D级) 馈能-主动模式 较差(E、F级) 主动模式
下载: 导出CSV
表 5 优化后主动悬架动力学性能和馈能效率
Table 5. Dynamics performance and energy-regenerative efficiency of optimized active suspension
参数 优化后主动悬架 原悬架 被动悬架 簧上质量加速度/(m·s-2) 0.726 1 0.844 4 1.123 0 变化量百分比/% -35.0 -24.0 0.0 悬架动挠度/m 0.011 8 0.010 0 0.010 7 变化量百分比/% 10.0 -6.5 0.0 车轮动行程/m 0.002 8 0.002 7 0.002 6 变化量百分比/% 7.7 3.8 0.0 馈能效率/% 7.10 5.44 0.00
下载: 导出CSV
-
[1] KARNOPP D, CROSBY M J, HARWOOD R A. Vibration control using semi-active force generators[J]. Journal of Engineering for Industry, 1974, 96(2): 619-626. doi: 10.1115/1.3438373 [2] HONG K S, SOHN H C, HEDRICK J K. Modified skyhook control of semi-active suspensions: a new model, gain scheduling, and hardware-in-the-loop tuning[J]. Journal of Dynamic Systems, Measurement, and Control, 2002, 124(1): 158-167. doi: 10.1115/1.1434265 [3] VALÁŠEK M, NOVÁK M, ŠIKA Z, et al. Extended ground-hook-new concept of semi-active control of truck's suspension[J]. Vehicle System Dynamics, 1997, 27(5/6): 289-303. doi: 10.1080/00423119708969333 [4] AHMADIAN M, PARE C A. A quarter-car experimental analysis of alternative semiactive control methods[J]. Journal of Intelligent Material Systems and Structures, 2000, 11(8): 604-612. doi: 10.1106/MR3W-5D8W-0LPL-WGUQ [5] THOMPSON A. An active suspension with optimal linear state feedback[J]. Vehicle System Dynamics, 1976, 5(4): 187-203. doi: 10.1080/00423117608968414 [6] RIZVI S M H, ABID M, KHAN A Q, et al. H∞ control of 8 degrees of freedom vehicle active suspension system[J]. Journal of King Saud University—Engineering Sciences, 2016, 30(2): 161-169. http://www.sciencedirect.com/science/article/pii/S1018-3639(16)00016-7 [7] 郑玲, 邓兆祥, 李以农. 汽车半主动悬架的滑模控制及鲁棒性[J]. 汽车工程, 2004, 26(6): 678-682. doi: 10.3321/j.issn:1000-680X.2004.06.014ZHENG Ling, DENG Zhao-xiang, LI Yi-nong. Sliding mode control for semi-active suspension systems and its robustness[J]. Automotive Engineering, 2004, 26(6): 678-682. (in Chinese) doi: 10.3321/j.issn:1000-680X.2004.06.014 [8] CHEN Xin-bo, WU Li-xin, YIN Jun, et al. Robust H∞ control design of an electromagnetic actuated active suspension considering the structure non-linearity[J]. Proceedings of the Institution of Mechanical Engineers Part D: Journal of Automobile Engineering, 2018, 233(3): 095440701775323. http://www.researchgate.net/publication/323176580_Robust_H_control_design_of_an_electromagnetic_actuated_active_suspension_considering_the_structure_non-linearity [9] 罗虹, 陈星, 邓兆祥, 等. 主动悬架的直线电机作动器控制系统研究[J]. 系统仿真学报, 2012, 24(7): 1537-1542. https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ201207034.htmLUO Hong, CHEN Xing, DENG Zhao-xiang, et al. Research on control system of linear motor actuator used in active suspension[J]. Journal of System Simulation, 2012, 24(7): 1537-1542. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ201207034.htm [10] KUMAR V, RANA K, KUMAR J, et al. Self-tuned robust fractional order fuzzy PD controller for uncertain and nonlinear active suspension system[J]. Neural Computing and Applications, 2018, 30(6): 1827-1843. doi: 10.1007/s00521-016-2774-x [11] BOUOUDEN S, CHADLI M, KARIMI R H. A robust predictive control design for nonlinear active suspension systems[J]. Asian Journal of Control, 2016, 18(1): 122-132. doi: 10.1002/asjc.1180 [12] LIU H, NONAMI K, HAGIWARA T. Active following fuzzy output feedback sliding mode control of real-vehicle semi-active suspensions[J]. Journal of Sound and Vibration, 2008, 314(1/2): 39-52. http://www.sciencedirect.com/science/article/pii/S0022460X08000242 [13] LIN Jiong-kang, CHENG Ka-wai, ZHANG Zhu, et al. Adaptive sliding mode technique-based electromagnetic suspension system with linear switched reluctance actuator[J]. IET Electric Power Applications, 2015, 9(1): 50-59. doi: 10.1049/iet-epa.2014.0115 [14] SUN Hao, LI Yong-ming, XU Kun, et al. Fuzzy adaptive backstepping control for a class of active suspension systems[J]. IFAC-Papers OnLine, 2018, 51(31): 136-141. doi: 10.1016/j.ifacol.2018.10.025 [15] LIU Bing, SAIF M, FAN Hui-jin, et al. Adaptive fault tolerant control of a half-car active suspension systems subject to random actuator failures[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(6): 2847-2857. doi: 10.1109/TMECH.2016.2587159 [16] 王骏骋, 何仁. 电动轮轮内主动减振器的非线性最优滑模模糊控制[J]. 汽车工程, 2018, 40(6): 719-725. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201806015.htmWANG Jun-cheng, HE Ren. Nonlinear optimal sliding mode fuzzy control for in-wheel active vibration damper of electric wheel[J]. Automotive Engineering, 2018, 40(6): 719-725. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201806015.htm [17] YAN Shu-ai, SUN Wei-chao. Self-powered suspension criterion and energy regeneration implementation scheme of motor-driven active suspension[J]. Mechanical Systems and Signal Processing, 2017, 94: 297-311. doi: 10.1016/j.ymssp.2017.03.006 [18] NAKANO K, SUDA Y, NAKADAI S. Self-powered active vibration control using a single electric actuator[J]. Journal of Sound and Vibration, 2003, 260(2): 213-235. doi: 10.1016/S0022-460X(02)00980-X [19] ABOUELNOUR A, HAMMAD N. Electric utilization of vehicle damper dissipated energy[J]. Electronics Research Institute, 2003, 25(6): 245-253. [20] CHEN S A, LI X, ZHAO L J, et al. Development of a control method for an electromagnetic semi-active suspension reclaiming energy with varying charge voltage in steps[J]. International Journal of Automotive Technology, 2015, 16(5): 765-773. doi: 10.1007/s12239-015-0077-3 [21] GAO Ze-peng, CHEN Si-zhong, ZHAO Yu-zhuang, et al. Numerical evaluation of compatibility between comfort and energy recovery based on energy flow mechanism inside electromagnetic active suspension[J]. Energy, 2019, 170: 521-536. doi: 10.1016/j.energy.2018.12.193 [22] 黄昆, 张勇超, 喻凡, 等. 电动式主动馈能悬架综合性能的协调性优化[J]. 上海交通大学学报, 2009, 43(2): 226-230. doi: 10.3321/j.issn:1006-2467.2009.02.015HUANG Kun, ZHANG Yong-chao, YU Fan, et al. Coordinate optimization for synthetical performance of electrical energy-regenerative active suspension[J]. Journal of Shanghai Jiaotong University, 2009, 43(2): 226-230. (in Chinese) doi: 10.3321/j.issn:1006-2467.2009.02.015 [23] 喻凡, 张勇超. 馈能型车辆主动悬架技术[J]. 农业机械学报, 2010, 41(1): 1-6. doi: 10.3969/j.issn.1000-1298.2010.01.001YU Fan, ZHANG Yong-chao. Technology of regenerative vehicle active suspensions[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(1): 1-6. (in Chinese) doi: 10.3969/j.issn.1000-1298.2010.01.001 [24] 秦也辰, 董明明, 赵丰, 等. 基于路面识别的车辆半主动悬架控制[J]. 东北大学学报(自然科学版), 2016, 37(8): 1138-1143. doi: 10.3969/j.issn.1005-3026.2016.08.016QIN Ye-chen, DONG Ming-ming, ZHAO Feng, et al. Suspension semi-active control of vehicles based on road profile classification[J]. Journal of Northeastern University (Natural Science), 2016, 37(8): 1138-1143. (in Chinese) doi: 10.3969/j.issn.1005-3026.2016.08.016 [25] WANG Ruo-chen, DING Ren-kai, CHEN Long. Application of hybrid electromagnetic suspension in vibration energy regeneration and active control[J]. Journal of Vibration and Control, 2016, 24(1): 223-233. http://smartsearch.nstl.gov.cn/paper_detail.html?id=c0b5118299933bb1b4bbead842c20fc9 [26] CHEN Shi-an, WANG Jun-cheng, YAO Ming, et al. Improved optimal sliding mode control for a non-linear vehicle active suspension system[J]. Journal of Sound and Vibration, 2017, 395: 1-25. doi: 10.1016/j.jsv.2017.02.017 [27] ATAEI M, ASADI E, GOODARZI A, et al. Multi-objective optimization of a hybrid electromagnetic suspension system for ride comfort, road holding and regenerated power[J]. Journal of Vibration and Control, 2017, 23(5): 782-793. doi: 10.1177/1077546315585219 [28] KILICASLAN S. Control of active suspension system considering nonlinear actuator dynamics[J]. Nonlinear Dynamics, 2018, 91(1): 1383-1394. doi: 10.1007/s11071-017-3951-x/email/correspondent/c1/new [29] KOSHKOUEI A J, BURNHAM K J. Sliding mode controllers for active suspensions[C]//IFAC. Proceedings of the 17th World Congress of the International Federation of Automatic Control. Seoul: IFAC, 2008: 3416-3421. [30] 刘金琨, 孙富春. 滑模变结构控制理论及其算法研究与进展[J]. 控制理论与应用, 2007, 24(3): 407-418. doi: 10.3969/j.issn.1000-8152.2007.03.015LIU Jin-kun, SUN Fu-chun. Research and development on theory and algorithms of sliding mode control[J]. Control Theory and Applications, 2007, 24(3): 407-418. (in Chinese) doi: 10.3969/j.issn.1000-8152.2007.03.015 -


 点击查看大图
点击查看大图
计量
- 文章访问数: 879
- HTML全文浏览量: 366
- PDF下载量: 145
- 被引次数: 0
