

Structural equation model of drivers' takeover behaviors in autonomous driving environment
-
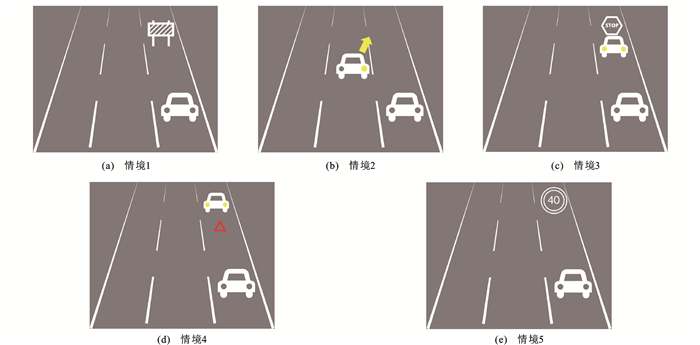
摘要: 为提取自动驾驶环境下驾驶人接管行为的关键影响因素,使用驾驶模拟器和眼动仪进行自动驾驶环境下驾驶人接管试验;采集了11个受试者对5种接管情境的反应数据,包括车辆运行数据和眼部运动数据,并调查了受试者的个人属性;基于实测数据定性分析和情境差异定量分析的结果,利用AMOS软件建立了描述驾驶人接管行为的结构方程模型;假设纵向接管行为、横向接管行为和眼部运动行为是3个潜在变量,找到可以表征这3个潜在变量的9个观测变量;根据修正指数多次修正得到最终的结构方程模型,由此获得表征驾驶人接管行为的各变量间的关系及对应的参数。研究结果表明:驾驶人接管自动驾驶车辆的全过程可分为5个阶段,即感知反应、减速避让、加速回升、稳定恢复以及稳定运行;当左前方车辆汇入当前车道,此时驾驶人接管风险较高;横向驾驶行为与纵向驾驶行为、眼部运动行为均显著负相关,相关系数分别为-0.226和-0.223,纵向驾驶行为与眼部运动行为正相关,相关系数为0.152;平均速度、总体横摆角均值、一秒内扫视时间可分别高度解释驾驶人接管自动驾驶车辆时纵向、横向及眼部的潜在行为。可见,此模型能有效揭示驾驶人接管自动驾驶车辆的整体行为与局部行为,有助于改进人机交互模式与自动驾驶接管请求提示。Abstract: Tests were conducted to explore the key factors that influence drivers' takeover behaviors in an autonomous driving environment using a driving simulator and an eye movement instrument. Data were collected from 11 participants who responded to 5 takeover scenarios, including vehicle and eye movement data, and the participants' personal attributes were investigated. According to the results of measured data processed by qualitative analysis and situational difference processed by quantitative analysis, a structural equation model was established using AMOS to describe drivers' takeover behaviors. The longitudinal takeover behavior, lateral takeover behavior, and eye movement behavior were the three potential variables. Nine observed variables were identified to represent the three potential variables. Based on the modification indices, the final structural equation model was obtained using multiple amendments. Thus, the relationships between all the variables and the corresponding parameters were obtained to describe the drivers' takeover behaviors. Research results show that the entire process in which a driver takes over an autonomous driving vehicle can be divided into 5 stages, including perception and reaction, deceleration and avoidance, acceleration and ascending, stable recovery, and stable movement. The drivers' takeover risk is higher when a left-front vehicle merges into the current lane. The lateral driving behavior is negatively correlated with the longitudinal driving or eye movement behavior, with correlation coefficients of -0.226 and -0.223, respectively. The longitudinal driving behavior is positively correlated with the eye movement behavior, with a correlation coefficient of 0.152. Average speed, mean of the overall yaw angle, and saccade time in a second can interpret the potential longitudinal, lateral, and eye behaviors, respectively, when drivers takeover autonomous driving vehicles. Therefore, the research can reveal drivers' overall and local behaviors when they takeover autonomous driving vehicles, and can help improve the human-computer interaction mode and takeover request hints in autonomous driving. 10 tabs, 7 figs, 30 refs.
-

图 1 自动驾驶环境下驾驶人接管试验所采用的设备
Figure 1. Equipments used for drivers' takeover tests in autonomous driving environment

图 4 受试者面对第6次接管事件时速度随行驶距离的变化
Figure 4. Variations of speeds with distance when participants dealing with sixth takeover event

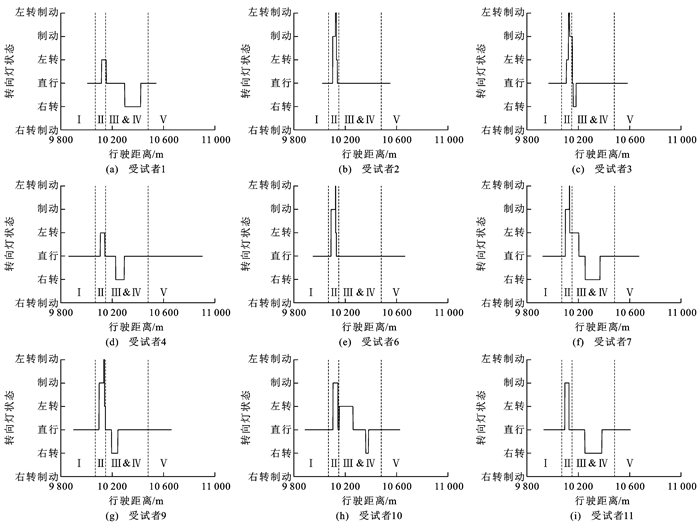
图 5 受试者面对第6次接管事件时转向灯随行驶距离的变化
Figure 5. Variations of turn lights with distance when participants dealing with sixth takeover event

图 6 第9个受试者面对第6次接管事件时接管行为参数随行驶距离的变化
Figure 6. Variations of takeover behavior parameters with distance when participant 9 dealing with sixth takeover event
表 1 驾驶人操作输入标准差的单因素方差分析
Table 1. ANOVA of standard deviations for drivers' operation inputs
紧急情境 样本量 加速输入标准差 制动输入标准差 转向盘输入标准差 转向盘旋转率标准差 均值 F检验值 p值 均值 F检验值 p值 均值 F检验值 p值 均值 F检验值 p值 情境1 18 0.200 3.551 0.010 0.030 4.410 0.003 0.022 2.808 0.031 0.239 1.894 0.119 情境2 36 0.247 0.070 0.020 0.219 情境3 18 0.252 0.042 0.017 0.191 情境4 9 0.166 0.019 0.023 0.168 情境5 9 0.261 0.055 0.012 0.126 总计 90 0.232 0.050 0.019 0.203  下载: 导出CSV
下载: 导出CSV
表 2 驾驶人眼部运动指标的单因素方差分析
Table 2. ANOVA of drivers' eye movement indicators
组别 样本量 左右眼瞳孔直径均值/mm 一秒内平均注视时间/s 一秒内平均扫视时间/s 每分钟眨眼次数 均值 F检验值 p值 均值 F检验值 p值 均值 F检验值 p值 均值 F检验值 p值 按情境分组 1 18 4.359 0.474 0.755 0.770 2.075 0.091 0.080 1.724 0.152 11.330 1.692 0.159 2 36 4.323 0.790 0.091 12.110 3 18 4.341 0.787 0.100 9.670 4 9 4.272 0.682 0.079 19.330 5 9 4.154 0.693 0.115 9.000 总计 90 4.312 0.765 0.092 11.880 按受试者分组 1 10 4.617 60.686 0.000 0.847 4.678 0.000 0.085 13.930 0.000 2.800 14.331 0.000 2 10 3.800 0.739 0.088 10.000 3 10 4.555 0.830 0.076 21.100 4 10 4.291 0.730 0.095 11.800 6 10 4.553 0.759 0.076 8.700 7 10 4.935 0.828 0.102 8.600 9 10 3.855 0.823 0.143 2.200 10 10 4.187 0.734 0.125 14.300 11 10 4.016 0.596 0.033 27.400 总计 90 4.312 0.765 0.092 11.880
下载: 导出CSV
表 3 观测变量与潜在变量及其关系
Table 3. Observed and latent variables and their relationships
潜在变量 观测变量 纵向接管行为(Y1) 总接管时间(X1) 平均速度(X2) 制动标准差(X3) 横向接管行为(Y2) 总体横摆角均值(X4) 转向盘标准差(X5) 左转横摆角均值(X6) 眼部运动行为(Y3) 一秒内扫视时间(X7) 每秒眨眼次数(X8) 总扫视时间(X9)
下载: 导出CSV
表 4 驾驶人接管行为量表
Table 4. Scales of drivers' takeover behaviors
编号 观测变量 X1 X2 X3 X4 X5 X6 X7 X8 X9 1 3 5 2 2 2 2 4 1 3 2 3 5 2 2 2 2 4 1 3 3 3 5 2 2 2 2 4 1 3 4 2 5 1 3 2 3 3 1 2 5 2 5 1 3 2 3 3 1 2 6 2 5 1 3 2 3 3 1 2 7 1 5 1 4 3 4 2 1 1
下载: 导出CSV
表 5 信度与效度检验
Table 5. Reliability and validity tests
检验项目 检验值 克隆巴赫系数 Y1为0.751, Y2为0.749, Y3为0.739 KMO取样适切性量数 0.605 巴特利特球度检验 近似卡方 598.968 自由度 36 显著性 0.000
下载: 导出CSV
表 6 结构方程模型的拟合指标
Table 6. Fitting indicators of structural equation model
拟合指标 判断准则 拟合值 卡方检验的显著性概率值 >0.05 0.458 卡方与自由度的比值 < 3 1.000 适配度指数 >0.9 0.978 调整后的适配度指数 >0.8 0.950 残差均方和平方根 < 0.08 0.059 渐进残差均方和平方根 < 0.08 0.001 规准适配指数 >0.8 0.922 增值适配指数 >0.9 1.000 比较适配指数 >0.9 1.000
下载: 导出CSV
表 7 驾驶人接管行为测量模型的因子载荷
Table 7. Factor loads of drivers' takeover behaviors obtained by measurement model
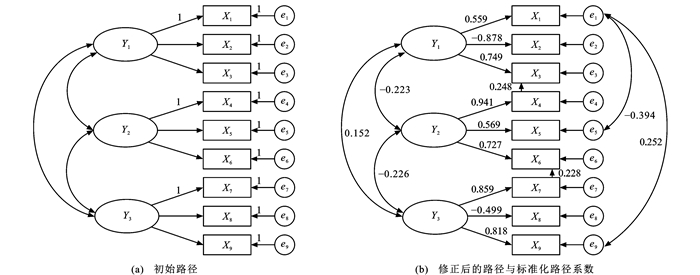
潜在变量 观测变量 标准化路径系数 Y1 X1 0.559 X2 -0.878 X3 0.749 Y2 X4 0.941 X5 0.569 X6 0.727 Y3 X7 0.859 X8 -0.499 X9 0.818
下载: 导出CSV
表 8 驾驶人接管行为潜在变量间的路径系数
Table 8. Path coefficients among latent variables for drivers' takeover behaviors
潜在变量之间的关系 标准化路径系数 p值 Y1与Y3 0.152 0.111 Y3与Y2 -0.226 0.012 Y1与Y2 -0.223 0.016
下载: 导出CSV
表 9 驾驶人接管行为观测变量间的路径系数
Table 9. Path coefficients among observed variables for drivers' takeover behaviors
观测变量之间的关系 标准化路径系数 p值 X7影响X6 0.228 0.000 X4影响X3 0.248 0.000
下载: 导出CSV
表 10 驾驶人接管行为观测变量残差项间的协方差
Table 10. Covariances among residuals of observed variables for drivers' takeover behaviors
残差项之间的关系 协方差 p值 e1与e5 -0.394 0.000 e1与e9 0.252 0.005
下载: 导出CSV
-
[1] SAE International. Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles[R]. New York: SAE International, 2018. [2] LU Zhen-ji, HAPPER R, CABRALL C D D, et al. Human factors of transitions in automated driving: a general framework and literature survey[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2016, 43: 183-198. doi: 10.1016/j.trf.2016.10.007 [3] 吴超仲, 吴浩然, 吕能超. 人机共驾智能汽车的控制权切换与安全性综述[J]. 交通运输工程学报, 2018, 18(6): 131-141. doi: 10.3969/j.issn.1671-1637.2018.06.014WU Chao-zhong, WU Hao-ran, LYU Neng-chao. Review of control switch and safety of human-computer driving intelligent vehicle[J]. Journal of Traffic and Transportation Engineering, 2018, 18(6): 131-141. (in Chinese) doi: 10.3969/j.issn.1671-1637.2018.06.014 [4] ERIKSSON A, BANKS V A, STANTON N A. Transition to manual: comparing simulator with on-road control transitions[J]. Accident Analysis and Prevention, 2017, 102: 227-234. doi: 10.1016/j.aap.2017.03.011 [5] GOLD C, DAMBÖCK D, LORENZ L, et al. "Take over!" How long does it take to get the driver back into the loop?[C]// HFES. Proceedings of the Human Factors and Ergonomics Society Annual Meeting. New York: SAGE Publications, 2013: 1938-1942. [6] FORSTER Y, NAUJOKS F, NEUKUM A, et al. Driver compliance to take-over requests with different auditory outputs in conditional automation[J]. Accident Analysis and Prevention, 2017, 109: 18-28. doi: 10.1016/j.aap.2017.09.019 [7] 张泽权. 自动驾驶接管中的触觉显示系统设计研究[D]. 广州: 华南理工大学, 2019.ZHANG Ze-quan. Study on the vibrotactile displays system of take-over requests for automated driving[D]. Guangzhou: South China University of Technology, 2019. (in Chinese) [8] YOON S H, KIM Y W, JI Y G. The effects of takeover request modalities on highly automated car control transitions[J]. Accident Analysis and Prevention, 2019, 123: 150-158. doi: 10.1016/j.aap.2018.11.018 [9] 钮建伟, 张雪梅, 孙一品, 等. 险情中驾驶人接管自动驾驶车辆的驾驶行为研究[J]. 中国公路学报, 2018, 31(6): 272-280. doi: 10.3969/j.issn.1001-7372.2018.06.014NIU Jian-wei, ZHANG Xue-mei, SUN Yi-pin, et al. Analysis of driving behavior during the takeover of automatic driving vehicles in dangerous traffic situations[J]. China Journal of Highway and Transport, 2018, 31(6): 272-280. (in Chinese) doi: 10.3969/j.issn.1001-7372.2018.06.014 [10] WAN Jing-yan, WU Chang-xu. The effects of lead time of take-over request and nondriving tasks on taking-over control of automated vehicles[J]. IEEE Transactions on Human-Machine Systems, 2018, 48(6): 582-591. doi: 10.1109/THMS.2018.2844251 [11] KIM J, KIM H S, KIM W, et al. Take-over performance analysis depending on the drivers' non-driving secondary tasks in automated vehicles[C]//IEEE. 9th International Conference on Information and Communication Technology Convergence: ICT Convergence Powered by Smart Intelligence. New York: IEEE, 2018: 1364-1366. [12] WANDTNER B, SCHMIDT G, SCHOEMIG N, et al. Non-driving related tasks in highly automated driving-effects of task modalities and cognitive workload on take-over performance[C]//Automotive Meets Electronics. 9th GMM Symposium Automotive meets Electronics. New York: VDE Verlag GmbH, 2018: 1-6. [13] ERIKSSON A, PETERMEIJER S M, ZIMMERMANN M, et al. Rolling out the red (and green) carpet: supporting driver decision making in automation-to-manual transitions[J]. IEEE Transactions on Human-Machine Systems, 2018, 49(1): 20-31. http://ieeexplore.ieee.org/document/8594655/ [14] WANG Jiao, SÖFFKER D. Bridging gaps among human, assisted, and automated driving with DVIs: a conceptional experimental study[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 20(6): 2096-2108. http://ieeexplore.ieee.org/document/8428654/ [15] KÖRBER M, GOLD C, LECHNER D, et al. The influence of age on the take-over of vehicle control in highly automated driving[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2016, 39: 19-32. doi: 10.1016/j.trf.2016.03.002 [16] GOLD C, KÖRBER M, HOHENBERGER C, et al. Trust in automation-before and after the experience of take-over scenarios in a highly automated vehicle[J]. Procedia Manufacturing, 2015, 3: 3025-3032. doi: 10.1016/j.promfg.2015.07.847 [17] KÖRBER M, CINGEL A, ZIMMERMANN M, et al. Vigilance decrement and passive fatigue caused by monotony in automated driving[J]. Procedia Manufacturing, 2015, 3: 2403-2409. doi: 10.1016/j.promfg.2015.07.499 [18] WU Yan-bin, KIHARA K, TAKEDA Y, et al. Effects of scheduled manual driving on drowsiness and response to take over request: a simulator study towards understanding drivers in automated driving[J]. Accident Analysis and Prevention, 2019, 124: 202-209. doi: 10.1016/j.aap.2019.01.013 [19] 徐超. 基于虚拟驾驶的切换型人机共驾行为评价[D]. 长春: 吉林大学, 2018.XU Chao. Evaluation of cooperative driving behavior based on the virtual driving[D]. Changchun: Jilin University, 2018. (in Chinese) [20] GOLD C, HAPPEE R, BENGLER K. Modeling take-over performance in level 3 conditionally automated vehicles[J]. Accident Analysis and Prevention, 2018, 116: 3-13. doi: 10.1016/j.aap.2017.11.009 [21] XIE Guo-tao, GAO Hong-bo, HUANG Bin, et al. A driving behavior awareness model based on a dynamic Bayesian network and distributed genetic algorithm[J]. International Journal of Computational Intelligence Systems, 2018, 11(1): 469-482. doi: 10.2991/ijcis.11.1.35 [22] ZHANG Li, YU Gui-zhen, ZHOU Bin, et al. Detection algorithm of takeover behavior of automatic vehicles' drivers based on deep learning[C]//IEEE. 4th International Conference on Intelligent Transportation Engineering. New York: IEEE, 2019: 126-130. [23] 仲任. 基于SEM的公路货运平台溢出效应研究[D]. 南昌: 华东交通大学, 2019.ZHONG Ren. Research on spillover effect of highway freight platform based on SEM[D]. Nanchang: East China Jiaotong University, 2019. (in Chinese) [24] 卞玉梅. 结构方程模型研究及其应用[D]. 大连: 大连海事大学, 2017.BIAN Yu-mei. Research and application of structural equation model[D]. Dalian: Dalian Maritime University, 2017. (in Chinese) [25] HASSAN H M. Investigation of the self-reported aberrant driving behavior of young male Saudi drivers: a survey-based study[J]. Journal of Transportation Safety and Security, 2016, 8(2): 113-128. doi: 10.1080/19439962.2015.1017782 [26] 刘玲莉, 田东东, 王子越. 私家车驾驶员驾驶行为与人格特质的关系研究[J]. 中国安全科学学报, 2019, 29(1): 13-18. https://www.cnki.com.cn/Article/CJFDTOTAL-ZAQK201901003.htmLIU Ling-li, TIAN Dong-dong, WANG Zi-yue. Study on relationships between driving behavior of private car drivers and their personality traits[J]. China Safety Science Journal, 2019, 29(1): 13-18. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZAQK201901003.htm [27] 杨丽平. 基于人格特质的驾驶人换道行为及决策过程研究[D]. 合肥: 合肥工业大学, 2018.YANG Li-ping. A study on drivers' lane-changing behavior and decision-making process based on personality traits[D]. Hefei: Hefei University of Technology, 2018. (in Chinese) [28] 秦雅琴, 张静, 贾现广, 等. 基于SEM的双车道公路超车行为安全评价[J]. 安全与环境学报, 2017, 17(4): 1359-1364. https://www.cnki.com.cn/Article/CJFDTOTAL-AQHJ201704032.htmQIN Ya-qin, ZHANG Jing, JIA Xian-guang, et al. Safety evaluation for the overtaking behavior on the two-lane highway based on the structural equation model[J]. Journal of Safety and Environment, 2017, 17(4): 1359-1364. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-AQHJ201704032.htm [29] 文江辉, 郭浩, 吴超仲, 等. 基于结构方程模型的疲劳驾驶行为影响因素间量化关系研究[J]. 交通信息与安全, 2014, 32(5): 95-102. doi: 10.3963/j.issn.1674-4861.2014.05.017WEN Jiang-hui, GUO Hao, WU Chao-zhong, et al. Quantitative relationship between influencing factors of fatigue driving behavior based on structural equation model[J]. Journal of Transport Information and Safety, 2014, 32(5): 95-102. (in Chinese) doi: 10.3963/j.issn.1674-4861.2014.05.017 [30] 温忠麟, 侯杰泰, 马什赫伯特. 结构方程模型检验: 拟合指数与卡方准则[J]. 心理学报, 2004, 2(9): 186-194. https://www.cnki.com.cn/Article/CJFDTOTAL-XLXB200402009.htmWEN Zhong-lin, HAU Kit-tai, MARSH H W. Structural equation model testing: cutoff criteria for goodness of fit indices and chi-square test[J]. Acta Psychologica Sinica, 2004, 2(9): 186-194. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XLXB200402009.htm -




 点击查看大图
点击查看大图

计量
- 文章访问数: 1120
- HTML全文浏览量: 400
- PDF下载量: 157
- 被引次数: 0
