

Lane changing trajectory planning of intelligent vehicle based on multiple objective optimization
-
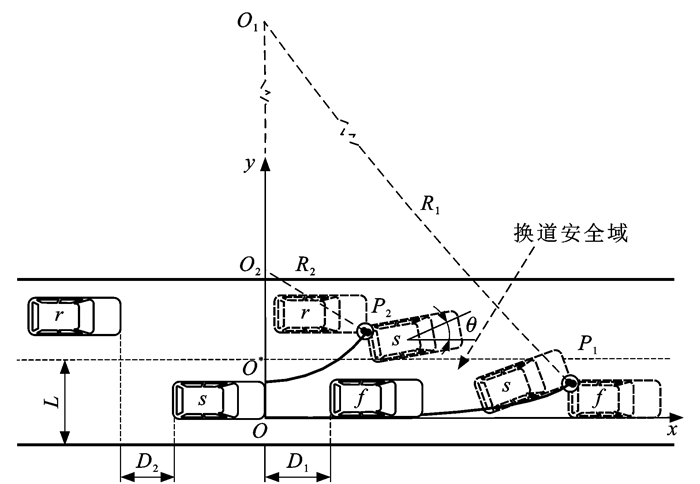
摘要: 为提高智能车辆换道轨迹规划的拟人性和实时性,提出了安全、舒适、节能等多目标协同优化的换道轨迹规划算法,该轨迹规划方法的适应性取决于车辆换道时间、纵横向速度及加速度等关键变量的约束条件;基于车辆运动学和动力学理论,分析了动态未知环境下车辆换道安全区域,建立了六次多项式车辆理想换道轨迹模型,并运用遗传算法-BP神经网络理论对换道终止时刻及目标位置进行预测,得到了复杂场景下车辆换道轨迹簇;分析了基于可行解空间的车辆换道安全性、舒适性、经济性等性能评价函数,构建了多性能目标协同优化目标函数和约束条件,运用鲸鱼优化算法对换道轨迹簇进行优化,实现多性能目标协同的智能车辆换道轨迹最优规划;为进一步验证多目标优化轨迹规划算法的准确性,运用L3级智能车辆测试平台对结构化道路场景下多目标优化换道轨迹规划算法进行了试验验证。仿真和试验结果表明:提出的轨迹规划算法在满足各项约束的情况下可成功实现平稳、安全换道,并且与传统驾驶人换道相比,换道过程的安全性、舒适性及多目标综合性能分别提升了5.1%、3.3%和1.7%,有效提升了动态环境下智能车辆换道轨迹规划的拟人性。Abstract: To improve the anthropomorphism and real-time performance of lane changing trajectory planning for intelligent vehicles, a lane changing trajectory planning algorithm based on the multi-objective collaborative optimization of safety, comfort, and energy saving was proposed. The adaptation of proposed trajectory planning method depended on the constraints of key variables such as lane changing time, longitudinal and lateral velocities, and accelerations. Based on the theory of vehicle kinematics and dynamics, the safe area of vehicle lane changing in dynamic unknown environments was analyzed, and the ideal lane-changing trajectory model of a sixth-degree polynomial was established. A genetic algorithm-back propagation neural network was used to predict the end time and target position of lane changing, and lane changing trajectory clusters in complex scenes were obtained. The performance evaluation functions of safety, comfort, and economy of vehicle lane changing based on feasible solution space were analyzed, and the objective function and constraint conditions of multi-objective collaborative optimization were constructed. The whale optimization algorithm was used to optimize the lane changing trajectory clusters to achieve an optimal lane changing trajectory planning of intelligent vehicles with multi-performance objectives. To further verify the accuracy of the multi-objective optimization trajectory planning algorithm, an L3-level intelligent vehicle test platform was used to test the algorithm for intelligent vehicles in structured road scenes. Simulation and experimental results show that the proposed algorithm can successfully achieve smooth and safe lane changing under various constraints. Compared with traditional lane changing of driver, the safety, comfort, and multi-objective comprehensive performance of the method are improved by 5.1%, 3.3%, and 1.7%, respectively, which effectively improves the personification of intelligent vehicle lane-changing trajectory planning in dynamic environments. 2 tabs, 11 figs, 30 refs.
-

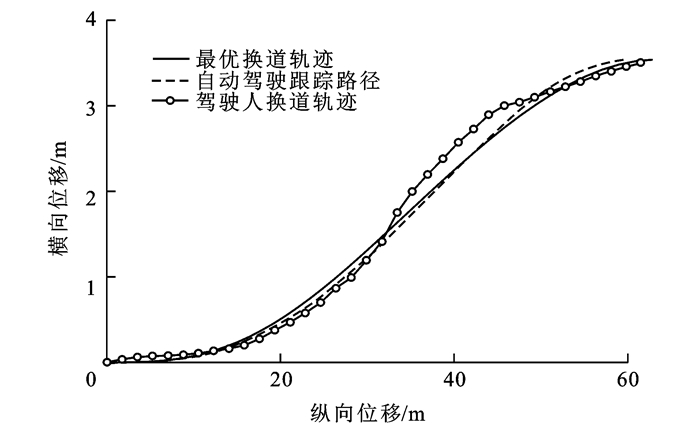
图 9 最优换道轨迹与驾驶人换道轨迹
Figure 9. Comparison between optimal lane changing trajectory and driver's lane changing trajectory

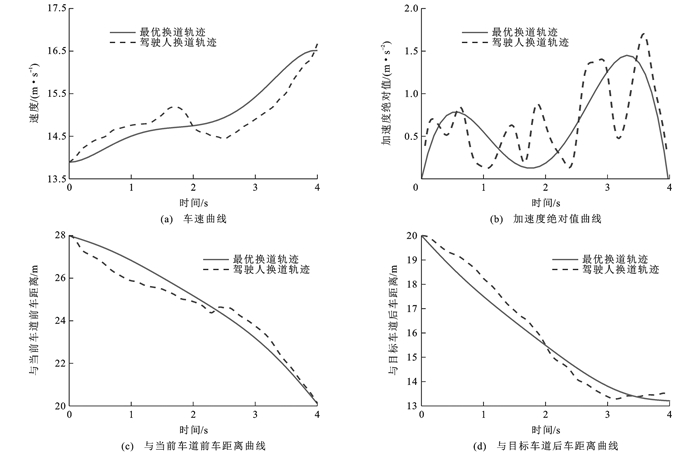
图 10 最优换道轨迹与驾驶人换道轨迹动态特性对比
Figure 10. Comparison of dynamic characteristics between optimal lane changing trajectory and driver's lane changing trajectory

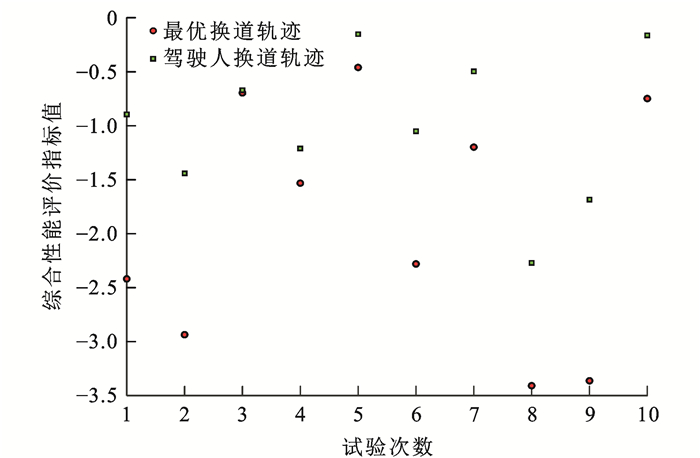
图 11 最优换道轨迹与驾驶人换道轨迹综合性能评价对比
Figure 11. Comparison of comprehensive performance evaluation between optimal lane changing trajectory and driver's lane changing trajectory
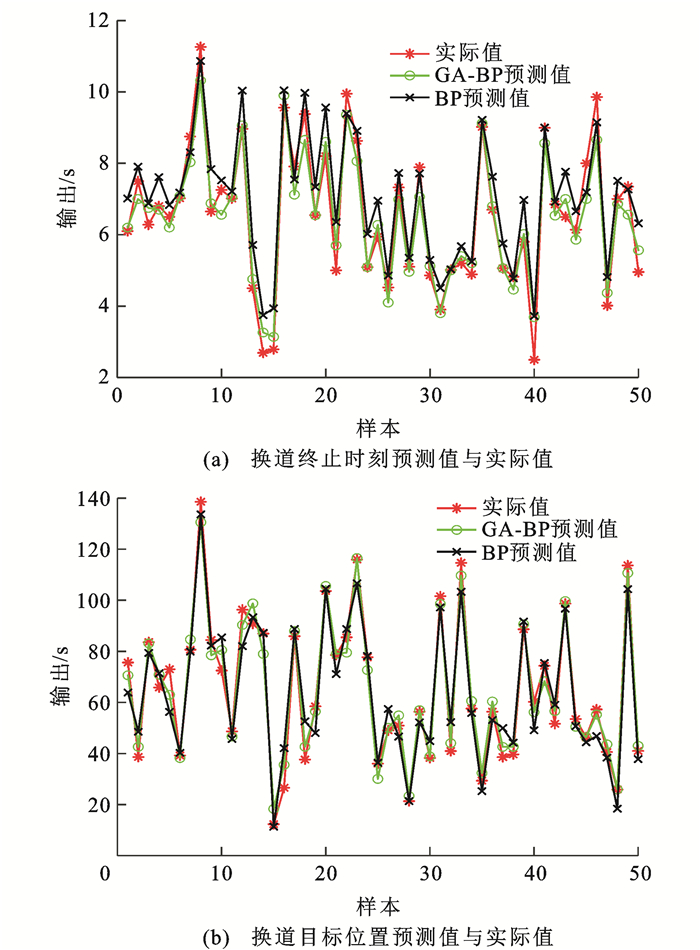
表 1 GA-BP神经网络输出误差分析
Table 1. Output error analysis of GA-BP neural network
指标 最大误差 平均绝对误差 均方根误差 BP神经网络 终止时刻/s 1.55 0.62 0.74 目标位置/m 8.25 4.57 7.48 GA-BP神经网络 终止时刻/s 1.19 0.40 0.50 目标位置/m 3.25 2.57 4.49  下载: 导出CSV
下载: 导出CSV
表 2 最优换道轨迹与驾驶人换道轨迹综合评价
Table 2. Comprehensive assessment of optimal lane changing trajectory and driver's lane changing trajectory
指标 Le(t)/g Lc(t)/(m·s-2) d1/m d2/m J 驾驶人换道 13.336 1.813 24.853 14.852 -0.178 最优轨迹换道 12.654 1.504 25.730 15.058 -0.236
下载: 导出CSV
-
[1] 李立, 徐志刚, 赵祥模, 等. 智能网联汽车运动规划方法研究综述[J]. 中国公路学报, 2019, 32(6): 20-33. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906003.htmLI Li, XU Zhi-gang, ZHAO Xiang-mo, et al. Review of motion planning methods of intelligent connected vehicles[J]. China Journal of Highway and Transport, 2019, 32(6): 20-33. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906003.htm [2] YANG Da, ZHENG Shi-yu, WEN Cheng, et al. A dynamic lane-changing trajectory planning model for automated vehicles[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 228-247. doi: 10.1016/j.trc.2018.06.007 [3] 陆建, 李英帅. 车辆换道行为建模的回顾与展望[J]. 交通运输系统工程与信息, 2017, 17(4): 48-55. https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201704008.htmLU Jian, LI Ying-shuai. Review and outlook of modeling of lane changing behavior[J]. Journal of Transportation Systems Engineering and Information Technology, 2017, 17(4): 48-55. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201704008.htm [4] 赵鑫, 胡广地. 平滑ARA*算法在智能车辆路径规划的应用[J]. 机械科学与技术, 2017, 36(8): 1272-1275. https://www.cnki.com.cn/Article/CJFDTOTAL-JXKX201708021.htmZHAO Xin, HU Guang-di. Application of smoothing ARA* algorithm in intelligent vehicles path planning[J]. Mechanical Science and Technology for Aerospace Engineering, 2017, 36(8): 1272-1275. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXKX201708021.htm [5] KIM S, LIKHACHEV M. Path planning for a tethered robot using multi-heuristic A* with topology-based heuristics[C]//IEEE. IEEE/RSJ International Conference on Intelligent Robots and Systems. New York: IEEE, 2015: 4656-4663. [6] JANSON L, SCHMERLING E, CLARK A, et al. Fast marching tree: a fast marching sampling-based method for optimal motion planning in many dimensions[J]. International Journal of Robotics Research, 2015, 34(7): 883-921. doi: 10.1177/0278364915577958 [7] 阮晓钢, 周静, 张晶晶, 等. 基于子目标搜索的机器人目标导向RRT路径规划算法[J]. 控制与决策, 2020, 35(10): 2543-2548. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC202010028.htmRUAN Xiao-gang, ZHOU Jing, ZHANG Jing-jing, et al. Robot goal guide RRT path planning based on sub-target search[J]. Control and Decision, 2020, 35(10): 2543-2548. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC202010028.htm [8] LUO Y, XIANG Y, CAO K. A dynamic automated lane change maneuver based on vehicle-to-vehicle communication[J]. Transportation Research Part C: Emerging Technologies, 2016, 62: 87-102. doi: 10.1016/j.trc.2015.11.011 [9] 陈成, 何玉庆, 卜春光, 等. 基于四阶贝塞尔曲线的无人车可行轨迹规划[J]. 自动化学报, 2015, 41(3): 486-496. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201503004.htmCHEN Cheng, HE Yu-qing, BU Chun-guang, et al. Feasible trajectory generation for autonomous vehicles based on Quartic Bezier Curve[J]. Acta Automatica Sinica, 2015, 41(3): 486-496. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201503004.htm [10] CAO Hao-tian, SONG Xiao-lin, HUANG Zheng-yu. Simulation research on emergency path planning of an active collision avoidance system combined with longitudinal control for an autonomous vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2016, 230(12): 1624-1653. doi: 10.1177/0954407015618533 [11] LEFEVRE S, CARVALHO A, BORRELLI F, et al. A learning- based framework for velocity control in autonomous driving[J]. IEEE Transactions on Automation Science and Engineering, 2016, 13(1): 32-42. doi: 10.1109/TASE.2015.2498192 [12] 安林芳, 陈涛, 成艾国, 等. 基于人工势场算法的智能车辆路径规划仿真[J]. 汽车工程, 2017, 39(12): 1451-1456. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201712015.htmAN Lin-fang, CHEN Tao, CHENG Ai-guo, et al. A simulation on the path planning of intelligent vehicles based on artificial potential field algorithm[J]. Automotive Engineering, 2017, 39(12): 1451-1456. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201712015.htm [13] 王洪斌, 郝策, 张平, 等. 基于A*算法和人工势场法的移动机器人路径规划[J]. 中国机械工程, 2019, 30(20): 2489-2496. doi: 10.3969/j.issn.1004-132X.2019.20.012WANG Hong-bin, HAO Ce, ZHANG Ping, et al. Path planning of mobile robots based on A* algorithm and artificial potential field algorithm[J]. China Mechanical Engineering, 2019, 30(20): 2489-2496. (in Chinese) doi: 10.3969/j.issn.1004-132X.2019.20.012 [14] BOROUJENI Z, GOEHRING D, ULBRICH F, et al. Flexible unit A-star trajectory planning for autonomous vehicles on structured road maps[C]//IEEE. 2017 IEEE International Conference on Vehicular Electronics and Safety. New York: IEEE, 2017: 7-12. [15] SAZGAR H, AZADI S, KAZEMI R. Trajectory planning and combined control design for critical high-speed lane change manoeuvres[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2019, 234(2/3): 823-839. http://www.researchgate.net/publication/332755678_Trajectory_planning_and_combined_control_design_for_critical_high-speed_lane_change_manoeuvres [16] 冀杰, 唐志荣, 吴明阳, 等. 面向车道变换的路径规划及模型预测轨迹跟踪[J]. 中国公路学报, 2018, 31(4): 172-179. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201804022.htmJI Jie, TANG Zhi-rong, WU Ming-yang, et al. Path planning and tracking for lane changing based on model predictive control[J]. China Journal of Highway and Transport, 2018, 31(4): 172-179. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201804022.htm [17] RASEKHIPOUR Y, KHAJEPOUR A, CHEN S K, et al. A potential field-based model predictive path-planning controller for autonomous road vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(5): 1255-1267. doi: 10.1109/TITS.2016.2604240 [18] 郭应时, 蒋拯民, 白艳, 等. 无人驾驶汽车路径跟踪控制方法拟人程度研究[J]. 中国公路学报, 2018, 31(8): 189-196. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201808022.htmGUO Ying-shi, JIANG Zheng-min, BAI Yan, et al. Investigation of humanoid level of path tracking methods based on autonomous vehicles[J]. China Journal of Highway and Transport, 2018, 31(8): 189-196. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201808022.htm [19] 付骁鑫, 江永亨, 黄德先, 等. 一种新的实时智能汽车轨迹规划方法[J]. 控制与决策, 2015, 30(10): 1751-1758. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201510003.htmFU Xiao-xin, JIANG Yong-heng, HUANG De-xian, et al. A novel real-time trajectory planning algorithm for intelligent vehicles[J]. Control and Decision, 2015, 30(10): 1751-1758. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201510003.htm [20] 张荣辉, 游峰, 初鑫男, 等. 车-车协同下无人驾驶车辆的换道汇入控制方法[J]. 中国公路学报, 2018, 31(4): 180-191. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201804023.htmZHANG Rong-hui, YOU Feng, CHU Xin-nan, et al. Lane change merging control method for unmanned vehicle under V2V cooperative environment[J]. China Journal of Highway and Transport, 2018, 31(4): 180-191. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201804023.htm [21] 孙扬, 熊光明, 陈慧岩, 等. 基于混沌理论的无人驾驶车辆行驶轨迹量化分析[J]. 机械工程学报, 2016, 52(2): 127-133. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201602021.htmSUN Yang, XIONG Guang-ming, CHEN Hui-yan, et al. Quantitative analysis of unmanned ground vehicles trajectories based on Chaos Theory[J]. Journal of Mechanical Engineering, 2016, 52(2): 127-133. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201602021.htm [22] SHIM T, ADIREDDY G, YUAN Hong-liang. Autonomous vehicle collision avoidance system using path planning and model-predictive-control-based active front steering and wheel torque control[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2012, 226(6): 767-778. http://www.researchgate.net/publication/258177553_Autonomous_vehicle_collision_avoidance_system_using_path_planning_and_model-predictive-control-based_active_front_steering_and_wheel_torque_control [23] 杨刚, 张东好, 李克强, 等. 基于车车通信的车辆并行协同自动换道控制[J]. 公路交通科技, 2017, 34(1): 120-129, 136. https://www.cnki.com.cn/Article/CJFDTOTAL-GLJK201701018.htmYANG Gang, ZHANG Dong-hao, LI Ke-qiang, et al. Cooperative same-direction automated lane-changing based on vehicle to vehicle communication[J]. Journal of Highway and Transportation Research and Development, 2017, 34(1): 120-129, 136. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GLJK201701018.htm [24] 赵树恩, 冷姚, 邵毅明. 车辆多目标自适应巡航显式模型预测控制[J]. 交通运输工程学报, 2020, 20(3): 206-216. https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202003023.htmZHAO Shu-en, LENG Yao, SHAO Yi-ming. Explicit model predictive control of multi-objective adaptive cruise of vehicle[J]. Journal of Traffic and Transportation Engineering, 2020, 20(3): 206-216. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202003023.htm [25] 张颖达, 邵春福, 李慧轩, 等. 基于NGSIM轨迹数据的换道行为微观特性分析[J]. 交通信息与安全, 2015, 33(6): 19-24, 32. https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS201506003.htmZHANG Ying-da, SHAO Chun-fu, LI Hui-xuan, et al. Microscopic characteristics of lane-change maneuvers based on NGSIM[J]. Journal of Transport Information and Safety, 2015, 33(6): 19-24, 32. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS201506003.htm [26] SHARMA R C, HARA K, HIRAYAMA H. A machine learning and cross-validation approach for the discrimination of vegetation physiognomic types using satellite based multispectral and multitemporal data[J]. Scientifica, 2017, DOI: 10.1155/2017/9806479. [27] SONG Xiao-lin, CAO Hao-tian, HUANG Jiang. Vehicle path planning in various driving situations based on the elastic band theory for highway collision avoidance[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2013, 227(12): 1706-1722. http://www.researchgate.net/publication/261923306_Vehicle_path_planning_in_various_driving_situations_based_on_the_elastic_band_theory_for_highway_collision_avoidance [28] 隗海林, 王劲松, 王云鹏, 等. 基于城市道路工况的汽车燃油消耗模型[J]. 吉林大学学报(工学版), 2009, 39(5): 1146-1150. https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY200905006.htmKUI Hai-lin, WANG Jin-song, WANG Yun-peng, et al. Vehicle fuel consumption model based on urban road operations[J]. Journal of Jilin University (Engineering and Technology Edition), 2009, 39(5): 1146-1150. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY200905006.htm [29] GENG Guo-qing, WU Zheng, JIANG Hao-bin, et al. Study on path planning method for imitating the lane changing operation of excellent drivers[J]. Applied Sciences, 2018, 8: 1-19. http://www.researchgate.net/publication/325267703_Study_on_Path_Planning_Method_for_Imitating_the_Lane-Changing_Operation_of_Excellent_Drivers [30] MIRJALILI S, LEWIS A. The whale optimization algorithm[J]. Advances in Engineering Software, 2016, 95: 51-67. -





 点击查看大图
点击查看大图
计量
- 文章访问数: 2290
- HTML全文浏览量: 968
- PDF下载量: 349
- 被引次数: 0
