

Two-stage UWB positioning algorithm of intelligent vehicle
-
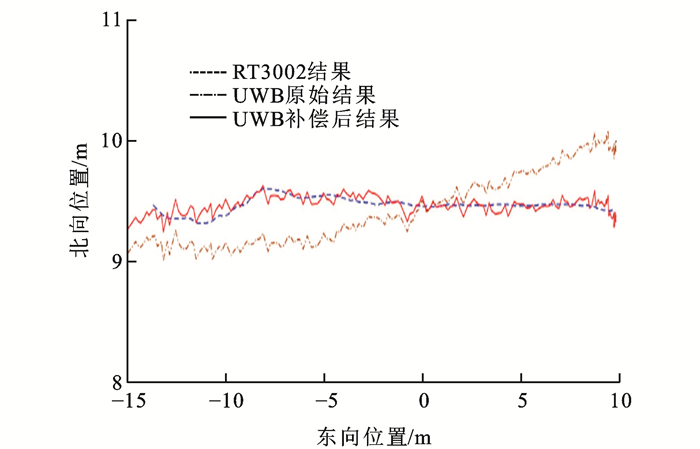
摘要: 为了提高智能汽车行驶的可靠性,以超宽带(UWB)为研究对象,研究了智能汽车两阶段UWB定位算法;分析了智能汽车UWB定位算法的基本原理与误差来源;建立了测距值筛选与加权位置解算两阶段UWB定位算法,在测距值筛选阶段,采用高斯筛选剔除小概率、大干扰事件,在加权位置解算过程中,根据多测距点的位置坐标加权计算得到最终的位置坐标,以有效减小非视距、多径效应所带来的误差,通过使用抗多径天线以有效减小多径效应所带来的误差,并分别建立了静态补偿和运动补偿策略,以有效减小设备晶振偏差等硬件问题造成的误差;在MATLAB/Simulink仿真平台中搭建一定测距方差约束下的UWB随机测距值仿真环境,对算法进行了仿真测试并与三边定位算法、三边质心定位算法进行仿真比较,分析基站数量对定位精度的影响;搭建实物UWB测试系统,对UWB设备定位精度进行了评估与误差补偿,并对两阶段UWB定位算法进行了实车测试。仿真结果表明:东向和北向的定位误差均值最小分别可达0.382 3、0.447 0 m;补偿后的UWB定位轨迹更接近RT3002所示的轨迹,东向和北向轨迹误差的平均值分别为0.049 2、0.017 8 m,均方根误差分别为0.069 8、0.0264 m。可见,提出的智能汽车两阶段UWB定位算法能够满足智能汽车的定位需求,具有高精度、低成本、稳定性好等优点。Abstract: To improve the driving reliability of intelligent vehicles, taking the ultra-wide band (UWB) as the research object, the two-stage UWB positioning algorithm for intelligent vehicles was studied. The basic principles and error sources of intelligent vehicle's UWB positioning algorithm were analyzed. A two-stage UWB positioning algorithm was established to filter the ranging values and calculate the weighted positions. In the filtering stage of ranging values, small probabilities and large interference events were eliminated through the Gaussian filtering. In the calculation stage of weighted positions, the final position coordinates were obtained by weighting the position coordinates of multiple ranging points to effectively reduce the errors caused by non-line-of-sight and multipath effects. The errors of multipath effects were effectively reduced by using the anti-multipath antennas, and the static and motion compensation strategies were established to effectively reduce the errors caused by hardware problems, such as the crystal deviation of the device. A simulation environment for UWB random ranging values under certain range variance constraints was built by using the MATLAB/Simulink simulation platform. The algorithm was simulated and compared with the trilateral positioning algorithm and the trilateral centroid positioning algorithm, and the impact of the number of base stations on positioning precision was analyzed. A physical UWB test system was built, the positioning precision of UWB equipment was evaluated, and the error compensation was performed. The two-stage UWB positioning algorithm was tested on a real vehicle. Simulation result shows that the mean values of positioning errors in the east and north directions can be as small as 0.382 3 and 0.447 0 m, respectively. The compensated UWB positioning trajectory is closer to the trajectory shown by RT3002. The average values of the east and north trajectory errors are 0.049 2 and 0.017 8 m, and the root mean square errors are 0.069 8 and 0.026 4 m, respectively. Thus, the proposed two-stage UWB positioning algorithm can meet the positioning requirements of intelligent vehicles, and has the advantages of high precision, low cost, and good stability. 2 tabs, 20 figs, 32 refs.
-

图 9 UWB三边定位算法仿真结果
Figure 9. Simulation result of trilateral positioning algorithm of UWB

图 10 UWB三边质心定位算法仿真结果
Figure 10. Simulation result of trilateral centroid positioning algorithm of UWB

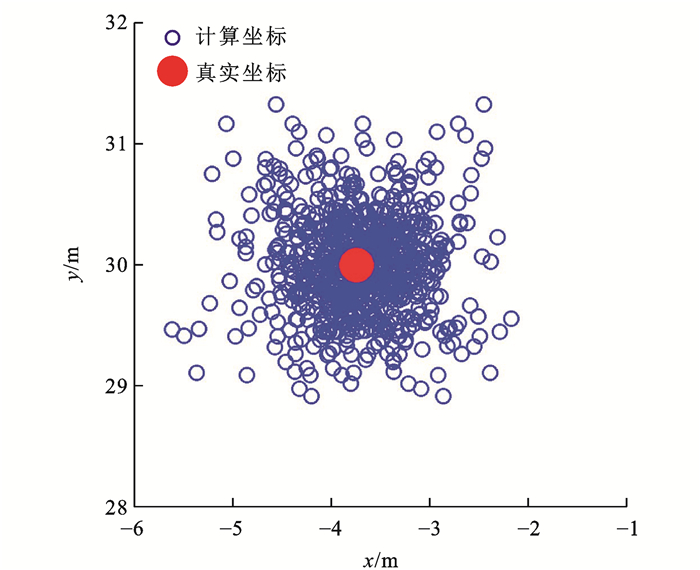
图 11 两阶段UWB定位算法仿真结果
Figure 11. Simulation result of two-stage UWB positioning algorithm

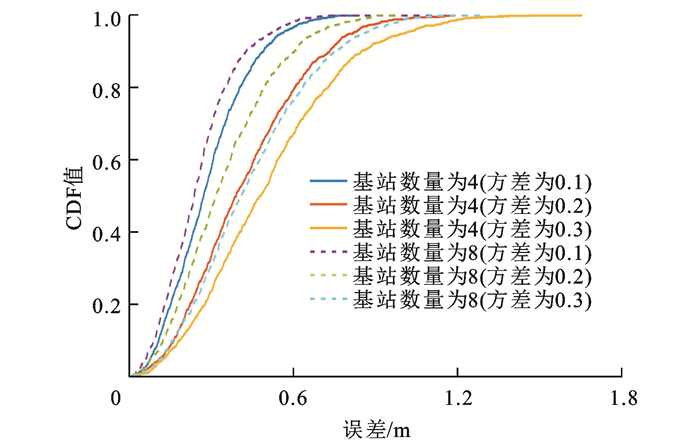
图 12 不同基站数量下的精度累计分布函数
Figure 12. Accuracy CDF under different numbers of base stations

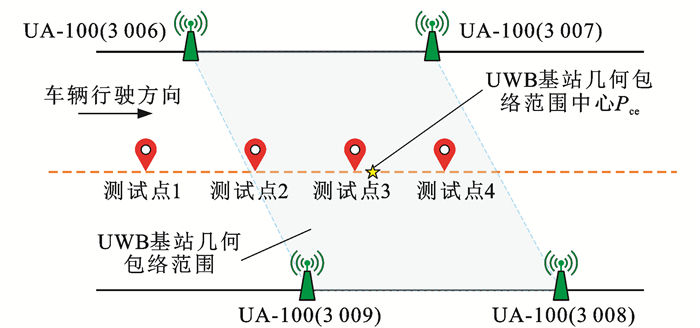
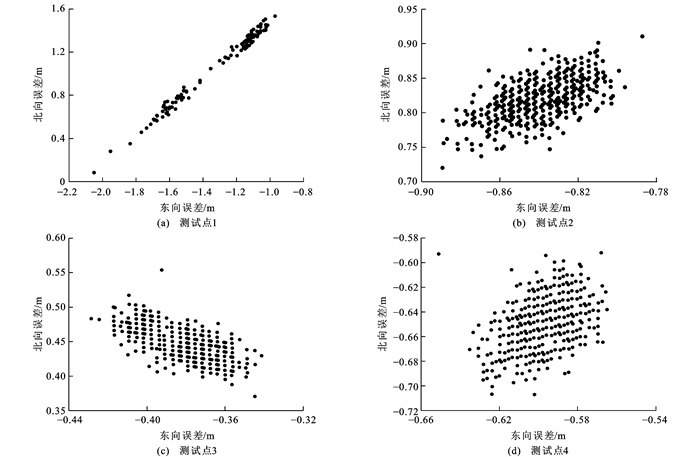
图 18 UWB设备静态测试点误差分布
Figure 18. Error distributions of UWB equipment static test points
表 1 UWB设备静态测试点定位精度
Table 1. Positioning precisions of static test points for UWB equipment
测试点 纵向距离/m 东向误差/m 北向误差/m 均值 均方根误差 均值 均方根误差 1 -14.627 8 1.405 6 0.268 1 1.068 9 0.351 5 2 -7.992 5 0.851 1 0.118 9 0.831 8 0.153 9 3 -1.326 1 0.392 3 0.097 6 0.457 1 0.139 7 4 7.422 9 0.587 1 0.107 9 0.659 8 0.153 9  下载: 导出CSV
下载: 导出CSV
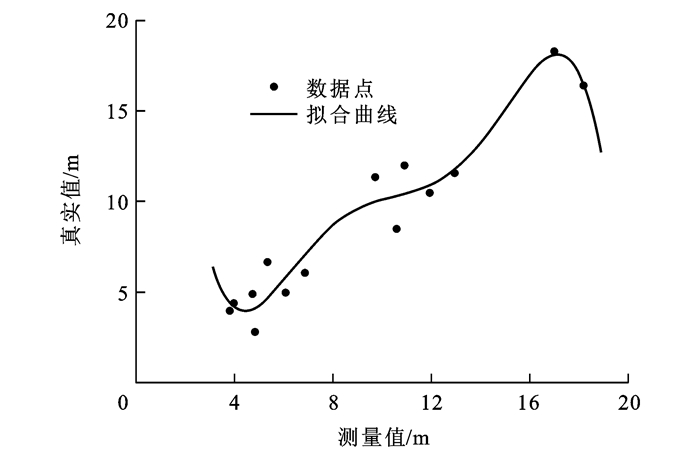
表 2 静态测试点测量值与实际值
Table 2. Ranging and actual values of static test points
测试点 测量值/m 真实值/m 1 4.913 8 2.948 8 2 3.887 6 4.129 8 3 3.857 2 4.553 4 4 4.836 5 4.808 8 5 6.159 5 5.112 2 6 6.953 4 6.182 8 7 5.422 2 6.811 1 8 10.693 1 8.593 7 9 11.841 7 10.576 4 10 9.788 5 11.388 2 11 12.861 1 11.634 7 12 10.811 1 11.888 3 13 18.295 7 16.475 8 14 17.121 2 18.379 4
下载: 导出CSV
表 3 UWB设备动态测试点定位精度
Table 3. Positioning precisions of dynamic test points for UWB equipment
测试点 纵向距离/m 东向误差/m 北向误差/m 均值 均方根误差 均值 均方根误差 1 -14.627 8 0.124 5 0.118 9 0.076 2 0.032 0 2 -7.992 5 0.067 2 0.068 2 0.027 4 0.018 4 3 -1.326 1 0.019 3 0.052 6 0.010 8 0.011 9 4 7.422 9 0.058 8 0.063 5 0.021 3 0.013 4
下载: 导出CSV
-
[1] 《中国公路学报》编辑部. 中国汽车工程学术研究综述·2017[J]. 中国公路学报, 2017, 30(6): 1-197. doi: 10.3969/j.issn.1001-7372.2017.06.001Editorial Department of China Journal of Highway and Transport. Review on China's automotive engineering research progress: 2017[J]. China Journal of Highway and Transport, 2017, 30(6): 1-197. (in Chinese) doi: 10.3969/j.issn.1001-7372.2017.06.001 [2] 柯敏. 基于多传感信息的智能汽车组合定位策略研究[D]. 长春: 吉林大学, 2019.KE Min. Research on integrated positioning strategy based on multi-sensor information for intelligent vehicles[D]. Changchun: Jilin University, 2019. (in Chinese) [3] 胡海峰, 史忠科, 徐德文. 智能汽车发展研究[J]. 计算机应用研究, 2004(6): 20-23. doi: 10.3969/j.issn.1001-3695.2004.06.007HU Hai-feng, SHI Zhong-ke, XU De-wen. Research on intelligent vehicle development[J]. Application Research of Computers, 2004(6): 20-23. (in Chinese) doi: 10.3969/j.issn.1001-3695.2004.06.007 [4] 刘江, 蔡伯根, 王云鹏. 基于GNSS/DSRC融合的协同车辆定位方法[J]. 交通运输工程学报, 2014, 14(4): 116-126. https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC201404016.htmLIU Jiang, CAI Bai-gen, WANG Yun-peng. Cooperative vehicle position method based on GNSS/DSRC fusion[J]. Journal of Traffic and Transportation Engineering, 2014, 14(4): 116-126. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC201404016.htm [5] LI W, CUI X, LU M. A robust graph optimization realization of tightly coupled GNSS/INS integrated navigation system for urban vehicles[J]. Tsinghua Science and Technology, 2018, 23(6): 724-732. doi: 10.26599/TST.2018.9010078 [6] TAO Z, BONNIFAIT P, FRÉMONT V, et al. Road-centered map-aided localization for driverless cars using single-frequency GNSS receivers[J]. Journal of Field Robotics, 2017, 34(5): 1010-1033. doi: 10.1002/rob.21708 [7] WANG J, BAI M, HUANG Y, et al. Study on GNSS/DR integrated navigation[C]//IEEE. 2017 29th Chinese Control and Decision Conference (CCDC). New York: IEEE, 2017: 4973-4979. [8] SKOG I, HANDEL P. In-car positioning and navigation technologies-a survey[J]. IEEE Transactions on Intelligent Transportation Systems, 2009, 10(1): 4-21. doi: 10.1109/TITS.2008.2011712 [9] ZAFARI F, GKELIAS A, LEUNG K K. A survey of indoor localization systems and technologies[J]. IEEE Communications Surveys and Tutorials, 2019, 21(3): 2568-2599. doi: 10.1109/COMST.2019.2911558 [10] 李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1): 1-14. doi: 10.3969/j.issn.1674-8484.2017.01.001LI Ke-qiang, DAI Yi-fan, LI Sheng-bo, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. Journal of Automotive Safety and Energy, 2017, 8(1): 1-14. (in Chinese) doi: 10.3969/j.issn.1674-8484.2017.01.001 [11] 丁锐, 钱志鸿, 王雪. 基于TOA和DOA联合估计的UWB定位方法[J]. 电子与信息学报, 2010, 32(2): 313-317. https://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201002012.htmDING Rui, QIAN Zhi-hong, WANG Xue. UWB positioning system based on joint TOA and DOA estimation[J]. Journal of Electronic and Information Technology, 2010, 32(2): 313-317. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201002012.htm [12] STOLL H, ZIMMER P, HARTMANNF, et al. GPS- independent localization for off-road vehicles using ultra-wideband (UWB)[C]//IEEE. 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC). New York: IEEE, 2017: 1-6. [13] 曹立波, 陈峥, 颜凌波, 等. 基于RFID、视觉和UWB的车辆定位系统[J]. 汽车工程, 2017, 39(2): 225-231. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201702017.htmCAO Li-bo, CHEN Zheng, YAN Ling-bo, et al. Vehicle positioning system based on RFID, vision and UWB[J]. Automotive Engineering, 2017, 39(2): 225-231. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201702017.htm [14] 段世红, 姚翠, 徐诚, 等. 传感网中UWB和IMU融合定位的性能评估[J]. 计算机研究与发展, 2018, 55(11): 2501-2510. doi: 10.7544/issn1000-1239.2018.20170661DUAN Shi-hong, YAO Cui, XU Cheng, et al. Performance evaluation of UWB and IMU fusion positioning in wireless sensor network[J]. Journal of Computer Research and Development, 2018, 55(11): 2501-2510. (in Chinese) doi: 10.7544/issn1000-1239.2018.20170661 [15] PRERADOVIC S, KARMAKAR N C. Chipless RFID: bar code of the future[J]. IEEE Microwave Magazine, 2010, 11(7): 87-97. doi: 10.1109/MMM.2010.938571 [16] DARDARI D, D'ERRICO R, ROBLIN C, et al. Ultrawide bandwidth RFID: the next generation[J]. Proceedings of the IEEE, 2010, 98(9): 1570-1582. doi: 10.1109/JPROC.2010.2053015 [17] 胡大伟, 陈希琼, 高扬. 定位-路径问题综述[J]. 交通运输工程学报, 2018, 18(1): 111-129. doi: 10.3969/j.issn.1671-1637.2018.01.011HU Da-wei, CHEN Xi-qiong, GAO Yang. Review on location- routing problem[J]. Journal of Traffic and Transportation Engineering, 2018, 18(1): 111-129. (in Chinese) doi: 10.3969/j.issn.1671-1637.2018.01.011 [18] URMSON C, ANHALT J, BAGNELL D, et al. Autonomous driving in urban environments: boss and the urban challenge[J]. Journal of Field Robotics, 2008, 25(8): 425-466. doi: 10.1002/rob.20255 [19] FONTANAR J. Recent system applications of short-pulse ultra-wideband (UWB) technology[J]. IEEE Transactions on Microwave Theory and Techniques, 2004, 52(9): 2087-2104. doi: 10.1109/TMTT.2004.834186 [20] GAKNE P V, O'KEEFE K. Tightly-coupled GNSS/vision using a sky-pointing camera for vehicle navigation in urban areas[J]. Sensors, 2018, 18(4): 1-32. doi: 10.1109/JSEN.2017.2782543 [21] QIN Tong, LI Pei-liang, SHEN Shao-jie. VINS-Mono: a robust and versatile monocular visual-inertial state estimator[J]. IEEE Transactions on Robotics, 2018, 34(4): 1004-1020. doi: 10.1109/TRO.2018.2853729 [22] SUCAN I A, MOLL M, KAVRAKI L E. The open motion planning library[J]. IEEE Robotic and Automation Magazine, 2012, 19(4): 72-82. doi: 10.1109/MRA.2012.2205651 [23] LIU T S, MERAT A, MAKHMALBAF M H M, et al. Comparison between optical flow and cross-correlation methods for extraction of velocity fields from particle images[J]. Experiments in Fluids, 2015, 56(8): 1-23. doi: 10.1007/s00348-015-2036-1 [24] HE Y N. Taylor expansion method for nonlinear evolution equations[J]. Applied Mathematics and Mechanics-English Edition, 2005, 26(4): 522-529. doi: 10.1007/BF02465392 [25] LUPTON T, SUKKARIEH S. Visual-inertial-aided navigation for high-dynamic motion in built environments without initial conditions[J]. IEEE Transactions on Robot, 2012, 28(1): 61-76. doi: 10.1109/TRO.2011.2170332 [26] LI Zeng-ke, WANG Ren, GAO Jing-xiang, et al. An approach to improve the positioning performance of GPS/INS/UWB integrated system with two-step filter[J]. Remote Sensing, 2018, 10(1): 1-14. http://adsabs.harvard.edu/abs/2018RemS...10...19L [27] LI Xin, WANG Yang. Research on a factor graph-based robust UWB positioning algorithm in NLOS environments[J]. Telecommunication Systems, 2021, 76(2): 207-217. doi: 10.1007/s11235-020-00709-2 [28] TOTH C K, JOZKOW G, KOPPANYI Z, et al. Positioning slow-moving platforms by UWB technology in GPS-challenged areas[J]. Journal of Surveying Engineering, 2017, 143(4): 1-9. [29] LIU Fei, LI Xin, WANG Jian, et al. An adaptive UWB/ MEMS-IMU complementary Kalman filter for indoor location in NLOS environment[J]. Remote Sensing, 2019, 11(22): 1-21. http://www.researchgate.net/publication/337189011_An_Adaptive_UWBMEMS-IMU_Complementary_Kalman_Filter_for_Indoor_Location_in_NLOS_Environment [30] ZHU Xiao-min, YI Jian-jun, CHENG Jun-yi, et al. Adapted error map based mobile robot UWB indoor positioning[J]. IEEE Transactions on Instrumentation and Measurement, 2020, 69(9): 1-15. doi: 10.1109/TIM.2020.3014465 [31] MINNE K, MACOIR N, ROSSEY J, et al. Experimental evaluation of UWB indoor positioning for indoor track cycling[J]. Sensors, 2019, 19(9): 1-17. doi: 10.1109/JSEN.2019.2897439 [32] CHEN Peng-zhan, KUANG Ye, CHEN Xiao-yue. A UWB/improved PDR integration algorithm applied to dynamic indoor positioning for pedestrians[J]. Sensors, 2017, 17(9): 1-20. doi: 10.1109/JSEN.2017.2685478 -








 点击查看大图
点击查看大图
计量
- 文章访问数: 1081
- HTML全文浏览量: 628
- PDF下载量: 146
- 被引次数: 0
