

Effect of fog weather warning system under cooperative vehicle infrastructure on vehicle operating eco-characteristics
-
摘要: 为探究车路协同技术对车辆运行生态特性的影响,基于驾驶模拟试验平台构建车路协同条件下的雾天预警系统,测试了驾驶人在浓雾条件下驾驶车辆的能耗排放特征;设计了空白对照组、可变情报板(DMS)预警组、人机交互界面(HMI)预警组以及DMS+HMI预警组4种试验场景,招募43名驾驶人开展驾驶模拟试验,通过对比不同预警方式作用下车辆总体和道路关键区段的能耗排放差异,明确不同预警系统对车辆运行生态特性的影响效用。分析结果表明:相对于空白组,3种车路协同雾天预警系统均能显著降低车辆整体能耗与排放,但是不同预警方式的作用效果并无明显差别;道路场景分为了预警前、预警区、渐变区和雾区4个关键区段,3种预警系统在预警区及渐变区均可有效降低车辆能耗及排放;HMI从发出预警信息后开始生效,DMS可在车辆进入预警区前产生效果,DMS+HMI在预警区的效果最为显著,但进入雾区后不能有效降低车辆能耗与排放。可见,虽然车路协同雾天预警系统整体可以提升车辆运行生态特性,但是单一增加预警强度或改变预警方式并不能有效保证整个雾天影响区域不同区段均具有节能减排效用,合理设置车路协同预警系统应综合考虑不同预警方式、预警信息触发点位及时机、驾驶人特性等因素的匹配关系。Abstract: To explore the effectiveness of cooperative vehicle infrastructure (CVI) technology on vehicle operating eco-characteristics, a fog weather warning system under CVI condition was built based on the driving simulation experiment platform. The fuel consumption and emission features of driving vehicles under the heavy fog weather environment were tested. Four testing scenes, including blank control group, group of warning by dynamic message sign (DMS), group of warning by human machine interface (HMI), and group of warning by DMS+HMI, were designed. A driving simulator experiment was carried out by recruiting 43 drivers. The effects of different warning methods on vehicle operating eco-characteristics were obtained by comparing the differences in vehicle fuel consumption and emissions as a whole and on key sections of the road. Analysis results show that compared with the blank group, the three types of fog weather warning systems under CVI can significantly reduce the overall fuel consumption and emissions of vehicles. However, the effects of the different warning methods are not significantly different. The road scene is divided into pre-warning, warning, gradient and fog zones, and the three warning systems can effectively reduce vehicle fuel consumption and emissions in the warning and gradient zones. The HMI takes effect as the warning message is issued, and the DMS is effective before the vehicle enters the warning zone. The DMS+HMI has the most significant effect in the warning zone, but it can not effectively reduce the vehicle fuel consumption and emissions after the vehicle enters the fog zone. Therefore, although fog weather warning system under CVI can improve the overall eco-characteristics of vehicle operation, it can not effectively guarantee energy savings and emission reduction effect of different sections in the fog-affected area by only increasing the warning intensity or changing the warning mode. The matching relationship among different warning modes, warning information trigger points and timing, driver characteristics and other factors should be comprehensively considered in a reasonable setting of the fog weather warning system under CVI. 4 tabs, 8 figs, 30 refs.
-

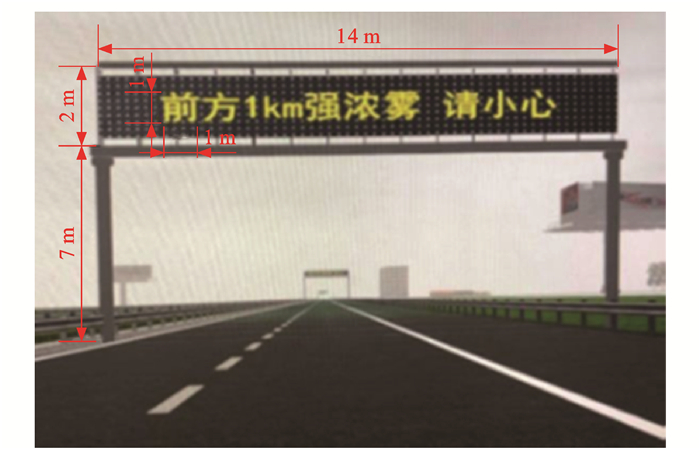
图 1 车路协同雾天预警系统
Figure 1. Fog weather warning system under cooperative vehicle infrastructure

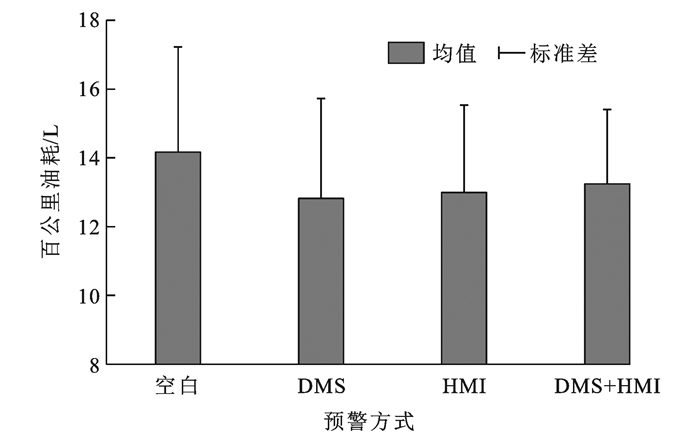
图 5 不同预警方式下车辆油耗均值与标准差
Figure 5. Mean values and standard deviations of vehicle fuel consumption corresponding to different warning types

图 6 不同预警方式下车辆油耗变化过程
Figure 6. Changing process of fuel consumption corresponding to different warning types

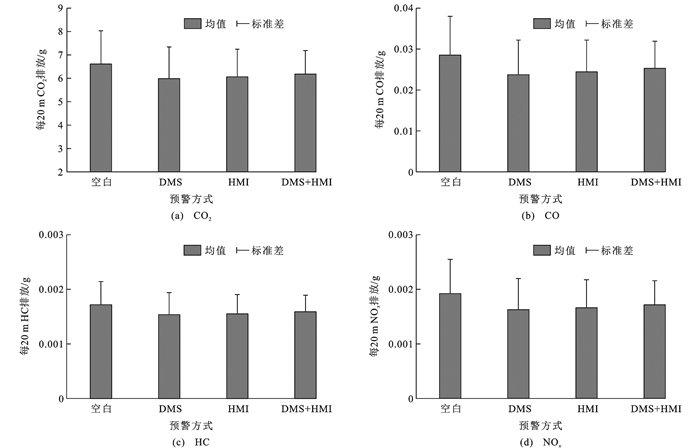
图 7 不同预警方式下车辆排放均值与标准差
Figure 7. Mean values and standard deviations of vehicle emissions corresponding to different warning types

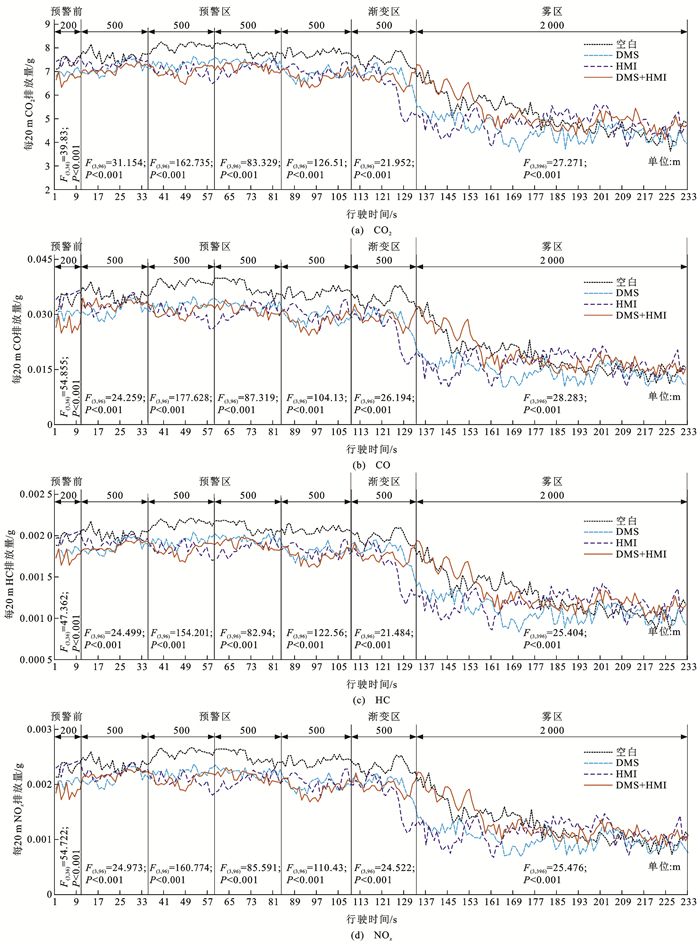
图 8 不同预警方式下车辆排放变化过程
Figure 8. Changing processes of vehicle emissions corresponding to different warning types
表 1 被试基本信息
Table 1. Basic information of participants
性别 统计值 年龄 驾龄/年 年平均驾驶里程/km 男性 均值 37.5 16.0 18 524.0 标准差 13.1 10.2 3 548.2 女性 均值 25.0 13.0 9 584.0 标准差 13.0 9.3 5 514.2  下载: 导出CSV
下载: 导出CSV
表 2 不同预警方式在各关键路段影响车辆油耗的差异性对比
Table 2. Difference comparison of vehicle fuel consumptions in key road segments corresponding to different warning types

表 3 不同预警方式下车辆排放均值方差分析结果
Table 3. Analysis results of variance for mean vehicle emissions corresponding to different warning types
排放物 CO2 CO HC NOx F(3, 936) 11.541 15.698 11.357 13.658 P < 0.001
下载: 导出CSV
表 4 不同预警方式在各关键路段影响车辆排放的差异性对比
Table 4. Difference comparison of vehicle emissions in key road segments corresponding to different warning types

-
[1] 王云鹏, 鲁光泉, 于海洋. 车路协同环境下的交通工程[J]. 中国工程科学, 2018, 20(2): 106-110. https://www.cnki.com.cn/Article/CJFDTOTAL-GCKX201802017.htmWANG Yun-peng, LU Guang-quan, YU Hai-yang. Traffic engineering considering cooperative infrastructure system[J]. Engineering Sciences, 2018, 20(2): 106-110. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GCKX201802017.htm [2] ELLIOTT D, KEEN W, MIAO L. Recent advances in connected and automated vehicles[J]. Journal of Traffic and Transportation Engineering (English Edition), 2019, 6(2): 109-131. doi: 10.1016/j.jtte.2018.09.005 [3] 鲁光泉, 宋阳. 车路协同环境下驾驶行为特性与交通安全综述[J]. 交通信息与安全, 2014, 32(5): 13-19. doi: 10.3963/j.issn.1674-4861.2014.05.003LU Guang-quan, SONG Yang. Driving behaviors and traffic safety under an environment of cooperative vehicle infrastructure systems[J]. Journal of Transport Information and Safety, 2014, 32(5): 13-19. (in Chinese) doi: 10.3963/j.issn.1674-4861.2014.05.003 [4] WU Y, ABDEL-ATY M, PARK J, et al. Effects of crash warning systems on rear-end crash avoidance behavior under fog conditions[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 481-492. doi: 10.1016/j.trc.2018.08.001 [5] ABDEL-ATY M, PANDE A, LEE C, et al. Crash risk assessment using intelligent transportation systems data and real-time intervention strategies to improve safety on freeways[J]. Journal of Intelligent Transportation Systems, 2007, 11(3): 107-120. doi: 10.1080/15472450701410395 [6] 刘锴, 贾洁, 刘超, 等. 车路协同环境下道路无信号交叉口防碰撞系统警示效果[J]. 中国公路学报, 2018, 31(4): 222-230. doi: 10.3969/j.issn.1001-7372.2018.04.026LIU Kai, JIA Jie, LIU Chao, et al. Warning effectiveness of vehicle-to-infrastructure cooperative crossing collision prevention system at no-signal controlled intersection[J]. China Journal of Highway and Transport, 2018, 31(4): 222-230. (in Chinese) doi: 10.3969/j.issn.1001-7372.2018.04.026 [7] JIA Dong-yao, NGODUY D. Enhanced cooperative car-following traffic model with the combination of V2V and V2I communication[J]. Transportation Research Part B: Methodological, 2016, 90: 172-191. doi: 10.1016/j.trb.2016.03.008 [8] SONGCHITRUKSA P, BIBEKA A, LIN L, et al. Incorporating driver behaviors into connected and automated vehicle simulation[R]. College Station: Texas A&M Transportation Institute, 2016. [9] 张荣辉, 游峰, 初鑫男, 等. 车-车协同下无人驾驶车辆的换道汇入控制方法[J]. 中国公路学报, 2018, 31(4): 180-191. doi: 10.3969/j.issn.1001-7372.2018.04.022ZHANG Rong-hui, YOU Feng, CHU Xin-nan, et al. Lane change merging control method for unmanned vehicle under V2V cooperative environment[J]. China Journal of Highway and Transport, 2018, 31(4): 180-191. (in Chinese) doi: 10.3969/j.issn.1001-7372.2018.04.022 [10] NIE Jian-qiang, ZHANG Jian, DING Wan-ting, et al. Decentralized cooperative lane-changing decision-making for connected autonomous vehicles[J]. IEEE Access, 2016, 4: 9413-9420. doi: 10.1109/ACCESS.2017.2649567 [11] ZHAO Xiao-hua, XU Wen-xiang, MA Jian-ming, et al. Effects of connected vehicle-based variable speed limit under different foggy conditions based on simulated driving[J]. Accident Analysis and Prevention, 2019, 128: 206-216. doi: 10.1016/j.aap.2019.04.020 [12] WANG Yin-song, YANG Xiao-guang, HUANG Luo-yi, et al. A phase-by-phase traffic control policy at isolated intersection based on cooperative vehicle-infrastructure system[J]. Procedia—Social and Behavioral Sciences, 2013, 96: 1987-1996. doi: 10.1016/j.sbspro.2013.08.224 [13] WU Yi-na, ABDEL-ATY M, PARK J, et al. Effects of real-time warning systems on driving under fog conditions using an empirically supported speed choice modeling framework[J]. Transportation Research Part C: Emerging Technologies, 2018, 86: 97-110. doi: 10.1016/j.trc.2017.10.025 [14] 马景伟. 高速公路长下坡交通安全预警及应急处置系统应用研究[D]. 西安: 长安大学, 2017.MA Jing-wei. Research on traffic safety early warning and emergency disposal system for long downhill of expressway[D]. Xi'an: Chang'an University, 2017. (in Chinese) [15] WANG Jian-qiang, NIU Hui-min. A distributed dynamic route guidance approach based on short-term forecasts in cooperative infrastructure-vehicle systems[J]. Transportation Research Part D: Transport and Environment, 2019, 66: 23-34. doi: 10.1016/j.trd.2018.05.005 [16] HU Xiang-wang, SUN Jian. Trajectory optimization of connected and autonomous vehicles at a multilane freeway merging area[J]. Transportation Research Part C: Emerging Technologies, 2019, 101: 111-125. doi: 10.1016/j.trc.2019.02.016 [17] ALIEDANI A, LOKE S W. Cooperative car parking using vehicle-to-vehicle communication: an agent-based analysis[J]. Computers, Environment and Urban Systems, 2019, 77: 101256. doi: 10.1016/j.compenvurbsys.2018.06.002 [18] 张赫, 郭文倩, 张健松, 等. 车路协同环境下多配送中心DVRP研究[J]. 武汉理工大学学报(交通科学与工程版), 2017, 41(6): 895-899. doi: 10.3963/j.issn.2095-3844.2017.06.001ZHANG He, GUO Wen-qian, ZHANG Jian-song, et al. Research on multi-depot dynamic vehicle routing problem under IntelliDriverSM[J]. Journal of Wuhan University of Technology (Transportation Science and Engineering), 2017, 41(6): 895-899. (in Chinese) doi: 10.3963/j.issn.2095-3844.2017.06.001 [19] 张婷, 赖平仲, 何琴飞, 等. 基于实时信息的城市配送车辆动态路径优化[J]. 系统工程, 2015, 33(7): 58-64. doi: 10.3969/j.issn.1001-2362.2015.07.040ZHANG Ting, LAI Ping-zhong, HE Qin-fei, et al. Optimization of dynamic vehicle routing of urban distribution based on real-time information[J]. Systems Engineering, 2015, 33(7): 58-64. (in Chinese) doi: 10.3969/j.issn.1001-2362.2015.07.040 [20] CHANG Xin, LI Han-jian, QIN Ling-qiao, et al. Evaluation of cooperative systems on driver behavior in heavy fog condition based on a driving simulator[J]. Accident Analysis and Prevention, 2019, 128: 197-205. doi: 10.1016/j.aap.2019.04.019 [21] ZHAO Wei-ming, NGODUY D, SHEPHERD S, et al. A platoon based cooperative eco-driving model for mixed automated and human-driven vehicles at a signalized intersection[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 802-821. doi: 10.1016/j.trc.2018.05.025 [22] PARK S, KIM J, LEE S, et al. Experimental analysis on control constraints for connected vehicles using VISSIM[J]. Transportation Research Procedia, 2017, 21: 269-280. doi: 10.1016/j.trpro.2017.03.097 [23] GUERIAU M, BILLOT R, FAOUZI N E, et al. How to assess the benefits of connected vehicles?A simulation framework for the design of cooperative traffic management strategies[J]. Transportation Research Part C: Emerging Technologies, 2016, 67: 266-279. doi: 10.1016/j.trc.2016.01.020 [24] 杨澜, 赵祥模, 吴国垣, 等. 智能网联汽车协同生态驾驶策略综述[J]. 交通运输工程学报, 2020, 20(5): 58-72.YANG Lan, ZHAO Xiang-mo, WU Guo-yuan, et al. Review on connected and automated vehicles based cooperative eco-driving strategies[J]. Journal of Traffic and Transportation Engineering, 2020, 20(5): 58-72. (in Chinese) [25] 付锐, 张雅丽, 袁伟. 生态驾驶研究现状及展望[J]. 中国公路学报, 2019, 32(3): 1-12.FU Rui, ZHANG Ya-li, YUAN Wei. Progress and prospect in research on eco-driving[J]. China Journal of Highway and Transport, 2019, 32(3): 1-12. (in Chinese) [26] ZHAO Xiao-hua, XU Wen-xiang, MA Jian-ming, et al. Effects of connected vehicle-based variable speed limit under different foggy conditions based on simulated driving[J]. Accident Analysis and Prevention, 2019, 128: 206-216. doi: 10.1016/j.aap.2019.04.020 [27] WU Yi-ping, ZHAO Xiao-hua, CHEN Chen, et al. Modeling the influence of chevron alignment sign on young male driver performance: a driving simulator study[J]. Accident Analysis and Prevention, 2016, 95: 479-486. doi: 10.1016/j.aap.2016.04.024 [28] YAO Xiang-lin, ZHAO Xiao-hua, LIU Hao, et al. An approach for evaluating the effectiveness of traffic guide signs at intersections[J]. Accident Analysis and Prevention, 2019, 129: 7-20. doi: 10.1016/j.aap.2019.05.003 [29] 伍毅平, 赵晓华, 荣建, 等. 基于驾驶模拟实验的生态驾驶行为节能减排潜力[J]. 北京工业大学学报, 2015, 41(8): 1212-1218. https://www.cnki.com.cn/Article/CJFDTOTAL-BJGD201508016.htmWU Yi-ping, ZHAO Xiao-hua, RONG Jian, et al. Potential of eco-driving in reducing fuel consumption and emissions based on a driving simulator[J]. Journal of Beijing University of Technology, 2015, 41(8): 1212-1218. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-BJGD201508016.htm [30] WU Yi-ping, ZHAO Xiao-hua, CHEN Chen, et al. Development and application of an eco-driving support platform based on internet+: case study in Beijing taxicabs[J]. Transportation Research Record, 2017, 2645: 57-66. doi: 10.3141/2645-07 -




 点击查看大图
点击查看大图

计量
- 文章访问数: 619
- HTML全文浏览量: 191
- PDF下载量: 78
- 被引次数: 0
