

Dynamics performance of new type of fully automatic track inspection vehicle
-
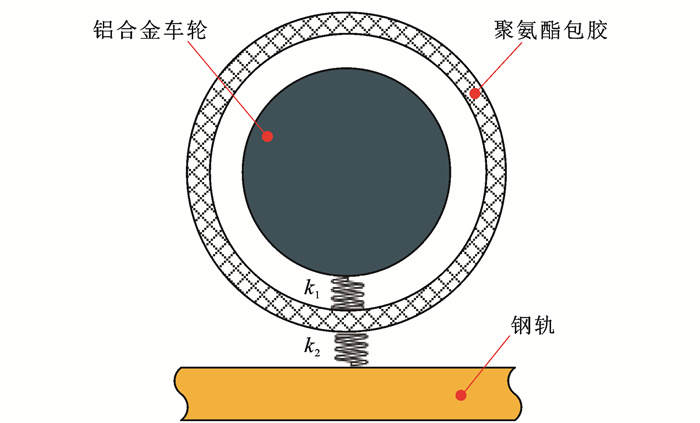
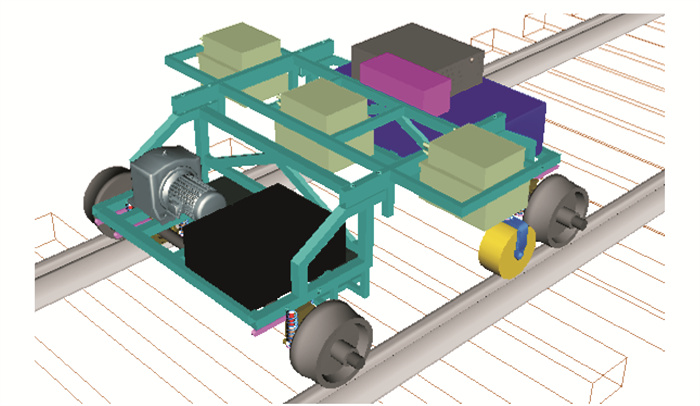
摘要: 为准确评估某新型全自动智能轨道巡检车的动力学性能,开展了轨道巡检车动力学数值仿真;轮轨接触采用非椭圆多点接触Kik-Piotrowski算法模拟,车辆系统建模过程中考虑悬挂力元非线性与轮轨接触几何非线性特性等因素,同时考虑车载设备参振影响;针对车轮踏面表面包裹高硬度聚氨酯的特殊结构,利用有限元软件ABAQUS建立了轮轨局部接触模型,采用Mooney-Rivlin橡胶模型模拟了聚氨酯特殊性质,计算了轮轨等效接触刚度;根据有限元计算结果修正了Kik-Piotrowski算法中的相关参数;基于Craig-Bampton模态综合法和多体动力学软件UM建立了车辆-轨道刚柔耦合模型;为验证仿真模型的准确性,开展了实车动力学试验;重点分析了直线和300 m小半径曲线,运行速度10~30 km·h-1工况下巡检车的振动响应。研究结果表明:车辆正常运行时,中间视觉模块垂向最大加速度大于左侧视觉模块垂向最大加速度,横向最大加速度小于左侧视觉模块横向最大加速度,车架最大加速度大于视觉模块最大加速度;车架中部易产生垂向弯曲变形,和视觉模块安装位置有胶垫减振有关;轨道巡检车在直线和300 m小半径区间运行性能整体良好,其中车辆在300 m小半径曲线段内30 km·h-1运行时,轮重减载率最大可达0.92,车架部位振动响应较大,为保证车载设备的安全性和避免车辆脱轨的风险,建议曲线段内检测速度控制在20 km·h-1左右。
-
关键词:
- 轨道检测 /
- 轨检车 /
- 车辆系统动力学 /
- 轮轨接触刚度 /
- Kik-Piotrowski算法
Abstract: Dynamics numerical simulations of a track inspection vehicle were performed to precisely evaluate the dynamics performance of a new type of fully automatic intelligent track inspection vehicle. The nonelliptical multipoint contact Kik-Piotrowski algorithm was adopted for the wheel-rail contact. During the vehicle system modeling process, the factors such as the nonlinear suspension force elements and geometric nonlinear characteristics of the wheel-rail contact were considered, and the influence of vehicle-mounted equipment vibration was analyzed. For the unique structure of the wheel tread surface wrapped with high-hardness polyurethane, the finite element software ABAQUS was used to establish the wheel-rail local contact model. The Mooney-Rivlin rubber model was utilized to simulate the distinct properties of polyurethane, and the wheel-rail equivalent contact stiffness was calculated. The relevant parameters in the Kik-Piotrowski algorithm were corrected based on the finite element calculation results. The coupled vehicle-track rigid-flexible model was established using the Craig-Bampton modal synthesis method and the multibody dynamics software UM. To verify the accuracy of the simulation model, the real vehicle dynamics test was carried out. The vibration responses of the inspection vehicle under the working conditions of the straight line and 300 m small-radius curve at running speed of 10-30 km·h-1 were analyzed. Research results show that when the vehicle runs normally, the vertical maximum acceleration of the middle-vision module exceeds that of the left-vision module. Moreover, the lateral maximum acceleration is lower than that of the left-vision module, and the maximum acceleration of the frame exceeds the value of the vision module. The middle part of the frame is prone to vertical bending and deformation because of the rubber cushion at the installation position of the vision module. The track inspection vehicle runs satisfactorily along a straight line and the 300 m small-radius section. When the vehicle runs at 30 km·h-1 on the 300 m small-radius curve section, the maximum wheel-load reduction rate can reach 0.92, and the vibration response of the frame is relatively large. The inspection speed in the curve section should be controlled at approximately 20 km·h-1 to ensure the safety of vehicle-mounted equipment and prevent the vehicle derailment. 5 tabs, 24 figs, 31 refs. -

图 7 车架前6阶自振频率与对应振型
Figure 7. First 6 natural frequencies and corresponding vibration modes of frame

图 11 车辆动力学测试与仿真结果对比
Figure 11. Comparison of vehicle dynamics test and simulation results

图 12 轮轨力测试与仿真结果对比
Figure 12. Comparison between wheel-rail force test and simulation results

图 13 直线工况下中间视觉模块加速度时域响应
Figure 13. Time domain responses of middle-vision module acceleration under straight line condition

图 14 直线工况下左侧视觉模块加速度时域响应
Figure 14. Time domain responses of left-visual module accelerations under straight line condition

图 15 直线工况下车架加速度时域响应
Figure 15. Time domain responses of frame accelerations under straight line condition

图 16 直线工况下车辆加速度指标统计结果
Figure 16. Statistical results of vehicle acceleration indexes under straight line condition

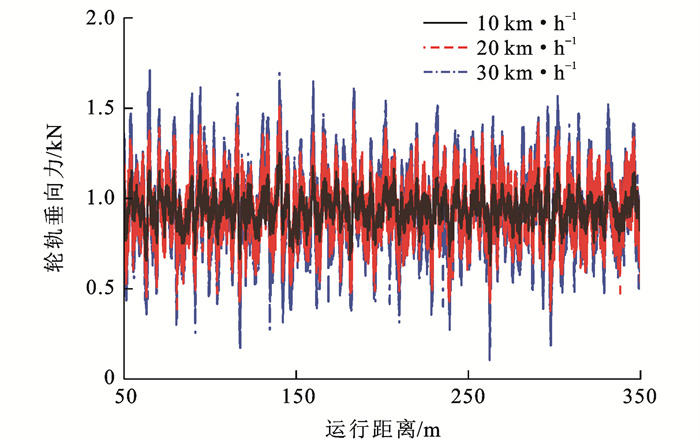
图 17 直线工况下轮轨垂向力时域响应
Figure 17. Time domain response of wheel-rail vertical force under straight line condition

图 18 直线工况下功率谱密度分析结果
Figure 18. Power spectral density analysis results under straight line condition

图 19 R300 m曲线工况下中间视觉模块加速度时域响应
Figure 19. Time domain responses of middle-vision module accelerations under R300 m curve condition

图 20 R300 m曲线工况下左侧视觉模块加速度时域响应
Figure 20. Time domain responses of left-vision module accelerations under R300 m curve condition

图 21 R300 m曲线工况下车架加速度时域响应
Figure 21. Time domain responses of frame accelerations under R300 m curve condition

图 22 R300 m曲线工况下车辆加速度指标统计结果
Figure 22. Statistical results of vehicle acceleration indexes under R300 m curve condition

图 23 R300 m曲线工况下轮轨垂向力时域响应
Figure 23. Time domain responses of wheel-rail vertical force under R300 m curve condition

图 24 R300 m曲线工况下功率谱密度分析结果
Figure 24. Power spectral density analysis results under R300 m curve condition
表 1 材料参数
Table 1. Material parameters
部件 弹性模量/Pa 泊松比 密度/(kg·m-3) 车轮(6061型铝合金) 6.89×1010 0.33 2 700 聚氨酯包胶 4.00×107 0.42 1 260 钢轨 2.10×1011 0.30 7 850  下载: 导出CSV
下载: 导出CSV
表 2 车辆系统部分参数
Table 2. Partial vehicle system parameters
参数 数值 备注 前车架质量/kg 24 中车架质量/kg 15.1 后车架质量/kg 18.1 轮对质量/kg 23.03 轴距/m 1.45 前车架承载质量/kg 96 电机(20 kg),2个电池(每个19 kg) 中车架承载质量/kg 60 3个视觉模块,每个20 kg 后车架承载质量/kg 50 电控柜(34 kg),工控机(16 kg)
下载: 导出CSV
表 3 有限元与UM动力学计算结果对比
Table 3. Comparison of finite element and UM dynamics calculation results
线路工况 有限元计算结果/mm UM计算结果/mm 相对误差/ % 一位轮对左侧轴箱 0.341 0.344 0.88 二位轮对左侧轴箱 0.324 0.303 6.48
下载: 导出CSV
表 4 轨检车仿真计算工况
Table 4. Simulation calculation conditions of track inspection vehicle
线路工况 车速/(km·h-1) 超高/mm 缓和曲线长度/m 直线 10、20、30 0 300 m小半径曲线 10、20、30 50 20
下载: 导出CSV
表 5 车辆安全性能指标统计结果
Table 5. Statistical results of vehicle safety performance indicators
速度/ (km·h-1) 直线运行工况 R300 m曲线运行工况 脱轨系数 轮重减载率 脱轨系数 轮重减载率 10 0.17 0.31 0.21 0.32 20 0.32 0.43 0.33 0.52 30 0.59 0.70 0.72 0.92
下载: 导出CSV
-
[1] 肖乾, 王丹红, 陈道云, 等. 高速列车轮轨激励作用机理及其影响综述[J]. 交通运输工程学报, 2021, 21(3): 93-109. https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202103009.htmXIAO Qian, WANG Dan-hong, CHEN Dao-yun, et al. Review on mechanism and influence of wheel-rail excitation of high-speed train[J]. Journal of Traffic and Transportation Engineering, 2021, 21(3): 93-109. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202103009.htm [2] 朱海燕, 袁遥, 肖乾, 等. 钢轨波磨研究进展[J]. 交通运输工程学报, 2021, 21(3): 110-133. https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202103010.htmZHU Hai-yan, YUAN Yao, XIAO Qian, et al. Research progress on rail corrugation[J]. Journal of Traffic and Transportation Engineering, 2021, 21(3): 110-133. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202103010.htm [3] 魏世斌, 刘伶萍, 赵延峰, 等. GJ-6型轨道检测系统[J]. 铁道建筑, 2011, 51(11): 98-101. https://www.cnki.com.cn/Article/CJFDTOTAL-TDJZ201111031.htmWEI Shi-bin, LIU Ling-ping, ZHAO Yan-feng, et al. GJ-6 track detection system[J]. Railway Engineering, 2011, 51(11): 98-101. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TDJZ201111031.htm [4] BOCCIOLONE M, CAPRIOLI A, CIGADA A, et al. A measurement system for quick rail inspection and effective track maintenance strategy[J]. Mechanical Systems and Signal Processing, 2007, 21(3): 1242-1254. doi: 10.1016/j.ymssp.2006.02.007 [5] GIBERT X, PATEL V M, CHELLAPPA R. Deep multitask learning for railway track inspection[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(1): 153-164. doi: 10.1109/TITS.2016.2568758 [6] TSAI H C, WANG C Y, HUANG N E, et al. Railway track inspection based on the vibration response to a scheduled train and the Hilbert-Huang transform[J]. Journal of Rail and Rapid Transit, 2015, DOI: 10.1177/0954409714527930. [7] 占栋, 于龙, 肖建, 等. 轨道检测中激光摄像式传感器标定方法研究[J]. 机械工程学报, 2013, 49(16): 39-47. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201316008.htmZHAN Dong, YU Long, XIAO Jian, et al. Calibration approach study for the laser camera transducer of track inspection[J]. Journal of Mechanical Engineering, 2013, 49(16): 39-47. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201316008.htm [8] 刘俊博, 黄雅平, 王胜春, 等. 基于机器视觉的多线路钢轨扣件缺损检测方法[J]. 中国铁道科学, 2019, 40(4): 27-35. doi: 10.3969/j.issn.1001-4632.2019.04.04LIU Jun-bo, HUANG Ya-ping, WANG Sheng-chun, et al. Rail fastener defect detection method for multi railways based on machine vision[J]. China Railway Science, 2019, 40(4): 27-35. (in Chinese) doi: 10.3969/j.issn.1001-4632.2019.04.04 [9] 董昱, 郭碧. 基于Hu不变矩特征的铁路轨道识别检测算法[J]. 铁道学报, 2018, 40(10): 64-70. doi: 10.3969/j.issn.1001-8360.2018.10.010DONG Yu, GUO Bi. Railway track detection algorithm based on Hu invariant moment feature[J]. Journal of the China Railway Society, 2018, 40(10): 64-70. (in Chinese) doi: 10.3969/j.issn.1001-8360.2018.10.010 [10] CHANG Chao, LING Liang, CHEN Shi-qian, et al. Dynamic performance evaluation of an inspection wagon for urban railway tracks[J]. Measurement, 2020, DOI: 10.1016/j.measurement.2020.108704. [11] 康洪军, 曾京, 张卫华, 等. 高速综合检测列车车体与车下设备耦合振动分析[J]. 北京交通大学学报, 2011, 35(6): 62-66. doi: 10.3969/j.issn.1673-0291.2011.06.012KANG Hong-jun, ZENG Jing, ZHANG Wei-hua, et al. Coupled vibration analysis between carbody and underframe of high-speed integrated test train[J]. Journal of Beijing Jiaotong University, 2011, 35(6): 62-66. (in Chinese) doi: 10.3969/j.issn.1673-0291.2011.06.012 [12] 鞠标, 朱洪涛, 徐鞠萍, 等. 基于轨检车振动问题的钢轨轮廓匹配方法研究[J]. 振动与冲击, 2017, 36(3): 65-69. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ201703011.htmJU Biao, ZHU Hong-tao, XU Ju-ping, et al. Rail contour matching method based on random vibrations of a rail inspection vehicle[J]. Journal of Vibration and Shock, 2017, 36(3): 65-69. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ201703011.htm [13] 肖乾, 方骏, 谭祖宾, 等. 铁路轨检车轴箱振动特性分析[J]. 铁道机车车辆, 2015, 35(2): 10-13. doi: 10.3969/j.issn.1008-7842.2015.02.03XIAO Qian, FANG Jun, TAN Zu-bin, et al. Axle-box vibration characteristic analysis for a railway track inspection vehicle[J]. Railway Locomotive and Car, 2015, 35(2): 10-13. (in Chinese) doi: 10.3969/j.issn.1008-7842.2015.02.03 [14] 张爱明. 二系空簧参数对广州地铁6号线轨检车动力学性能影响[J]. 铁道机车与动车, 2014(11): 20-24. doi: 10.3969/j.issn.1003-1820.2014.11.007ZHANG Ai-ming. The influence of the second series air spring parameters on the dynamic performance of Guangzhou Metro Line 6 rail inspection vehicle[J]. Railway Locomotive and Motor Car, 2014(11): 20-24. (in Chinese) doi: 10.3969/j.issn.1003-1820.2014.11.007 [15] 曾长操, 张建武, 李向华. 轨道巡检车侧向动力学建模与仿真[J]. 上海交通大学学报, 2005, 39(9): 1461-1464. doi: 10.3321/j.issn:1006-2467.2005.09.018ZENG Chang-cao, ZHANG Jian-wu, LI Xiang-hua. The lateral dynamics modeling and simulation for maglev track inspection vehicle[J]. Journal of Shanghai Jiaotong University, 2005, 39(9): 1461-1464. (in Chinese) doi: 10.3321/j.issn:1006-2467.2005.09.018 [16] 刘兴初, 靳永军, 张建武. 磁浮轨检车随机振动时域仿真[J]. 江苏大学学报(自然科学版), 2006, 27(5): 422-425. https://www.cnki.com.cn/Article/CJFDTOTAL-JSLG200605010.htmLIU Xing-chu, JIN Yong-jun, ZHANG Jian-wu. Time domain smiulation of stochastic vibration for maglev track inspection vehicle[J]. Journal of Jiangsu University (Natural Science Edition), 2006, 27(5): 422-425. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSLG200605010.htm [17] 孙宇. 轮轨非Hertz接触方法及其在高速铁路轮轨动力相互作用中的应用研究[D]. 成都: 西南交通大学, 2018.SUN Yu. Wheel-rail non-hertzian contact method and its application in the study of wheel-rail dynamic interaction on high-speed railway[D]. Chengdu: Southwest Jiaotong University, 2018. (in Chinese) [18] LEBLEBICI A S, TVRKAY S. Influence of wheel-rail contact stiffness on the H2 controlled active suspension design[J]. IFAC, 2017, DOI: 10.1016/j.ifacol.2017.08.710. [19] 郑明军, 王文静, 陈政南, 等. 橡胶Mooney-Rivlin模型力学性能常数的确定[J]. 橡胶工业, 2003, 50(8): 462-465. doi: 10.3969/j.issn.1000-890X.2003.08.003ZHENG Ming-jun, WANG Wen-jing, CHEN Zheng-nan, et al. Determination for mechanical constants of rubber Mooney-Rivlin model[J]. China Rubber Industry, 2003, 50(8): 462-465. (in Chinese) doi: 10.3969/j.issn.1000-890X.2003.08.003 [20] LIU I S. A note on the Mooney-Rivlin material model[J]. Continuum Mechanics and Thermodynamics, 2012, 24(4/5/6): 583-590. [21] KIM B, LEE S B, LEE J, et al. A comparison among Neo-Hookean model, Mooney-Rivlin model, and Ogden model for chloroprene rubber[J]. International Journal of Precision Engineering and Manufacturing, 2012, 13(5): 759-764. doi: 10.1007/s12541-012-0099-y [22] SACCOMANDI G, VERGORI L. Generalised Mooney-Rivlin models for brain tissue: a theoretical perspective[J]. International Journal of Non-Linear Mechanics, 2019, DOI: 10.1016/j.ijnonlinmec.2018.09.008. [23] PIOTROWSKI J, KIK W. A simplified model of wheel-rail contact mechanics for non-Hertzian problems and its application in rail vehicle dynamic simulations[J]. Vehicle System Dynamics, 2008, 46(1/2): 27-48. [24] SUN Yu, ZHAI Wan-ming, GUO Yu. A robust non-Hertzian contact method for wheel-rail normal contact analysis[J]. Vehicle System Dynamics, 2018, 56(12): 1899-1921. doi: 10.1080/00423114.2018.1439587 [25] 孙宇, 朱胜阳, 翟婉明. 车轮踏面凹形磨耗对轮轨相互作用的影响研究[J]. 机械工程学报, 2018, 54(4): 109-116. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201804018.htmSUN Yu, ZHU Sheng-yang, ZHAI Wan-ming. Influence of tread hollow worn wheel on wheel/rail interaction[J]. Journal of Mechanical Engineering, 2018, 54(4): 109-116. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201804018.htm [26] SUN Yu, LING Liang. An optimal tangential contact model for wheel-rail non-Hertzian contact analysis and its application in railway vehicle dynamics simulation[J]. Vehicle System Dynamics, 2021, DOI: 10.1080/00423114.2021.1942078. [27] SUN Yu, ZHAI Wan-ming, YE Yun-guang, et al. A simplified model for solving wheel-rail non-Hertzian normal contact problem under the influence of yaw angle[J]. International Journal of Mechanical Sciences, 2020, DOI: 10.1016/j.ijmecsci.2020.105554. [28] KALKER J J. A fast algorithm for the simplified theory of rolling contact[J]. Vehicle System Dynamics, 1982, 11(1): 1-13. doi: 10.1080/00423118208968684 [29] ZHAI Wan-ming, WANG Kai-yun, CAI Cheng-biao. Fundamentals of vehicle-track coupled dynamics[J]. Vehicle System Dynamics, 2009, 47(11): 1349-1376. doi: 10.1080/00423110802621561 [30] XU Lei, ZHAI Wan-ming, GAO Jian-min. A probabilistic model for track random irregularities in vehicle-track coupled dynamics[J]. Applied Mathematical Modelling, 2017, 51: 145-158. doi: 10.1016/j.apm.2017.06.027 [31] YANG Jian-jin, ZHU Sheng-yang, ZHAI Wan-ming. Modeling slab track for vehicle-track-coupled dynamics analysis using spline function method[J]. International Journal of Structural Stability and Dynamics, 2020, 20(2): 2050026. doi: 10.1142/S0219455420500261 -





















 点击查看大图
点击查看大图

计量
- 文章访问数: 989
- HTML全文浏览量: 532
- PDF下载量: 64
- 被引次数: 0
