

Vehicle-following model in mixed traffic flow considering interaction potential of multiple front vehicles
-
摘要: 基于自动驾驶车辆(AV)和常规人驾车辆(RV)混合行驶的情况,在全速度差(FVD)模型的基础上考虑了多前车和一辆后车的车头间距、速度、速度差、加速度差等因素,建立了适用于AV和RV 2种车辆的混行车辆跟驰模型;引入分子动力学理论定量化表达了周围车辆对主体车辆的影响程度;利用RV和AV混行场景跟车数据,以模型拟合精度最高为目标,对所有参数遍历寻优,进行标定;对比分析了混行车辆跟驰模型和FVD模型控制下交通流的稳定性,解析了车速对交通流稳定性的影响;设计了数值仿真试验,模拟了城市道路和高速公路2种常见场景,分析了混行车辆跟驰模型的拟合精度。研究结果表明:考虑周围多车信息有利于提高交通流的稳定性;车辆速度越低交通流稳定性越差;考虑多车信息的分子动力学混行车辆跟驰模型可以提前获得整个车队的运行趋势,更好地模拟AV的动力学特征;与FVD模型相比,在城市道路条件下混行车辆跟驰模型中的RV平均最大误差与平均误差分别减小了0.18 m·s-1和13.12%,拟合精度提高了4.47%;与PATH实验室的ACC模型相比,在高速公路条件下混行车辆跟驰模型中的AV平均最大误差和平均误差分别减小了7.78%和26.79%,拟合精度提高了1.21%。可见,该模型可用于混行环境下AV的跟驰控制与队列控制,以及AV和RV的跟驰仿真。Abstract: The mixed traffic flow consisting of automated vehicle (AV) and regular vehicle (RV) was analyzed. Based on the full velocity difference (FVD) model, a vehicle-following model for two types of vehicles (AV and RV) in mixed traffic flow was constructed by considering the factors of the headway, velocity, velocity difference and acceleration difference of multiple front vehicles and one rear vehicle. By introducing the molecular dynamics, the model also quantitatively expressed the influence degree of a surrounding vehicle on the host vehicle. According to the data collected from the vehicle-following field test mixed with AVs and RVs, the model parameters were globally optimized to obtain the highest accuracy. The stability of traffic flow for the vehicle-following model and FVD model was compared, and the influence of velocity on the stability of traffic flow was analyzed. Numerical simulation was designed to simulate the common traffic scenarios including urban areas and expressways, and the accuracy of the proposed model was analyzed. Simulation results indicate that the stability of traffic flow improves by considering the information from surrounding multiple vehicles, and the small velocity can reduce the stability. The proposed model can respond to the behaviours of the whole platoon in advance and simulate the dynamics characteristics of AVs better. In urban areas, compared with the FVD model, the average maximum error and average error of RV for the proposed model reduce by 0.18 m · s-1 and 13.12%, respectively, and the accuracy improves by 4.47%. In expressways, compared with the adaptive cruise control (ACC) model provided by PATH Laboratory, the average maximum error and average error of AV for the proposed model reduce by 7.78% and 26.79%, respectively, and the accuracy improves by 1.12%. In addition to providing model basis for AV-following control and queue control in mixed traffic flow, the proposed model can be utilized in vehicle-following behavior simulation for AV and RV. 1 tab, 7 figs, 38 refs.
-

图 5 车辆在不同速度下的开环幅相特性
Figure 5. Open loop amplitude-phase characteristics of vehicles at different velocities
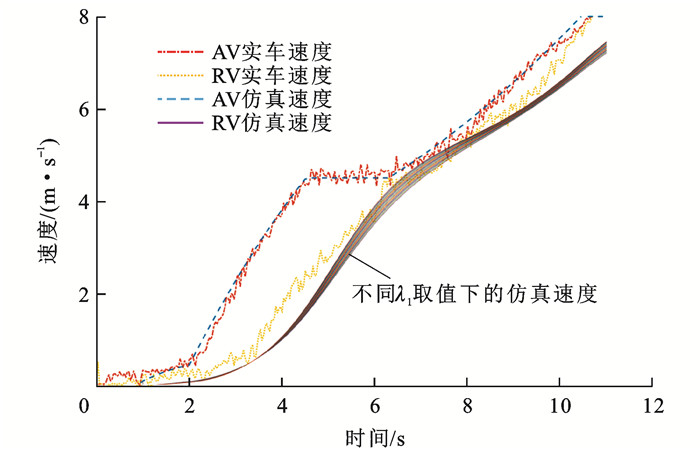
表 1 不同λ1参数对应的拟合结果分析
Table 1. Analysis of fitting results at different λ1
λ1 0.12 0.13 0.14 0.15 0.16 平均最大误差/(m·s-1) 0.826 4 0.812 8 0.822 8 0.798 7 0.802 5 平均误差/(m·s-1) -0.181 5 -0.181 1 -0.188 0 -0.189 7 -0.202 2 均方误差/(m·s-1) 0.100 7 0.097 4 0.100 2 0.089 0 0.103 4 平均绝对误差/(m·s-1) 0.242 6 0.238 0 0.248 1 0.244 8 0.248 8 决定系数 0.988 570 0.991 012 0.989 011 0.989 892 0.987 921 差异指标 0.621 5 0.636 4 0.619 7 0.623 2 0.630 3 组间均方 0.244 2 0.240 7 0.243 1 0.247 7 0.251 1 组间均方临界值 3.877 4 3.877 4 3.877 4 3.877 4 3.877 4  下载: 导出CSV
下载: 导出CSV
-
[1] 王殿海, 金盛. 车辆跟驰行为建模的回顾与展望[J]. 中国公路学报, 2012, 25(1): 115-127. doi: 10.3969/j.issn.1001-7372.2012.01.018WANG Dian-hai, JIN Sheng. Review and outlook of modeling of car following behavior[J]. China Journal of Highway and Transport, 2012, 25(1): 115-127. (in Chinese) doi: 10.3969/j.issn.1001-7372.2012.01.018 [2] TOLEDO T. Driving behaviour: model and challenges[J]. Transport Reviews, 2007, 27(1): 65-84. doi: 10.1080/01441640600823940 [3] CHAI Chen, WONG Y D. Micro-simulation of vehicle conflicts involving right-turn vehicles at signalized intersections based on cellular automata[J]. Accident Analysis and Prevention, 2014, 63: 94-103. doi: 10.1016/j.aap.2013.10.023 [4] 李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1): 1-14. doi: 10.3969/j.issn.1674-8484.2017.01.001LI Ke-qiang, DAI Yi-fan, LI Sheng-bo, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. Journal of Automotive Safety and Energy, 2017, 8(1): 1-14. (in Chinese) doi: 10.3969/j.issn.1674-8484.2017.01.001 [5] 王祺, 谢娜, 侯德藻, 等. 自适应巡航及协同式巡航对交通流的影响分析[J]. 中国公路学报, 2019, 32(6): 188-197, 205. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906020.htmWANG Qi, XIE Na, HOU De-zao, et al. Effects of adaptive cruise control and cooperative adaptive cruise control on traffic flow[J]. China Journal of Highway and Transport, 2019, 32(6): 188-197, 205. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906020.htm [6] BANSAL P, KOCKELMAN K M. Forecasting Americans' long-term adoption of connected and autonomous vehicle technologies[J]. Transportation Research Part A: Policyand Practice, 2017, 95(1): 49-63. https://www.sciencedirect.com/science/article/pii/S0965856415300628 [7] XIE Dong-fan, ZHAO Xiao-mei, HE Zheng-bing. Heterogeneous traffic mixing regular and connected vehicles: modeling and stabilization[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(6): 2060-2071. doi: 10.1109/TITS.2018.2857465 [8] NGODUY D. Analytical studies on the instabilities of heterogeneous intelligent traffic flow[J]. Communications in Nonlinear Science and Numerical Simulation, 2013, 18(10): 2699-2706. doi: 10.1016/j.cnsns.2013.02.018 [9] ZHU Wen-xing, ZHANG H M. Analysis of mixed traffic flow with human-driving and autonomous cars based on car-following model[J]. Physica A: Statistical Mechanics and its Applications, 2018, 496: 274-285. doi: 10.1016/j.physa.2017.12.103 [10] ZONG Fang, WANG Meng, TANG Ming, et al. An improved intelligent driver model considering the information of multiple front and rear vehicles[J]. IEEE Access, 2021, 9: 66241-66252 doi: 10.1109/ACCESS.2021.3072058 [11] 唐亮, 孙棣华, 彭光含. 基于多车信息的交通流跟驰模型与数值仿真[J]. 系统仿真学报, 2012, 24(2): 293-296. https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ201202008.htmTANG Liang, SUN Di-hua, PENG Guang-han. Car-following model of traffic flow and numerical simulation based on multiple information of preceding cars[J]. Journal of System Simulation, 2012, 24(2): 293-296. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ201202008.htm [12] TANG Tie-qiao, SHI Wei-fang, SHANG Hua-yan, et al. A new car-following model with consideration of inter-vehicle communication[J]. Nonlinear Dynamics, 2014, 76(4): 2017-2023. doi: 10.1007/s11071-014-1265-9 [13] OU Hui, TANG Tie-qiao. An extended two-lane car-following model accounting for inter-vehicle communication[J]. Physica A: Statistical Mechanics and its Applications, 2018, 495: 260-268. doi: 10.1016/j.physa.2017.12.100 [14] LI Yong-fu, SUN Di-hua, LIU Wei-ning, et al. Modeling and simulation for microscopic traffic flow based on multiple headway, velocity and acceleration difference[J]. Nonlinear Dynamics, 2011, 66(1/2): 15-28. doi: 10.1007/s11071-010-9907-z [15] 华雪东, 王炜, 王昊. 考虑车与车互联通讯技术的交通流跟驰模型[J]. 物理学报, 2016, 65(1): 52-63. doi: 10.3969/j.issn.1672-7940.2016.01.009HUA Xue-dong, WANG Wei, WANG Hao. A car-following model with the consideration of vehicle-to-vehicle communication technology[J]. Acta Physica Sinica, 2016, 65(1): 52-63. (in Chinese) doi: 10.3969/j.issn.1672-7940.2016.01.009 [16] 曲大义, 邴其春, 贾彦峰, 等. 基于分子动力学的车辆换道交互行为特性及其模型[J]. 交通运输系统工程与信息, 2019, 19(3): 68-74. https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201903011.htmQU Da-yi, BING Qi-chun, JIA Yan-feng, et al. Molecular dynamics characteristics and models of vehicle lane changing interaction behavior[J]. Journal of Transportation Systems Engineering and Information Technology, 2019, 19(3): 68-74. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201903011.htm [17] 李娟, 曲大义, 刘聪, 等. 基于分子动力学的跟驰特性及其模型[J]. 公路交通科技, 2018, 35(3): 126-131. https://www.cnki.com.cn/Article/CJFDTOTAL-GLJK201803017.htmLI Juan, QU Da-yi, LIU Cong, et al. Car-following characteristics and its models based on molecular dynamics[J]. Journal of Highway and Transportation Research and Development, 2018, 35(3): 126-131. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GLJK201803017.htm [18] MILANÉS V, SHLADOVER S E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data[J]. Transportation Research Part C: Emerging Technologies, 2014, 48(11): 285-300. https://www.sciencedirect.com/science/article/abs/pii/S0968090X14002447 [19] 秦严严, 王昊, 王炜, 等. 混有CACC车辆和ACC车辆的异质交通流基本图模型[J]. 中国公路学报, 2017, 30(10): 127-136. doi: 10.3969/j.issn.1001-7372.2017.10.016QIN Yan-yan, WANG Hao, WANG Wei, et al. Fundamental diagram model of heterogeneous traffic flow mixed with cooperative adaptive cruise control vehicles and adaptive cruise control vehicles[J]. China Journal of Highway and Transport, 2017, 30(10): 127-136. (in Chinese) doi: 10.3969/j.issn.1001-7372.2017.10.016 [20] YAO Zhi-hong, HU Rong, WANG Yi, et al. Stability analysis and the fundamental diagram for mixed connected automated and human-driven vehicles[J]. Physica A: Statistical Mechanics and its Applications, 2019, 533: 121931. doi: 10.1016/j.physa.2019.121931 [21] HU Rong, YAO Zhi-hong, JIANG Yang-sheng, et al. Stability and safety evaluation of mixed traffic flow with connected automated vehicles on expressways[J]. Journal of Safety Research, 2020, 75: 262-274. doi: 10.1016/j.jsr.2020.09.012 [22] ZHAO Xiao-mei, GAO Zi-you. A new car-following model: full velocity and acceleration difference model[J]. The European Physical Journal B: Condensed Matter and Complex Systems, 2005, 47(1): 145-150. doi: 10.1140/epjb/e2005-00304-3 [23] PENG Guang-han. Stabilisation analysis of multiple car- following model in traffic flow[J]. Chinese Physics B, 2010, 19(5): 434-441. doi: 10.1287/opre.7.1.86 [24] 李林恒, 甘婧, 曲栩, 等. 智能网联环境下基于安全势场理论的车辆跟驰模型[J]. 中国公路学报, 2019, 32(12): 76-87. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201912009.htmLI Lin-heng, GAN Jing, QU Xu, et al. Car-following model based on safety potential field theory under connected and automated vehicle environment[J]. China Journal of Highway and Transport, 2019, 32(12): 76-87. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201912009.htm [25] 杨凯, 龙佳, 马雪燕, 等. 移动机器人改进人工势场的路径规划方法研究[J]. 现代电子技术, 2020, 43(7): 141-145. https://www.cnki.com.cn/Article/CJFDTOTAL-XDDJ202007035.htmYANG Kai, LONG Jia, MA Xue-yan, et al. Research on mobile robot path planning method based on improved artificial potential field[J]. Modern Electronics Technique, 2020, 43(7): 141-145. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XDDJ202007035.htm [26] 王建强, 吴剑, 李洋. 基于人-车-路协同的行车风险场概念、原理及建模[J]. 中国公路学报, 2016, 29(1): 105-114. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201601015.htmWANG Jian-qiang, WU Jian, LI Yang. Concept, principle and modeling of driving risk field based on driver-vehicle-road interaction[J]. China Journal of Highway and Transport, 2016, 29(1): 105-114. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201601015.htm [27] 蔡晓禹, 蔡明, 张有节, 等. 基于车联网环境的驾驶员反应时间研究[J]. 计算机应用, 2017, 37(S2): 270-273. https://www.cnki.com.cn/Article/CJFDTOTAL-JSJY2017S2065.htmCAI Xiao-yu, CAI Ming, ZHANG You-jie, et al. Research on driver reaction time in Internet of vehicles environment[J]. Journal of Computer Applications, 2017, 37(S2): 270-273. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSJY2017S2065.htm [28] JIANG Rui, WU Qing-song, ZHU Zuan-jian. Full velocity difference model for a car-following theory[J]. Physical Review E, 2001, 64(1): 017101. doi: 10.1103/PhysRevE.64.017101 [29] 孙棣华, 张建厂, 赵敏, 等. 考虑后视效应和速度差信息的跟驰模型[J]. 四川大学学报(自然科学版), 2012, 49(1): 115-120. https://www.cnki.com.cn/Article/CJFDTOTAL-SCDX201201021.htmSUN Di-hua, ZHANG Jian-chang, ZHAO Min, et al. Effect of backward looking and velocity difference in an extended car following model[J]. Journal of Sichuan University (Natural Science Edition), 2012, 49(1): 115-120. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-SCDX201201021.htm [30] 陈秀锋. 基于分子动力学的车辆运行安全特性研究[D]. 长春: 吉林大学, 2013.CHEN Xiu-feng. A study on vehicle operating safety characteristics based on molecular dynamics[D]. Changchun: Jilin University, 2013. (in Chinese) [31] 曲大义, 杨建, 陈秀锋, 等. 车辆跟驰的分子动力学特性及其模型[J]. 吉林大学学报(工学版), 2012, 42(5): 1198-1202. https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY201205022.htmQU Da-yi, YANG Jian, CHEN Xiu-feng, et al. Molecular kinetics behavior of car-following and its model[J]. Journal of Jilin University(Engineering and Technology Edition), 2012, 42(5): 1198-1202. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY201205022.htm [32] 李萌萌. 微通道气体流动的分子动力学模拟[D]. 西安: 西安电子科技大学, 2005.LI Meng-meng. Molecule dynamics simulation on gas flow in microchannels[D]. Xi'an: Xidian University, 2005. (in Chinese) [33] 石蕊. 信号控制交叉口行车场建立及车辆通行行为优化[D]. 长春: 吉林大学, 2021.SHI Rui. The construction of risk field and optimization of driving behaviors for signalized intersections[D]. Changchun: Jilin University, 2021. (in Chinese) [34] 曲昭伟, 潘昭天, 陈永恒, 等. 基于最优速度模型的改进安全距离跟驰模型[J]. 吉林大学学报(工学版), 2019, 49(4): 1092-1099. https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY201904009.htmQU Shao-wei, PAN Shao-tian, CHEN Yong-heng, et al. Car-following model with improving safety distance based on optimal velocity model[J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(4): 1092-1099. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY201904009.htm [35] HELBING D, TILCH B. Generalized force model of traffic dynamics[J]. Physical Review E, 1998, 58(1): 133-138. doi: 10.1103/PhysRevE.58.133 [36] 秦严严, 王昊, 王炜, 等. 自适应巡航控制车辆跟驰模型综述[J]. 交通运输工程学报, 2017, 17(3): 121-130. http://transport.chd.edu.cn/article/id/201703013QIN Yan-yan, WANG Hao, WANG Wei, et al. Review of car-following models of adaptive cruise control[J]. Journal of Traffic and Transportation Engineering, 2017, 17(3): 121-130. (in Chinese) http://transport.chd.edu.cn/article/id/201703013 [37] SHLADOVER S E, SU Dong-yan, LU Xiao-yun. Impacts of cooperative adaptive cruise control on freeway traffic flow[J]. Transportation Research Record, 2012, 2324: 63-70. http://sage.cnpereading.com/paragraph/article/?doi=10.3141/2324-08 [38] VANDERWERF J, SHLADOVER S, KOURJANSKAIA N, et al. Modeling effects of driver control assistance systems on traffic[J]. Transportation Research Record. 2001, 1748: 167-174. https://www.hindawi.com/journals/jat/2019/2162568/ -




 点击查看大图
点击查看大图

图(7) / 表(1)
计量
- 文章访问数: 1155
- HTML全文浏览量: 375
- PDF下载量: 231
- 被引次数: 0
