

Centralized ramp confluence cooperative control method with special connected and automated vehicle priority
-
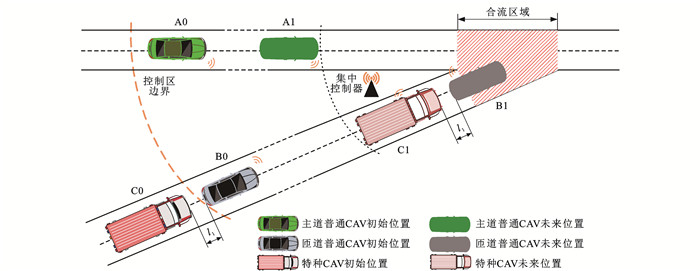
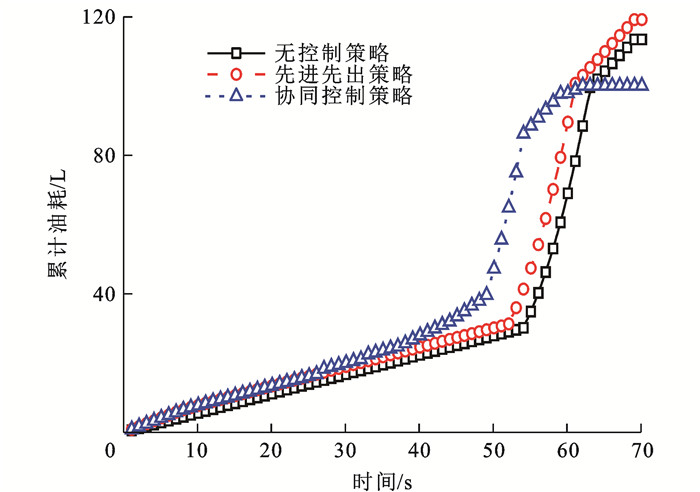
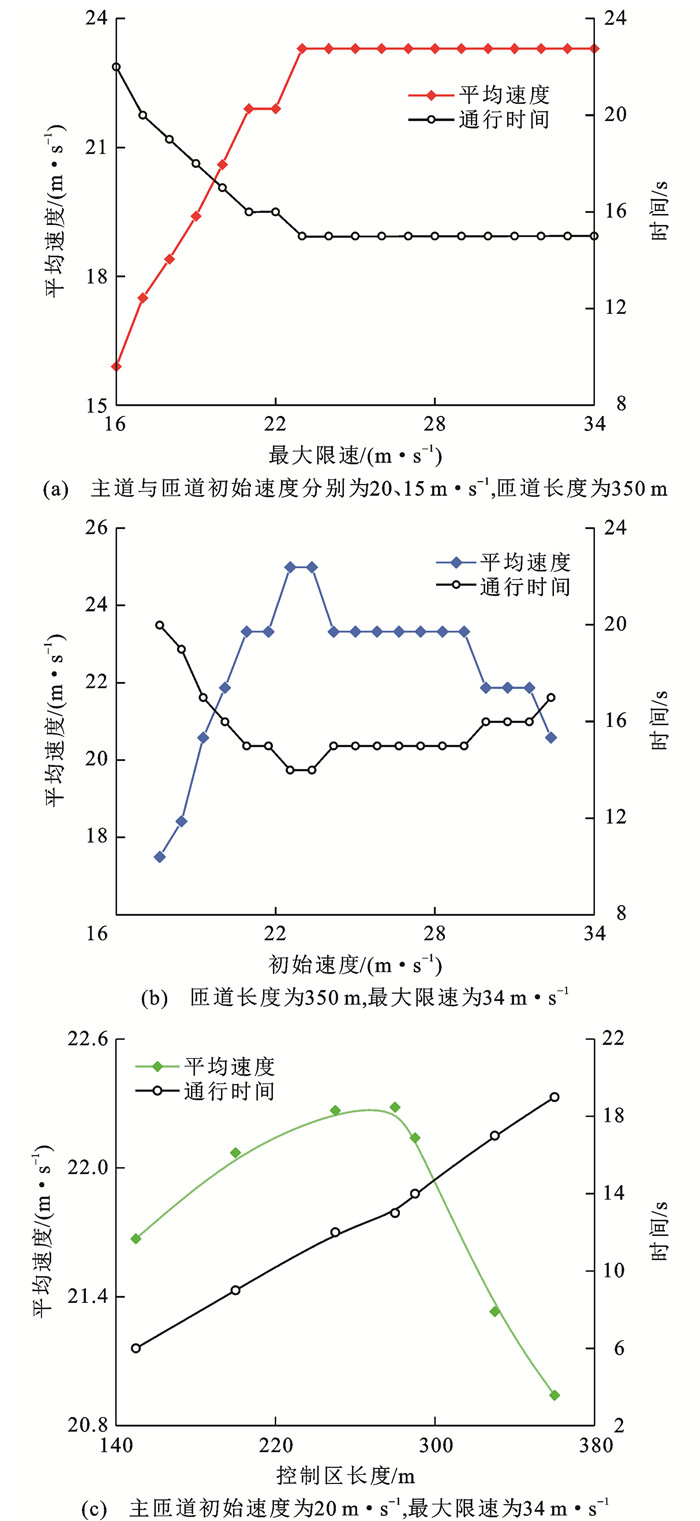
摘要: 为保障无人驾驶环境下特种车辆在典型Y型匝道合流区快速平稳通过,研究了全网联自动驾驶车辆(CAV)集中控制场景中考虑特种车辆优先通行的协同控制方法;通过博弈确定了控制区内合流序列排布,考虑特种CAV任务优先属性与车型特征,分别设计了与加速度关联的特种CAV车道优先属性、与时间关联的车种优先属性和与加速度变化率关联的车型稳定优先属性,并在成本函数中进行联合表征;将特种CAV参与的合流序列排布转化为最优序列集求解,应用二人合作博弈收益矩阵法确定了最优合流序列;依据排序结果,应用庞特里亚金最大值原理求解了车辆轨迹控制,在最小策略成本下求得纵向轨迹最优解析解,实现了考虑特种CAV优先通行的协同控制;应用Python开发语言在实施算例中仿真验证了考虑特种CAV优先通行的协同控制方法,并与无控制策略和先进先出策略进行油耗与通行时间对比。研究结果表明:应用协同控制方法在有效保障特种CAV优先通行的基础上,有86%的车辆在合流期间可以保证以最大速度平稳通过合流区域;相比于无控制策略和先进先出策略,在累计油耗方面分别降低了11.8%与16.1%,车队通过合流区域的总时长领先2类传统合流策略各3 s;最大限速、初始速度和控制区长度均对应存在使特种CAV快速通行的阈值,可为合流区域设计提供参考。Abstract: To ensure that the special vehicles pass quickly and smoothly in the confluence area of typical Y-type ramps in unmanned driving environment, a cooperative control method was studied by considering the priority to special vehicles for the centralized control scenario of fully connected and automated vehicle (CAV). The confluence sequence arrangement in the controlled area was determined using games. By considering the task priority attribute of special CAV and characteristics of vehicles, attributes related to the acceleration-associated lane priority of special CAV, the time-associated vehicle type priority, and the acceleration change rate-associated vehicle stability priority were designed separately, and a joint characterization of these attributes was performed using the cost function. The confluence sequence arrangement with the special CAV was transformed into an optimal sequence set solution, and the optimal confluence sequence was determined using the income matrix method of two-person cooperative game. Based on the sequencing results, the Pontryagin's maximum principle was applied to determine the vehicle trajectory control, and the optimal analytical solution for the longitudinal trajectory was obtained when the cost was at the minimum, to achieve the cooperative control while prioritizing the special CAV. Through the case calculation, Python was used to simulate and verify the cooperative control method giving priority to the special CAV, and the respective fuel consumptions and transit times with no control strategy and using the first-in-first-out strategy were compared. Research results show that 86% of vehicles can travel at the maximum speed to smoothly pass through the confluence area, and the cooperative control method can effectively guarantee the priority of special CAV. Compared with cases without control strategy and under the first-in-first-out strategy, the cumulative fuel consumptions under the cooperative control decrease by 11.8% and 16.1%, respectively, and the overall fleet passing time is shorter than those obtained with the two traditional confluence strategies. There are corresponding thresholds for the maximum speed limit, initial speed, and controlled area length to enable the special CAV to pass quickly. These values can serve as references in the confluence area design. 3 tabs, 7 figs, 31 refs.
-
表 1 考虑特种CAV的博弈收益矩阵
Table 1. Game income matrix considering special CAV
i1和i2 车辆i2的策略 前车 后车 车辆i1的策略 前车 +∞ U(si1f, si2r) 后车 U(si1r, si2f) +∞  下载: 导出CSV
下载: 导出CSV
表 2 仿真试验参数
Table 2. Simulation experimental parameters
参数 数值 主匝道运行车道数 1 主道车辆数 9 匝道车辆数 6 主道车辆起始速度vm/(m·s-1) 20 匝道车辆起始速度vs/(m·s-1) 15 车辆最大速度vmax/(m·s-1) 33 车辆最大加速度amax/(m·s-2) 2 车辆最大减速度amin/(m·s-2) 2 控制范围R/m 350 极限紧随时距l1/s 2
下载: 导出CSV
表 3 初始车辆位置分布
Table 3. Initial vehicle position distribution
主道车辆 a1 a2 a3 a4 a5 a6 a7 a8 a9 车头时距/s 0 3.1 2.7 2.3 2.4 2.5 2.2 3.5 3.2 匝道车辆 b1 b2 b3 b4 b5 b6 车头时距/s 2.5 3.3 4.4 4.0 2.2 3.9
下载: 导出CSV
-
[1] 杨林瑶, 陈思远, 王晓, 等. 数字孪生与平行系统: 发展现状、对比及展望[J]. 自动化学报, 2019, 45(11): 2001-2031. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201911001.htmYANG Lin-yao, CHEN Si-yuan, WANG Xiao, et al. Digital twins and parallel systems: state of the art, comparisons and prospect[J]. Acta Automatica Sinica, 2019, 45(11): 2001-2031. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201911001.htm [2] 《中国公路学报》编辑部. 中国交通工程学术研究综述·2016[J]. 中国公路学报, 2016, 29(6): 1-161. doi: 10.3969/j.issn.1001-7372.2016.06.001Editorial Department of China Journal of Highway and Transport. Review on China's traffic engineering research progress: 2016[J]. China Journal of Highway and Transport, 2016, 29(6): 1-161. (in Chinese) doi: 10.3969/j.issn.1001-7372.2016.06.001 [3] LIU Yan-chao. An optimization-driven dynamic vehicle routing algorithm for on-demand meal delivery using drones[J]. Computers and Operations Research, 2019, 111: 1-20. doi: 10.1016/j.cor.2019.05.024 [4] ZHANG Zhen-hua, HE Qing, GOU Ji-zhan, et al. Performance measure for reliable travel time of emergency vehicles[J]. Transportation Research Part C: Emerging Technologies, 2016, 65: 97-110. doi: 10.1016/j.trc.2016.01.015 [5] WANG Chen, DAI Yu-lu, XIA Jing-xin. A CAV platoon control method for isolated intersections: guaranteed feasible multi-objective approach with priority[J]. Energies, 2020, 13(3): 625. doi: 10.3390/en13030625 [6] 王德勇. 基于火灾数据的消防时间关联分析与应急决策模型研究[D]. 合肥: 中国科学技术大学, 2013.WANG De-yong. Correlation analysis and emergency decision model research on fire rescue time based on fires data[D]. Hefei: University of Science and Technology of China, 2013. (in Chinese) [7] BURDON C A, CARSTAIRS G L, LINNANE D M, et al. Identifying physically demanding tasks performed by the Royal Australian Navy for the development of a physical employment standard[J]. Journal of Occupational and Environmental Medicine, 2019, 61(9): e384-e393. doi: 10.1097/JOM.0000000000001663 [8] CAO Jie, HAN He, JIANG Yi-ping, et al. Emergency rescue vehicle dispatch planning using a hybrid algorithm[J]. International Journal of Information Technology and Decision Making, 2018, 17(6): 1865-1890. doi: 10.1142/S0219622018500414 [9] LIU Hong-fu, WANG Zi-ang, YANG Chen-xi, et al. Effect of coarse aggregate characteristics on skid resistance deterioration of the ultrathin wearing course[J]. Journal of Materials in Civil Engineering, 2021, 33(4): 04021051. doi: 10.1061/(ASCE)MT.1943-5533.0003618 [10] 孟哲, 朱西产, 马志雄. 基于自然驾驶数据的匝道区域驾驶特征分析[J]. 同济大学学报(自然科学版), 2017, 45(增1): 6-13. https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ2017S1003.htmMENG Zhe, ZHU Xi-chan, MA Zhi-xiong. Driving characteristics analysis of ramp area based on natural driving data[J]. Journal of Tongji University (Natural Science), 2017, 45(S1): 6-13. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ2017S1003.htm [11] 温惠英, 吴嘉彬, 漆巍巍, 等. 高速公路入口匝道合流区的CP-CS融合模型[J]. 华南理工大学学报(自然科学版), 2020, 48(2): 50-57. https://www.cnki.com.cn/Article/CJFDTOTAL-HNLG202002007.htmWEN Hui-ying, WU Jia-bin, QI Wei-wei, et al. A CP-CS fusion model for on-ramp merging area on the highway[J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(2): 50-57. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HNLG202002007.htm [12] ZHU Jie, TASIC I. Safety analysis of freeway on-ramp merging with the presence of autonomous vehicles[J]. Accident Analysis and Prevention, 2021, 152: 105966. doi: 10.1016/j.aap.2020.105966 [13] NTOUSAKIS I A, NIKOLOS I K, PAPAGEORGIOU M. Optimal vehicle trajectory planning in the context of cooperative merging on highways[J]. Transportation Research Part C: Emerging Technologies, 2016, 71: 464-488. doi: 10.1016/j.trc.2016.08.007 [14] 刘畅, 庄伟超, 殷国栋, 等. 高速匝道入口多智能网联车协同合流控制[J]. 东南大学学报(自然科学版), 2020, 50(5): 965-972. https://www.cnki.com.cn/Article/CJFDTOTAL-DNDX202005024.htmLIU Chang, ZHUANG Wei-chao, YIN Guo-dong, et al. Cooperative merging control of multiple connected and automated vehicles on freeway ramp[J]. Journal of Southeast University (Natural Science Edition), 2020, 50(5): 965-972. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DNDX202005024.htm [15] LETTER C, ELEFTERIADOU L. Efficient control of fully automated connected vehicles at freeway merge segments[J]. Transportation Research Part C: Emerging Technologies, 2017, 80: 190-205. doi: 10.1016/j.trc.2017.04.015 [16] CAO Wen-jing, MUKAI M, KAWABE T, et al. Cooperative vehicle path generation during merging using model predictive control with real-time optimization[J]. Control Engineering Practice, 2015, 34: 98-105. doi: 10.1016/j.conengprac.2014.10.005 [17] ZHANG Jing, ZHUANG Jun, BEHLENDORF B. Stochastic shortest path network interdiction with a case study of Arizona-Mexico border[J]. Reliability Engineering and System Safety, 2018, 179: 62-73. doi: 10.1016/j.ress.2017.10.026 [18] MIN Hai-gen, FANG Yu-kun, WANG Run-min, et al. A novel on-ramp merging strategy for connected and automated vehicles based on game theory[J]. Journal of Advanced Transportation, 2020, 2020: 2529856. https://www.hindawi.com/journals/jat/2020/2529856/ [19] WANG Meng, HOOGENDOORN S P, DAAMEN W, et al. Game theoretic approach for predictive lane-changing and car-following control[J]. Transportation Research Part C: Emerging Technologies, 2015, 58: 73-92. doi: 10.1016/j.trc.2015.07.009 [20] MARTIN-GASULLA M, ELEFTERIADOU L. Traffic management with autonomous and connected vehicles at single-lane roundabouts[J]. Transportation Research Part C: Emerging Technologies, 2021, 125: 102964. doi: 10.1016/j.trc.2021.102964 [21] 杨敏, 王立超, 张健, 等. 面向智慧高速的合流区协作车辆冲突解脱协调方法[J]. 交通运输工程学报, 2020, 20(3): 217-224. doi: 10.19818/j.cnki.1671-1637.2020.03.020YANG Min, WANG Li-chao, ZHANG Jian, et al. Collaborative method of vehicle conflict resolution in merging area for intelligent expressway[J]. Journal of Traffic and Transportation Engineering, 2020, 20(3): 217-224. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2020.03.020 [22] RIOS-TORRES J, MALIKOPOULOS A A. Automated and cooperative vehicle merging at highway on-ramps[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 18(4): 780-789. https://ieeexplore.ieee.org/document/7534837 [23] HANG Peng, HUANG Chao, HU Zhong-xu, et al. Decision making of connected automated vehicles at an unsignalized round about considering personalized driving behaviours[J]. IEEE Transactions on Vehicular Technology, 2021, 70(5): 4051-4064. doi: 10.1109/TVT.2021.3072676 [24] MEHR N, LI Ruo-lin, HOROWITZ R. A game theoretic model for aggregate bypassing behavior of vehicles at traffic diverges[C]//IEEE. 2018 21st International Conference on Intelligent Transportation Systems. New York: IEEE, 2018: 1968-1973. [25] JING Shou-cai, HUI Fei, ZHAO Xiang-mo, et al. Cooperative game approach to optimal merging sequence and on-ramp merging control of connected and automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(11): 4234-4244. doi: 10.1109/TITS.2019.2925871 [26] 秦严严, 胡兴华, 李淑庆, 等. 智能网联环境下混合交通流稳定性解析[J]. 哈尔滨工业大学学报, 2021, 53(3): 152-157. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBX202103019.htmQIN Yan-yan, HU Xing-hua, LI Shu-qing, et al. Stability analysis of mixed traffic flow in connected and autonomous environment[J]. Journal of Harbin Institute of Technology, 2021, 53(3): 152-157. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HEBX202103019.htm [27] YUAN Sheng-cheng, CHUN S A, SPINELLI B, et al. Traffic evacuation simulation based on multi-level driving decision model[J]. Transportation Research Part C: Emerging Technologies, 2017, 78: 129-149. doi: 10.1016/j.trc.2017.03.001 [28] 宋现敏, 马林, 李丽丽, 等. 公交与右转混合型专用道仿真分析及效益评价[J]. 中国公路学报, 2019, 32(5): 142-152. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201905015.htmSONG Xian-min, MA Lin, LI Li-li, et al. Simulation analysis and benefit evaluation of bus and right turn exclusive lanes[J]. China Journal of Highway and Transport, 2019, 32(5): 142-152. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201905015.htm [29] DING Heng, DI Yun-ran, ZHENG Xiao-yan, et al. Automated cooperative control of multilane freeway merging areas in connected and autonomous vehicle environments[J]. Transportmetrica B: Transport Dynamics, 2021, 9(1): 437-455. doi: 10.1080/21680566.2021.1887774 [30] HE Xing-lei, CHENG Hong-jie, LIU Zhi-hao, et al. Comparative study on anti-lock braking control strategies based on heavy-duty multi-axle special vehicles[C]//IEEE. 2021 IEEE 4th Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC). New York: IEEE, 2021: 780-785. [31] KAMAL M A S, MUKAI M, MURATA J, et al. Ecological vehicle control on roads with up-down slopes[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(3): 783-794. doi: 10.1109/TITS.2011.2112648 -




 点击查看大图
点击查看大图

图(7) / 表(3)
计量
- 文章访问数: 929
- HTML全文浏览量: 281
- PDF下载量: 123
- 被引次数: 0
