

Modeling and simulation of rescue boat's launching from a ship
-
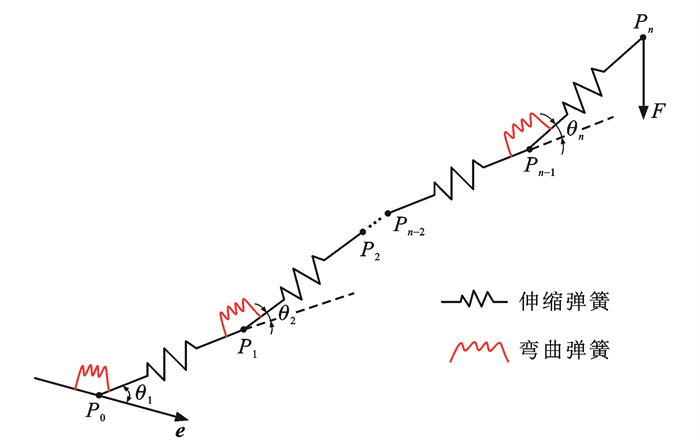
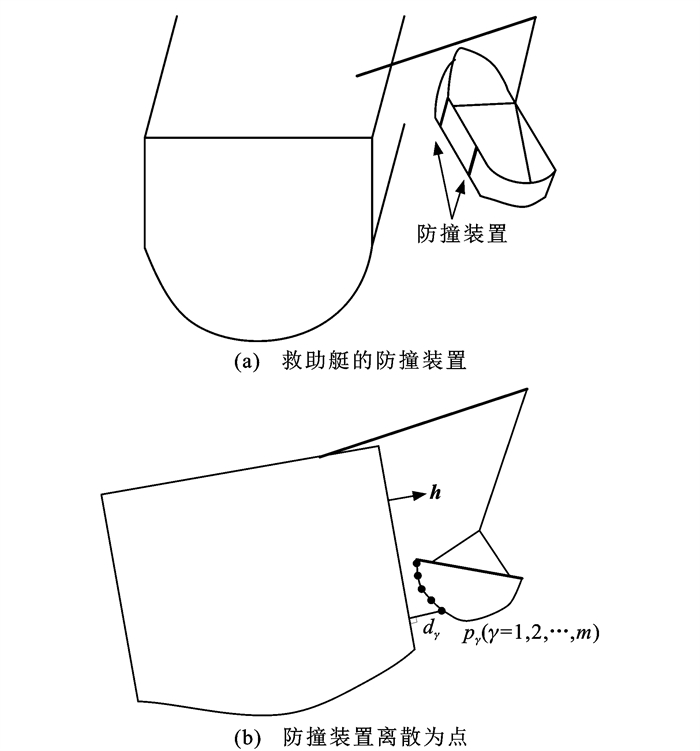
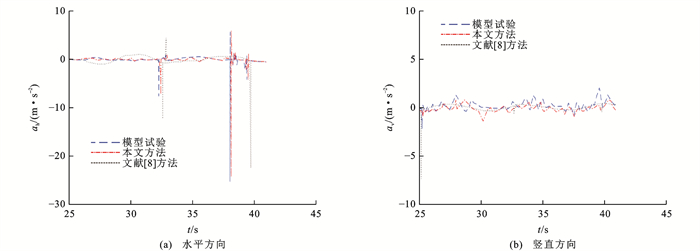
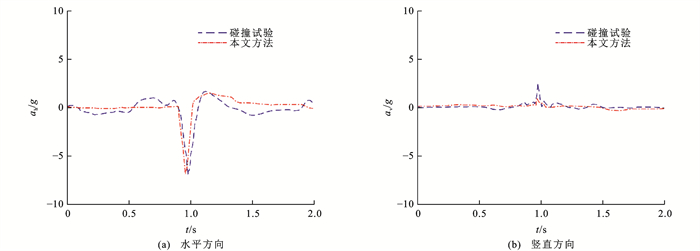
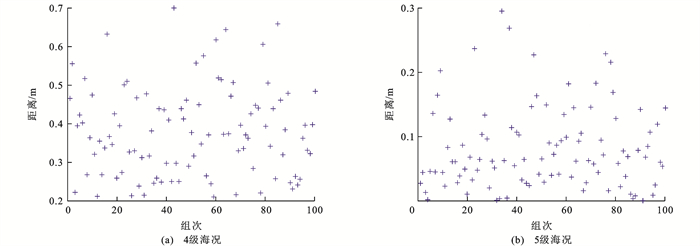
摘要: 采用Kane方法建立了救助艇释放运动模型,考虑了救助艇、柔性吊臂、吊索及船舶之间耦合运动;采用集中质量法建立了吊臂模型,根据弹性应变能函数及耗散函数计算了吊臂的内力;将救助艇和船舶之间的碰撞分为压缩和恢复2个阶段,分别根据赫兹接触理论和永久凹坑的接触力模型计算碰撞力;将吊臂模型与基于伯努利-欧拉梁理论的模型对比,稳定状态的吊臂形状基本一致;将救助艇释放运动模型与现有方法对比,进行了横浪条件下救助艇释放仿真试验与救助艇轨迹在水平和竖直方向的误差分析。分析结果表明:在波高为3 m,波长为245 m时,本文方法的平均绝对误差分别为0.11和0.12 m,现有方法的平均绝对误差分别为0.54和0.34 m;在波高为2 m,波长为60 m时,本文方法的平均绝对误差分别为0.09和0.14 m,现有方法的平均绝对误差分别为1.72和0.31 m;本文方法平均绝对误差均低于现有方法,可见本文方法提高了横浪条件下救助艇释放运动的计算精度;与碰撞试验对比,水平和竖直方向加速度峰值的相对误差分别约为0.5%和60.0%,水平方向加速度的峰值具有较高精确度,可见救助艇释放运动模型可用于辅助分析碰撞试验;根据救助艇释放运动模型,横浪条件下,为避免发生碰撞,4级海况时,救助艇与船舷初始距离最小为2.0倍艇宽,5级海况时,救助艇与船舷初始距离最小为2.5倍艇宽。Abstract: The model of rescue boat launching was built by using the Kane's method, and the coupled motion of the rescue boat, flexible boom, sling, and ship was considered. The boom model was constructed by using the lumped mass method, and the internal force of the boom was calculated by the elastic strain energy function and dissipation function. The collision between the rescue boat and the ship was divided into the phases of compression and restitution, and the collision force was calculated according to the Hertz contact theory and the contact force model of permanent indentations separately. The boom model was compared with the model based on the Bernoulli-Euler beam theory, and the boom's profiles were almost the same in a steady state. The model of rescue boat launching was compared with the existing method, and the simulation experiment of rescue boat launching and error analysis of rescue boat trajectories in horizontal and vertical directions were carried out under the cross wave. Analysis results show that at a wave height of 3 m and a wavelength of 245 m, the average absolute errors of the proposed method are 0.11 and 0.12 m, respectively, and 0.54 and 0.34 m with the existing method. At a wave height of 2 m and a wavelength of 60 m, the average absolute errors of the proposed method are 0.09 and 0.14 m, respectively, and 1.72 and 0.31 m with the existing method. The average absolute errors of the proposed method are lower than those of existing method. Thus, the proposed method improves the calculation accuracy of the rescue boat's launching under the cross wave. Compared with the results of the collision experiment, the relative errors of horizontal and vertical acceleration peaks are about 0.5% and 60.0%, respectively, and as the horizontal acceleration peak is highly accurate, the model of rescue boat launching can assist the analysis of the collision experiment. On the basis of the model of rescue boat launching, the minimum initial distance between the rescue boat and the ship's side is 2.0 times the width of the boat in sea state 4 and 2.5 times the width of the boat in sea state 5 to avoid collision under the cross wave. 4 tabs, 22 figs, 27 refs.
-
Key words:
- ship engineering /
- rescue boat /
- multibody dynamics /
- Kane's method /
- lumped mass method /
- Hertz contact
-

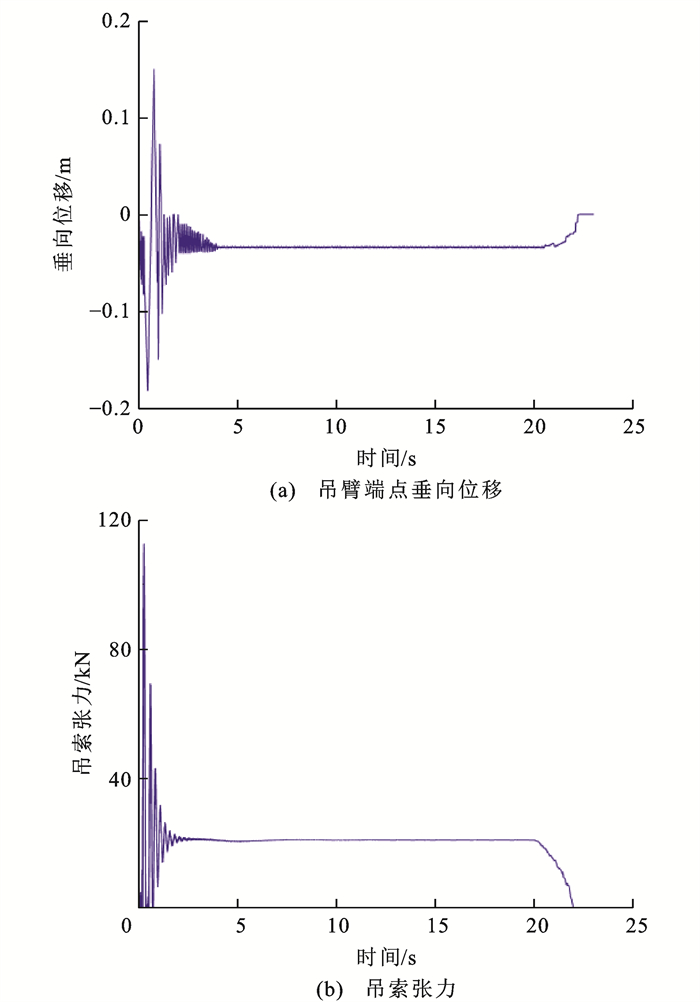
图 6 吊臂端点垂向位移与吊索拉力
Figure 6. Vertical displacements of end point of boom and rope tensions

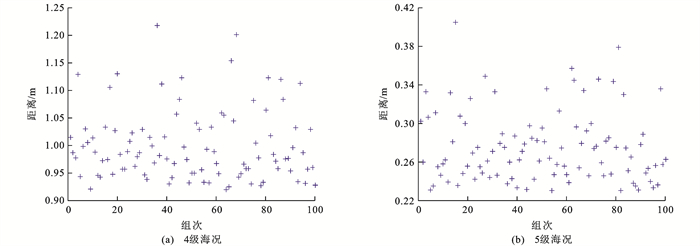
图 20 初始距离为2.0倍艇宽时救助艇与船舷最小距离
Figure 20. Minimum distances between rescue boat and ship's side when initial distance is 2.0 times width of boat

图 21 初始距离为2.5倍艇宽时救助艇与船舷最小距离
Figure 21. Minimum distances between rescue boat and ship's side when initial distance is 2.5 times width of boat
表 1 救助艇的基本信息
Table 1. Basic information of rescue boat
参数 数值 长、宽、高/m 4.6、2.2、1.1 3个横截面面积/m2 2.3、4.8、9.3 3个轴转动惯量/(kg·m2) 2 023、4 785、4 975 质量/kg 2 120 稳性高度/m 1.7 重心距中心距离/m 0.2 空气阻力系数 0.5 海水阻力系数 1.2 升力系数 0.4 泊松比 0.45 杨氏模量/GPa 55 碰撞恢复系数 0.8  下载: 导出CSV
下载: 导出CSV
表 2 船舶的基本信息
Table 2. Basic information of ship
参数 数值 船长/m 139.8 水线长/m 130.55 两柱间长/m 126 宽/m 20.8 吃水/m 4.4 型深/m 11.4 重心距船中的距离/m 2.3 方形系数 0.68 水线面系数 0.83 泊松比 0.3 杨氏模量/GPa 200 排水量/kg 14 680 000
下载: 导出CSV
-
[1] 齐广东. 高海况救助艇收放装置控制系统设计及仿真[D]. 哈尔滨: 哈尔滨工程大学, 2011.QI Guang-dong. Design and simulation of launch and recovery device of rescue boat at abominable sea condition[D]. Harbin: Harbin Engineering University, 2011. (in Chinese) [2] 康硕. 高海况救生艇收放装置主动防摆控制研究[D]. 哈尔滨: 哈尔滨工程大学, 2012.KANG Shuo. Research on the active pendulation control of davit for lifeboat under the high seastates[D]. Harbin: Harbin Engineering University, 2012. (in Chinese) [3] 史洪宇. 工作艇收放装置关键技术及控制策略研究[D]. 哈尔滨: 哈尔滨工程大学, 2013.SHI Hong-yu. Researches of key technologies and control methods of working boat davit[D]. Harbin: Harbin Engineering University, 2013. (in Chinese) [4] 郭翔宇, 何术龙. 船吊系统大幅运动的分析方法[J]. 中国造船, 2018, 59(3): 164-170. doi: 10.3969/j.issn.1000-4882.2018.03.017GUO Xiang-yu, HE Shu-long. A numerical method for motion of ship crane system with large amplitude[J]. Shipbuilding of China, 2018, 59(3): 164-170. (in Chinese) doi: 10.3969/j.issn.1000-4882.2018.03.017 [5] 王生海. 船用起重机吊重系统动力学分析与防摆控制研究[D]. 大连: 大连海事大学, 2018.WANG Sheng-hai. Dynamic analysis and anti-swing control of ship-mounted crane payload system[D]. Dalian: Dalian Maritime University, 2018. (in Chinese) [6] 任会礼. 锚泊起重船刚柔耦合动力学建模及其动态特性研究[D]. 武汉: 华中科技大学, 2008.REN Hui-li. Research on rigid-flexible coupling model and dynamic characters of moored crane ship[D]. Wuhan: Huazhong University of Science and Technology, 2008. (in Chinese) [7] 任会礼, 王学林, 胡于进, 等. 考虑吊臂弹性的锚泊起重船动力特性研究[J]. 机械工程学报, 2009, 45(10): 42-47. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200910011.htmREN Hui-li, WANG Xue-lin, HU Yu-jin, et al. Dynamic response analysis of moored crane-ship with flexible booms[J]. Journal of Mechanical Engineering, 2009, 45(10): 42-47. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200910011.htm [8] EKMAN P. A numerical model to simulate launching of evacuation capsules from a ship in beam seas-simulations and validation using experimental tests[J]. International Shipbuilding Progress, 2006, 53: 83-102. [9] EKMAN P. Numerical study of a method to reduce rescue boat motions during launching from a ship in waves[J]. Marine Systems and Ocean Technology, 2005, 1(2): 91-97. doi: 10.1007/BF03449199 [10] DYMARSKI P, DYMARSKI C. Computational model for simulation of lifeboat motions during its launching from ship in rough seas[J]. Polish Maritime Research, 2012, 19: 45-52. [11] RAMAN-NAIR W, RE A S, VEITCH B. Dynamics of lifeboat and boom in deployment from a moving support[J]. Multibody System Dynamics, 2005, 13(3): 267-298. doi: 10.1007/s11044-005-4084-4 [12] DYMARSKI P, DYMARSKI C, KNIAT A. Searching for critical conditions during lifeboat launching-simulations[J]. Polish Maritime Research, 2017, 24: 53-58. [13] KNIAT A. Visualization of a lifeboat motion during lowering along ship's side[J]. Polish Maritime Research, 2017, 24(4): 42-46. doi: 10.1515/pomr-2017-0134 [14] SANDARUWAN D, KODIKARA N, ROSA R, et al. Modeling and simulation of environmental disturbances for six degrees of freedom ocean surface vehicle[J]. Sri Lankan Journal of Physics, 2009, 10: 39-57. doi: 10.4038/sljp.v10i0.3834 [15] BANERJEE A K, NAGARAJAN S. Efficient simulation of large overall motion of beams undergoing large deflection[J]. Multibody System Dynamics, 1997, 1(1): 113-126. doi: 10.1023/A:1009720622253 [16] LIU J Y, HONG J Z. Dynamics of three-dimensional beams undergoing large overall motion[J]. European Journal of Mechanics, 2004, 23(6): 1051-1068. doi: 10.1016/j.euromechsol.2004.08.003 [17] HAERING W J, RYAN R R, SCOTT R A. New formulation for flexible beams undergoing large overall plane motion[J]. Journal of Guidance Control, and Dynamics, 1994, 17(1): 76-83. doi: 10.2514/3.21161 [18] RAMAN-NAIR W, BADDOUR R E. Three-dimensional dynamics of a flexible marine riser undergoing large elastic deformations[J]. Multibody System Dynamics, 2003, 10(4): 393-423. doi: 10.1023/A:1026213630987 [19] QIU S, REN H, LI H. Computational model for simulation of lifeboat free-fall during its launching from ship in rough seas[J]. Journal of Marine Science and Engineering, 2020, 8(9): 631. doi: 10.3390/jmse8090631 [20] RAMAN-NAIR W, CHIN S N. Estimation of impact forces between small bodies in waves[J]. Ocean Engineering, 2012, 46: 46-51. doi: 10.1016/j.oceaneng.2012.03.001 [21] MACHADO M, MOREIRA P, FLORES P, et al. Compliant contact force models in multibody dynamics: evolution of the hertz contact theory[J]. Mechanism and Machine Theory, 2012, 53: 99-121. doi: 10.1016/j.mechmachtheory.2012.02.010 [22] LANKARANI H M, NIKRAVESH P E. Continuous contact force models for impact analysis in multibody systems[J]. Nonlinear Dynamics, 1994, 5(2): 193-207. [23] BISSHOPP K E, DRUCKER D C. Large deflection of cantilever beams[J]. Quarterly of Applied Mathematics, 1945, 3(3): 272-275. doi: 10.1090/qam/13360 [24] ARAI M, KHONDOKER M R H, INOUE Y. Water entry simulation of free-fall lifeboat first report: analysis of motion and acceleration[J]. Journal of the Society of Naval Architects of Japan, 1995, 178: 193-201. [25] 陈成军, 陈小伟, 柳明. 接触-碰撞算法研究进展[J]. 计算力学学报, 2018, 35(3): 261-274. https://www.cnki.com.cn/Article/CJFDTOTAL-JSJG201803001.htmCHEN Cheng-jun, CHEN Xiao-wei, LIU Ming. Review of research progress in contact-impact algorithms[J]. Chinese Journal of Computational Mechanics, 2018, 35(3): 261-274. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSJG201803001.htm [26] 钱小斌, 尹勇, 张秀凤, 等. 海上不规则波浪扰动对船舶运动的影响[J]. 交通运输工程学报, 2016, 16(3): 116-124. doi: 10.3969/j.issn.1671-1637.2016.03.014QIAN Xiao-bin, YIN Yong, ZHANG Xiu-feng, et al. Influence of irregular disturbance of sea wave on ship motion[J]. Journal of Traffic and Transportation Engineering, 2016, 16(3): 116-124. (in Chinese) doi: 10.3969/j.issn.1671-1637.2016.03.014 [27] 张秀凤, 尹勇, 金一丞. 规则波中船舶运动六自由度数学模型[J]. 交通运输工程学报, 2007, 7(3): 40-43. doi: 10.3321/j.issn:1671-1637.2007.03.009ZHANG Xiu-feng, YIN Yong, JIN Yi-cheng. Ship motion mathematical model with six degrees of freedom in regular wave[J]. Journal of Traffic and Transportation Engineering, 2007, 7(3): 40-43. (in Chinese) doi: 10.3321/j.issn:1671-1637.2007.03.009 -








 点击查看大图
点击查看大图

计量
- 文章访问数: 725
- HTML全文浏览量: 189
- PDF下载量: 60
- 被引次数: 0
