

Non-FIFO vehicle trajectory estimation algorithm under non-free traffic flow
-
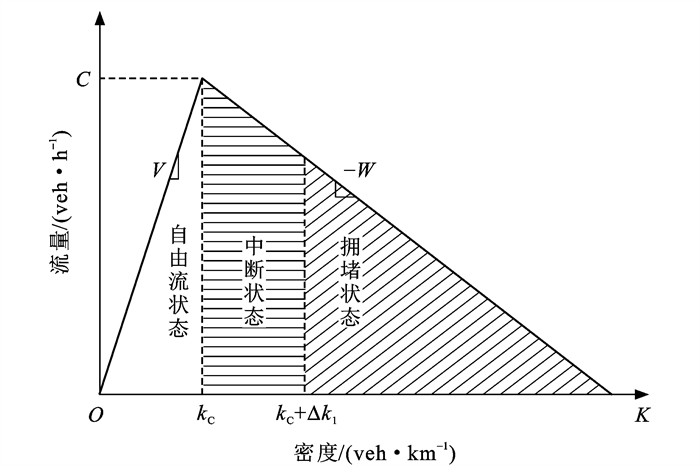
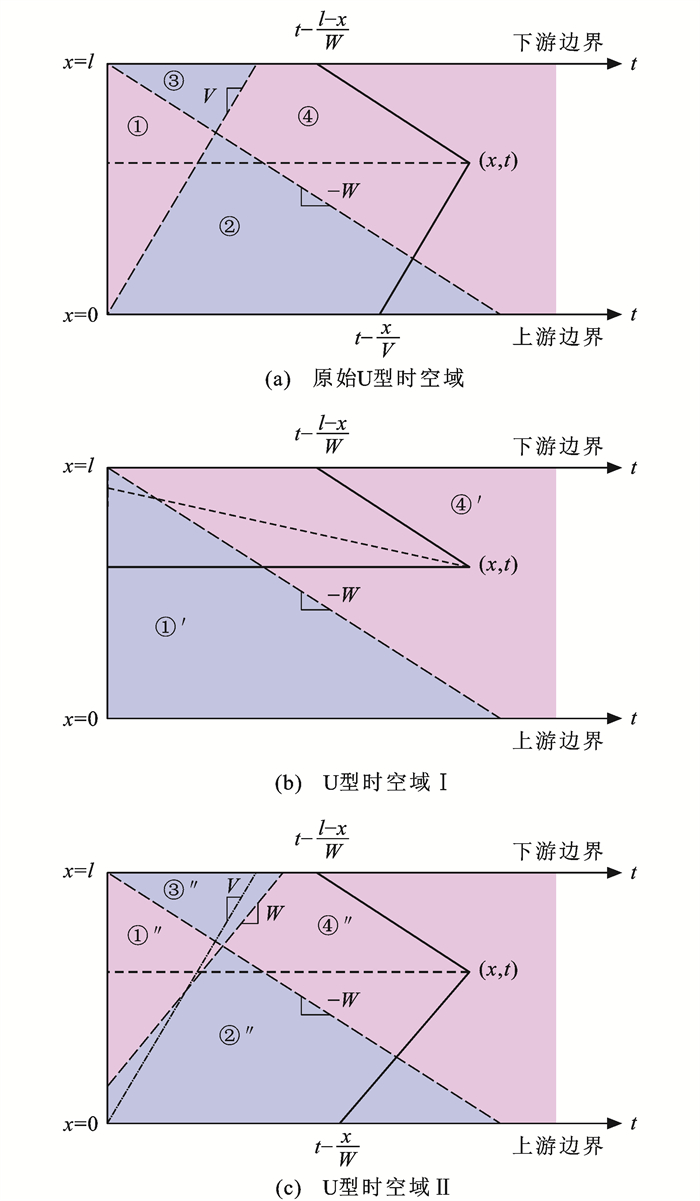
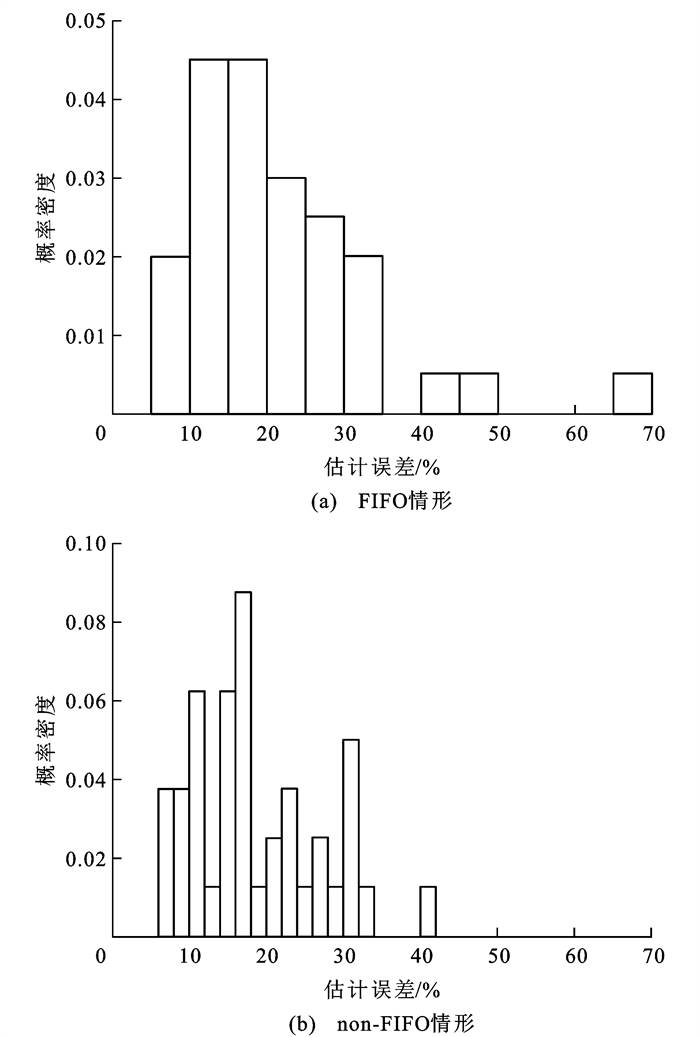
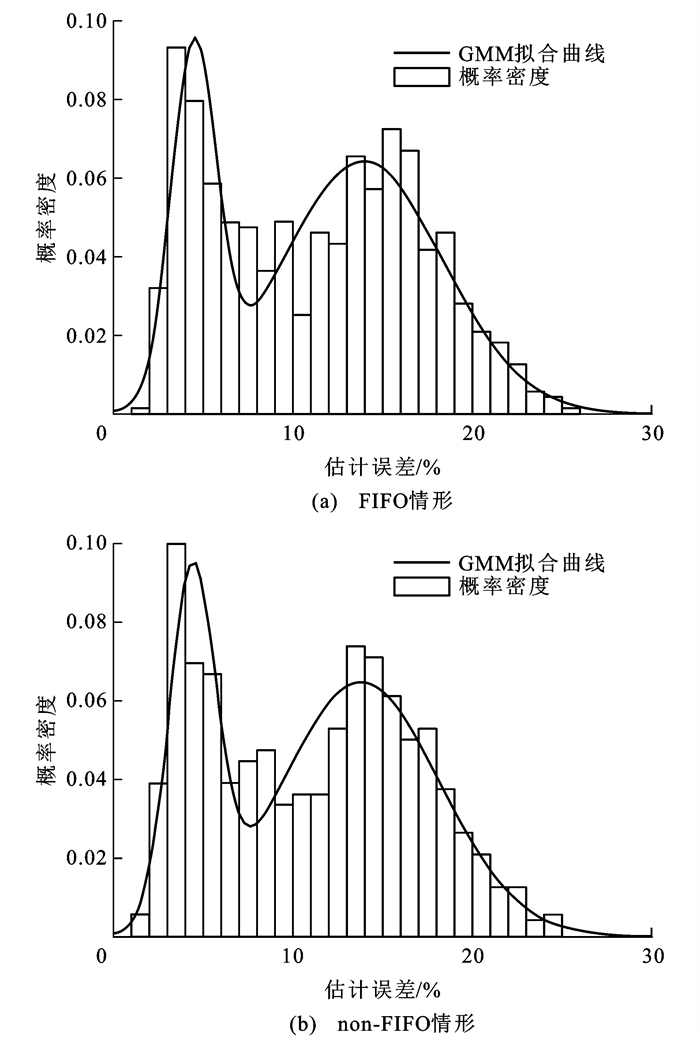
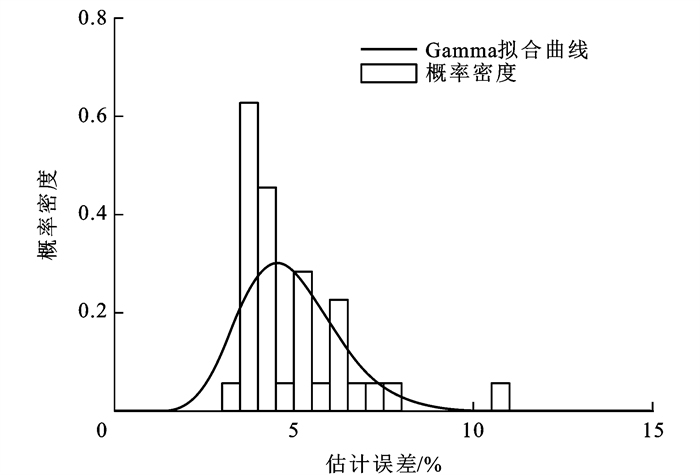
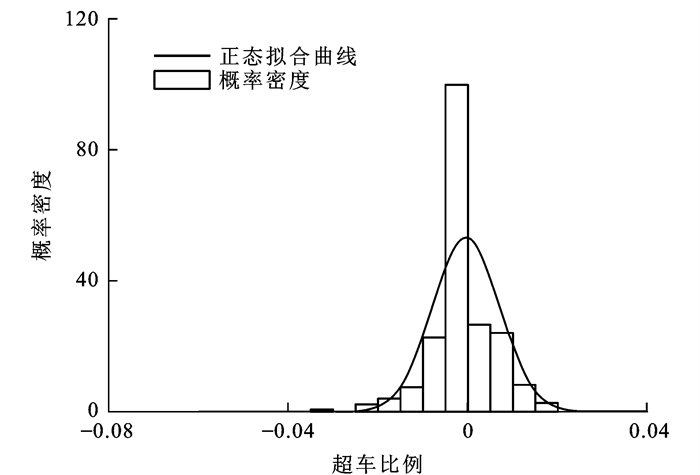
摘要: 将三角基本图的交通状态细分为自由流、中断和拥堵;基于非自由流特性,重新划分了U型时空域,以此找到适合的波速范围;重新确定了上游边界累积流量,使得边界函数刻画不过于宽泛;建立了非自由流Newell模型,并提出了使用该模型的判断条件;引入了车辆秩参数,达到在多车道上描述车辆超车现象的目的,并建立了更精确的车辆秩估计模型,从而建立了非自由流Newell扩展模型;提出了针对非自由流下2种情形的车辆轨迹估计算法,根据是否存在超车现象分为先进先出(FIFO)情形与非先进先出(non-FIFO)情形;结合数值模拟和实际交通案例,验证了算法的有效性。研究结果表明:2种情形下的轨迹估计算法都是有效的,当超车现象存在时,non-FIFO情形的估计效果较准确和稳健;在数值模拟研究中,non-FIFO情形的估计误差相对FIFO情形下降13.45%,non-FIFO情形更优;实际交通案例中,2个小汽车数据集在non-FIFO情形的估计误差相对FIFO情形均有所下降,下降幅度分别为2.38%、2.04%,且估计误差均服从高斯混合模型;公交车数据集因不存在超车现象,non-FIFO与FIFO情形的估计误差相等,均为4.90%,且估计误差服从伽马分布。可见,所建立的非自由流Newell模型对于中断多或拥堵状态占比多的交通数据均是有效可行的,且所提出的non-FIFO和FIFO情形的轨迹估计算法效果表现良好。Abstract: The traffic state of the triangular fundamental diagram (TFD) was subdivided into free flow, breakdown, and jam. According to the non-free flow characteristics, the U-shaped spatial-temporal domain was re-divided to find the suitable wave velocity range. The cumulative flow of the upstream boundary was redefined so that the description of the boundary function was not too broad. The Newell's model under non-free flow was established, and the criterion of whether the model can be used was proposed. A parameter of vehicle's rank was introduced to realize the goal of describing multilane overtaking phenomena, and a more accurate estimation model of vehicle's rank was established. Then the Newell's extended model under non-free flow was developed. The vehicle trajectory estimation algorithms were proposed for the two situations of non-free flow, namely first-in-first-out (FIFO) situation and non-first-in-first-out (non-FIFO) situation, which were divided according to whether there was an overtaking phenomenon. The effectiveness of the algorithms was then verified by numerical simulation and real traffic cases. Analysis results show that the trajectory estimation algorithms are effective in both situations. When an overtaking phenomenon occurs, the estimation effect of the non-FIFO situation is more accurate and robust. In the numerical simulation study, the estimation error of the non-FIFO situation decreases by 13.45% compared with that of the FIFO situation, namely that the result of the non-FIFO situation is better. In the real traffic cases, the non-FIFO situation has 2.38% and 2.04% lower estimation errors than the FIFO situation on two car datasets, respectively, and the estimation errors all follow the Gaussian mixture model (GMM). Because there is no overtaking phenomenon in the bus dataset, the estimation errors of the non-FIFO situation and the FIFO situation are equal, which are both 4.90% and follow the Gamma distribution. Therefore, the established Newell's model under the non-free flow is effective and feasible for the traffic data with a large proportion of breakdowns or jams, and the proposed trajectory estimation algorithms of FIFO and non-FIFO situations perform well. 6 tabs, 13 figs, 30 refs.
-

图 5 修正系数与平均估计误差关系
Figure 5. Relationship between correction factor and mean estimation error
表 1 模拟数据集参数值
Table 1. Parameter values of simulated dataset
N0/veh W/(km·h-1) K/(veh·km-1) λ M 0 25.27 100 0.6 0.003 2  下载: 导出CSV
下载: 导出CSV
表 2 模拟数据估计误差汇总
Table 2. Summary of simulation data estimation errors
Ef/% σ(Ef) En/% σ(En) $\tilde E$ 21.48 11.988 18.59 8.499 13.45
下载: 导出CSV
表 3 实际交通案例详细信息
Table 3. Details of actual traffic cases
数据集 车辆类型 起点/km 终点/km 车辆数/veh 轨迹点/个 1 小汽车 0.600 2.277 716 178 565 2 小汽车 0.984 2.277 718 147 656 3 公交车 0.874 1.590 35 4 233
下载: 导出CSV
表 4 实际交通案例参数值
Table 4. Parameter values of actual traffic cases
数据集 N0/veh W/(km·h-1) K/(veh·km-1) λ M 1 1 29.16 142.239 1.0 0.000 0 2 1 25.74 185.074 1.3 0.002 5 3 1 22.10 48.931 1.0 0.000 0
下载: 导出CSV
表 5 拟合分布参数值
Table 5. Fitted distribution parameter values
数据集 情形 ω1 μ1 σ12 α ω2 μ2 σ22 β 1 FIFO 0.365 6.692 5.655 0.635 16.032 12.539 non-FIFO 0.382 6.654 5.871 0.618 15.826 10.667 2 FIFO 0.279 4.477 1.573 0.721 13.928 20.061 non-FIFO 0.289 4.368 1.685 0.711 13.788 19.281 3 FIFO 12.889 2.627 non-FIFO
下载: 导出CSV
表 6 实际交通案例估计误差汇总
Table 6. Summary of estimation errors for actual traffic cases
数据集 Ef/% σ(Ef) En/% σ(En) $\tilde E$ 1 12.62 5.504 2 12.32 5.360 2 2.38 2 11.30 5.740 2 11.07 5.721 5 2.04 3 4.90 1.529 0 4.90 1.529 0 0.00
下载: 导出CSV
-
[1] 胡明伟, 王守峰, 黄文柯, 等. 基于车牌识别数据的行驶轨迹重构和排放测算[J]. 深圳大学学报(理工版), 2020, 37(2): 111-120. https://www.cnki.com.cn/Article/CJFDTOTAL-SZDL202002001.htmHU Ming-wei, WANG Shou-feng, HUANG Wen-ke, et al. Vehicle trajectory reconstruction and emission estimation based on license plate recognition data[J]. Journal of Shenzhen University (Science and Engineering), 2020, 37(2): 111-120. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-SZDL202002001.htm [2] 陆键, 王可, 蒋愚明. 基于车辆行驶轨迹的道路不良驾驶行为实时辨识方法[J]. 交通运输工程学报, 2020, 20(6): 227-235. doi: 10.19818/j.cnki.1671-1637.2020.06.020LU Jian, WANG Ke, JIANG Yu-ming. Real-time identification method of abnormal road driving behavior based on vehicle driving trajectory[J]. Journal of Traffic and Transportation Engineering, 2020, 20(6): 227-235. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2020.06.020 [3] TAN Chao-peng, LIU Lei, WU Hao, et al. Fuzing license plate recognition data and vehicle trajectory data for lane-based queue length estimation at signalized intersections[J]. Journal of Intelligent Transportation Systems, 2020, 24(5): 449-466. doi: 10.1080/15472450.2020.1732217 [4] NEWELL G F. A simplified theory of kinematic waves in highway traffic, Part Ⅰ: general theory[J]. Transportation Research Part B: Methodological, 1993, 27(4): 281-287. doi: 10.1016/0191-2615(93)90038-C [5] LIGHTHILL M J, WHITHAM G B. On kinematic waves. Ⅱ: a theory of traffic flow on long crowded roads[J]. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 1955, 229: 317-345. [6] RICHARDS P I. Shock waves on the highway[J]. Operations Research, 1956, 4(1): 42-51. doi: 10.1287/opre.4.1.42 [7] MAZARÉ P E, DEHWAH A H, CLAUDEL C G, et al. Analytical and grid-free solutions to the Lighthill-Whitham-Richards traffic flow model[J]. Transportation Research Part B: Methodological, 2011, 45(10): 1727-1748. doi: 10.1016/j.trb.2011.07.004 [8] MEHRAN B, KUWAHARA M, NAZNIN F, et al. Implementing kinematic wave theory to reconstruct vehicle trajectories from fixed and probe sensor data[J]. Transportation Research Part C: Emerging Technologies, 2012, 20(1): 144-163. doi: 10.1016/j.trc.2011.05.006 [9] JIN Wen-long. Continuous formulations and analytical properties of the link transmission model[J]. Transportation Research Part B: Methodological, 2015, 74: 88-103. doi: 10.1016/j.trb.2014.12.006 [10] MO B, LI Rui-ming, ZHAN Xian-yuan, et al. Speed profile estimation using license plate recognition data[J]. Transportation Research Part C: Emerging Technologies, 2017, 82: 358-378. doi: 10.1016/j.trc.2017.07.006 [11] LI Jia, PERRINE K, WU Li-dong, et al. Cross-validating traffic speed measurements from probe and stationary sensors through state reconstruction[J]. International Journal of Transportation Science and Technology, 2019, 8(3): 290-303. doi: 10.1016/j.ijtst.2019.04.002 [12] SUN Zhan-bo, HAO Peng, BAN Xue-gang, et al. Trajectory-based vehicle energy/emissions estimation for signalized arterials using mobile sensing data[J]. Transportation Research Part D: Transport and Environment, 2015, 34: 27-40. doi: 10.1016/j.trd.2014.10.005 [13] WAN Nian-feng, VAHIDI A, LUCKOW A. Reconstructing maximum likelihood trajectory of probe vehicles between sparse updates[J]. Transportation Research Part C: Emerging Technologies, 2016, 65: 16-30. doi: 10.1016/j.trc.2016.01.010 [14] 刘春立, 黄琳娜. 交通事故中车辆运动轨迹估计方法研究与仿真[J]. 计算机仿真, 2012, 29(4): 375-378. doi: 10.3969/j.issn.1006-9348.2012.04.092LIU Chun-li, HUANG Lin-na. Research and simulation of estimate method of traffic accident vehicle trajectory[J]. Computer Simulation, 2012, 29(4): 375-378. (in Chinese) doi: 10.3969/j.issn.1006-9348.2012.04.092 [15] JIANG Zhou-tong, CHEN Xi-qun, OUYANG Yan-feng, et al. Traffic state and emission estimation for urban expressways based on heterogeneous data[J]. Transportation Research Part D: Transport and Environment, 2017, 53: 440-453. doi: 10.1016/j.trd.2017.04.042 [16] 季学武, 费聪, 何祥坤, 等. 基于LSTM网络的驾驶意图识别及车辆轨迹预测[J]. 中国公路学报, 2019, 32(6): 34-42. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906004.htmJI Xue-wu, FEI Cong, HE Xiang-kun, et al. Intention recognition and trajectory prediction for vehicles using LSTM network[J]. China Journal of Highway and Transport, 2019, 32(6): 34-42. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906004.htm [17] LI Xiao, ROSMAN G, GILITSCHENSKI I, et al. Vehicle trajectory prediction using generative adversarial network with temporal logic syntax tree features[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 3459-3466. doi: 10.1109/LRA.2021.3062807 [18] DONG Shuo-xuan, ZHOU Yang, CHEN Tian-yi, et al. An integrated empirical mode decomposition and Butterworth filter based vehicle trajectory reconstruction method[J]. Physica A: Statistical Mechanics and its Applications, 2021, 583: 126295. doi: 10.1016/j.physa.2021.126295 [19] JIN Wen-long. Unifiable multi-commodity kinematic wave model[J]. Transportation Research Procedia, 2017, 23: 137-156. doi: 10.1016/j.trpro.2017.05.009 [20] JIN Wen-long, YAN Qing-long. A formulation of unifiable multi-commodity kinematic wave model with relative speed ratios[J]. Transportation Research Part B: Methodological, 2019, 128: 236-253. doi: 10.1016/j.trb.2019.08.007 [21] REY A, JIN Wen-long, RITCHIE S G, et al. An extension of Newell's simplified kinematic wave model to account for first-in-first-out violation: with an application to vehicle trajectory estimation[J]. Transportation Research Part C: Emerging Technologies, 2019, 109: 79-94. doi: 10.1016/j.trc.2019.10.005 [22] WANG Ying, WEI Chong. A universal trajectory planning method for automated lane-changing and overtaking maneuvers[J]. Mathematical Problems in Engineering, 2020, 2020: 1023975. [23] HUI Fei, WEI Cheng, SHANGGUAN Wei, et al. Deep encoder-decoder-NN: a deep learning-based autonomous vehicle trajectory prediction and correction model[J]. Physica A: Statistical Mechanics and its Applications, 2022, 593: 126869. doi: 10.1016/j.physa.2022.126869 [24] 胡尧, 韦维, 商明菊, 等. 基于交通流生存函数的交叉口通行能力计算模型[J]. 交通运输工程学报, 2019, 19(4): 137-150. doi: 10.3969/j.issn.1671-1637.2019.04.013HU Yao, WEI Wei, SHANG Ming-ju, et al. Calculation model of intersection capacity based on traffic flow survival function[J]. Journal of Traffic and Transportation Engineering, 2019, 19(4): 137-150. (in Chinese) doi: 10.3969/j.issn.1671-1637.2019.04.013 [25] DENG Xiao-li, HU Yao, HU Qian. Fundamental diagram estimation based on random probe pairs on sub-segments[J]. Promet-Traffic and Transportation, 2020, 33(5): 717-730. [26] LI Li, JIANG Rui, HE Zheng-bing, et al. Trajectory data-based traffic flow studies: a revisit[J]. Transportation Research Part C: Emerging Technologies, 2020, 114: 225-240. doi: 10.1016/j.trc.2020.02.016 [27] 曹堉, 王成, 杨岳铭, 等. 基于贝叶斯网络的城市道路交通拥堵多原因自动实时识别[J]. 公路交通科技, 2020, 37(11): 89-97. doi: 10.3969/j.issn.1002-0268.2020.11.012CAO Yu, WANG Cheng, YANG Yue-ming, et al. Multi-cause automatic real-time recognition of urban road traffic congestion based on Bayesian network[J]. Journal of Highway and Transportation Research and Development, 2020, 37(11): 89-97. (in Chinese) doi: 10.3969/j.issn.1002-0268.2020.11.012 [28] MUNJAL P K, HSU Y S, LAWRENCE R L. Analysis and validation of lane-drop effects on multi-lane freeways[J]. Transportation Research, 1971, 5: 257-266. doi: 10.1016/0041-1647(71)90037-2 [29] SUN Zhe, JIN Wen-Long, RITCHIE S G. Simultaneous estimation of states and parameters in Newell's simplified kinematic wave model with Eulerian and Lagrangian traffic data[J]. Transportation Research Part B: Methodological, 2017, 104: 106-122. doi: 10.1016/j.trb.2017.06.012 [30] REYNOLDS D. Gaussian mixture models[J]. Encyc-lopedia of biometrics, 2009, 741: 659-663. -







 点击查看大图
点击查看大图

计量
- 文章访问数: 772
- HTML全文浏览量: 195
- PDF下载量: 74
- 被引次数: 0
