

Research review on cooperative decision-making for vehicle swarms in vehicle-infrastructure cooperative environment
-
摘要: 从车路协同环境下车辆群体协同决策机制、协同决策方法与典型应用场景方面分析了国内外车辆群体协同决策的研究现状;考虑车辆群体协同决策机制的不同,系统梳理了集中式和分布式2种决策机制的相关研究;针对车辆群体协同决策方法的多样性,以基于优化和基于启发式2类决策方法为主线,对比分析了不同决策方法的优劣;考虑车辆群体协同决策应用场景的不同,全面分析了匝道、路口、路段和路网等多个应用场景下车辆群体协同决策的相关理论与研究;考虑国内外车辆协同决策典型项目进展,分别梳理了中国、美国、日本和欧洲代表性车辆群体协同决策项目任务、建设与实施情况;从系统结构、普适模型和示范场景3个方面提出了未来车路协同环境下车辆群体协同决策的发展趋势。研究结果表明:集中式车辆群体协同决策机制有助于提升局部区域内的车辆通行性能,分布式车辆群体协同决策机制有助于提升全局范围内的交通运行状态;基于优化的车辆群体协同决策方法在特定场景下可最大程度提升决策效果,基于启发式的车辆群体协同决策方法在大多数场景下可获得可行的决策效果;由于不同场景下车辆群体协同决策问题的复杂性有所不同,需要在统一框架下做针对性建模。研究结果可为车路协同环境下新型混合交通系统的管理与控制提供参考。Abstract: The research status of cooperative decision-making of vehicle swarms at home and abroad was analyzed from the aspects of mechanisms, methods, and typical application scenarios of cooperative decision-making for vehicle swarms in vehicle-infrastructure cooperative environments. Considering the different cooperative decision-making mechanisms of vehicle swarms, the research on two kinds of decision-making mechanisms, namely the centralized one and the distributed one, was systematically sorted out. Regarding the diversity of cooperative decision-making methods for vehicle swarms, the advantages and disadvantages of different decision-making methods were comparatively analyzed with the optimization-based and heuristics-based decision-making methods as the thread. As for the different application scenarios of cooperative decision-making for vehicle swarms, the theories and research on the cooperative decision-making for vehicle swarms were comprehensively analyzed in various application scenarios, such as ramps, intersections, road sections, and road networks, Concerning the progress of typical projects on the cooperative decision-making for vehicles at home and abroad, the tasks, construction, and implementation of representative projects on the cooperative decision-making for vehicle swarms in China, the United States, Japan, and Europe were sorted out, respectively. The future development trend of cooperative decision-making for vehicle swarms in vehicle-infrastructure cooperative environments was proposed from the three aspects of system structure, universal model, and demonstration scenarios. Research results show that the centralized cooperative decision-making mechanism for vehicle swarms can be employed to improve the vehicle traffic performance in local areas, whereas the distributed cooperative decision-making mechanism for vehicle swarms is conducive to promoting the global traffic operation. The optimization-based cooperative decision-making method for vehicle swarms can maximize the decision-making effect in specific scenarios, while feasible decision-making effects can be obtained by the heuristics-based cooperative decision-making method for vehicle swarms in most scenarios. Due to the different complexities of the cooperative decision-making problem for vehicle swarms in different scenarios, targeted modeling under a unified framework is required. The research results can provide a reference for the management and control of new hybrid traffic systems in vehicle-infrastructure cooperative environments.
-

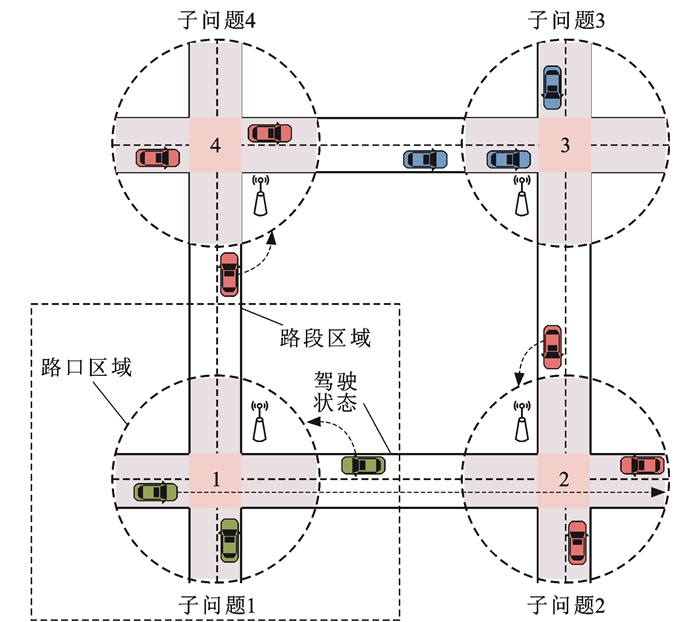
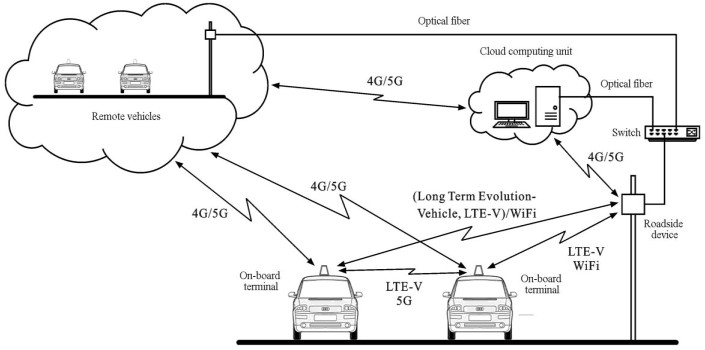
图 1 智能车路协同系统示意
Figure 1. Illustration of intelligent vehicle-infrastructure cooperative system

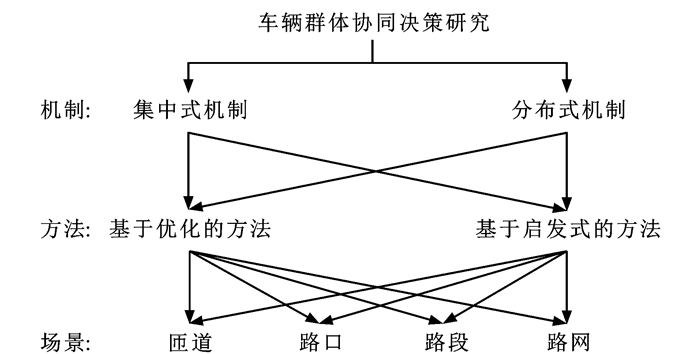
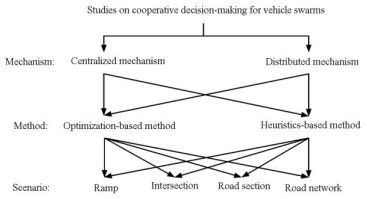
图 2 车辆群体协同决策研究分类
Figure 2. Classification of vehicle swarm cooperative decision-making studies

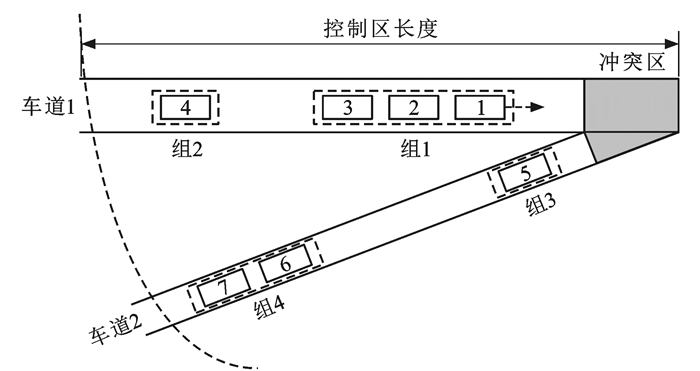
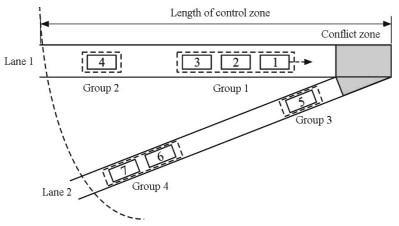
图 3 基于分组的匝道汇流协同决策方法
Figure 3. Grouping-based cooperative decision-making method for ramp confluence

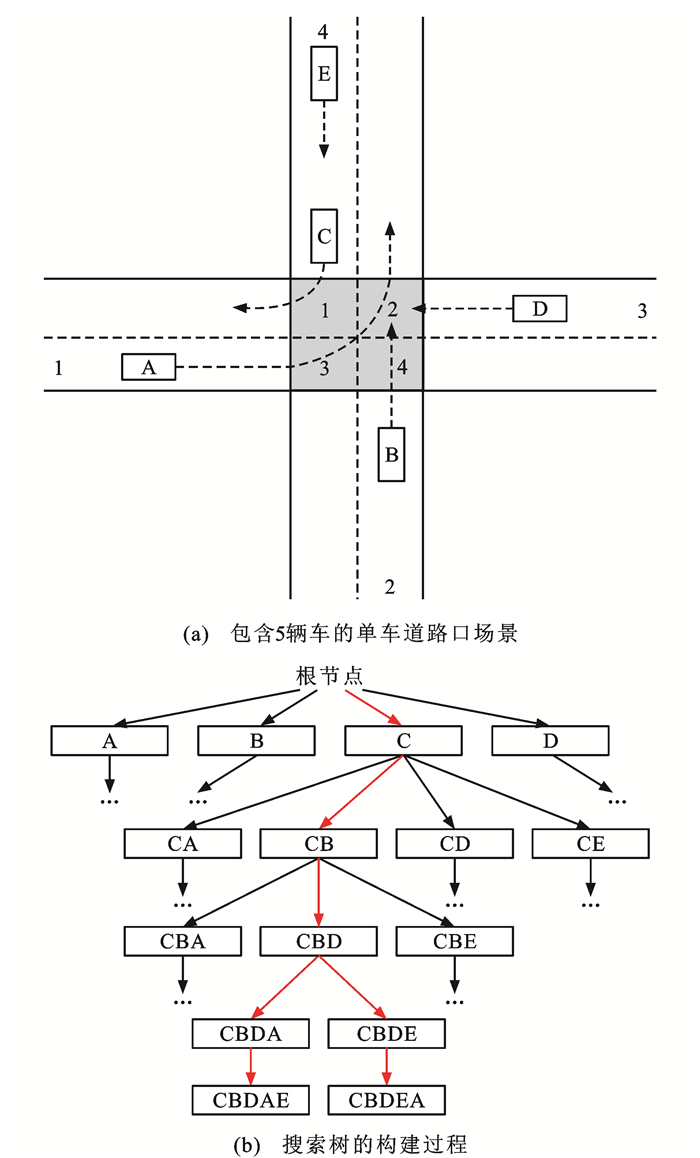
图 4 基于蒙特卡洛树搜索的协同决策方法
Figure 4. Monte Carlo tree search-based cooperative decisionmaking method

图 5 基于双层规划的分布式车辆群体协同决策方法
Figure 5. Bi-level programming-based distributed cooperative decision-making method for vehicle swarms

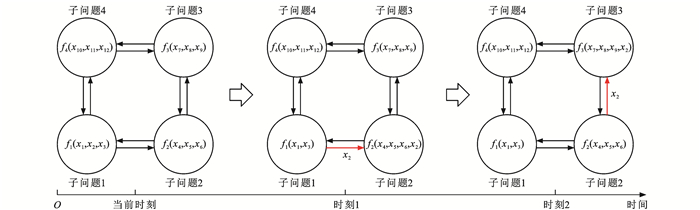
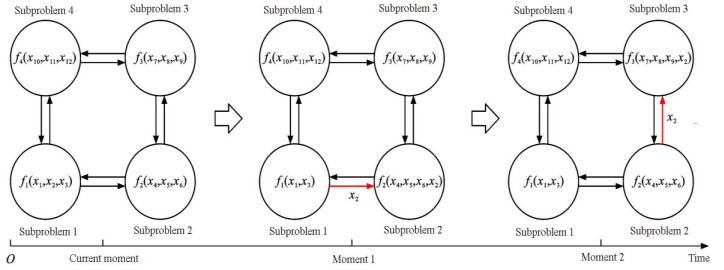
图 6 路网场景下序贯分解策略
Figure 6. Sequential decomposition strategy for road network scenarios

图 7 路网场景下分布式车辆群体协同决策方法
Figure 7. Distributed cooperative decision-making method for vehicle swarms in traffic networks

图 8 车路协同环境下车辆群体协同决策系统结构
Figure 8. System architecture of cooperative decision-making for vehicle swarms in vehicle-infrastructure cooperative environment

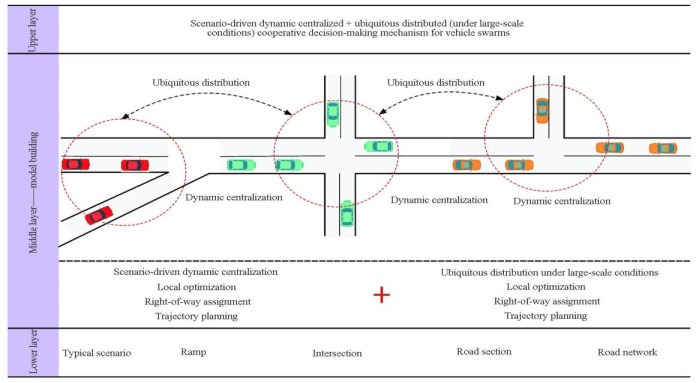
图 9 车辆群体协同决策模型构建技术路线
Figure 9. Technical route of building cooperative decisionmaking model for vehicle swarms

5. Bilayer programming-based distributed cooperative decision-making method for vehicle swarms

7. Distributed cooperative decision-making method for vehicle swarms in traffic networks

8. System architecture of cooperative decision-making for vehicle swarms in vehicle-infrastructure cooperative environment
表 1 基于优化的集中式车辆群体协同决策方法总结
Table 1. Summary of optimization-based centralized cooperative dicision-making methods for vehicle swarms
应用场景 相关文献 决策结果 计算效率 匝道 [3] 以提升交通效率为目标,可获得对应目标函数下的全局最优解 计算时间随车辆数的增多急剧增长 [4] 以提升交通效率为目标,可获得局部最优解 剪枝的方法可降低计算时间,但计算时间复杂度依旧随车辆数的增多急剧增高 [12] 以提升交通效率为目标,可获得对应目标函数下的全局最优解 计算时间复杂度与车辆数呈二次多项式关系,可保证计算实时性 路网 [5]、[6] 以提升交通效率为目标,可获得对应目标函数下的全局最优解 计算时间复杂度随车辆数的增多呈指数型增长 [7] 以提升交通效率为目标,可获得对应目标函数下的全局最优解 剪枝的方法可降低计算时间,但计算时间复杂度依旧随车辆数的增多急剧增长 [13] 以提升交通效率为目标,可获得对应目标函数下的全局最优解 计算时间复杂度与车辆数呈低次多项式关系,可保证计算实时性 [8]~[10] 以提升交通效率为目标,可获得对应目标函数下的全局最优解 计算时间复杂度随车辆数的增多呈指数型增长  下载: 导出CSV
下载: 导出CSV
表 2 基于启发式的集中式车辆群体协同决策方法总结
Table 2. Summary of heuristic-based centralized cooperative decision-making methods for vehicle swarms
应用场景 相关文献 决策结果 计算效率 匝道 [15] 以提升交通效率为目标,可获得局部最优解 计算时间可忽略不计,能保证计算实时性 [23] 以提升交通效率为目标,可获得接近全局最优的解 计算时间较低,可保证计算实时性 路口 [16]~[19] 以提升交通效率为目标,可获得局部最优解 计算时间可忽略不计,能保证计算实时性 [21] 以提升交通效率为目标,解的性能有所提升,但易陷入局部最优解 计算时间较低,可保证计算实时性 [22] 以提升交通效率为目标,在车辆数和车道数较少时,可获得接近全局最优的解 计算时间复杂度与车辆数呈低次多项式关系,可保证计算实时性 [26] 以提升交通效率为目标,可获得接近全局最优的解 计算时间较低,可保证计算实时性 路网 [11] 以提升交通效率为目标,可获得局部最优解 剪枝的方法可降低计算时间,但计算时间复杂度依旧随车辆数的增多急剧增长
下载: 导出CSV
表 3 基于优化的分布式车辆群体协同决策方法总结
Table 3. Summary of optimization-based distributed cooperative decision-making methods for vehicle swarms
下载: 导出CSV
表 4 基于启发式的分布式车辆群体协同决策方法总结
Table 4. Summary of heuristics-based distributed cooperative decision-making methods for vehicle swarms
应用场景 相关研究 决策结果 计算效率 匝道 [36] 可有效消解主路和匝道车辆之间的冲突 可有效降低计算复杂度,保证在线计算 [37] 可保证汇流安全,且在一定程度上提升交通效率 计算时间较少,可保证计算实时性 路口 [38]、[39] 可有效消解主路和匝道车辆之间的冲突,但对交通效率的提升不明显 计算时间较少,可保证计算实时性 路段 [40] 可在横向、纵向2个维度实现车队跟驰,且进行了实车测试 计算时间较少,可保证计算实时性 [41] 可实现路段车辆高效换道 计算时间较少,可保证计算实时性 路网 [42] 可实现车辆安全、稳定行驶,但对交通效率的提升不明显 计算时间较少,可保证计算实时性 [43] 可有效提升交通效率 计算时间较少,可保证计算实时性
下载: 导出CSV
表 5 网联车辆项目研究内容
Table 5. Research contents of connected vehicle projects
领域 完成的主要研究内容和成果 安全 车车通信和车路通信安全技术与应用原型研究,并建立了相关的测试和演示系统;车路协同安全测试环境构建,展示基于DSRC的车辆安全应用;其他通信模式在车路协同系统中应用的分析和研究 政策 制定了技术转让、采购和实施方面的相关政策和解决方案;国家安全系统设计技术和体制模型研究 交通机动性环境和道路气象管理 实时数据的采集和管理方法研究;新一代满足动态交通管理的应用系统开发;能够提供道路与天气信息的新型服务系统开发;面向环保的交通管理方法与技术创新成果研究;车辆数据转换器研究 车路协同下的协同决策 协同决策需要的关键技术和核心内容研发;智能网联环境下实现车路协同的相关标准制定;指定的相关标准纳入国际标准体系范畴
下载: 导出CSV
表 6 车辆群体协同决策示范场景谱
Table 6. Demonstration scenario spectra of cooperative decision-making for vehicle swarms
测试系统分类 应用场景分类 应用功能名称 真实系统 无灯控 主线(路)匝道协同汇流 交叉口(环岛)路口协同通行 路段编队行驶 路段多车协同换道与超车 对面车道借道协同超车 灯控 匝道通行协同控制 路口协同控制通行 超视距感知 周边车辆/路侧设备超视距感知 远端车辆/路侧设备协同感知 自动驾驶车队 恶劣天气情况高速公路安全行驶 自动驾驶车队协同行驶 人驾领航自动驾驶车队协同 虚实结合系统 车辆群体复杂交通 路口灯-车协同控制优化通行 山区道路团雾条件下规模化车辆安全行驶 快速路-灯控路口一体化协同控制 仿真系统 大规模异构混合交通 多交叉口信号灯-车辆节能效率多目标协同控制 城市道路多交叉口干线协同控制 多匝道快速路一体化协同控制 路网车辆路径诱导 快速路智能车辆群体编队控制
下载: 导出CSV
1. Summary of optimization-based centralized cooperative decision-making methods for vehicle swarms

2. Summary of heuristic-based centralized cooperative decision-making methods for vehicle swarms

3. Summary of optimization-based distributed cooperative decision-making methods for vehicle swarms

4. Summary of heuristics-based distributed cooperative decision-making methods for vehicle swarms

5. Research contents of connected vehicle projects

6. Demonstration scenario spectra of cooperative decision-making for vehicle swarms

-
[1] 张毅, 姚丹亚, 李力, 等. 智能车路协同系统关键技术与应用[J]. 交通运输系统工程与信息, 2021, 21(5): 40-51. https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT202105006.htmZHANG Yi, YAO Dan-ya, LI Li, et al. Technologies and applications for intelligent vehicle-infrastructure cooperation systems[J]. Journal of Transportation Systems Engineering and Information Technology, 2021, 21(5): 40-51. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT202105006.htm [2] RIOS-TORRES J, MALIKOPOULOS A A. A survey on the coordination of connected and automated vehicles at intersections and merging at highway on-ramps[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(5): 1066-1077. doi: 10.1109/TITS.2016.2600504 [3] KACHROOP, LI Zhi-jun. Vehicle merging control design for an automated highway system[C]//IEEE. Proceedings of Conference on Intelligent Transportation Systems. New York: IEEE, 1997: 224-229. [4] AWAL T, KULIK L, RAMAMOHANRAO K. Optimal traffic merging strategy for communication- and sensor-enabled vehicles[C]//IEEE. 16th International IEEE Conference on Intelligent Transportation Systems. New York: IEEE, 2013: 1468-1474. [5] MVLLER E R, CARLSON R C, JUNIOR W K. Intersection control for automated vehicles with MILP[J]. IFAC-PapersOnLine, 2016, 49(3): 37-42. doi: 10.1016/j.ifacol.2016.07.007 [6] AHN H, DEL VECCHIO D. Safety verification and control for collision avoidance at road intersections[J]. IEEE Transactions on Automatic Control, 2018, 63(3): 630-642. doi: 10.1109/TAC.2017.2729661 [7] LI Li, WANG Fei-yue. Cooperative driving at blind crossings using intervehicle communication[J]. IEEE Transactions on Vehicular Technology, 2006, 55(6): 1712-1724. doi: 10.1109/TVT.2006.878730 [8] ASHTIANI F, FAYAZI S A, VAHIDI A. Multi-intersection traffic management for autonomous vehicles via distributed mixed integer linear programming[C]//IEEE. 2018 Annual American Control Conference (ACC). New York: IEEE, 2018: 6341-6346. [9] CHALAKI B, MALIKOPOULOS A A. An optimal coordination framework for connected and automated vehicles in two interconnected intersections[C]//IEEE. 2019 IEEE Conference on Control Technology and Applications (CCTA). New York: IEEE, 2019: 888-893. [10] CHALAKI B, MALIKOPOULOS A A. Optimal control of connected and automated vehicles at multiple adjacent intersections[J]. IEEE Transactions on Control Systems Technology, 2022, 30(3): 972-984. doi: 10.1109/TCST.2021.3082306 [11] LI Li, WANG Fei-yue. Cooperative driving at adjacent blind intersections[C]//IEEE. 2005 IEEE International Conference on Systems, Man and Cybernetics. New York: IEEE, 2005: 847-852. [12] PEI Hua-xin, FENG Shuo, ZHANG Yi, et al. A cooperative driving strategy for merging at on-ramps based on dynamic programming[J]. IEEE Transactions on Vehicular Technology, 2019, 68(12): 11646-11656. doi: 10.1109/TVT.2019.2947192 [13] PEI Hua-xin, ZHANG Yu-xiao, ZHANG Yi, et al. Optimal cooperative driving at signal-free intersections with polynomial-time complexity[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, DOI: 10.1109/TITS.2021.3118592. [14] HELD M, KARP R M. A dynamic programming approach to sequencing problems[J]. Journal of the Society for Industrial and Applied Mathematics, 1962, 10(1): 196-210. doi: 10.1137/0110015 [15] SCHMIDT G K, POSCH B. A two-layer control scheme for merging of automated vehicles[C]//IEEE. The 22nd IEEE Conference on Decision and Control. New York: IEEE, 1983: 495-500. [16] DRESNER K, STONE P. Multiagent traffic management: an improved intersection control mechanism[C]//AAMAS. Proceedings of the Fourth International Joint Conference on Autonomous Agents and Multiagent Systems. Utrecht: AAMAS, 2005: 471-477. [17] DRESNER K, STONE P. A multiagent approach to autonomous intersection management[J]. Journal of Artificial Intelligence Research, 2008, 31: 591-656. doi: 10.1613/jair.2502 [18] HUANG Shan, SADEK A W, ZHAO Yun-jie. Assessing the mobility and environmental benefits of reservation-based intelligent intersections using an integrated simulator[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(3): 1201-1214. doi: 10.1109/TITS.2012.2186442 [19] CHOI M, RUBENECIA A, CHOI H H. Reservation-based cooperative traffic management at an intersection of multi-lane roads[C]//IEEE. 2018 International Conference on Information Networking (ICOIN). New York: IEEE, 2018: 456-460. [20] MENG Yue, LI Li, WANG Fei-yue, et al. Analysis of cooperative driving strategies for nonsignalized intersections[J]. IEEE Transactions on Vehicular Technology, 2018, 67(4): 2900-2911. doi: 10.1109/TVT.2017.2780269 [21] CARLINO D, BOYLES S D, STONE P. Auction-based autonomous intersection management[C]//IEEE. 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013). New York: IEEE, 2013: 529-534. [22] ZHANG Yue, CASSANDRAS C G. A decentralized optimal control framework for connected automated vehicles at urban intersections with dynamic resequencing[C]//IEEE. 2018 IEEE Conference on Decision and Control (CDC). New York: IEEE, 2018: 217-222. [23] XU Hui-le, FENG Shuo, ZHANG Yi, et al. A grouping-based cooperative driving strategy for CAVs merging problems[J]. IEEE Transactions on Vehicular Technology, 2019, 68(6): 6125-6136. doi: 10.1109/TVT.2019.2910987 [24] DING Ji-shi-yu, LI Li, PENG H, et al. A rule-based cooperative merging strategy for connected and automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(8): 3436-3446. doi: 10.1109/TITS.2019.2928969 [25] DING Ji-shi-yu, PENG H, ZHANG Y, et al. Penetration effect of connected and automated vehicles on cooperative on-ramp merging[J]. IET Intelligent Transport Systems, 2020, 14(1): 56-64. doi: 10.1049/iet-its.2019.0488 [26] XU Hui-le, ZHANG Yi, LI Li, et al. Cooperative driving at unsignalized intersections using tree search[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(11): 4563-4571. doi: 10.1109/TITS.2019.2940641 [27] SILVER D, VENESS J. Monte-Carlo planning in large POMDPs[C]//LAFFERTY J D, WILLIAMS C K I. Proceedings of the 23rd International Conference on Neural Information Processing Systems Neural Information Processing Systems. New York: Curran Associates Inc, 2010: 2164-2172. [28] CAO Wen-jing, MUKAI M, KAWABE T, et al. Cooperative vehicle path generation during merging using model predictive control with real-time optimization[J]. Control Engineering Practice, 2015, 34: 98-105. doi: 10.1016/j.conengprac.2014.10.005 [29] CAO Wen-jing, MUKAI M, KAWABE T, et al. Gap selection and path generation during merging maneuver of automobile using real-time optimization[J]. SICE Journal of Control, Measurement, and System Integration, 2014, 7(4): 227-236. doi: 10.9746/jcmsi.7.227 [30] ZHANG Yue, CASSANDRAS C G. Decentralized optimal control of connected automated vehicles at signal-free intersections including comfort-constrained turns and safety guarantees[J]. Automatica, 2019, 109: 108563. doi: 10.1016/j.automatica.2019.108563 [31] ZHANG Y J, MALIKOPOULOS A A, CASSANDRAS C G. Optimal control and coordination of connected and automated vehicles at urban traffic intersections[C]//IEEE. 2016 American Control Conference (ACC). New York: IEEE, 2016: 6227-6232. [32] DUNBAR W B, CAVENEY D S. Distributed receding horizon control of vehicle platoons: stability and string stability[J]. IEEE Transactions on Automatic Control, 2012, 57(3): 620-633. doi: 10.1109/TAC.2011.2159651 [33] FENG Shuo, SUN Hao-wei, ZHANG Yi, et al. Tube-based discrete controller design for vehicle platoons subject to disturbances and saturation constraints[J]. IEEE Transactions on Control Systems Technology, 2020, 28(3): 1066-1073. doi: 10.1109/TCST.2019.2896539 [34] MAHBUB A M I, MALIKOPOULOS A A, ZHAO Liu-hui. Decentralized optimal coordination of connected and automated vehicles for multiple traffic scenarios[J]. Automatica, 2020, 117: 108958. doi: 10.1016/j.automatica.2020.108958 [35] WANG Yun-peng, CAI Pin-long, LU Guang-quan. Cooperative autonomous traffic organization method for connected automated vehicles in multi-intersection road networks[J]. Transportation Research Part C: Emerging Technologies, 2020, 111: 458-476. doi: 10.1016/j.trc.2019.12.018 [36] UNO A, SAKAGUCHI T, TSUGAWA S. A merging control algorithm based on inter-vehicle communication[C]//IEEE. Proceedings 199 IEEE/IEEJ/JSAI International Conference on Intelligent Transportation Systems. New York: IEEE, 1999: 783-787. [37] NTOUSAKIS I A, PORFYRI K, NIKOLOS I K, et al. Assessing the impact of a cooperative merging system on highway traffic using a microscopic flow simulator[C]//ASME. Proceedings of the ASME 2014 International Mechanical Engineering Congress and Exposition. New York: ASME, 2014: 39850. [38] LIU Chang-liu, LIN C W, SHIRAISHI S, et al. Distributed conflict resolution for connected autonomous vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2018, 3(1): 18-29. doi: 10.1109/TIV.2017.2788209 [39] XU Biao, LI S B E, BIAN You-gang, et al. Distributed conflict-free cooperation for multiple connected vehicles at unsignalized intersections[J]. Transportation Research Part C: Emerging Technologies, 2018, 93: 322-334. doi: 10.1016/j.trc.2018.06.004 [40] DING Ji-shi-you, PEI Hua-xin, HU Jian-ming, et al. Cooperative adaptive cruise control in vehicle platoon under environment of i-VICS[C]//IEEE. 2018 21st International Conference on Intelligent Transportation Systems (ITSC). New York: IEEE, 2018: 1246-1251. [41] XU Hui-le, ZHANG Yi, CASSANDRAS C G, et al. A bi-level cooperative driving strategy allowing lane changes[J]. Transportation Research Part C: Emerging Technologies, 2020, 120: 102773. doi: 10.1016/j.trc.2020.102773 [42] HAUSKNECHT M, AU T C, STONE P. Autonomous intersection management: multi-intersection optimization[C]// IEEE. 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. New York: IEEE, 2011: 4581-4586. [43] PEI Hua-xin, ZHANG Yi, TAO Qing-hua, et al. Distributed cooperative driving in multi-intersection road networks[J]. IEEE Transactions on Vehicular Technology, 2021, 70(6): 5390-5403. doi: 10.1109/TVT.2021.3079272 [44] KANAZAWA F, KANOSHIMA H, SAKAI K, et al. Field operational tests of Smartway in Japan[J]. IATSS Research, 2010, 34(1): 31-34. doi: 10.1016/j.iatssr.2010.07.001 [45] FUKUSHIMA M, KAMATA K, TSUKADA N. Progress of V-I cooperative safety support system, DSSS, in Japan—DSSS: driving safety support systems using IR beacon[C]//TRB. 16th ITS World Congress and Exhibition on Intelligent Transport Systems and Services. Washington DC: TRB, 2009: 01150500. [46] PIAO J, MCDONALD M, HOUNSELL N. Cooperative vehicle- infrastructure systems for improving driver information services: an analysis of COOPERS test results[J]. IET Intelligent Transport Systems, 2012, 6(1): 9-17. doi: 10.1049/iet-its.2010.0169 [47] CHEN Xiao-bo, YAO Dan-ya, ZHANG Yi, et al. Design and implementation of cooperative vehicle and infrastructure system based on IEEE 802.11n[J]. Transportation Research Record, 2011(2243): 158-166. [48] ZHANG Jia-wei, PEI Hua-xin, BAN Xue-gang, et al. Analysis of cooperative driving strategies at road network level with macroscopic fundamental diagram[J]. Transportation Research Part C: Emerging Technologies, 2022, 135: 103503. [49] XU Hui-le, CASSANDRAS C G, LI Li, et al. Comparison of cooperative driving strategies for CAVs at signal-free intersections[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, DOI: 10.1109/TITS.2021.3071456. [50] PEI Hua-xin, ZHANG Jia-wei, ZHANG Yi, et al. Fault-tolerant cooperative driving at signal-free intersections[J]. IEEE Transactions on Intelligent Vehicles, 2022, DOI: 10.1109/TIV. 2022.3159088. -







 点击查看大图
点击查看大图

计量
- 文章访问数: 3350
- HTML全文浏览量: 720
- PDF下载量: 715
- 被引次数: 0
