

Research review on simulation and test of mixed traffic swarm in vehicle-infrastructure cooperative environment
-
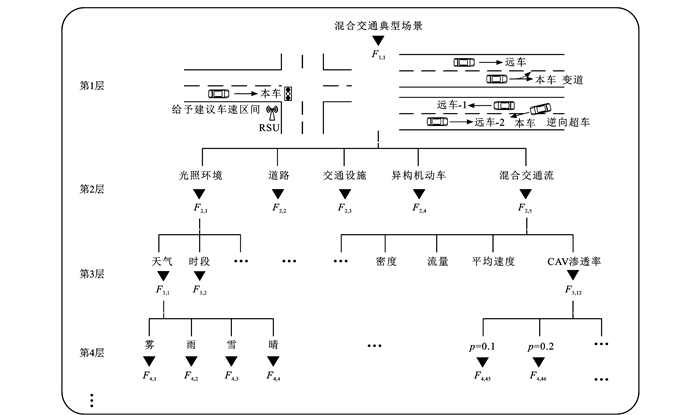
摘要: 归纳了车路协同及其仿真测试技术的发展历程,并结合典型仿真结果探讨了萌芽期、起步期、发展期阶段下的仿真需求、经典方法与技术瓶颈;在此基础上,提出了基于交通主体建模、群体行为仿真、测试结果分析的3层新型虚实交互仿真测试架构;针对混合交通主体仿真需求构建了异构交通主体模型,解析了混合交通运行机理,以此作为仿真系统底层模型支撑;结合设计的虚实交互仿真测试架构,突破了混合交通群体智能场景生成技术,提出了混合交通群体智能仿真方法;在此基础上,选取交叉口和路段典型交通场景,开展了不同群体智能决策控制方法的仿真试验,以验证所提方法的效能;最后,总结了车路协同的未来发展方向和相关建议。研究结果表明:相比于传统仿真测试方法,提出的虚实交互仿真测试方法的系统仿真粒度从500 ms减小到100 ms以内,仿真规模从9个节点和500个交通主体提升到150个节点和2 000个交通主体,仿真场景数量由36个扩展到98个,实现了异构交通主体渗透率0~100%动态可调,有效提高了车路协同混合交通仿真测试的效率、规模和覆盖度;目前新型混合交通环境下车路协同仿真测试需求快速朝着群体化、智能化、规模化演变,开展基于虚实交互和运行环境数据模拟的车路协同群体智能仿真测试方法技术研究,将有力推动下一代智能交通系统的发展。Abstract: The developments of vehicle-infrastructure cooperation and corresponding simulation and test technologies were summarized, and the simulation requirements, classical methods, and technical bottlenecks in the rudiment, infancy, and developing stages were discussed with a focus on the typical simulation results. A new three-layer virtual-real interactive simulation and test framework was proposed based on the traffic subject modeling, swarm behavior simulation, and test result analysis. According to the simulation requirements of mixed traffic subjects, a model for the heterogeneous traffic subjects was constructed, and the operation mechanism of mixed traffic was analyzed to serve as the underlying model support for the simulation system. With the designed virtual-real interactive simulation and test framework, breakthroughs were accomplished in the scenario generation technology for the mixed traffic swarm intelligence, and a simulation method for the mixed traffic swarm intelligence was put forward. Then, simulation tests of decision-making and control methods for different swarm intelligences were carried out in the selected typical traffic scenarios, such as intersections and road sections, to verify the effectiveness of the proposed method. Finally, the future development directions of vehicle-infrastructure cooperation and corresponding suggestions were summarized. Research results show that show that compared with the traditional simulation and test method, the proposed virtual-real interactive simulation and test method reduces the system's simulation granularity from 500 ms to less than 100 ms, the simulation scale increases from 9 nodes and 500 traffic subjects to 150 nodes and 2 000 traffic subjects, and the number of simulated scenarios enhances from 36 to 98. The dynamic adjustment within a range of 0-100% penetration rate of heterogeneous traffic subjects is achieved, and the efficiency, scale, and coverage of the vehicle-infrastructure cooperative simulation and test of mixed traffic are effectively improved. The requirements of vehicle-infrastructure cooperative simulation and test in the new mixed traffic environment are rapidly evolving towards the larger swarm, higher intelligence, and larger scale. Carrying out research on the method and technology for the simulation and test on the vehicle-infrastructure cooperative swarm intelligence based on the virtual-real interaction and operating environment data simulation will effectively promote the development of the next generation of the intelligent traffic system.
-

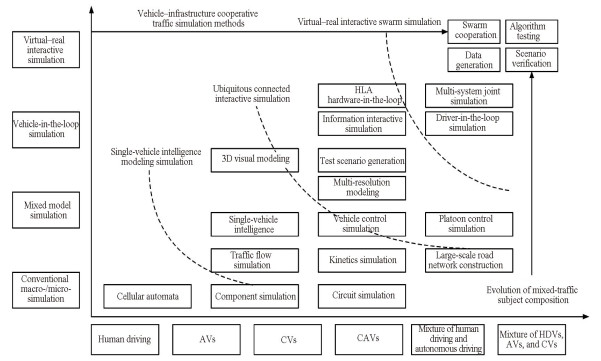
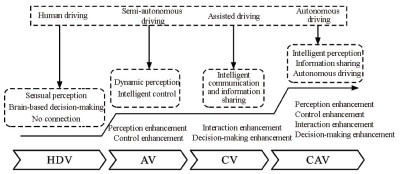
图 1 车路协同群体智能仿真测试发展路线
Figure 1. Development route of vehicle-infrastructure cooperative swarm intelligence simulation and test

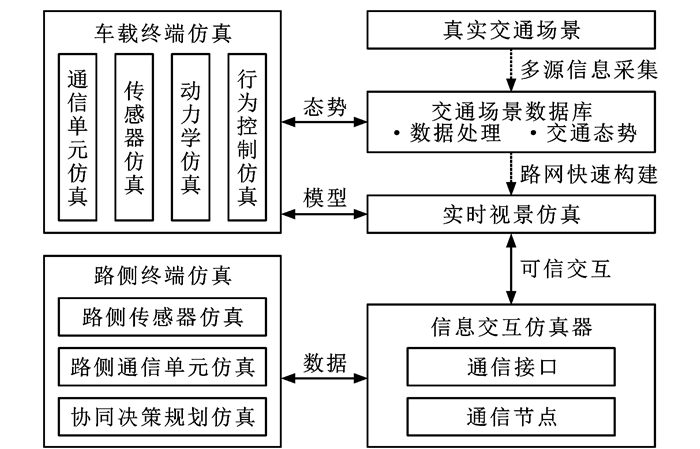
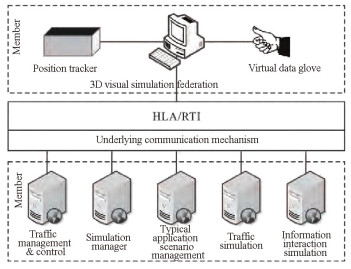
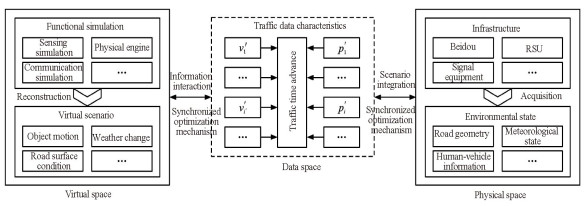
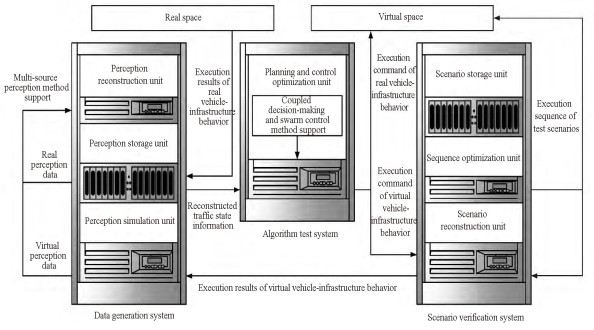
图 3 车路协同视景一体化仿真架构
Figure 3. Visual integrated simulation framework of vehicle-infrastructure cooperation

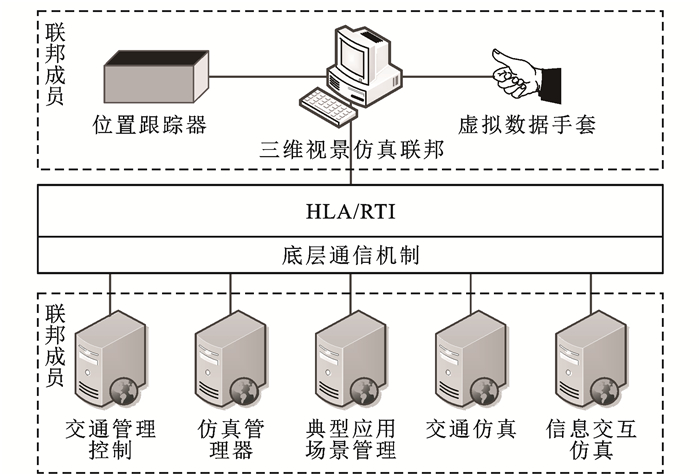
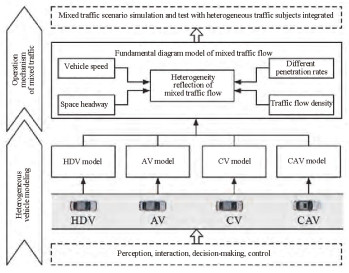
图 6 车路协同视景仿真系统结构
Figure 6. Structure of vehicle-infrastructure cooperative visual simulation system

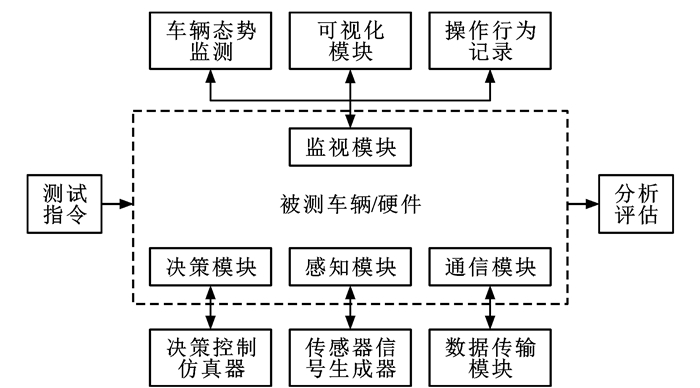
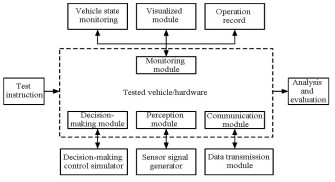
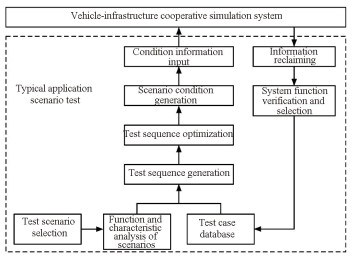
图 7 典型车路协同应用场景下效能测试架构
Figure 7. Performance test framework in typical vehicle-infrastructure cooperative application scenarios

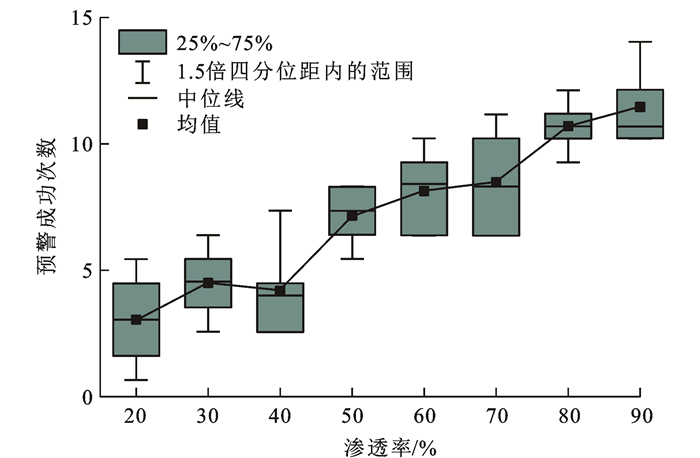
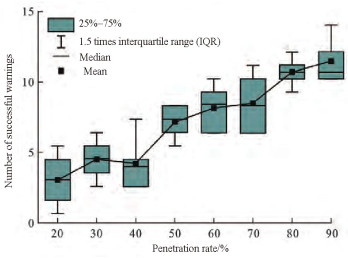
图 8 不同CV渗透率下预警成功统计结果
Figure 8. Statistical results of early warning success under different penetration rates of CV

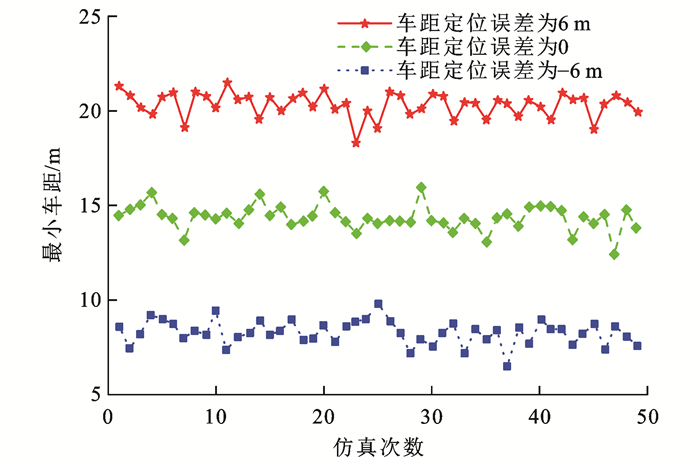
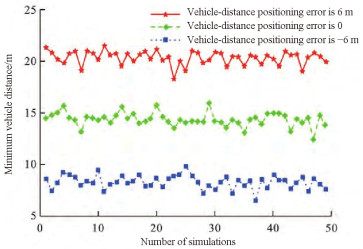
图 9 不同车距定位误差下最小车距统计结果
Figure 9. Statistical results of minimum vehicle distance under different vehicle distance positioning errors

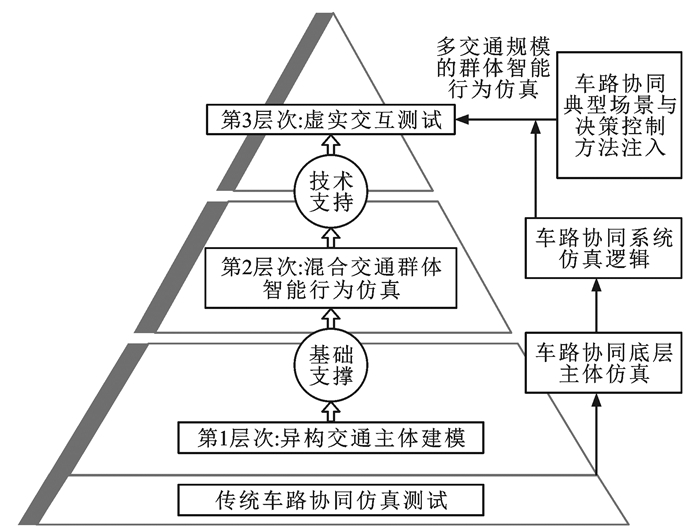
图 10 车路协同群体智能仿真测试技术框架
Figure 10. Vehicle-infrastructure cooperative swarm intelligence simulation and test technology framework

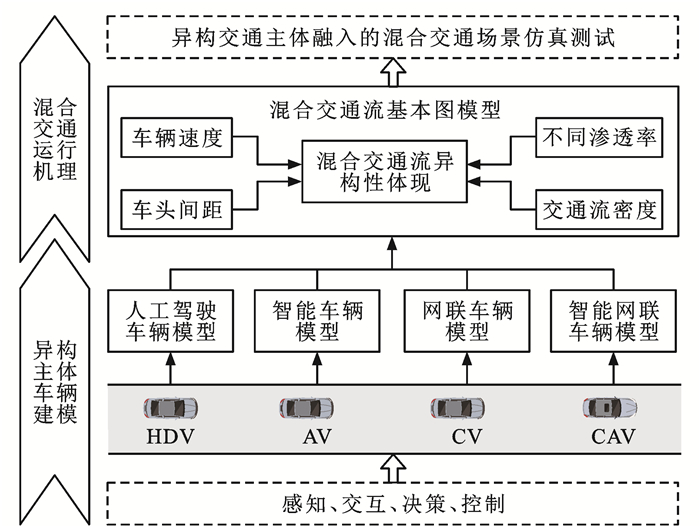
图 11 异构交通群体智能行为仿真框架
Figure 11. Behavior simulation framework for heterogeneous traffic swarm intelligence

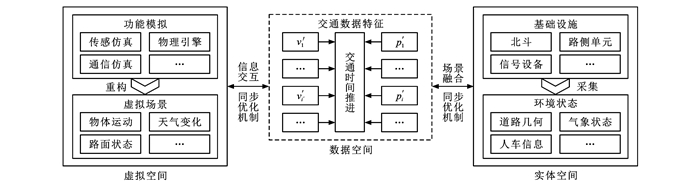
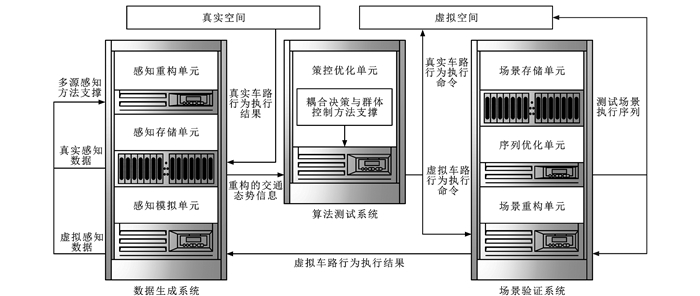
图 14 虚实交互的大规模交通仿真平台框架
Figure 14. Framework of large-scale traffic simulation platform based on virtual-real interaction

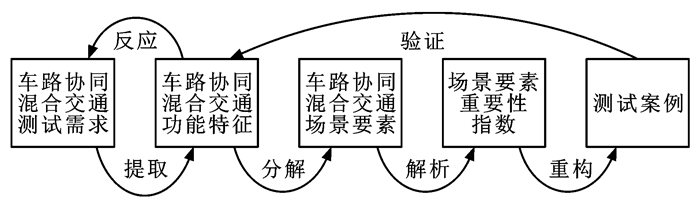
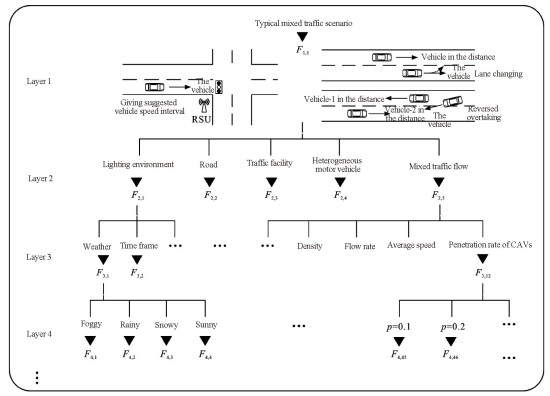
图 18 仿真测试需求与场景案例关系
Figure 18. Relationship between simulation test requirements and scenario cases

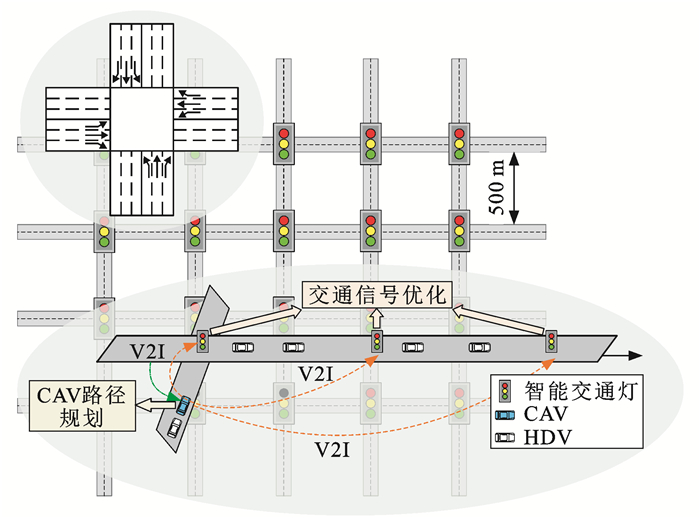
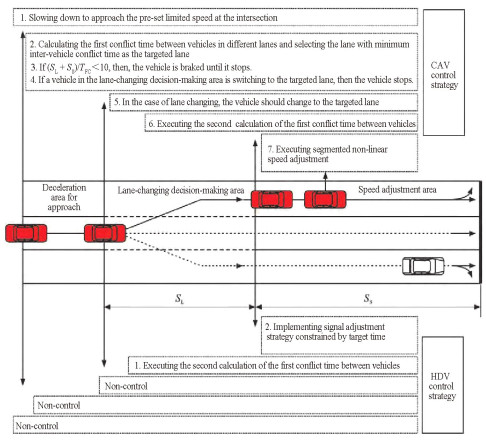
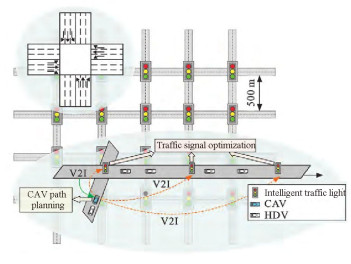
图 20 多交叉口区域协同控制示意
Figure 20. Illustration of multi-intersection area cooperative control

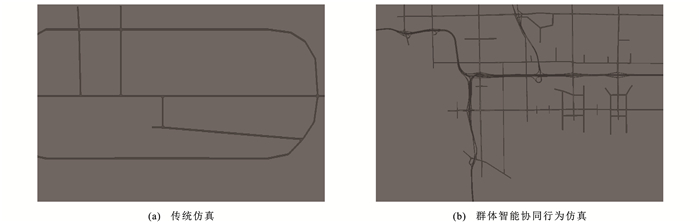
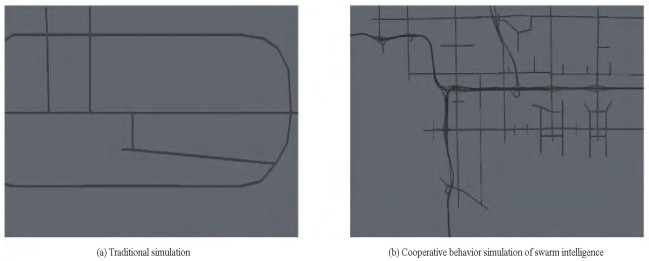
图 22 混合交通群体智能协同行为仿真系统
Figure 22. Cooperative behavior simulation system for mixed traffic swarm intelligence

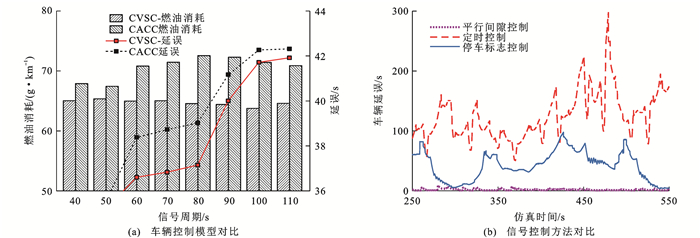
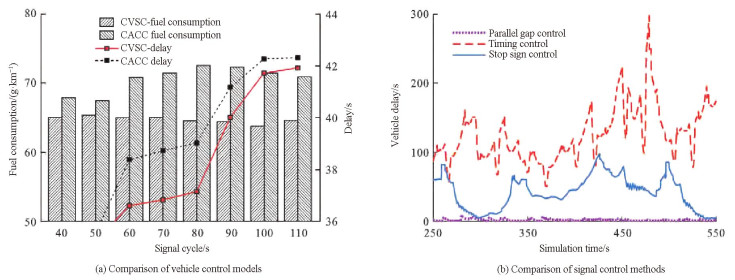
图 24 信号控制周期仿真和通行效率验证
Figure 24. Signal control cycle simulation and traffic efficiency verification

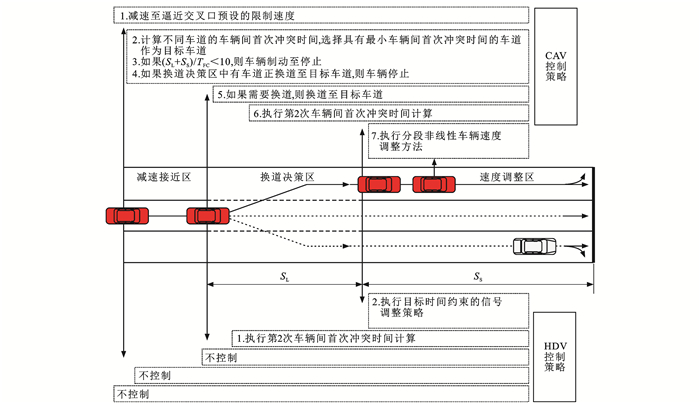
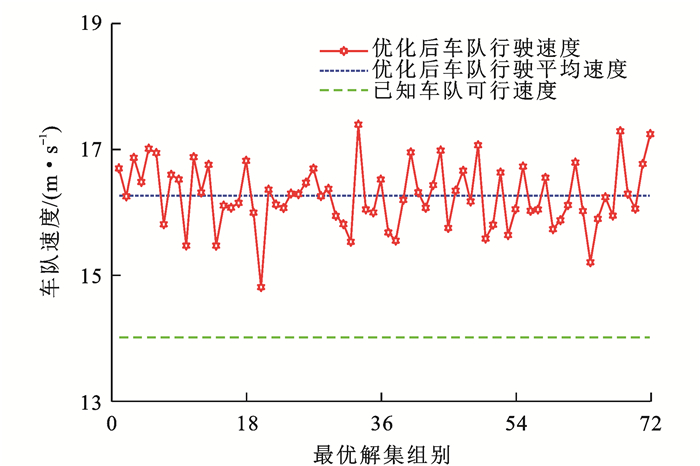
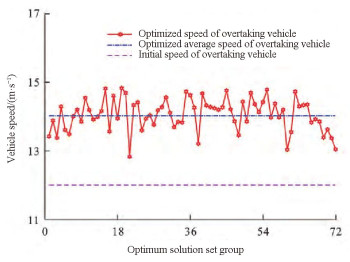
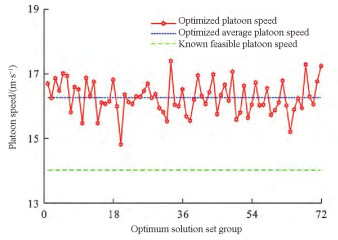
图 25 分步式超车入队车辆的行驶速度
Figure 25. Driving speeds of step-by-step overtaking vehicle entering queue

图 30 不同场景的延时和吞吐量仿真结果
Figure 30. Simulation results of delays and throughputs in different scenarios

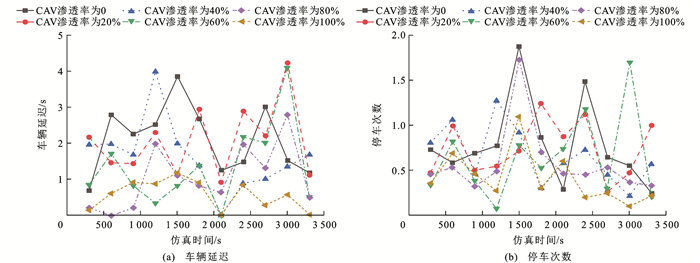
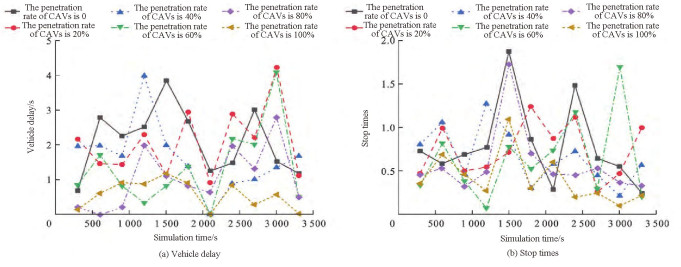
图 31 不同CAV渗透率时车辆延迟和停车次数对比
Figure 31. Comparison of vehicle delays and parking times under different penetralion rates of CAV

1. Development routes of vehicle–infrastructure cooperative swarm intelligence simulation and test

7. Performance test framework in typical vehicle–infrastructure cooperative application scenarios

8. Statistical results of early warning success under different penetration rates of CVs

9. Statistical results of minimum vehicle distance under different vehicle-distance positioning errors

10. Simulation and test technology framework for vehicle–infrastructure cooperative swarm intelligence

14. Framework of large-scale traffic simulation platform based on virtual–real interaction

31. Comparison of vehicle delays and stop times under different penetration rates of CAVs
表 1 车路协同仿真测试需求与特征演化
Table 1. Simulation and test requirements and feature evolution of vehicle-infrastructure cooperation
仿真阶段 仿真手段 仿真对象 典型测试方法/架构 特征 萌芽期 虚拟仿真 交通个体/ 宏观交通流 黑盒测试/ 元胞自动机 低智化个体化 起步期 视景一体化仿真 小规模群体 高层体系架构 智能化分布式 发展期 虚实交互 大规模群体 硬件在环/ 实车在环 群智化规模化  下载: 导出CSV
下载: 导出CSV
表 2 起步期部分车路协同典型应用场景
Table 2. Some typical application scenarios of vehicle-infrastructure cooperation in initial stage
控制模式 场景名称 通信 分类 单车控制 绿波车速引导 V2I 效率 长直路段车路通讯 V2I 服务 限速预警 V2I 安全 多车协同 前向碰撞预警 V2V 安全 盲区预警/变道预警 V2V 安全 协作式变道 V2V 效率
下载: 导出CSV
表 3 异构交通主体模型特征对比
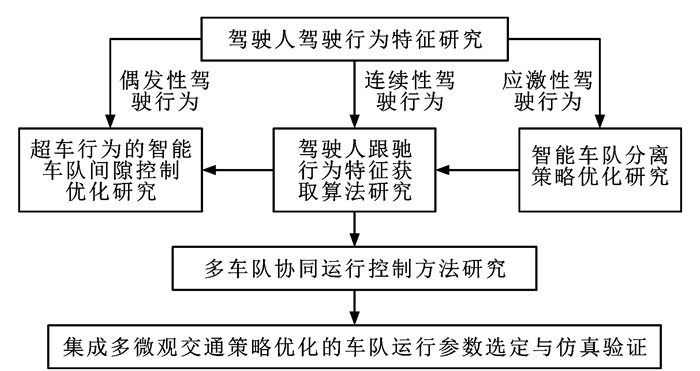
Table 3. Characteristics comparison of heterogeneous traffic subject models
类型 模型输入 反馈形式 模型输出 HDV模型 车头间距、本车/前车速度 非线性 加速度 AV模型 车头间距、本车/前车速度 线性 加速度 CV模型 队列车辆位置、速度、加速度、时延 线性 加速度变化量 CAV模型 车头间距、前车速度、本车速度/加速度 线性 加速度/速度
下载: 导出CSV
表 4 群体混合场景示例
Table 4. Examples of swarm mixed scenarios
场景功能分类 场景功能特征 仿真构建需求 协作式交叉口通行 信号控制交叉口车辆常规通行 安全/效率 信号控制交叉口处理异常停车 安全/效率 交叉口信号自适应控制 效率 交叉口动态车道管理 效率/管理 无信号控制交叉口组织通信异构车辆常规通行 安全/效率 协作式城市快速路匝道控制 城市快速路单匝道控制 安全/效率 城市快速路主线多匝道协同控制 安全/效率 城市快速路与高速公路结合部控制 安全/效率 协作式城市路段控制 城市常规路段组织车辆编队 安全/效率 常规路段组织紧急车辆优先通行 安全/效率
下载: 导出CSV
1. Simulation and test requirements and feature evolution of vehicle–infrastructure cooperation

2. Some typical application scenarios of vehicle–infrastructure cooperation in the rudiment stage

3. Characteristics comparison of heterogeneous traffic subject models

4. Examples of swarm mixed scenarios

-
[1] 张毅, 姚丹亚, 李力, 等. 智能车路协同系统关键技术与应用[J]. 交通运输系统工程与信息, 2021, 21(5): 40-51. https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT202105006.htmZHANG Yi, YAO Dan-ya, LI Li, et al. Technology and application of intelligent vehicle-infrastructure cooperation systems[J]. Journal of Transportation Systems Engineering and Information Technology, 2021, 21(5): 40-51. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT202105006.htm [2] 田彬, 赵祥模, 徐志刚, 等. 车路协同条件下智能网联高速公路通行效率信息自适应分发协议: NRT-V2X[J]. 中国公路学报, 2019, 32(6): 293-307. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906030.htmTIAN Bin, ZHAO Xiang-mo, XU Zhi-gang, et al. NRT-V2X: adaptive data dissemination protocol for traffic efficiency of connected and automated highways[J]. China Journal of Highway and Transport, 2019, 32(6): 293-307. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906030.htm [3] PETTY K F, NOEIMI H, SANWAL K, et al. The freeway service patrol evaluation project: database support programs, and accessibility[J]. Transportation Research Part C: Emerging Technologies, 1996, 4(2): 71-85. doi: 10.1016/0968-090X(96)00001-0 [4] HIROSHIMA Y. Development of collision danger reasoning algorithm, Part 5: the basic technology for ASV (advanced safety vehicle)[J]. JSAE Review, 1995, 16(1): 221-224. [5] FUKUSHIMA M. The latest trend of V2X driver assistance systems in Japan[J]. Computer Networks, 2011, 55(14): 3134-3141. doi: 10.1016/j.comnet.2011.03.012 [6] WEIB C. V2X communication in Europe—from research projects towards standardization and field testing of vehicle communication technology[J]. Computer Networks, 2011, 55(14): 3103-3119. doi: 10.1016/j.comnet.2011.03.016 [7] 邹智军, 杨东援. 动态交通状态微观仿真技术初探[J]. 同济大学学报(自然科学版), 1999, 27(3): 305-308. https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ199903011.htmZOU Zhi-jun, YANG Dong-yuan. Preliminary study on dynamic traffic microsimulation[J]. Journal of Tongji University (Natural Science), 1999, 27(3): 305-308. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ199903011.htm [8] CHUNG-MAN HO C M, GENTLE J E. A comparison of clock pulse and event algorithms for simulation of traffic flow[J]. ACM SIGSIM Simulation Digest, 1976, 8(1): 53-55. doi: 10.1145/1103189.1103204 [9] WADA S, HAYAKAWA H. Kink solution in a fluid model of traffic flow[J]. Journal of the Physical Society of Japan, 1998, 67(3): 763-766. doi: 10.1143/JPSJ.67.763 [10] DEL CASTILLO J M, PINTADO P, BENITEZ F G. The reaction-time of drivers and the stability of traffic flow[J]. Transportation Research Part B: Methodological, 1994, 28(1): 35-60. doi: 10.1016/0191-2615(94)90030-2 [11] PAPAGEORGIOU M. Some remarks on macroscopic traffic flow modelling[J]. Transportation Research Part A: Policy and Practice, 1998, 32(5): 323-329. doi: 10.1016/S0965-8564(97)00048-7 [12] DANIŠOVIČ P, JANČAŘÍKOVÁ E, ŠRÁMEK J, et al. Fire spread models and tunnel traffic & operation simulator[J]. Procedia Engineering, 2017, 19(2): 92-95. [13] KRONJÄGER W, KONHÄUSER P. Applied traffic flow simulation[J]. IFAC Proceedings Volumes, 1997, 30(8): 777-780. doi: 10.1016/S1474-6670(17)43916-4 [14] PIPES L A. An operational analysis of traffic dynamics[J]. Journal of Applied Physics, 1953, 24(3): 274-281. doi: 10.1063/1.1721265 [15] FUKUI M, ISHIBASH Y. Traffic flow in 1D cellular automaton model including cars moving with high speed[J]. Journal of the Physical Society of Japan, 1996, 65(6): 1868-1870. doi: 10.1143/JPSJ.65.1868 [16] KRAUSS, WAGNER P, GAWRON C. Metastable states in a microscopic model of traffic flow[J]. Physical Review E, 1997, 55(5): 5597-5602. doi: 10.1103/PhysRevE.55.5597 [17] BARLOVIC R, SANTEN L, SCHADSCHNEIDER A, et al. Metastable states in cellular automata for traffic flow[J]. The European Physical Journal B—Condensed Matter and Complex Systems, 1998, 5(3): 793-800. doi: 10.1007/s100510050504 [18] WONG S C, WONG W T, LEUNG C M, et al. Group-based optimization of a time-dependent TRANSYT traffic model for area traffic control[J]. Transportation Research Part B: Methodological, 2002, 36(4): 291-312. doi: 10.1016/S0191-2615(01)00004-2 [19] PARK B B, SCHNEEBERGER J D. Microscopic simulation model calibration and validation: case study of VISSIM simulation model for a coordinated actuated signal system[J]. Transportation Research Record, 2003(1856): 185-192. [20] KARAGIANNIS G, ALTINTAS O, EKICI E, et al. Vehicular networking: a survey and tutorial on requirements, architectures, challenges, standards and solutions[J]. IEEE Communications Surveys and Tutorials, 2011, 13(4): 584-616. doi: 10.1109/SURV.2011.061411.00019 [21] MANIVANNAN P V, RAMAKANTH P. Vision based intelligent vehicle steering control using single camera for automated highway system[J]. Procedia Computer Science, 2018, 133: 839-846. doi: 10.1016/j.procs.2018.07.111 [22] VIVO G, DALMASSO P, VERNACCHIA F. The European Integrated Project "SAFESPOT"—How ADAS applications co-operate for the driving safety[C]//IEEE. 2007 IEEE Intelligent Transportation Systems Conference. New York: IEEE, 2007: 534-539. [23] SIKDAR B. Comparison of broadcasting schemes for infrastructure to vehicular communications[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(2): 492-502. doi: 10.1109/TITS.2011.2182193 [24] 张含, 蔡伯根, 上官伟, 等. 基于多分辨率建模的车路协同系统仿真场景设计与实现[J]. 系统仿真技术, 2013, 9(1): 52-60. https://www.cnki.com.cn/Article/CJFDTOTAL-XTFJ201301010.htmZHANG Han, CAI Bai-gen, SHANGGUAN Wei, et al. MR-based CVIS scenario design and implementation[J]. System Simulation Technology, 2013, 9(1): 52-60. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XTFJ201301010.htm [25] GIPPS P G. A behavioural car-following model for computer simulation[J]. Transportation Research Part B: Methodological, 1981, 15(2): 105-111. doi: 10.1016/0191-2615(81)90037-0 [26] PETROV P, NASHASHIBI F. Modeling and nonlinear adaptive control for autonomous vehicle overtaking[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(4): 1643-1656. doi: 10.1109/TITS.2014.2303995 [27] BUTAKOV V A, IOANNOU P. Personalized driver/vehicle lane change models for ADAS[J]. IEEE Transactions on Vehicular Technology, 2015, 64(10): 4422-4431. doi: 10.1109/TVT.2014.2369522 [28] 蔡伯根, 王丛丛, 上官伟, 等. 车路协同系统信息交互仿真方法[J]. 交通运输工程学报, 2014, 14(3): 111-119. http://transport.chd.edu.cn/article/id/201403015CAI Bai-gen, WANG Cong-cong, SHANGGUAN Wei, et al. Simulation method of information interaction in CVIS[J]. Journal of Traffic and Transportation Engineering, 2014, 14(3): 111-119. (in Chinese) http://transport.chd.edu.cn/article/id/201403015 [29] TOUTOUH J, GARCÍA-NIETO J, ALBA E. Intelligent OLSR routing protocol optimization for VANETs[J]. IEEE Transactions on Vehicular Technology, 2012, 61(4): 1884-1894. doi: 10.1109/TVT.2012.2188552 [30] KHOKHAR R H, NGADI M A, LATIFF M S, et al. Multi-criteria receiver self-election scheme for optimal packet forwarding in vehicular ad hoc networks[J]. International Journal of Computers Communication and Control, 2014, 7(5): 865. doi: 10.15837/ijccc.2012.5.1342 [31] 周连科, 左德承, 崔刚, 等. 考虑节点交通特性的VANET分簇广播协议[J]. 高技术通讯, 2012(5): 468-476.ZHOU Lian-ke, ZUO De-cheng, CUI Gang, et al. A node-traffic characteristics considered clustering broadcast protocol for VANETs[J]. Chinese High Technology Letters, 2012(5): 468-476. (in Chinese) [32] 李四辉, 蔡伯根, 上官伟, 等. 车路协同系统仿真信息多分辨率交互方法[J]. 交通运输系统工程与信息, 2014, 14(6): 50-57. https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201406008.htmLI Si-hui, CAI Bai-gen, SHANGGUAN Wei, et al. Multi-resolution information exchange method in cooperation vehicle-infrastructure system[J]. Journal of Transportation Systems Engineering and Information Technology, 2014, 14(6): 50-57. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201406008.htm [33] CHENG S T, HORNG G J, CHOU C L. Using cellular automata to form car society in vehicular ad hoc networks[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4): 1374-1384. doi: 10.1109/TITS.2011.2158211 [34] KALRA N, PADDOCK S M. Driving to safety: how many miles of driving would it take to demonstrate autonomous vehicle reliability?[J]. Transportation Research Part A: Policy and Practice, 2016, 94: 182-193. doi: 10.1016/j.tra.2016.09.010 [35] BRIEFS U. Mcity grand opening[J]. Research Review, 2015, 46(3): 1-2. [36] XU Hui-le, ZHANG Yi, LI Li, et al. Cooperative driving at unsignalized intersections using tree search[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(11): 4563-4571. doi: 10.1109/TITS.2019.2940641 [37] GUO Qiang-qiang, BAN Xue-gang. Macroscopic fundamental diagram based perimeter control considering dynamic user equilibrium[J]. Transportation Research Part B: Methodological, 2020, 136: 87-109. doi: 10.1016/j.trb.2020.03.004 [38] GHIASI A, HUSSAIN O, QIAN Zhen, et al. A mixed traffic capacity analysis and lane management model for connected automated vehicles: a Markov chain method[J]. Transportation Research Part B: Methodological, 2017, 106: 266-292. doi: 10.1016/j.trb.2017.09.022 [39] YANG Chao, LOU Wei, LIU Yi, et al. Resource allocation for edge computing-based vehicle platoon on freeway: a contract-optimization approach[J]. IEEE Transactions on Vehicular Technology, 2020, 69(12): 15988-16000. doi: 10.1109/TVT.2020.3039851 [40] XU Li-wei, ZHUANG Wei-chao, YIN Guo-dong, et al. Energy-oriented cruising strategy design of vehicle platoon considering communication delay and disturbance[J]. Transportation Research Part C: Emerging Technologies, 2019, 107: 34-53. doi: 10.1016/j.trc.2019.07.019 [41] WANG Zhu-wei, GAO Yu, FANG Chao, et al. Optimal control design for connected cruise control with stochastic communication delays[J]. IEEE Transactions on Vehicular Technology, 2020, 69(12): 15357-15369. doi: 10.1109/TVT.2020.3040321 [42] ZHONG Zi-jia, LEE J Y. The effectiveness of managed lane strategies for the near-term deployment of cooperative adaptive cruise control[J]. Transportation Research Part A: Policy and Practice, 2019, 129: 257-270. doi: 10.1016/j.tra.2019.08.015 [43] GE J I, OROSZ G. Connected cruise control among human- driven vehicles: experiment-based parameter estimation and optimal control design[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 445-459. doi: 10.1016/j.trc.2018.07.021 [44] HAO Liu, KAN Xing-an, SHLADOVER S E, et al. Modeling impacts of cooperative adaptive cruise control on mixed traffic flow in multi-lane freeway facilities[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 261-279. doi: 10.1016/j.trc.2018.07.027 [45] ZHANG Lin-jun. Cooperative adaptive cruise control in mixed traffic with selective use of vehicle-to-vehicle communication[J]. IET Intelligent Transport Systems, 2018, 12(10): 1243-1254. doi: 10.1049/iet-its.2018.5235 [46] XIAO Lin, WANG Meng, SCHAKEL W, et al. Unravelling effects of cooperative adaptive cruise control deactivation on traffic flow characteristics at merging bottlenecks[J]. Transportation Research Part C: Emerging Technologies, 2018, 96: 380-397. doi: 10.1016/j.trc.2018.10.008 [47] GONG Si-yuan, DU Li-li. Cooperative platoon control for a mixed traffic flow including human drive vehicles and connected and autonomous vehicles[J]. Transportation Research Part B: Methodological, 2018, 116: 25-61. doi: 10.1016/j.trb.2018.07.005 [48] LIN Gui-hua, HU Yu, ZOU Yuan-yang. A mixed-mode traffic assignment model with new time-flow impedance function[J]. International Journal of Modern Physics B, 2018, 32(3): 173-185. [49] HUANG Dong-dong, CUI Miao, ZHANG Guang-chi, et al. Trajectory optimization and resource allocation for UAV base stations under in-band backhaul constraint[J]. EURASIP Journal on Wireless Communications and Networking, 2020, 2020: 831-845. [50] 柴琳果, 蔡伯根, 上官伟, 等. 联网智能车运动学仿真基础环境构建方法[J]. 华南理工大学学报(自然科学版), 2018, 46(1): 66-77. https://www.cnki.com.cn/Article/CJFDTOTAL-HNLG201801010.htmCHAI Lin-guo, CAI Bai-gen, SHANGGUAN Wei, et al. A construction approach based on kinematic simulation environment for networked intelligent vehicle[J]. Journal of South China University of Technology (Natural Science Edition), 2018, 46(1): 66-77. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HNLG201801010.htm [51] CHAI Lin-guo, CAI Bai-gen, SHANGGUAN Wei, et al. Connected and autonomous vehicles coordinating approach at intersection based on space-time slot[J]. Transportmetrica A: Transport Science, 2018, 14(10): 929-951. doi: 10.1080/23249935.2018.1452308 [52] 陈俊杰, 蔡伯根, 上官伟, 等. 双向双车道超车行为的智能车队间隙控制优化[J]. 交通运输工程学报, 2019, 19(2): 178-190. http://transport.chd.edu.cn/article/id/201902016CHEN Jun-jie, CAI Bai-gen, SHANGGUAN Wei, et al. Slot control optimization of intelligent platoon for dual-lane two-way overtaking behavior[J]. Journal of Traffic and Transportation Engineering, 2019, 19(2): 178-190. (in Chinese) http://transport.chd.edu.cn/article/id/201902016 [53] FENG Yi-heng, YU Chun-hui, XU Shao-bing, et al. An augmented reality environment for connected and automated vehicle testing and evaluation[C]//IEEE. 2018 IEEE Intelligent Vehicles Symposium (IV). New York: IEEE, 2018: 1549-1554. [54] QIU Wei-zhi, SHANGGUAN Wei, CAI Bai-gen, et al. Advance estimate-based traffic state synchronization for parallel testing[C]//IEEE. 2020 IEEE 23rd International Conference on Intelligent Transportation System. New York: IEEE, 2020: 1-6. [55] QIU Wei-zhi, SHANGGUAN Wei, CHAI Lin-guo, et al. Parallel hierarchical control-based efficiency enhancement for large-scale virtual reality traffic simulation[J]. IEEE Intelligent Transportation Systems Magazine, 2021, DOI: 10.1109/MITS.2021.3051473. [56] LI Li, WANG Xiao, WANG Kun-feng, et al. Parallel testing of vehicle intelligence via virtual-real interaction[J]. Science Robotics, 2019, 4(28): 4106. doi: 10.1126/scirobotics.aaw4106 -
















 点击查看大图
点击查看大图

计量
- 文章访问数: 3142
- HTML全文浏览量: 760
- PDF下载量: 419
- 被引次数: 0
