

Guidance and cooperative operation method for group vehicles in vehicle-infrastructure cooperative environment
-
摘要: 为解决城市发展带来的交通拥堵问题,发掘道路交通的潜力,提高车路协同环境下车辆在路网中的行驶效率,面向群体车辆提出了一种诱导优化方法和协同控制策略;在车辆诱导分配方面,在起始点和目的地之间的可达路径中,以交通效率最优、车辆排放最小为目标,设计了基于道路饱和度、车辆行程时间和延误的群体车辆分配规则,建立了群体车辆诱导分配优化模型,并用多目标非支配排序遗传算法-Ⅱ(NSGA-Ⅱ)和多目标粒子群优化算法进行求解;在车辆协同运行控制策略方面,基于引力场思想建立了多车协同运行模型,并提出了多车协同加减速策略;通过仿真验证比较了不同网联自动驾驶车辆(CAV)渗透率下的车辆诱导优化结果,同时仿真了车辆协同加减速策略,并将诱导优化方法和协同控制策略进行了联合仿真。仿真结果表明:多目标诱导分配方法可以提升车辆速度和环境效益,且群体车辆平均速度与CAV渗透率正相关;在四车组队行驶环境中,车辆协同加减速策略能够将车辆在加速和减速时的初始平均加速度分别提高15.0%和8.2%,让车辆快速达到目标速度,保障行车安全;在联合仿真环境中,路网群体车辆的加速度平均提高了11.6%,速度平均提高了1.6%,碳氧化合物排放量减少约4.9%。由此可见,提出的方法能够提高路网通行效率,降低车辆能源消耗,减少对环境造成的不良影响。Abstract: To solve the traffic congestion problem caused by urban development, explore the potential of road traffic, and improve the driving efficiency of vehicles in the road network in vehicle-infrastructure cooperative environments, a guidance optimization method and a cooperative contral strategy for group vehicles were proposed. For the vehicle guidance allocation, the group vehicles allocation rules based on the road saturation, vehicle travel time, and delay were designed with the goals of optimal traffic efficiency and minimum vehicle emissions by the feasible path between the starting point and the destination. An optimization model for the group vehicles guidance allocation was built and solved by the multi-objective non-dominated sorting genetic algorithms-Ⅱ (NSGA-Ⅱ) and the multi-objective particle swarm optimization algorithm. Regarding the strategy for the vehicle cooperative operation control, a multi-vehicle cooperative operation model based on the idea of the gravitational field was created, and a multi-vehicle cooperative acceleration and deceleration strategy was proposed. The results of vehicle guidance optimization under different penetration rates of connected and automated vehicle (CAV) were compared through the simulation verification. The vehicle cooperative acceleration and deceleration strategy was simulated, and the guidance optimization method and the cooperative control strategy were co-simulated. Simulation results show that the multi-objective guidance allocation method can improve the vehicle speed and environmental benefits, and the average speed of the group vehicles is positively correlated with the CAV penetration rate. In the four-car group driving environment, the cooperative acceleration and deceleration strategy can increase the initial average acceleration of the vehicle by 15.0% and 8.2% respectively, during the acceleration and deceleration. The vehicle can quickly reach the target speed, and the safety of the vehicles can thereby be ensured. In the co-simulation environment, the accelerations of the group vehicles in the road network increase by 11.6% on average, their speeds increase by 1.6% on average, and their carbon-oxygen compound emissions reduce by about 4.9%. Therefore, the proposed method can be employed to improve the traffic efficiency of the road network, reduce the energy consumption of vehicles, and lower the adverse impact on the environment. 2 tabs, 10 figs, 31 refs.
-

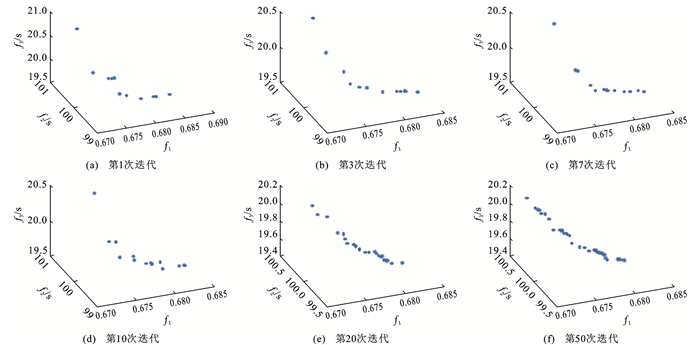
图 5 多目标粒子群优化算法帕累托前沿
Figure 5. Pareto fronts of multi-objective particle swarm optimization algorithm

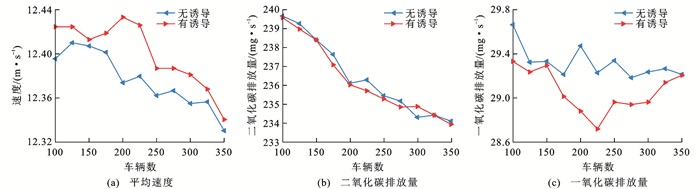
图 6 诱导前后车辆的平均速度、二氧化碳排放量、一氧化碳排放量对比
Figure 6. Comparison of vehicle average speeds, carbon dioxide emissions and carbon monoxide emissions before and after guidance

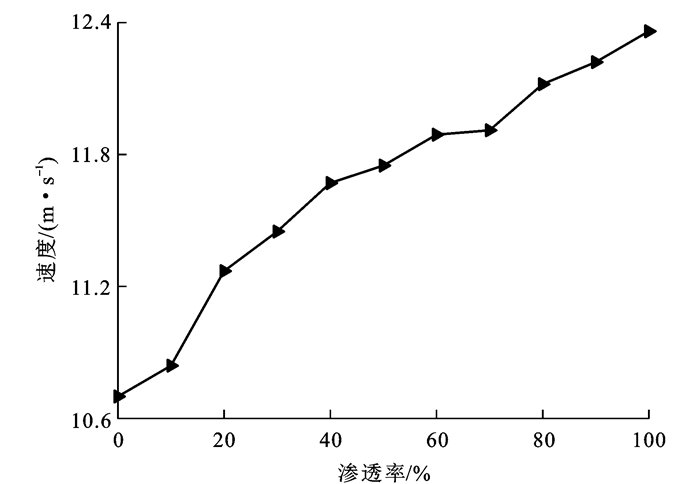
图 7 不同CAV渗透率条件下200辆车的平均速度
Figure 7. Average speeds of 200 vehicles with different CAV penetration rates

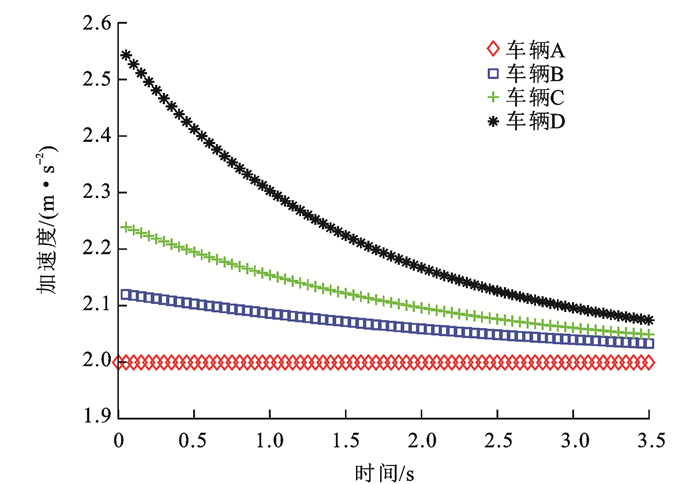
图 8 车辆协同加速运行的加速度对比
Figure 8. Acceleration comparison of vehicle cooperative acceleration operation

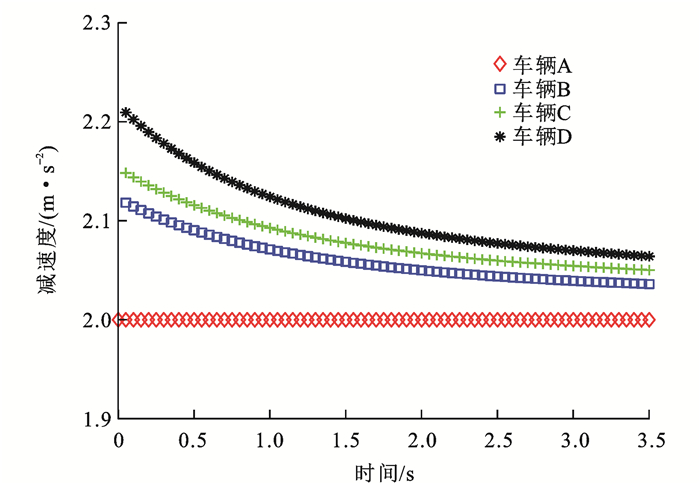
图 9 车辆协同减速运行的减速度对比
Figure 9. Deceleration comparison of vehicle cooperative deceleration operation
表 1 道路拥挤程度和服务水平
Table 1. Road congestion and service levels
服务水平 S 拥挤程度 一级 (0, 0.6] 顺畅 二级 (0.6, 0.8] 轻微拥堵 三级 (0.8, 1.0] 拥堵 四级 >1.0 严重拥堵  下载: 导出CSV
下载: 导出CSV
表 2 路径组成
Table 2. Path compositions
路径标号 路径组成 1 1-2-3-6-9 2 1-2-5-6-9 3 1-4-5-6-9 4 1-4-7-6-9 5 1-4-7-8-9
下载: 导出CSV
-
[1] 何胜学. 基于两阶段行程时间的交通流分配理论[J]. 交通运输系统工程与信息, 2018, 18(1): 139-144. https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201801022.htmHE Sheng-xue. Traffic assignment theory based on two-stage travel time[J]. Journal of Transportation Systems Engineering and Information Technology, 2018, 18 (1): 139-144. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201801022.htm [2] 王洪德, 曹英浩, 崔铁军, 等. 基于时间递推与有师学习的交通路径动态诱导[J]. 中国公路学报, 2014, 27(1): 94-99. doi: 10.3969/j.issn.1001-7372.2014.01.013WANG Hong-de, CAO Ying-hao, CUI Tie-jun, et al. Traffic route dynamic guidance based on time recursion and supervised learning[J]. China Journal of Highway and Transport, 2014, 27(1): 94-99. (in Chinese) doi: 10.3969/j.issn.1001-7372.2014.01.013 [3] 张建旭, 蒋燕. 基于局部路网交通流重分配的路段关键度计算[J]. 交通运输系统工程与信息, 2016, 16(1): 105-110. doi: 10.3969/j.issn.1009-6744.2016.01.017ZHANG Jian-xu, JIANG Yan. Criticality calculation of road links based on local network traffic flow redistribution[J]. Journal of Transportation Systems Engineering and Information Technology, 2016, 16(1): 105-110. (in Chinese) doi: 10.3969/j.issn.1009-6744.2016.01.017 [4] 徐旭, 郑伟舜. 蚁群算法下交通流分配对路网结构可靠度的影响[J]. 重庆交通大学学报(自然科学版), 2017, 36(5): 91-97, 120. doi: 10.3969/j.issn.1674-0696.2017.05.16XU Xu, ZHENG Wei-shun. Impact of traffic volume distribution on reliability of road network structure by using ant colony algorithm[J]. Journal of Chongqing Jiaotong University (Natural Science Edition), 2017, 36(5): 91-97, 120. (in Chinese) doi: 10.3969/j.issn.1674-0696.2017.05.16 [5] 段宗涛, 李莹, 郑西彬, 等. 基于Hadoop平台的实时多路径交通流分配算法[J]. 中国公路学报, 2014, 27(9): 98-104. doi: 10.3969/j.issn.1001-7372.2014.09.013DUAN Zong-tao, LI Ying, ZHENG Xi-bin, et al. Real-time multi-path traffic flow assignment algorithm based on Hadoop platform[J]. China Journal of Highway and Transport, 2014, 27(9): 98-104. (in Chinese) doi: 10.3969/j.issn.1001-7372.2014.09.013 [6] SORIGUERA F, MARTÍNEZ I, SALA M, et al. Effects of low speed limits on freeway traffic flow[J]. Transportation Research Part C: Emerging Technologies, 2017, 77: 257-274. doi: 10.1016/j.trc.2017.01.024 [7] VAN WAGENINGEN-KESSELS F, WILSON R E. Lane distribution estimation for heterogeneous traffic flows[J]. Transportation Research Procedia, 2015, 10: 13-20. doi: 10.1016/j.trpro.2015.09.051 [8] 秦严严, 王昊, 王炜, 等. 不同CACC渗透率条件下的混合交通流稳定性分析[J]. 交通运输系统工程与信息, 2017, 17(4): 63-69, 104. https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201704010.htmQIN Yan-yan, WANG Hao, WANG Wei, et al. Mixed traffic flow string stability analysis for different CACC penetration ranges[J]. Journal of Transportation Systems Engineering and Information Technology, 2017, 17(4): 63-69, 104. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201704010.htm [9] 赵朋, 王建伟, 孙茂棚, 等. 高速公路突发事件救援车辆诱导[J]. 中国公路学报, 2018, 31(9): 175-181. doi: 10.3969/j.issn.1001-7372.2018.09.020ZHAO Peng, WANG Jian-wei, SUN Mao-peng, et al. Vehicle scheduling for mountainous expressway traffic emergency[J]. China Journal of Highway and Transport, 2018, 31(9): 175-181. (in Chinese) doi: 10.3969/j.issn.1001-7372.2018.09.020 [10] 陈芳, 张卫华, 丁恒, 等. 基于出行者路径选择行为的VMS诱导策略研究[J]. 系统工程理论与实践, 2018, 38(5): 1263-1276. https://www.cnki.com.cn/Article/CJFDTOTAL-XTLL201805016.htmCHEN Fang, ZHANG Wei-hua, DING Heng, et al. Research on VMS inducing strategy based on the route selection behavior of travelers[J]. Systems Engineering—Theory and Practice, 2018, 38(5): 1263-1276. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XTLL201805016.htm [11] 干宏程, 杨珍珍. VMS行程时间诱导效益仿真算法[J]. 交通运输工程学报, 2012, 12(1): 121-126. http://transport.chd.edu.cn/article/id/201201019GAN Hong-cheng, YANG Zhen-zhen. Inductive benefit simulation algorithm of VMS travel time[J]. Journal of Traffic and Transportation Engineering, 2012, 12(1): 121-126. (in Chinese) http://transport.chd.edu.cn/article/id/201201019 [12] 梁伟, 张毅, 胡坚明. 基于局部连通性的在途动态路径诱导方法[J]. 交通运输系统工程与信息, 2018, 18(1): 59-65. https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201801010.htmLIANG Wei, ZHANG Yi, HU Jian-ming. Dynamic en-route guidance approach based on local-connectivity[J]. Journal of Transportation Systems Engineering and Information Technology, 2018, 18(1): 59-65. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201801010.htm [13] TIAN Da-xin, HU Jun-jie, SHENG Zheng-guo, et al. Swarm intelligence algorithm inspired by route choice behavior[J]. Journal of Bionic Engineering, 2016, 13(4): 669-678. doi: 10.1016/S1672-6529(16)60338-4 [14] XIE Xiao-feng, WANG Zun-jing. Cooperative group optimization with ants (CGO-AS): leverage optimization with mixed individual and social learning[J]. Applied Soft Computing, 2017, 50: 223-234. doi: 10.1016/j.asoc.2016.11.018 [15] 杨临涧, 赵祥模, 贺冰花, 等. 随机用户均衡交通分配问题的蚁群优化算法[J]. 交通运输工程学报, 2018, 18(3): 189-198. doi: 10.3969/j.issn.1671-1637.2018.03.020YANG Lin-jian, ZHAO Xiang-mo, HE Bing-hua, et al. An ant colony optimization algorithm of stochastic user equilibrium traffic assignment problem[J]. Journal of Traffic and Transportation Engineering, 2018, 18(3): 189-198. (in Chinese) doi: 10.3969/j.issn.1671-1637.2018.03.020 [16] 徐建闽, 王钰, 林培群. 大数据环境下的动态最短路径算法[J]. 华南理工大学学报(自然科学版), 2015, 43(10): 1-7. https://www.cnki.com.cn/Article/CJFDTOTAL-HNLG201510002.htmXU Jian-min, WANG Yu, LIN Pei-qun. A dynamic shortest path algorithm for big data[J]. Journal of South China University of Technology (Natural Science Edition), 2015, 43(10): 1-7. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HNLG201510002.htm [17] 马东超, 武涛, 王晓亮, 等. 个体开销受限的交通流优化分配方法[J]. 中国公路学报, 2016, 29(7): 134-142. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201607021.htmMA Dong-chao, WU Tao, WANG Xiao-liang, et al. Traffic optimized assignment method with limited individual cost[J]. China Journal of Highway and Transport, 2016, 29(7): 134-142. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201607021.htm [18] SENGE S, WEDDE H F. Bee-inpired road traffic control as an example of swarm intelligence in cyber-physical systems[C]//IEEE. 2012 38th Euromicro Conference on Software Engineering and Advanced Applications. New York: IEEE, 2012: 258-265. [19] KUMAR P M, DEVI G U, MANOGARAN G, et al. Ant colony optimization algorithm with Internet of vehicles for intelligent traffic control system[J]. Computer Networks, 2018, 144: 154-162. [20] POOLE A, KOTSIALOS A. Swarm intelligence algorithms for macroscopic traffic flow model validation with automatic assignment of fundamental diagrams[J]. Applied Soft Computing, 2016, 38: 134-150. [21] LISANGAN E A, SUMARTA S C. Route selection based on real time traffic condition using ant colony system and fuzzy inference system[C]//IEEE. 2017 3rd International Conference on Science in Information Technology (ICSITech). New York: IEEE, 2017: 66-71. [22] YANG A, NAEEM W, FEI Min-rui. Decentralised formation control and stability analysis for multi-vehicle cooperative manoeuvre[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(1): 92-100. [23] 田大新, 康璐. 基于鱼群效应的无人驾驶车辆编队算法研究[J]. 无人系统技术, 2018, 1(4): 62-67. https://www.cnki.com.cn/Article/CJFDTOTAL-UMST201804007.htmTIAN Da-xin, KANG Lu. Research on algorithm of unmanned vehicle formation based on fish school[J]. Unmanned Systems Technology, 2018, 1(4): 62-67. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-UMST201804007.htm [24] ERKE A, SAGBERG F, HAGMAN R. Effects of route guidance variable message signs (VMS) on driver behaviour[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2007, 10(6): 447-457. [25] LI Yan-song, LUO Qian, LIU Jia-jia, et al. TSP security in intelligent and connected vehicles: challenges and solutions[J]. IEEE Wireless Communications, 2019, 26(3): 125-131. [26] ZHU Z, LOO J, CHEN Y, et al. Recent advances in connected vehicles via information-centric networking[C]//IET. IET International Conference on Intelligent and Connected Vehicles (ICV 2016). London: IET, 2016: 1162. [27] 赵庆迁, 王亚萍, 雷建明, 等. 基于饱和度的路网交通态势实时辨识[J]. 交通科学与工程, 2019, 35(4): 104-110. https://www.cnki.com.cn/Article/CJFDTOTAL-CSJX201904017.htmZHAO Qing-qian, WANG Ya-ping, LEI Jian-ming, et al. Real-time identification of the road network traffic state based on saturation[J]. Journal of Transport Science and Engineering, 2019, 35(4): 104-110. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-CSJX201904017.htm [28] YADAV R N, YADAVA V, SINGH G K. Multi-objective optimization of process parameters in electro-discharge diamond face grinding based on ANN-NSGA-Ⅱ hybrid technique[J]. Frontiers of Mechanical Engineering, 2013, 8(3): 319-332. [29] 王春林, 冯一鸣, 叶剑, 等. 基于RBF神经网络与NSGA-Ⅱ算法的渣浆泵多目标参数优化[J]. 农业工程学报, 2017, 33(10): 109-115. https://www.cnki.com.cn/Article/CJFDTOTAL-NYGU201710014.htmWANG Chun-lin, FENG Yi-ming, YE Jian, et al. Multi-objective parameters optimization of centrifugal slurry pump based on RBF neural network and NSGA-Ⅱ genetic algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(10): 109-115. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-NYGU201710014.htm [30] ZHANG Yong, GONG Dun-wei, ZHANG Jian-hua. Robot path planning in uncertain environment using multi-objective particle swarm optimization[J]. Neurocomputing, 2013, 103: 172-185. [31] WANG Lin, YANG Bo, LI Yi, et al. A novel improvement of particle swarm optimization using dual factors strategy[C]//IEEE. 2014 IEEE Congress on Evolutionary Computation (CEC). New York: IEEE, 2014: 183-189. -





 点击查看大图
点击查看大图

计量
- 文章访问数: 1089
- HTML全文浏览量: 312
- PDF下载量: 185
- 被引次数: 0
