

Left-turn motion planning model of autonomous driving based on approximate grid risk assessment of vehicle-non-motor conflict
-
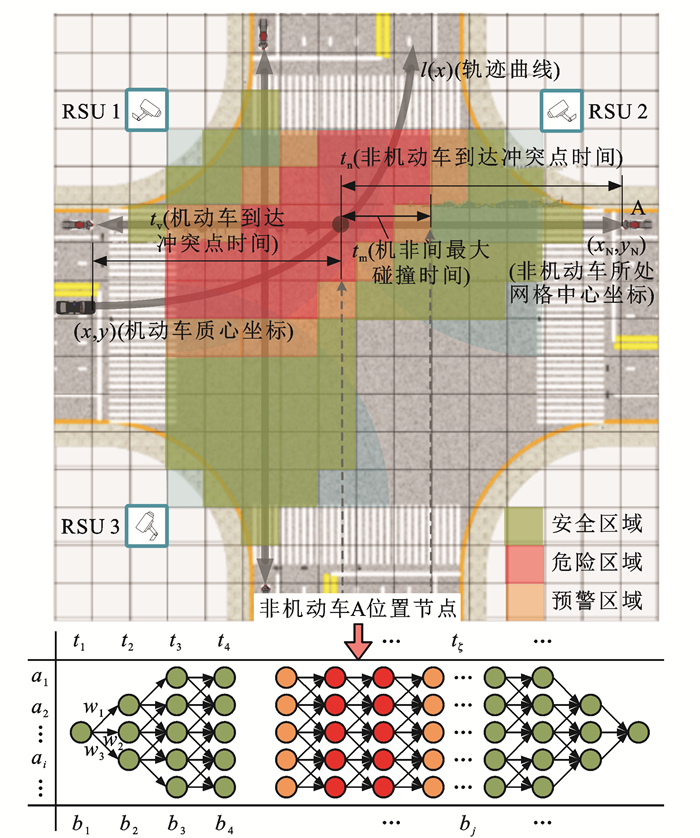
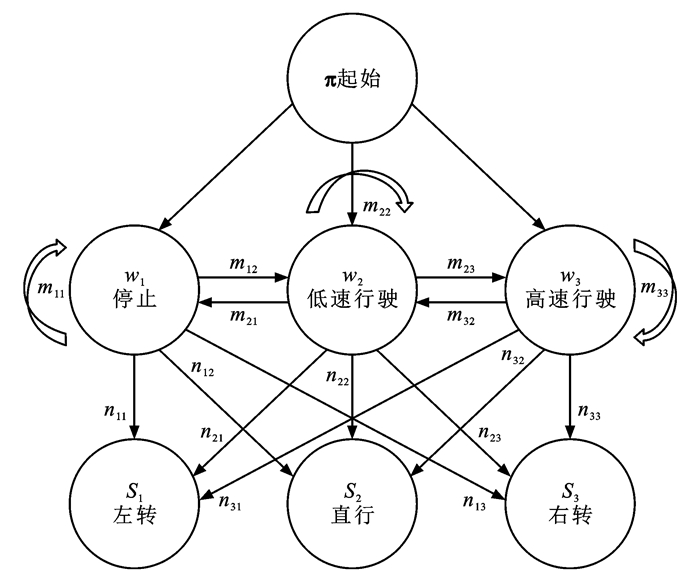
摘要: 为了提高自动驾驶车辆在复杂机非混行交叉口行车安全性、舒适性和效率,提出了一种基于机非冲突近似网格风险评估的自动驾驶左转运动规划模型,并进行模型泛化;设定静态离散序列交叉口网格区域的划分规则,根据多状态通行行为概率转换关系,预测非机动车在细分网格中的运动状态,并动态评估机非冲突区域的风险等级;在此基础上,采用模型预测方法设计自动驾驶车辆的横纵向控制算法,通过自适应调节航向与速度实现跟踪期望轨迹并同步规避网格冲突区域;结合车辆动力学与外部交互环境等约束条件,开发交叉口四相位信号控制交通仿真平台,采用模型在环测试的方式,从效率优度、舒适性优度、实际规划路径与参考路径的偏移量等方面,验证了对左转机非冲突区域运动规划的有效性。研究结果表明:所提出模型能够有效动态提取和预测网格风险信息,确保自动驾驶车辆与驶入交叉口非机动车的安全交互、高效通行与驾驶舒适性,其规划路径的偏移量与同类算法相比最大可降低17.1%,通行效率最大可提高26.6%,舒适性优度最大可提高39.3%,实际路径跟踪表现出高效通过交叉口机非冲突区域和规划路径占用空间低的明显优势。Abstract: In order to improve the driving safety, reliability and efficiency of autonomous vehicles at complex vehicle-non-motor mixed intersections, a left-turn motion planning model of autonomous driving based on approximate grid risk assessment of vehicle-non-motor conflict was proposed and generalized. The division rules of static discrete sequence intersection grid area were set.According to the probability conversion relationship of traffic behaviors in multi traffic states, the motion state of non-motor vehicle in the subdivision grid was predicted, and the risk level of the conflict area between motor vehicles and non-motor vehicles was dynamically evaluated. On this basis, the model prediction method was used to design the lateral and longitudinal control algorithms of autonomous vehicle, the desired trajectory could be tracked by adaptively adjusting the heading and speed, and the grid conflict area could be avoided synchronously. Combined with the constraints of vehicle dynamics and external interaction environment, a traffic simulation platform of intersection four-phase signal control was developed. From the aspects of efficiency optimization, comfort optimization, and the offset between actual planned path and reference path, the model-in-the-loop test was used to verify the effectiveness of the left-turn motion planning in the vehicle-non-motor conflict area. Research results show that the proposed model can effectively extract and predict grid risk information dynamically, and improves the safe interaction, efficient traffic and driving comfort between autonomous vehicles and surrounding non-motor vehicles. Compared with similar algorithms, the offset of the planned path can reduce by 17.1%, the traffic efficiency can increase by 26.6% and the comfort can increase by 39.3% at most. Therefore, the proposed model has obvious advantages in the efficient passage through vehicle-non-motor conflict area and low space occupation by the planned path. 2 tabs, 14 figs, 32 refs.
-

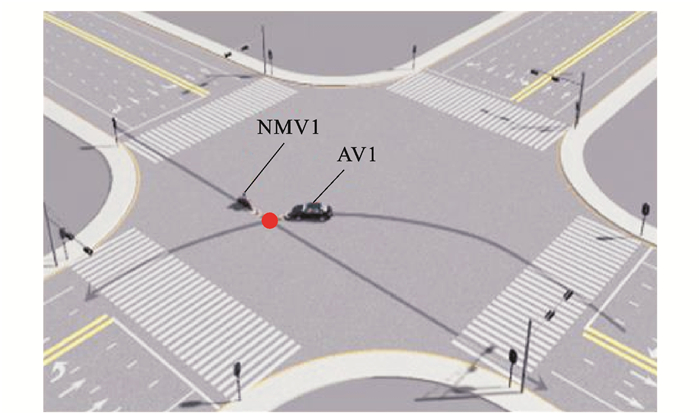
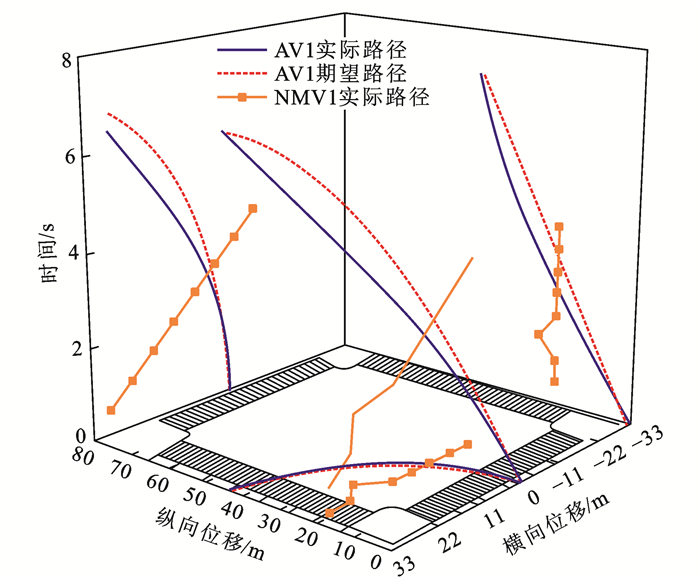
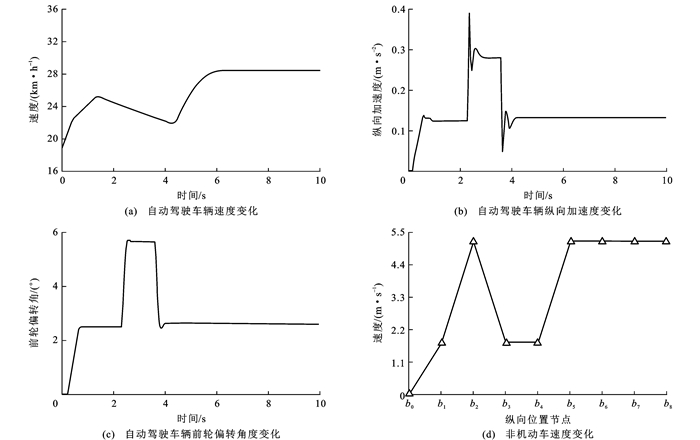
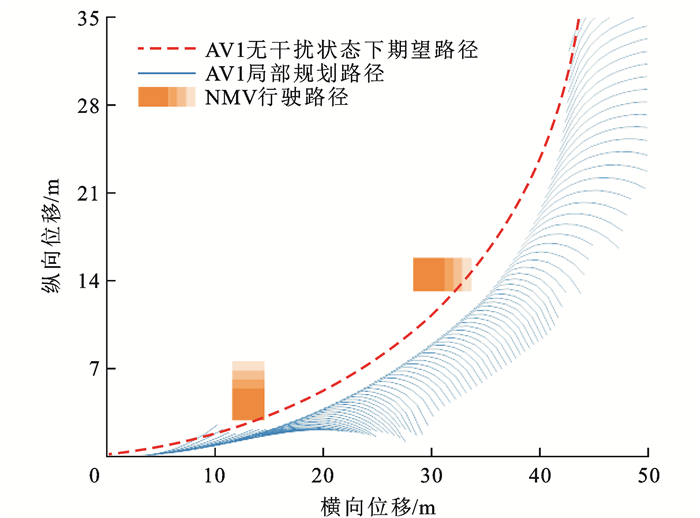
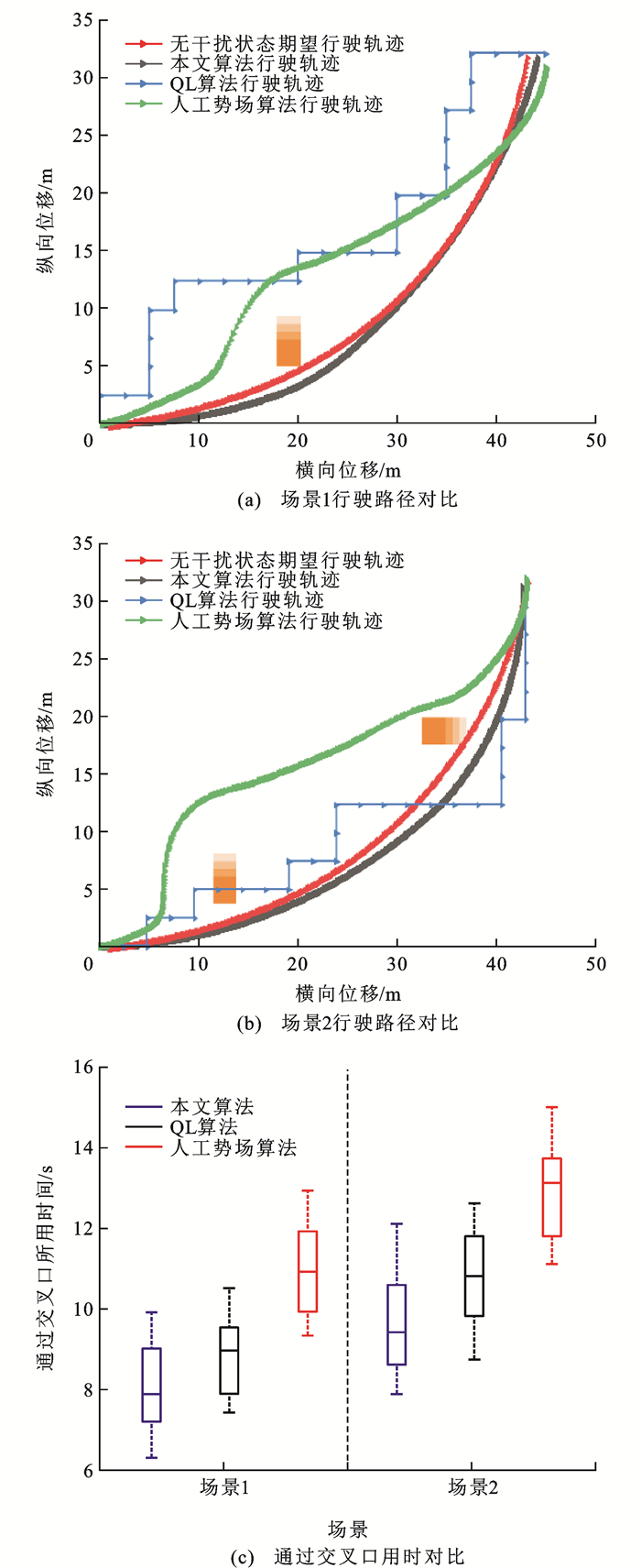
图 8 场景1自动驾驶车辆与非机动车实际行驶路径
Figure 8. Actual driving paths of autonomous and non-motor vehicles in Scene 1

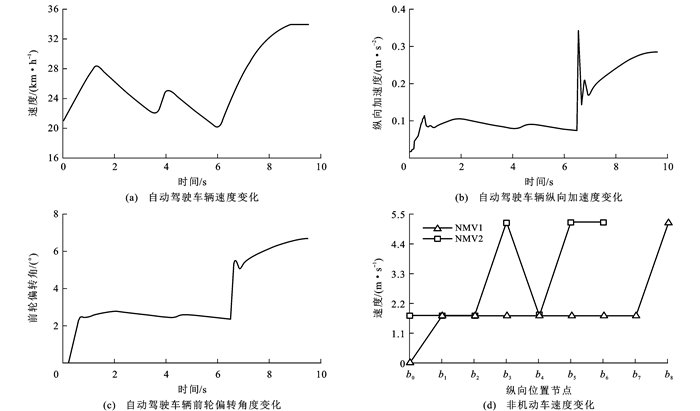
图 12 场景2自动驾驶车辆与非机动车实际行驶路径
Figure 12. Actual driving paths of autonomous and non-motor vehicles in Scene 2
表 1 非机动车不同状态下的速度划分
Table 1. Speed distribution in different non-motor vehicle states
状态 平均速度/ (m·s-1) 标准差 最小速度/ (m·s-1) 最大速度/ (m·s-1) 停止 0.00 0.10 0.0 0.1 低速行驶 1.74 0.55 0.4 3.4 高速行驶 5.20 0.57 3.7 6.9  下载: 导出CSV
下载: 导出CSV
表 2 三种非机动车离散状态下的方向变化概率
Table 2. Direction change probabilities in three discrete states of non-motor vehicles
方向变化 停止 低速行驶 高速行驶 左转 0.20 0.15 0.05 直行 0.60 0.70 0.90 右转 0.20 0.15 0.05
下载: 导出CSV
-
[1] 黄玲, 郭亨聪, 张荣辉, 等. 人机混驾环境下基于LSTM的无人驾驶车辆换道行为模型[J]. 中国公路学报, 2020, 33(7): 156-166. doi: 10.3969/j.issn.1001-7372.2020.07.016HUANG Ling, GUO Heng-cong, ZHANG Rong-hui, et al. LSTM-based lane-changing behavior model for unmanned vehicle under environment of heterogeneous human-driven and autonomous vehicles[J]. China Journal of Highway and Transport, 2020, 33(7): 156-166. (in Chinese) doi: 10.3969/j.issn.1001-7372.2020.07.016 [2] 巫诚诚, 陈大伟. 交叉口非机动车冲突易发点空间预测模型[J]. 中国安全科学学报, 2021, 31(8): 165-171. https://www.cnki.com.cn/Article/CJFDTOTAL-ZAQK202108026.htmWU Cheng-cheng, CHEN Da-wei. Spatial prediction model for risk points of non-motor vehicle conflict in intersections[J]. China Safety Science Journal, 2021, 31(8): 165-171. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZAQK202108026.htm [3] 张名芳, 李慢, 陈子凡, 等. 人机混驾环境下无信号交叉口自动驾驶汽车左转运动规划研究[J]. 中国公路学报, 2021, 34(7): 67-78. doi: 10.3969/j.issn.1001-7372.2021.07.006ZHANG Ming-fang, LI Man, CHEN Zi-fan, et al. Left-turn motion planning of autonomous vehicles at unsignalized intersections in an environment of heterogeneous traffic flow containing autonomous and human-driven vehicles[J]. China Journal of Highway and Transport, 2021, 34(7): 67-78. (in Chinese) doi: 10.3969/j.issn.1001-7372.2021.07.006 [4] 王畅, 付锐, 张琼, 等. 换道预警系统中参数TTC特性研究[J]. 中国公路学报, 2015, 28(8): 91-100, 108. doi: 10.3969/j.issn.1001-7372.2015.08.012WANG Chang, FU Rui, ZHANG Qiong, et al. Research on parameter TTC characteristics of lane change warning system[J]. China Journal of Highway and Transport, 2015, 28(8): 91-100, 108. (in Chinese) doi: 10.3969/j.issn.1001-7372.2015.08.012 [5] WANG Jian-ge, LUO Xiao-yuan, WONG Wai-Choong, et al. Specified-time vehicular platoon control with flexible safe distance constraint[J]. IEEE Transactions on Vehicular Technology, 2019, 68(11): 10489-10503. doi: 10.1109/TVT.2019.2939558 [6] GARGOUM S A, KARSTEN L. Virtual assessment of sight distance limitations using LiDAR technology: automated obstruction detection and classification[J]. Automation in Construction, 2021, 125(5): 103579. [7] LI Ying-shuai, LU Jian, XU Kui-sheng. Crash risk prediction model of lane-change behavior on approaching intersections[J]. Discrete Dynamics in Nature and Society, 2017, 2017: 7328562. [8] LIN Lei, LI Wei-zi, BI Hui-kun, et al. Vehicle trajectory prediction using LSTMs with spatial-temporal attention mechanisms[J]. IEEE Intelligent Transportation Systems Magazine, 2022, 14(2): 197-208. doi: 10.1109/MITS.2021.3049404 [9] KIM B, PARK K, YI K. Probabilistic threat assessment with environment description and rule-based multi-traffic prediction for integrated risk management system[J]. IEEE Intelligent Transportation Systems Magazine, 2017, 9(3): 8-22. doi: 10.1109/MITS.2017.2709807 [10] ZHOU Yu-sheng, LI Xue, YUEN K F. Holistic risk assessment of container shipping service based on Bayesian network modelling[J]. Reliability Engineering and System Safety, 2022, 220: 108305. doi: 10.1016/j.ress.2021.108305 [11] 杨炜, 黄立红, 赵祥模, 等. 基于FRRN注意力监督的沥青路面积水区域分割[J]. 交通运输工程学报, 2021, 21(5): 309-322. doi: 10.19818/j.cnki.1671-1637.2021.05.026YANG Wei, HUANG Li-hong, ZHAO Xiang-mo, et al. Puddle area segmentation of asphalt pavements based on FRRN attention and supervision[J]. Journal of Traffic and Transportation Engineering, 2021, 21(5): 309-322. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2021.05.026 [12] HIROSE T, TAKADA T, OIKAWA S, et al. Validation of driver support system based on real-world bicycle and motor vehicle flows[J]. Accident Analysis and Prevention, 2021, 156(9): 106131. [13] KHAN S I, RAKSUNTORN W. Accuracy of numerical rectification of video images to analyze bicycle traffic scenes[J]. Transportation Research Record, 2001, 1773(1): 32-38. doi: 10.3141/1773-04 [14] BRILON W, MILTNER T. Capacity at intersections without traffic signals[J]. Transportation Research Record, 2005, 1920(1): 32-40. doi: 10.1177/0361198105192000104 [15] WARD N J, FINLEY K, OTTO J, et al. Traffic safety culture and prosocial driver behavior for safer vehicle-bicyclist interactions[J]. Journal of Safety Research, 2020, 75: 24-31. doi: 10.1016/j.jsr.2020.07.003 [16] KAMRANI M, SRINIVASAN A R, CHAKRABORTY S, et al. Applying Markov decision process to understand driving decisions using basic safety messages data[J]. Transportation Research Part C: Emerging Technologies, 2020, 115: 102642. doi: 10.1016/j.trc.2020.102642 [17] DA SILVA JUNIOR A G, SANTOS D, NEGREIROS A, et al. High-level path planning for an autonomous sailboat robot using Q-learning[J]. Sensors, 2020, 20(6): 1550. doi: 10.3390/s20061550 [18] YANG Jin-wen, WANG Ping, YUAN Wu-bei, et al. Automatic generation of optimal road trajectory for the rescue vehicle in case of emergency on mountain freeway using reinforcement learning approach[J]. IET Intelligent Transport Systems, 2021, 15(9): 1142-1152. doi: 10.1049/itr2.12081 [19] 赵祥模, 连心雨, 刘占文, 等. 基于MM-STConv的端到端自动驾驶行为决策模型[J]. 中国公路学报, 2020, 33(3): 170-183. doi: 10.3969/j.issn.1001-7372.2020.03.016ZHAO Xiang-mo, LIAN Xin-yu, LIU Zhan-wen, et al. End-to-end autonomous driving-behavior decision model based on MM-STConv[J]. China Journal of Highway and Transport, 2020, 33(3): 170-183. (in Chinese) doi: 10.3969/j.issn.1001-7372.2020.03.016 [20] SUN Jia-yi, TANG Jun, LAO Song-yang. Collision avoidance for cooperative UAVs with optimized artificial potential field algorithm[J]. IEEE Access, 2017, 5: 18382-18390. doi: 10.1109/ACCESS.2017.2746752 [21] HUANG Yan-jun, DING Hai-tao, ZHANG Yu-biao, et al. A motion planning and tracking framework for autonomous vehicles based on artificial potential field elaborated resistance network(APFE-RN)approach[J]. IEEE Transactions on Industrial Electronics, 2020, 67(2): 1376-1386. doi: 10.1109/TIE.2019.2898599 [22] 单云霄, 郭晓旻, 龙江云, 等. 渐优随机采样算法在结构化道路无人驾驶中的应用[J]. 中国公路学报, 2018, 31(4): 192-201. doi: 10.3969/j.issn.1001-7372.2018.04.023SHAN Yun-xiao, GUO Xiao-min, LONG Jiang-yun, et al. Asymptotically sampling-based algorithm with applications to autonomous urban driving on structured road[J]. China Journal of Highway and Transport, 2018, 31(4): 192-201. (in Chinese) doi: 10.3969/j.issn.1001-7372.2018.04.023 [23] LIM W, LEE S, SUNWOO M, et al. Hierarchical trajectory planning of an autonomous car based on the integration of a sampling and an optimization method[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(2): 613-626. doi: 10.1109/TITS.2017.2756099 [24] LETIZIA N A, SALAMAT B, TONELLO A M. A novel recursive smooth trajectory generation method for unmanned vehicles[J]. IEEE Transactions on Robotics, 2021, 37(5): 1792-1805. doi: 10.1109/TRO.2021.3053649 [25] VAN HOEK R, PLOEG J, NIJMEIJER H. Cooperative driving of automated vehicles using B-splines for trajectory planning[J]. IEEE Transactions on Intelligent Vehicles, 2021, 6(3): 594-604. doi: 10.1109/TIV.2021.3072679 [26] 席裕庚, 李德伟, 林姝. 模型预测控制: 现状与挑战[J]. 自动化学报, 2013, 39(3): 222-236. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201303005.htmXI Yu-geng, LI De-wei, LIN Shu. Model predictive control—status and challenges[J]. Acta Automatica Sinica, 2013, 39(3): 222-236. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201303005.htm [27] FIENGO G, LUI D G, PETRILLO A, et al. Distributed robust PID control for leader tracking in uncertain connected ground vehicles with V2V communication delay[J]. IEEE/ASME Transactions on Mechatronics, 2019, 24(3): 1153-1165. doi: 10.1109/TMECH.2019.2907053 [28] LIN Shu, LI De-wei, SCHUTTER B. Optimizing the performance of the feedback controller for state-based switching bilinear systems[J]. Optimal Control Applications and Methods, 2020, 41(6): 1844-1853. doi: 10.1002/oca.2639 [29] 张骁骏, 袁夏明, 王向阳, 等. 一种固定时间收敛模型参考终端滑模控制方法[J]. 自动化学报, 2022, 48(3): 712-723. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO202203005.htmZHANG Xiao-jun, YUAN Xia-ming, WANG Xiang-yang, et al. A model reference terminal sliding mode control method with fixed-time convergence[J]. Acta Automatica Sinica, 2022, 48(3): 712-723. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO202203005.htm [30] ZHOU Zhao, LIN Shu, DU Wen-li, et al. Integration of regional demand management and signals control for urban traffic networks[J]. IEEE Access, 2019, 7: 20235-20248. doi: 10.1109/ACCESS.2019.2897157 [31] WAKIM C F, CAPPERON S, OKSMAN J. A Markovian model of pedestrian behavior[C]//IEEE. 2004 IEEE International Conference on Systems, Man and Cybernetics. New York: IEEE, 2004: 4028-4033. [32] MING Ting-you, DENG Wei-wen, ZHANG Su-min, et al. MPC-Based trajectory tracking control for intelligent vehicles[C]//SAE. SAE 2016 World Congress and Exhibition. Warrendale: SAE, 2016, DOI: 10.4271/2016-01-0452. -






 点击查看大图
点击查看大图

计量
- 文章访问数: 1504
- HTML全文浏览量: 368
- PDF下载量: 149
- 被引次数: 0
