

Vehicle trajectory prediction based on spatio-temporal information fusion in crowded driving scenario
-
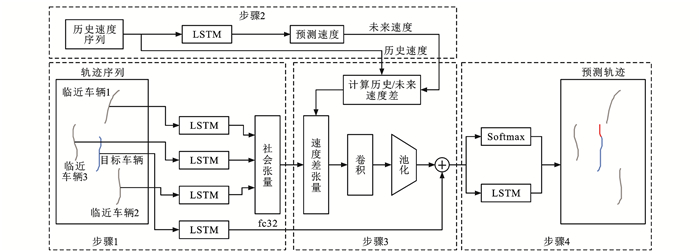
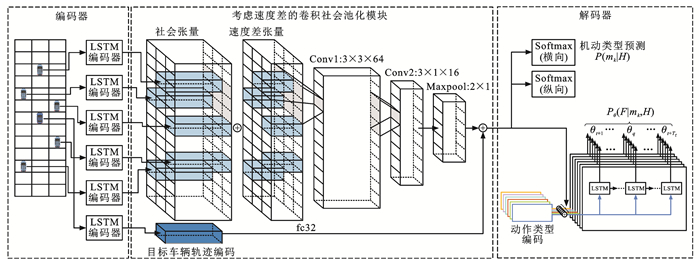
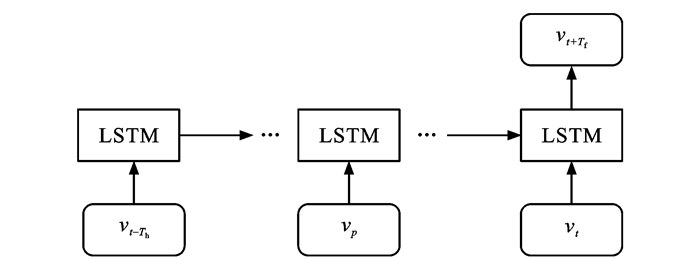
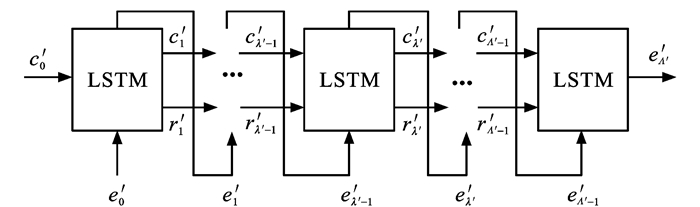
摘要: 将车辆间时空交互信息融入卷积社会池化网络中,提出了一种面向群体行驶场景的有人驾驶车辆轨迹预测模型;使用长短时记忆(LSTM)网络预测群体车辆速度,基于此预测值计算群体车辆间的速度差;构造LSTM编码器捕捉群体车辆行驶轨迹的时间序列特征,设计卷积社会池化网络提取群体车辆间的空间依赖关系,使用LSTM解码器预测未来车辆各种动作的出现概率和相应轨迹,将具有最高出现概率的动作及其轨迹作为最终轨迹预测结果;使用真实轨迹数据集对所构建模型进行了参数标定和性能验证,测试了不同轨迹编解码与速度预测方法对模型性能的影响,确定了最优模型结构。计算结果表明:相较于历史速度,使用预测速度计算速度差作为模型输入可将均方根误差(RMSE)降低19.45%;相较于门控循环神经网络,使用LSTM进行速度预测可将RMSE降低4.91%;相较于原始卷积社会池化网络,所提出模型的轨迹预测误差在RMSE与负似然对数2个指标上分别降低了20.32%和21.04%,明显优于其他卷积社会池化网络变体;所提出模型与原始卷积社会池化网络计算耗时差距约3 ms,能够满足实时应用要求。Abstract: The spatio-temporal interaction information among vehicles was integrated into the convolutional social pooling network to formulate a human-driving vehicle trajectory prediction model in the crowded driving scenario. The long short term memory (LSTM) network was used to predict the speeds of the crowded vehicles. The prediction result was used to calculate the speed differences among the vehicles. The LSTM encoder was built to capture the time-series features of the crowded vehicle trajectories. The convolutional social pooling network was designed to captured the spatial dependence of the crowded vehicles. The emerging probabilities of all possible movements of the vehicles and corresponding trajectories were predicted by the LSTM decoder. The movement with the highest emerging probability and its trajectory were taken as final prediction result of trajectory. The real vehicle trajectory dataset was used in the parameter calibration and performance verification of the proposed model. Different methods of trajectory encoding/decoding and speed predicting were tested to figure out their influences on the model performance. The test results were used to identify the optimal model structure. Calculation results show that compared with historical speed, predicted speed used to calculate speed difference as model input can decrease by 19.45% in terms of root mean square error (RMSE). Compared with the gate recurrent unit, the LSTM network as speed predictor can decrease by 4.91% in terms of RMSE. Compared with the original convolutional social pooling network, the trajectory prediction errors of the proposed model respectively decrease by 20.32% and 21.04% in terms of RMSE and negative log-likelihood. The model performance is also significantly better than other variants of the original convolutional social pooling network. The computation time difference of the proposed model and original convolutional social pooling network is about 3 ms, which meets the request of real-time application. 8 tabs, 9 figs, 23 refs.
-

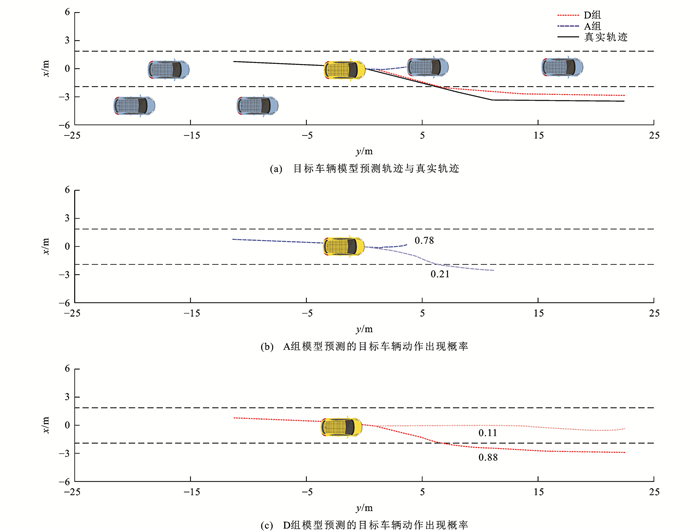
图 8 换道场景中原始与改进卷积社会池化网络预测结果对比
Figure 8. Comparison of prediction results of original and improved convolutional social pooling networks in lane changing scenario

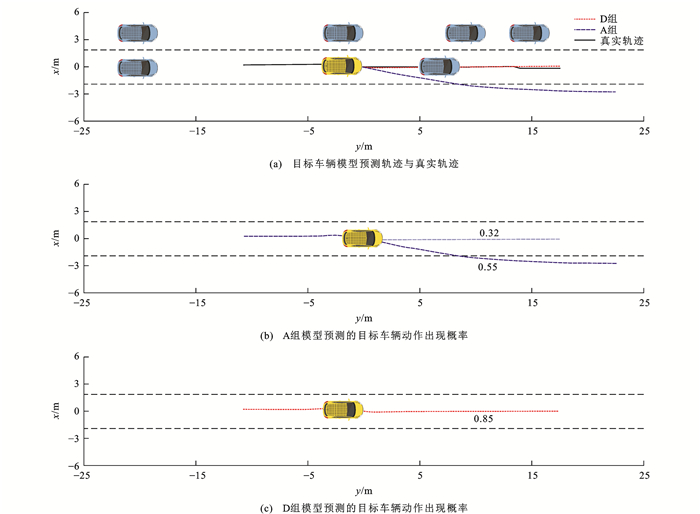
图 9 跟驰场景中原始与改进卷积社会池化网络预测结果对比
Figure 9. Comparison of prediction results of original and improved convolutional social pooling networks in car-following scenario
表 1 轨迹预测子网络部分参数
Table 1. Partial parameters of trajectory prediction subnetwork
网络模块 网络类型 网络设置 输出数据维度 编码器 输入层 16×2 词嵌入层(Embedding) 16×32 LSTM编码层(Encoding) 64 1×64 卷积社会池化网络 社会张量(Social Tensor) 13×3 13×3×64 卷积层1(Conv1) 3×3×64 11×1×64 卷积层2(Conv2) 3×1×16 9×1×16 最大池化层(Maxpool) 2×1 5×1×16 扁平层(Flatten) 1×80 解码器 LSTM解码层(Decoding) 128 6×25×5  下载: 导出CSV
下载: 导出CSV
表 2 A~C组模型RMSE对比
Table 2. Comparison of RMSEs in model groups A-C
组别 未来不同时刻的RMSE/m 未来5 s时降低百分比/% 未来1 s时 未来2 s时 未来3 s时 未来4 s时 未来5 s时 A 0.576 8 1.264 1 2.113 8 3.190 5 4.538 9 B 0.571 1 1.262 6 2.106 6 3.168 0 4.489 8 1.08 C 0.551 0 1.109 9 1.654 3 2.366 2 3.252 7 28.34
下载: 导出CSV
表 3 A~C组模型NLL对比
Table 3. Comparison of NLLs in model groups A-C
组别 未来不同时刻的NLL 未来5 s时降低百分比/% 未来1 s时 未来2 s时 未来3 s时 未来4 s时 未来5 s时 A 1.575 0 3.071 3 3.928 8 4.560 1 5.085 8 B 0.689 6 2.212 2 3.083 8 3.714 1 4.228 6 16.85 C 0.728 5 2.119 6 2.843 5 3.429 6 3.923 5 22.85
下载: 导出CSV
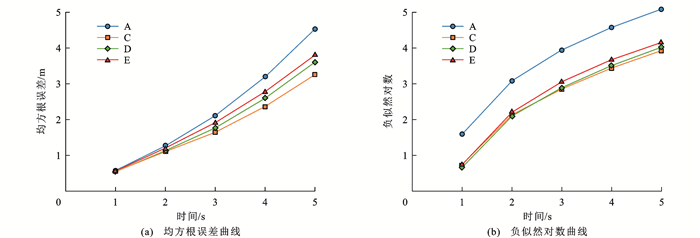
表 4 A、C~E组模型RMSE对比
Table 4. Comparison of RMSEs in model groups A and C-E
组别 未来不同时刻的RMSE/m 未来5 s时降低百分比/% 未来1 s时 未来2 s时 未来3 s时 未来4 s时 未来5 s时 A 0.576 8 1.264 1 2.113 8 3.190 5 4.538 9 C 0.551 0 1.109 9 1.654 3 2.366 2 3.252 7 28.34 D 0.541 3 1.121 2 1.768 5 2.597 3 3.616 4 20.32 E 0.555 0 1.193 7 1.914 6 2.771 9 3.803 3 16.21
下载: 导出CSV
表 5 A、C~E组模型NLL对比
Table 5. Comparison of NLLs of groups A and C-E
组别 未来不同时刻的NLL 未来5 s时降低百分比/% 未来1 s时 未来2 s时 未来3 s时 未来4 s时 未来5 s时 A 1.575 0 3.071 3 3.928 8 4.560 1 5.085 8 C 0.728 5 2.119 6 2.843 5 3.429 6 3.923 5 22.85 D 0.642 2 2.079 5 2.880 8 3.499 2 4.015 8 21.04 E 0.684 1 2.189 7 3.046 1 3.655 7 4.147 1 18.46
下载: 导出CSV
表 6 A、F组模型RMSE对比
Table 6. Comparison of RMSEs in model groups A and F
组别 未来不同时刻的RMSE/m 未来5 s时降低百分比/% 未来1 s时 未来2 s时 未来3 s时 未来4 s时 未来5 s时 A 0.576 8 1.264 1 2.113 8 3.190 5 4.538 9 F 0.577 6 1.256 6 2.100 2 3.172 9 4.495 5 0.96
下载: 导出CSV
表 7 A、F组模型NLL对比
Table 7. Comparison of NLLs in model groups A and F
组别 未来不同时刻的NLL 未来5 s时降低百分比/% 未来1 s时 未来2 s时 未来3 s时 未来4 s时 未来5 s时 A 1.575 0 3.071 3 3.928 8 4.560 1 5.085 8 F 1.638 9 3.118 7 3.965 0 4.589 9 5.100 7 -0.29
下载: 导出CSV
表 8 模型耗时对比
Table 8. Time-consuming comparison of models
组别 A B C D E F 时间/ms 10.71 12.21 12.81 13.81 14.69 20.07
下载: 导出CSV
-
[1] 李立, 徐志刚, 赵祥模, 等. 智能网联汽车运动规划方法研究综述[J]. 中国公路学报, 2019, 32(6): 20-33. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906003.htmLI Li, XU Zhi-gang, ZHAO Xiang-mo, et al. Review of motion planning methods of intelligent connected vehicles[J]. China Journal of Highway and Transport, 2019, 32(6): 20-33. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906003.htm [2] 采国顺, 刘昊吉, 冯吉伟, 等. 智能汽车的运动规划与控制研究综述[J]. 汽车安全与节能学报, 2021, 12(3): 279-297. doi: 10.3969/j.issn.1674-8484.2021.03.002CAI Guo-shun, LIU Hao-ji, FENG Ji-wei, et al. Review on the research of motion planning and control for intelligent vehicles[J]. Journal of Automotive Safety and Energy, 2021, 12(3): 279-297. (in Chinese) doi: 10.3969/j.issn.1674-8484.2021.03.002 [3] 李柏, 张友民, 邵之江. 自动驾驶车辆运动规划方法综述[J]. 控制与信息技术, 2018(6): 1-6. https://www.cnki.com.cn/Article/CJFDTOTAL-BLJS201806002.htmLI Bai, ZHANG You-min, SHAO Zhi-jiang. Motion planning methodologies for automated vehicles: a critical review[J]. Control and Information Technology, 2018(6): 1-6. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-BLJS201806002.htm [4] 杨澜, 赵祥模, 吴国垣, 等. 智能网联汽车协同生态驾驶策略综述[J]. 交通运输工程学报, 2020, 20(5): 58-72. doi: 10.19818/j.cnki.1671-1637.2020.05.004YANG Lan, ZHAO Xiang-mo, WU Guo-yuan, et al. Review on connected and automated vehicles based cooperative eco-driving strategies[J]. Journal of Traffic and Transportation Engineering, 2020, 20(5): 58-72. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2020.05.004 [5] 王殿海, 金盛. 车辆跟驰行为建模的回顾与展望[J]. 中国公路学报, 2012, 25(1): 115-127. doi: 10.3969/j.issn.1001-7372.2012.01.018WANG Dian-hai, JIN Sheng. Review and outlook of modeling of car following behavior[J]. China Journal of Highway and Transport, 2012, 25(1): 115-127. (in Chinese) doi: 10.3969/j.issn.1001-7372.2012.01.018 [6] ZHENG Zu-duo. Recent developments and research needs in modeling lane changing[J]. Transportation Research Part B: Methodological, 2014, 60: 16-32. doi: 10.1016/j.trb.2013.11.009 [7] SCHREIER M, WILLERT V, ADAMY J. An integrated approach to maneuver-based trajectory prediction and criticality assessment in arbitrary road environments[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(10): 2751-2766. doi: 10.1109/TITS.2016.2522507 [8] SIMMONS R, BROWNING B, ZHANG Yi-lu, et al. Learning to predict driver route and destination intent[C]//IEEE. 2006 IEEE Intelligent Transportation Systems Conference. New York: IEEE, 2006: 127-132. [9] RATHORE P, KUMAR D, RAJASEGARAR S, et al. A scalable framework for trajectory prediction[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(10): 3860-3874. doi: 10.1109/TITS.2019.2899179 [10] ALTCHÉ F, DE LA FORTELLE A. An LSTM network for highway trajectory prediction[C]//IEEE. 2017 IEEE 20th International Conference on Intelligent Transportation Systems. New York: IEEE, 2017: 353-359. [11] ZHANG Xiao-hui, SUN Jie, QI Xiao, et al. Simultaneous modeling of car-following and lane-changing behaviors using deep learning[J]. Transportation Research Part C: Emerging Technologies, 2019, 104: 287-304. doi: 10.1016/j.trc.2019.05.021 [12] XING Yang, LYU Chen, MO Xiao-yu, et al. Toward safe and smart mobility: energy-aware deep learning for driving behavior analysis and prediction of connected vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(7): 4267-4280. doi: 10.1109/TITS.2021.3052786 [13] CHEN Meng, ZUO Yi-xuan, JIA Xiao-yi, et al. CEM: a convolutional embedding model for predicting next locations[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(7): 3349-3358. [14] ALAHI A, GOEL K, RAMANATHAN V, et al. Social LSTM: human trajectory prediction in crowded spaces[C]//IEEE. 2016 IEEE Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2016: 961-971. [15] HOCHREITER S, SCHMIDHUBER J. Long short-term memory[J]. Neural Computation, 1997, 9(8): 1735-1780. [16] 赵祥模, 连心雨, 刘占文, 等. 基于MM-STConv的端到端自动驾驶行为决策模型[J]. 中国公路学报, 2020, 33(3): 170-183. doi: 10.3969/j.issn.1001-7372.2020.03.016ZHAO Xiang-mo, LIAN Xin-yu, LIU Zhan-wen, et al. End-to-end autonomous driving-behavior decision model based on MM-STConv[J]. China Journal of Highway and Transport, 2020, 33(3): 170-183. (in Chinese) doi: 10.3969/j.issn.1001-7372.2020.03.016 [17] DEO N, TRIVEDI M M. Convolutional social pooling for vehicle trajectory prediction[C]//IEEE. 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. New York: IEEE, 2018: 1549-1557. [18] MAHMUDS M, FERREIRA L, HOQUE M S, et al. Application of proximal surrogate indicators for safety evaluation: a review of recent developments and research needs[J]. IATSS Research, 2017, 41(4): 153-163. [19] PINNOWJ, MASOUD M, ELHENAWY M, et al. A review of naturalistic driving study surrogates and surrogate indicator viability within the context of different road geometries[J]. Accident Analysis and Prevention, 2021, 157: 106185. [20] CHO K, VAN MERRIENBOER B, GULCEHRE C, et al. Learning phrase representations using RNN encoder-decoder for statistical machine translation[C]//IEEE. Proceedings of the 2014 Conference on Empirical Methods in Natural Language Processing. New York: IEEE, 2014: 1724-1734. [21] CHUNG J, GULCEHRE C, CHO K H, et al. Empirical evaluation of gated recurrent neural networks on sequence modeling[C]//MIT Press. 28th Conference on Neural Information Processing Systems. Cambridge: MIT Press, 2014: 1-9. [22] 刘创, 梁军. 基于注意力机制的车辆运动轨迹预测[J]. 浙江大学学报(工学版), 2020, 54(6): 1156-1163. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDZC202006012.htmLIU Chuang, LIANG Jun. Vehicle motion trajectory prediction based on attention mechanism[J]. Journal of Zhejiang University (Engineering Science), 2020, 54(6): 1156-1163. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZDZC202006012.htm [23] HASAN M, SOLERNOU A, PASCHALIDIS E, et al. Maneuver-aware pooling for vehicle trajectory prediction[J]. arXiv, 2021: 20210095519. -


 点击查看大图
点击查看大图

计量
- 文章访问数: 1293
- HTML全文浏览量: 454
- PDF下载量: 207
- 被引次数: 0
