

SVM-LSTM-based car-following behavior recognition and information credibility discirmination
-
摘要: 为利用智能车路协同系统内实时交互信息有效提升交通系统的安全性,提出了基于交通业务特征的交通信息可信甄别方法;重点构建了基于支持向量机(SVM)-长短时记忆(LSTM)神经网络的车辆跟驰行为识别与信息可信甄别模型,包括基于SVM的车辆跟驰行为识别模型和基于LSTM神经网络的车辆跟驰速度预测模型;设定了表征车辆行驶状态的特征向量,基于SVM的车辆跟驰行为识别模型将车辆行驶状态分为跟驰与非跟驰;对于跟驰车辆,基于LSTM神经网络的车辆跟驰速度预测模型根据其历史数据进行速度预测;SVM-LSTM信息可信甄别模型通过检验跟驰车辆的预测速度与其实际速度的差是否在合理范围来判断车辆数据的可信性,实现信息的可信甄别;采用公开数据集对提出的模型进行了训练与测试,并构建了不同异常类型和异常幅度的多个异常测试数据集,对基于SVM-LSTM神经网络的车辆跟驰行为识别与信息可信甄别模型进行了验证。研究结果表明:基于SVM的车辆跟驰行为识别模型对车辆行驶行为识别的准确率达到了99%,基于LSTM神经网络的车辆跟驰速度预测模型的跟驰速度预测精度达到了cm·s-1数量级;基于SVM-LSTM神经网络的车辆跟驰行为识别与信息可信甄别模型在正常数据测试集与多个异常数据测试集上的甄别正确率达到了97%。由此可见,提出的方法可用于路侧设备(RSUs)对车载单元(OBUs)实时信息和车载单元间实时信息的可信甄别。Abstract: To effectively improve the traffic system security by using the real-time interaction information in intelligent vehicle-infrastructure cooperative systems (i-VICS), a credibility discrimination approach for traffic information based on the traffic business features was proposed. In particular, the model for the car-following behavior recognition and the information credibility discrimination was built based on the support vector machine (SVM) and long short-term memory (LSTM) neural network. It was composed of the SVM-based car-following behavior recognition model and the LSTM neural network-based car-following speed prediction model. The feature vector representing the vehicle driving states was set, and the vehicle driving states were divided into the following and non-following by the SVM-based car-following behavior recognition model. For following vehicles, their speeds were predicted by the LSTM neural network-based car-following speed prediction model according to the history data. With the SVM-LSTM-based information credibility discrimination model, the credibility of vehicle data was judged by checking whether the difference between the predicted speed and the actual speed of the following vehicles was within the reasonable range, and in this way, the information credibility discrimination was achieved. The public dataset was employed to train and test the proposed models, and several abnormal test datasets of various abnormity types and abnormity amplitude were built to verify the SVM-LSTM neural network-based model for the car-following behavior recognition and the information credibility discrimination. Research results show that the vehicle driving behavior recognition accuracy of the SVM-based car-following behavior recognition model is up to 99%, and the predicted car-following speed precision with an order of magnitude of cm·s-1 can be achieved by the LSTM neural network-based car-following speed prediction model. The discrimination accuracy of the SVM-LSTM neural network-based model for the car-following behavior recognition and information credibility discrimination is up to 97% on the normal test datasets and multiple abnormal test datasets. Thus, the proposed approach can be applied for the real-time information credibility discriminations of road side units (RSUs) to on-board units (OBUs) and between OBUs. 8 tabs, 9 figs, 30 refs.
-

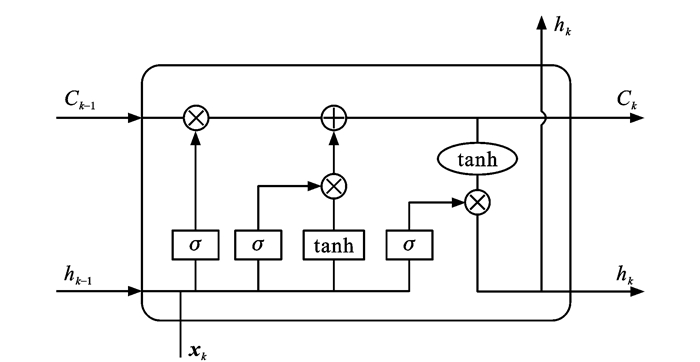
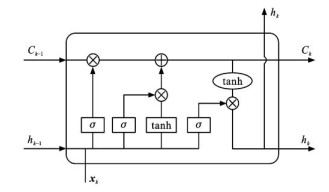
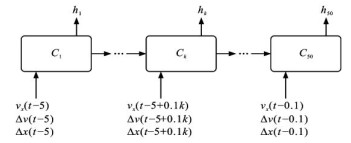
图 3 跟驰场景下车辆速度预测的LSTM神经网络结构
Figure 3. LSTM neural network structure for speed prediction of vehicle under car-following scenario

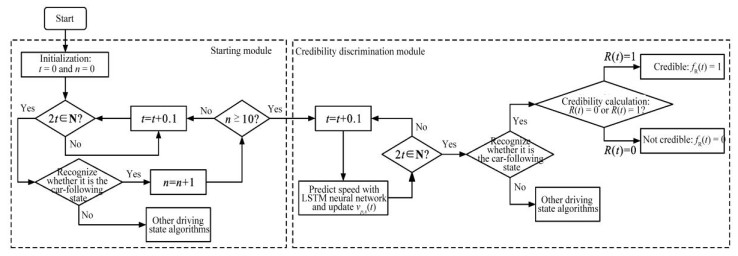
图 4 可信甄别计算流程架构
Figure 4. Framework of calculation process for credibility discrimination

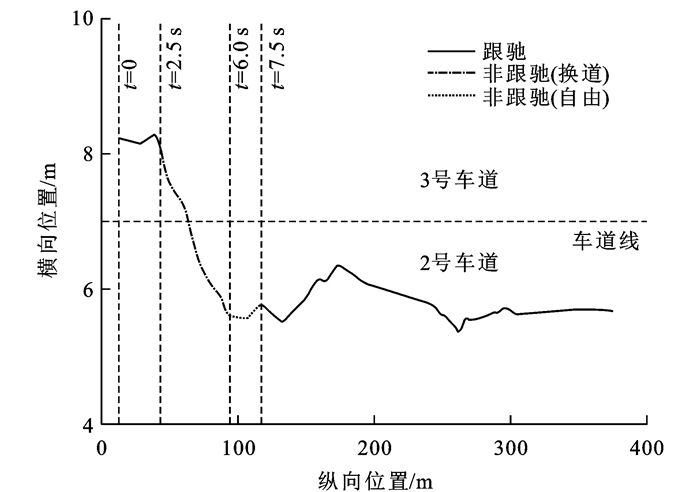
图 5 37号车辆行驶轨迹与行驶状态分类
Figure 5. Classifications of vehicle trajectory and driving states for vehicle No.37

3. LSTM neural network structure for speed prediction of vehicle under car-following scenario
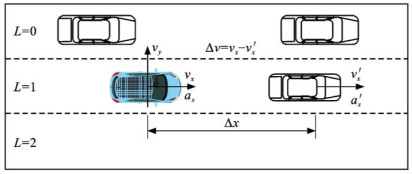
表 1 SVM输入数据参数
Table 1. Parameters of input data for SVM
参数名称 符号 t时刻纵向速度/(m·s-1) vx(t) t时刻横向速度/(m·s-1) vy(t) t时刻纵向加速度/(m·s-2) ax(t) t时刻车道编号变化 ΔL(t) t时刻与前车速度差/(m·s-1) Δv(t) t时刻与前车车头间距/m Δx(t) t时刻前车纵向加速度/(m·s-2) a'x(t)  下载: 导出CSV
下载: 导出CSV
表 2 SVM二分类器在训练集上的混淆矩阵
Table 2. Confusion matrix of SVM binary classifier on training set
训练集 预测表现 总计 1 0 实际表现 1 24 853 114 24 967 0 188 23 512 23 700 总计 25 041 23 626 48 667
下载: 导出CSV
表 3 SVM二分类器在测试集上的混淆矩阵
Table 3. Confusion matrix of SVM binary classifier on testing set
测试集 预测表现 总计 1 0 实际表现 1 10 616 84 10 700 0 104 10 054 10 158 总计 10 720 10 138 20 858
下载: 导出CSV
表 4 LSTM神经网络结构参数与训练参数
Table 4. Parameters of LSTM neural network structure and training
参数 数值 参数 数值 神经网络层数 2 批大小 32 输入维度 3 损失函数 均方误差 隐藏层维度 1 学习率 0.002 序列长度 50 优化器 Adam 训练轮次 60
下载: 导出CSV
表 5 模型评估指标
Table 5. Indices for model evaluation
评估指标 La/(m·s-1) Ls/(m2·s-2) 训练集 5.86×10-2 3.25×10-3 验证集 5.91×10-2 2.96×10-3 测试集 5.89×10-2 3.98×10-3
下载: 导出CSV
表 6 测试数据集划分
Table 6. Classification of testing dataset
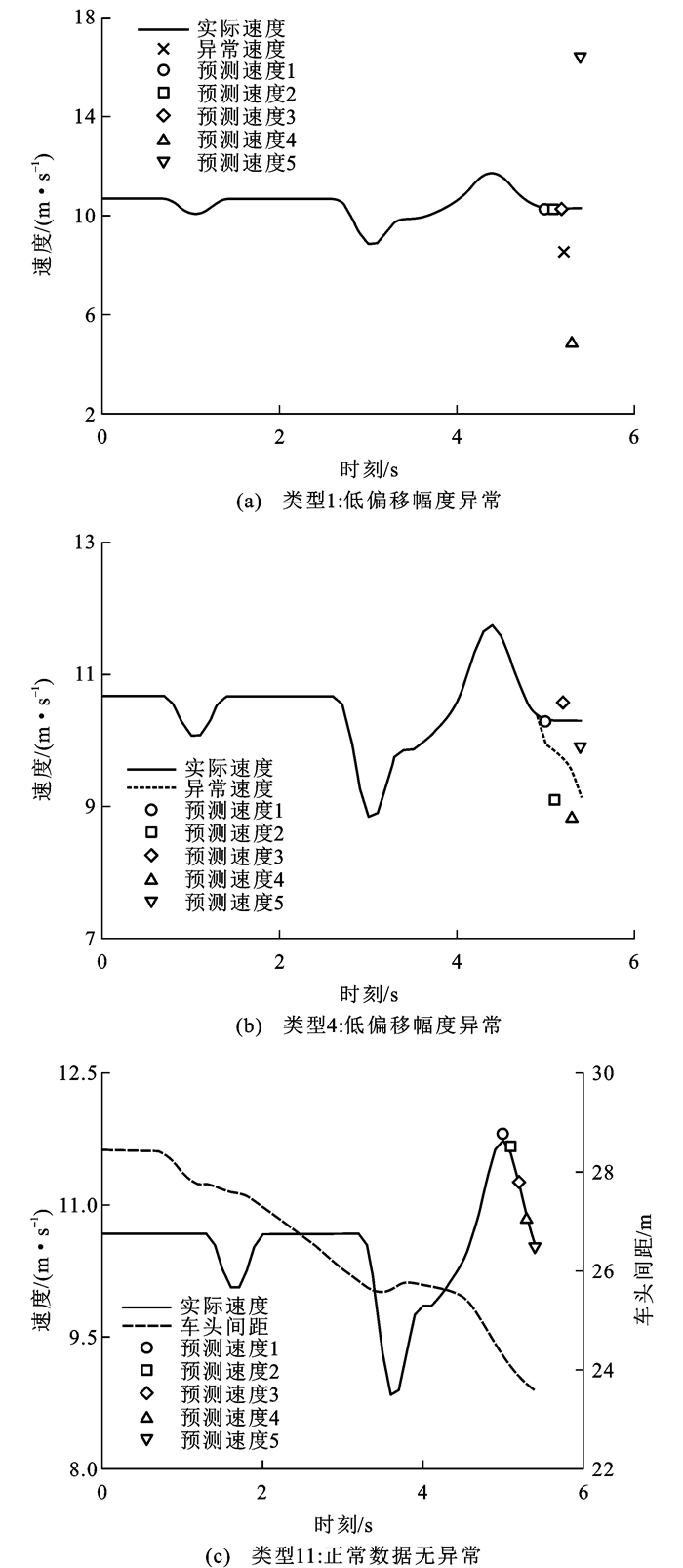
异常类型 低偏移幅度 高偏移幅度 类型1 数据集1 数据集2 类型2 数据集3 数据集4 类型3 数据集5 数据集6 类型4 数据集7 数据集8 类型5 数据集9 数据集10 正常数据 数据集11
下载: 导出CSV
表 7 启动模块对车辆行驶状态识别结果的混淆矩阵
Table 7. Confusion matrix of vehicle driving state recognition results in starting module
识别结果 SVM识别 总计 跟驰 非跟驰 实际表现 跟驰 470 2 472 非跟驰 2 226 228 总计 472 228 700
下载: 导出CSV
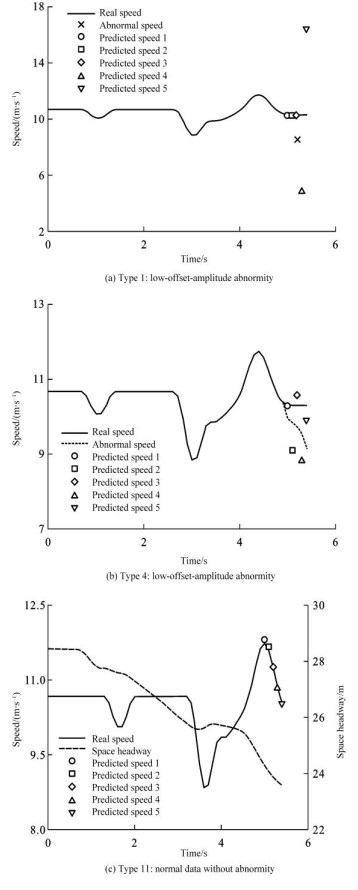
表 8 可信甄别模块异常数据甄别结果
Table 8. Discrimination results of abnormal data in credibility discrimination module
甄别结果 低偏移幅度 高偏移幅度 异常数 准确率/% 异常数 准确率/% 类型1 456 97.0 470 100.0 类型2 470 100.0 470 100.0 类型3 470 100.0 470 100.0 类型4 459 97.7 470 100.0 类型5 227 48.3 468 99.6 正常数据 异常数 5 误报率/% 1.1
下载: 导出CSV
1. Parameters of input data for SVM

2. Confusion matrix of SVM binary classifier on training set

3. Confusion matrix of SVM binary classifier on testing set

4. Parameters of LSTM neural network structure and training

5. Indices for model evaluation

6. Classification of testing dataset

7. Confusion matrix of vehicle driving state recognition results in starting module

8. Discrimination results of abnormal data in credibility discrimination module

-
[1] 张毅, 姚丹亚, 李力, 等. 智能车路协同系统关键技术与应用[J]. 交通运输系统工程与信息, 2021, 21(5): 40-51. https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT202105006.htmZHANG Yi, YAO Dan-ya, LI Li, et al. Technologies and applications for intelligent vehicle-infrastructure cooperation systems[J]. Transportation Systems Engineering and Information Technology, 2021, 21(5): 40-51. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT202105006.htm [2] MIYAJIMA C, NISHIWAKI Y, OZAWA K, et al. Driver modeling based on driving behavior and its evaluation in driver identification[J]. Proceedings of the IEEE, 2007, 95(2): 427-437. doi: 10.1109/JPROC.2006.888405 [3] WANG Da-jun, PEI Xin, LI Li, et al. Risky driver recognition based on vehicle speed time series[J]. IEEE Transactions on Human-Machine Systems, 2018, 48(1): 63-71. doi: 10.1109/THMS.2017.2776605 [4] NEWELL G F. A simplified car-following theory: a lower order model[J]. Transportation Research Part B: Methodological, 2002, 36(3): 195-205. doi: 10.1016/S0191-2615(00)00044-8 [5] YEO H. Asymmetric microscopic driving behavior theory[D]. Berkeley: University of California, 2008. [6] WEI Da-li, LIU Hong-chao. Analysis of asymmetric driving behavior using a self-learning approach[J]. Transportation Research Part B: Methodological, 2013, 47: 1-14. doi: 10.1016/j.trb.2012.09.003 [7] WONG W, HUANG Shi-hong, FENG Yi-heng, et al. Trajectory-based hierarchical defense model to detect cyber-attacks on transportation infrastructure[R]. Washington DC: Transportation Research Board, 2019. [8] HUANG S E, FENG Yi-heng, LIU H X. A data-driven method for falsified vehicle trajectory identification by anomaly detection[J]. Transportation Research Part C: Emerging Technologies, 2021, 128: 103196. doi: 10.1016/j.trc.2021.103196 [9] 祝俪菱, 刘澜, 赵新朋, 等. 基于支持向量机的车辆驾驶行为识别研究[J]. 交通运输系统工程与信息, 2017, 17(1): 91-97. https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201701015.htmZHU Li-ling, LIU Lan, ZHAO Xin-peng, et al. Driver behavior recognition based on support vector machine[J]. Journal of Transportation Systems Engineering and Information Technology, 2017, 17(1): 91-97. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201701015.htm [10] 戢晓峰, 卢梦媛, 覃文文. 货车移动遮断影响下的小客车驾驶行为识别[J]. 交通运输系统工程与信息, 2021, 21(5): 174-182. https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT202105018.htmJI Xiao-feng, LU Meng-yuan, QIN Wen-wen, et al. Passenger cars driving behaviors recognition under truck movement interruption[J]. Journal of Transportation Systems Engineering and Information Technology, 2021, 21(5): 174-182. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT202105018.htm [11] BRACKSTONE M, MCDONALD M. Car-following: a historical review[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 1999, 2(4): 181-196. doi: 10.1016/S1369-8478(00)00005-X [12] 王殿海, 金盛. 车辆跟驰行为建模的回顾与展望[J]. 中国公路学报, 2012, 25(1): 115-127. doi: 10.3969/j.issn.1001-7372.2012.01.018WANG Dian-hai, JIN Sheng. Review and outlook of modeling of car following behavior[J]. China Journal of Highway and Transport, 2012, 25(1): 115-127. (in Chinese) doi: 10.3969/j.issn.1001-7372.2012.01.018 [13] CHANDLER R E, HERMAN R, MONTROLL E W. Traffic dynamics: studies in car following[J]. Operations Research, 1958, 6(2): 165-184. doi: 10.1287/opre.6.2.165 [14] GIPPS P G. A behavioural car-following model for computer simulation[J]. Transportation Research Part B: Methodological, 1981, 15(2): 105-111. doi: 10.1016/0191-2615(81)90037-0 [15] KIKUCHI S, CHAKROBORTY P. Car-following model based on fuzzy inference system[J]. Transportation Research Record, 1992(1365): 82-91. [16] 杨达, 蒲云, 祝俪菱, 等. 改进的基于安全距离的车辆跟驰模型[J]. 北京工业大学学报, 2013, 39(9): 1335-1342. https://www.cnki.com.cn/Article/CJFDTOTAL-BJGD201309009.htmYANG Da, PU Yun, ZHU Li-ling, et al. Improved safe distance car-following model[J]. Journal of Beijing University of Technology, 2013, 39(9): 1335-1342. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-BJGD201309009.htm [17] 杨龙海, 赵顺, 罗沂. 基于期望跟驰间距的跟驰模型研究[J]. 武汉理工大学学报(交通科学与工程版), 2016, 40(4): 580-584, 591. doi: 10.3963/j.issn.2095-3844.2016.04.003YANG Long-hai, ZHAO Shun, LUO Yi. Car-following model based on expected headway[J]. Journal of Wuhan University of Technology (Transportation Science and Engineering), 2016, 40(4): 580-584, 591. (in Chinese) doi: 10.3963/j.issn.2095-3844.2016.04.003 [18] 杨龙海, 王晖, 李帅, 等. 改进分子动力学的车辆跟驰模型[J]. 重庆大学学报, 2021, 44(7): 26-33. https://www.cnki.com.cn/Article/CJFDTOTAL-FIVE202107003.htmYANG Long-hai, WANG Hui, LI Shuai, et al. Car-following model with improved molecular dynamics[J]. Journal of Chongqing University, 2021, 44(7): 26-33. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-FIVE202107003.htm [19] 邱小平, 孙若晓, 杨达, 等. 考虑速度对期望间距影响的车辆跟驰模型研究[J]. 计算机应用研究, 2015, 32(6): 1649-1652. doi: 10.3969/j.issn.1001-3695.2015.06.011QIU Xiao-ping, SUN Ruo-xiao, YANG Da, et al. Consider impact of speed on desired distance car-following model[J]. Application Research of Computers, 2015, 32(6): 1649-1652. (in Chinese) doi: 10.3969/j.issn.1001-3695.2015.06.011 [20] ELAMRANI ABOU ELASSAD Z, MOUSANNIF H, AL MOATASSIME H, et al. The application of machine learning techniques for driving behavior analysis: a conceptual framework and a systematic literature review[J]. Engineering Applications of Artificial Intelligence, 2020, 87: 103312. doi: 10.1016/j.engappai.2019.103312 [21] WANG Xiao, JIANG Rui, LI Li, et al. Capturing car-following behaviors by deep learning[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(3): 910-920. doi: 10.1109/TITS.2017.2706963 [22] HUANG Xiu-ling, SUN Jie, SUN Jian. A car-following model considering asymmetric driving behavior based on long short-term memory neural networks[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 346-362. doi: 10.1016/j.trc.2018.07.022 [23] HOCHREITER S, SCHMIDHUBER J. Long short-term memory[J]. Neural Computation, 1997, 9(8): 1735-1780. doi: 10.1162/neco.1997.9.8.1735 [24] HE Zheng-bing. Research based on high-fidelity NGSIM vehicle trajectory datasets: a review[R]. Beijing: Beijing University of Technology, 2017. [25] THIEMANN C, CHRISTIAN M, KESTING A, et al. Estimating acceleration and lane-changing dynamics from next generation simulation trajectory data[J]. Transportation Research Record, 2008(2088): 90-101. [26] 李依, 赵建有, 叶云涛. NGSIM轨迹重构研究综述[J]. 汽车实用技术, 2021, 46(4): 204-208. https://www.cnki.com.cn/Article/CJFDTOTAL-SXQC202104063.htmLI Yi, ZHAO Jian-you, YE Yun-tao. A review of NGSIM trajectory reconstruction[J]. Automobile Applied Technology, 2021, 46(4): 204-208. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-SXQC202104063.htm [27] DING Chen-xi, WANG Wu-hong, WANG Xiao, et al. A neural network model for driver's lane-changing trajectory prediction in urban traffic flow[J]. Mathematical Problems in Engineering, 2013, 2013: 967358. [28] TANG Jun-jun, LIU Fang, ZHANG Wen-hui, et al. Lane-changes prediction based on adaptive fuzzy neural network[J]. Expert Systems with Applications, 2018, 91: 452-463. doi: 10.1016/j.eswa.2017.09.025 [29] 许伦辉, 胡三根, 伍帅, 等. 考虑车辆运行特性的双车道超车模型[J]. 华南理工大学学报(自然科学版), 2015, 43(4): 7-13, 27. https://www.cnki.com.cn/Article/CJFDTOTAL-HNLG201504003.htmXU Lun-hui, HU San-gen, WU Shuai, et al. Overtaking model for two-lane highway considering vehicle running characteristics[J]. Journal of South China University of Technology (Natural Science Edition), 2015, 43(4): 7-13, 27. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HNLG201504003.htm [30] 李峰, 陈新. 基于LTE-V2X技术的PKI系统架构探讨[J]. 信息技术与网络安全, 2020, 39(7): 41-47. https://www.cnki.com.cn/Article/CJFDTOTAL-WXJY202007007.htmLI Feng, CHEN Xin. PKI infrastructure architecture based on LTE-V2X[J]. Information Technology and Network Security, 2020, 39(7): 41-47. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-WXJY202007007.htm -






 点击查看大图
点击查看大图

计量
- 文章访问数: 1217
- HTML全文浏览量: 423
- PDF下载量: 126
- 被引次数: 0
