

Traffic capacity enhancement strategy for urban expressway diversion area under vehicle-infrastructure cooperative environment
-
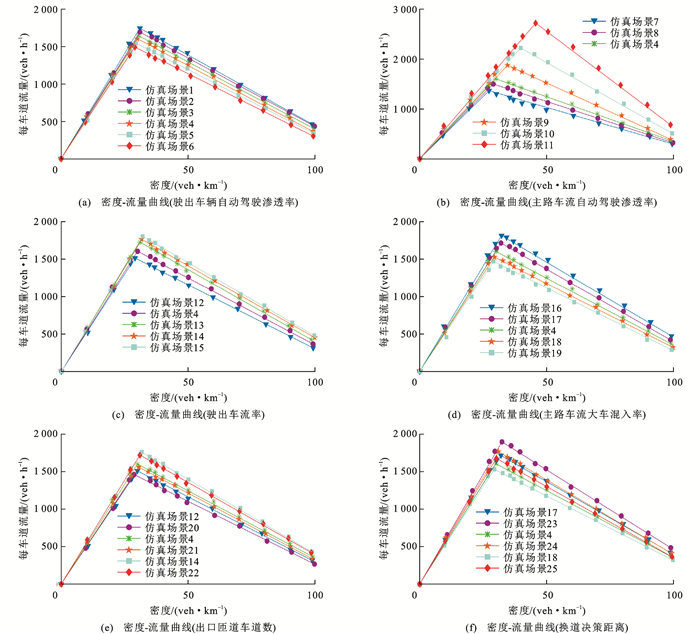
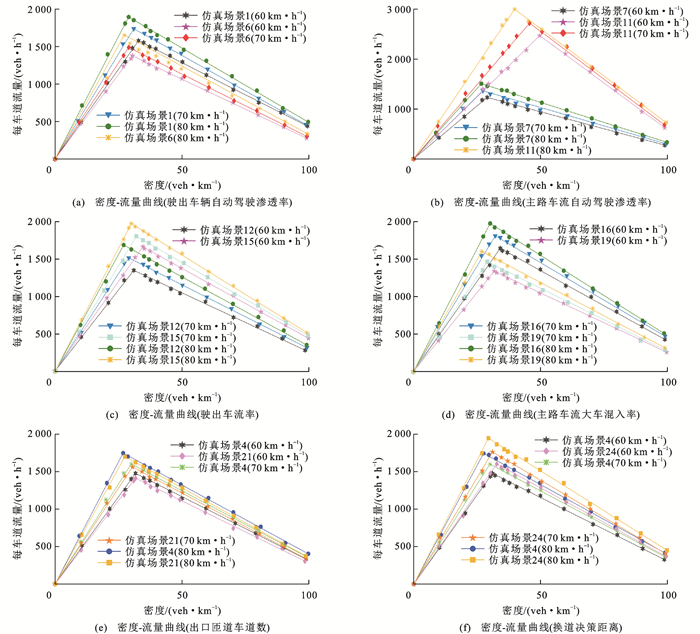
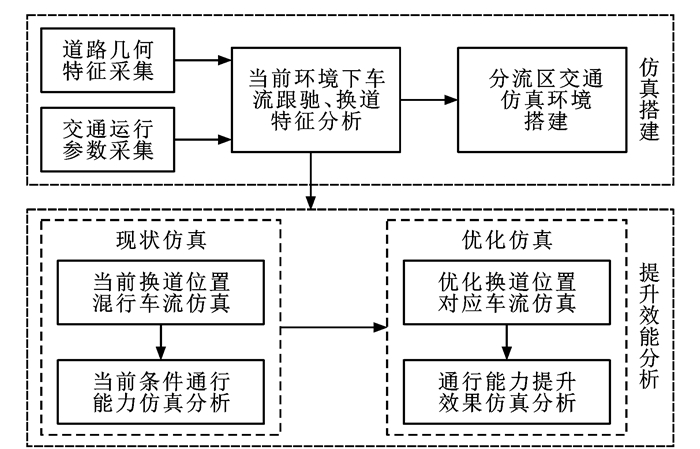
摘要: 根据车路协同环境城市快速路分流区不同车型的自动、人工驾驶混合车流特征,引入动态加速度、可变换道概率改进元胞自动机模型车流运行规则;设计了考虑主路自动驾驶渗透率、大型车混入率、驶出自动驾驶渗透率、驶出车流率、出口匝道车道数、换道决策点距离等因素耦合作用的分流区换道仿真试验;对比分析了多因素耦合作用下驶出车辆自由换道率、平均换道距离等指标影响程度,研究了城市快速路分流区道路通行能力变化规律;提出了基于可变换道决策点距离的分流区道路混合车流通行能力提升策略。研究结果表明:分流区驶出车辆自由换道率越高,道路通行能力越大;主路车流自动驾驶渗透率对通行能力的影响最为显著,自动驾驶环境可达到人工驾驶环境道路通行能力的2倍;出口匝道车道数对通行能力的影响不显著,2条出口匝道比1条出口匝道的通行能力提升约3%;换道决策点距离对通行能力的影响较为显著,车辆换道决策点距离从100 m增加到150 m时,分流区道路通行能力可提高9.6%~10.6%。可见,可借助移动式交通标志提前引导车辆换道决策,显著提高分流区道路通行能力。Abstract: According to the mixed traffic flow characteristics of vehicles including different types of automatic vehicles (AVs) and human-driven vehicles (HVs) in the urban expressway diversion area under a vehicle-infrastructure cooperative environment, the dynamic acceleration and variable lane-changing probability were introduced to improve the traffic flow rules of a cellular automata model. The lane-changing simulation experiments in the diversion area were designed by considering the coupling influence of factors such as the penetration rate of AVs on the main road, proportion of large vehicles, penetration rate of off-ramp AVs, rate of off-ramp vehicles, number of off-ramp lanes, and distance before lane-changing. The influences of indicators including the free lane-changing rate and average distance before lane-changing of off-ramp vehicles were compared and analyzed under multi-factor coupling actions, and change rules of road capacity of the urban expressway diversion area were studied. On the basis of the variable distance before lane-changing, a strategy for improving the road capacity of the diversion area with mixed traffic flows was proposed. Analysis results show that the road capacity improves as the free lane-changing rate of off-ramp vehicles in the diversion area increases. The penetration rate of AVs on the main road has the most significant impact on the road capacity, and the road capacity under the environment with fully AVs is twice that under the environment with fully HVs. The impact of the number of off-ramp lanes on the road capacity is not significant, and the road capacity of two off-ramp lanes improves by about 3%, compared with that of one off-ramp lane. The distance before lane-changing greatly affects the road capacity, and the road capacity of the diversion area enhances by 9.6%-10.6% when the distance before lane-changing increases from 100 m to 150 m. Therefore, mobile traffic signs can be utilized to guide vehicles to change lanes in advance, which can significantly enhance the traffic capacity of the diversion area. 1 tab, 20 figs, 31 refs.
-

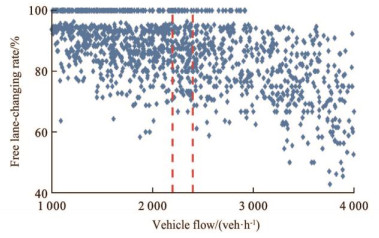
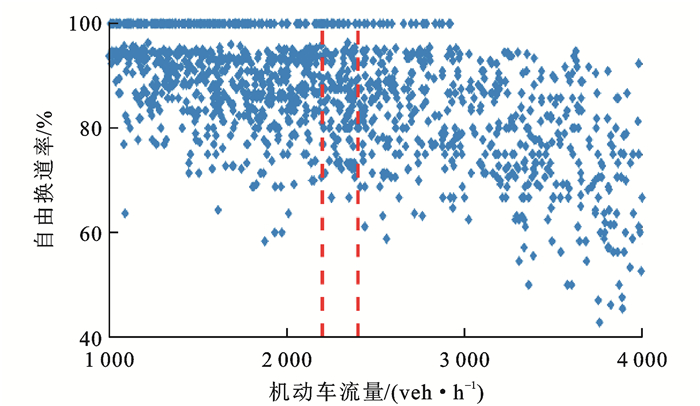
图 1 仿真场景4的流量-自由换道率散点分布
Figure 1. Scatter distribution of flow-Rf for simulation scenario 4

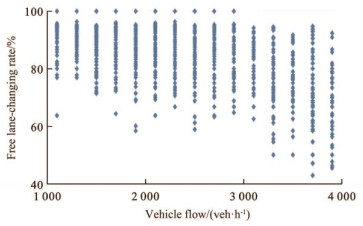
图 2 仿真场景4的流量-自由换道率区段分布
Figure 2. Section distribution of flow-Rf for simulation scenario 4

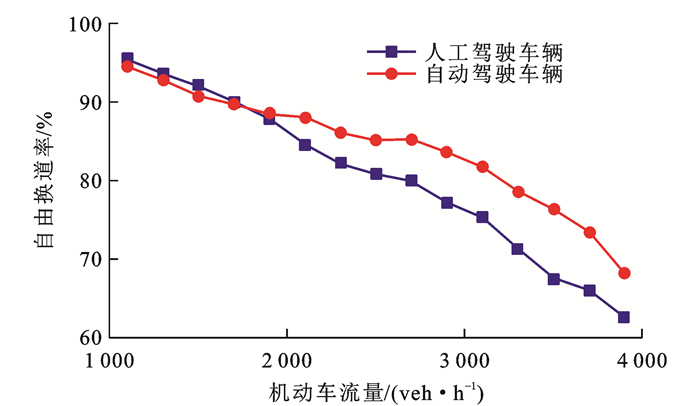
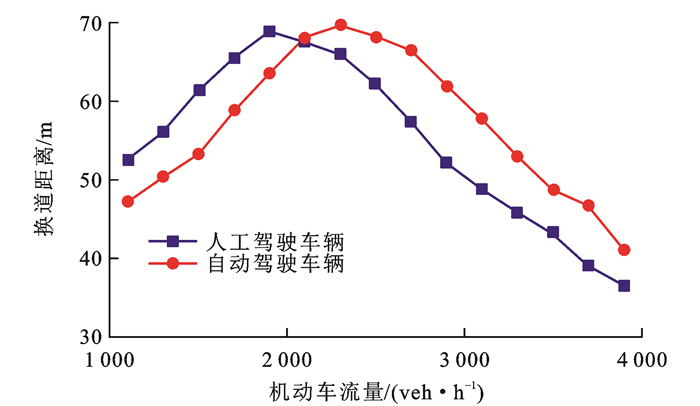
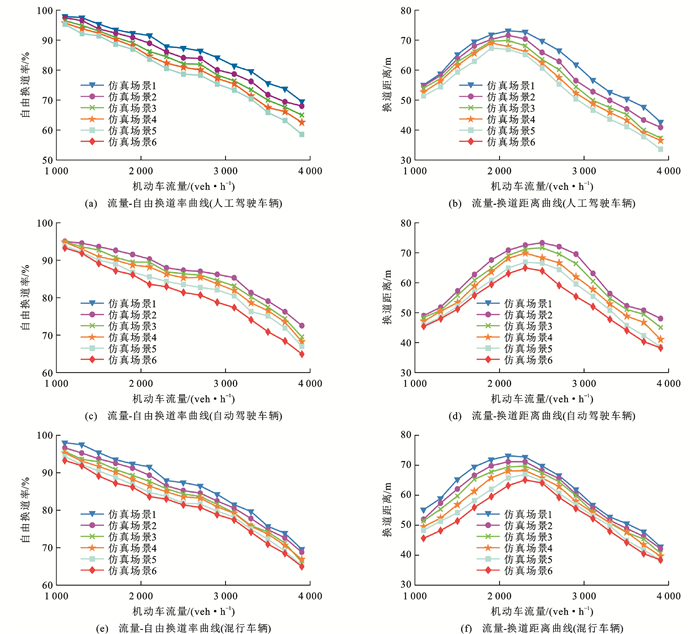
图 5 不同Ro水平下人工、自动、混行车辆换道特征拟合曲线
Figure 5. Fitting curves of lane-changing characteristics for AVs, HVs and MVs under different Ro levels

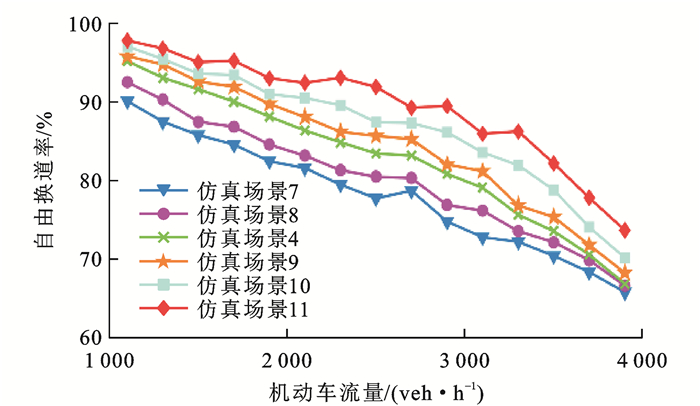
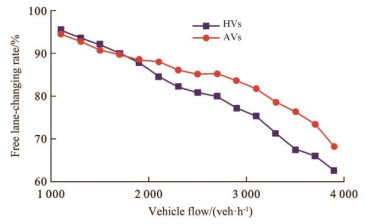
图 6 不同Ra水平下混行车辆流量-自由换道率拟合曲线
Figure 6. Fitting curves of flow-Rf for MVs under different Ra levels

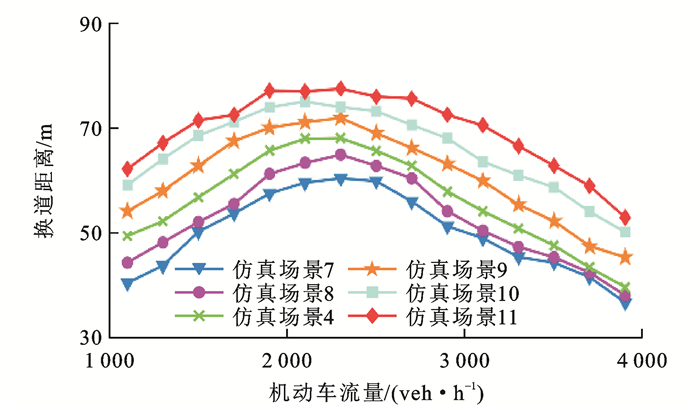
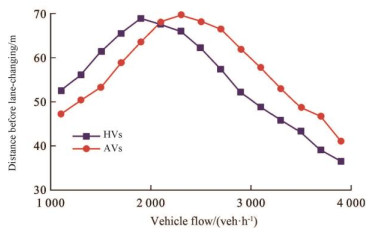
图 7 不同Ra水平下混行车辆流量-换道距离拟合曲线
Figure 7. Fitting curves of flow-d for MVs under different Ra levels

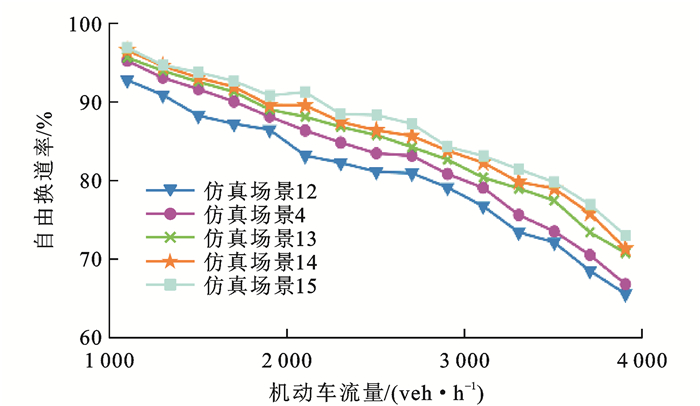
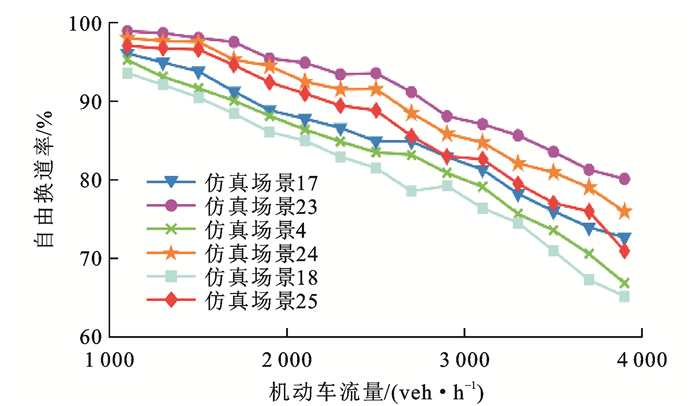
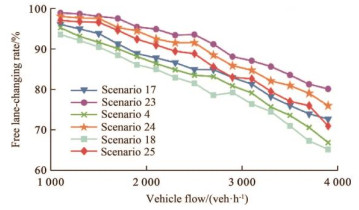
图 8 不同Rl水平下混行车辆流量-自由换道率拟合曲线
Figure 8. Fitting curves of flow-Rf for MVs under different Rl levels

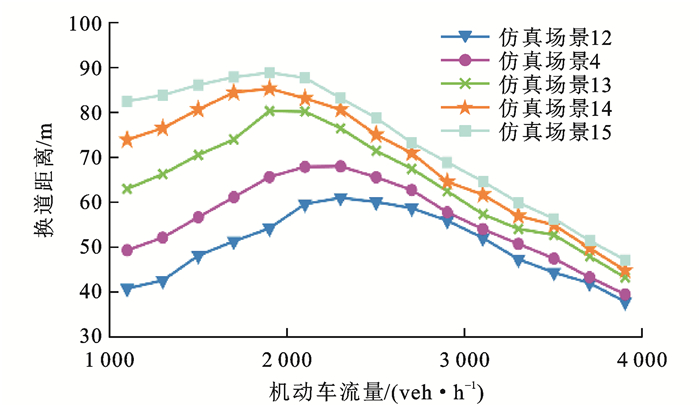
图 9 不同Rl水平下混行车辆流量-换道距离拟合曲线
Figure 9. Fitting curves of flow-d for MVs under different Rl levels

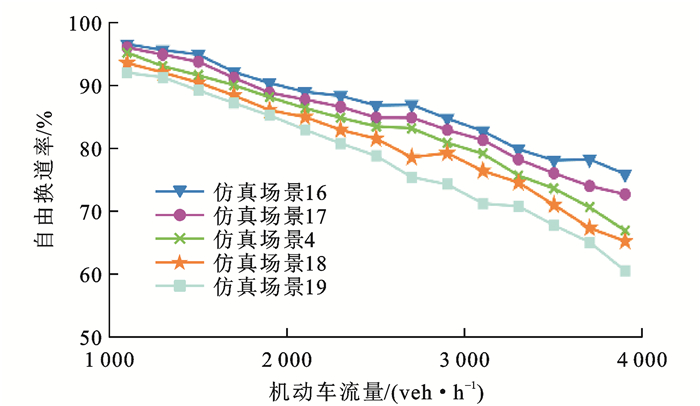
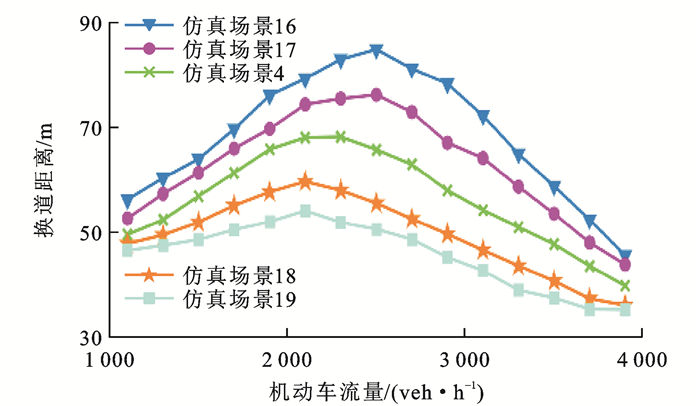
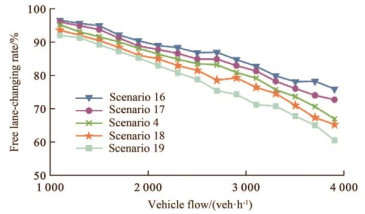
图 10 不同Rt水平下混行车辆流量-自由换道率拟合曲线
Figure 10. Fitting curves of flow-Rf for MVs under different Rt levels

图 11 不同Rt水平下混行车辆流量-换道距离拟合曲线
Figure 11. Fitting curves of flow-d for MVs under different Rt levels

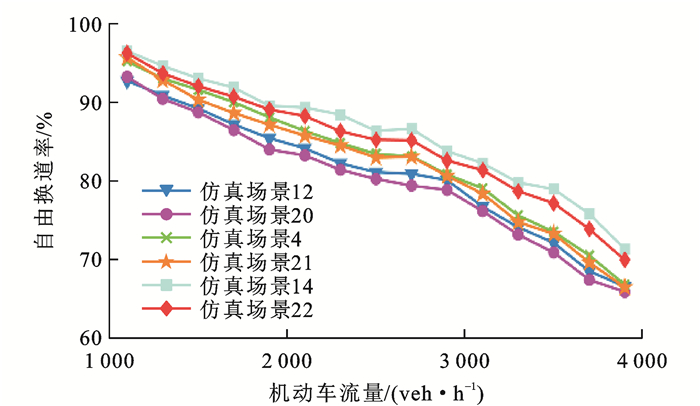
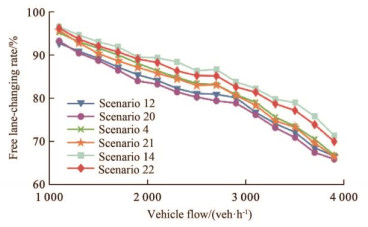
图 12 不同nl水平下混行车辆流量-自由换道率拟合曲线
Figure 12. Fitting curves of flow-Rf for MVs under different nl levels

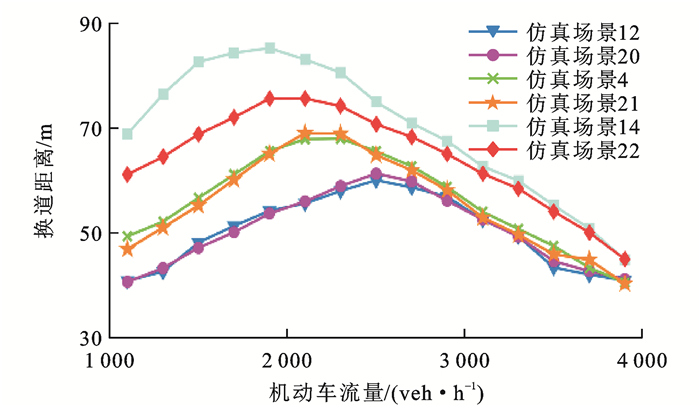
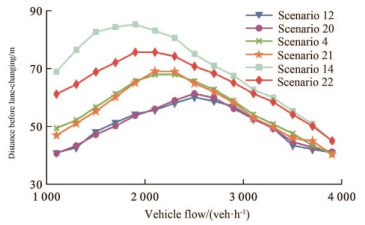
图 13 不同nl水平下混行车辆流量-换道距离拟合曲线
Figure 13. Fitting curves of flow-d for MVs under different nl levels

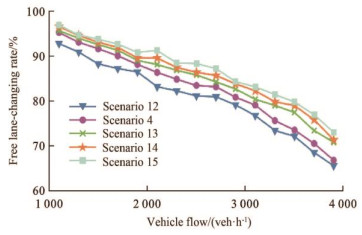
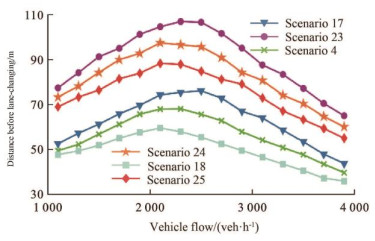
图 14 不同L水平下混行车辆流量-自由换道率拟合曲线
Figure 14. Fitting curves of flow-Rf for MVs under different L levels

图 15 不同L水平下混行车辆流量-换道距离拟合曲线
Figure 15. Fitting curves of flow-d for MVs under different L levels

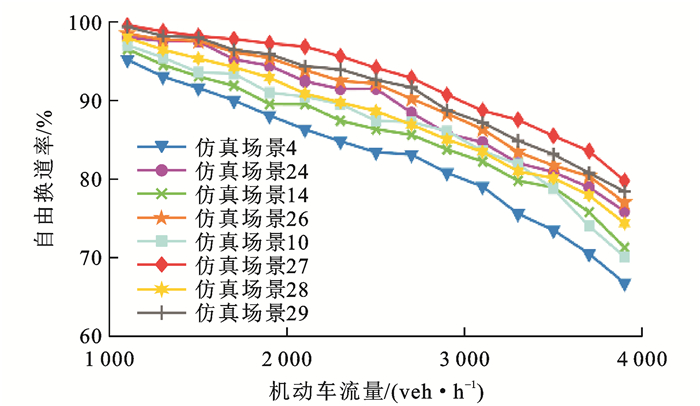
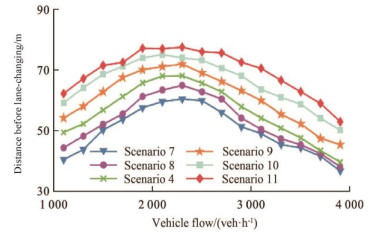
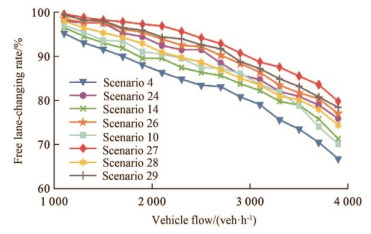
图 16 不同Rt、nl、L混行车辆流量-自由换道率拟合曲线
Figure 16. Fitting curves of flow-Rf for MVs under different Rt, nl and L

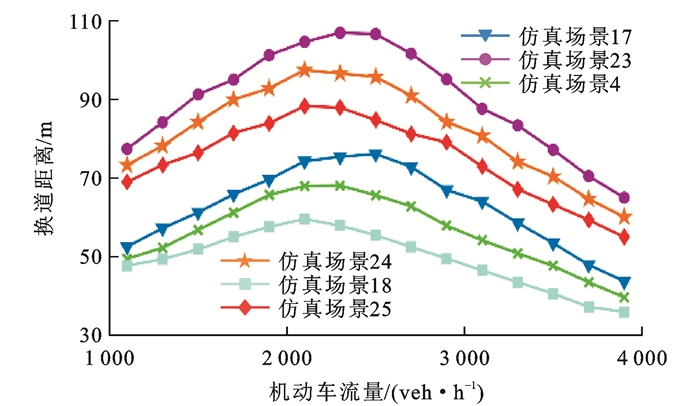
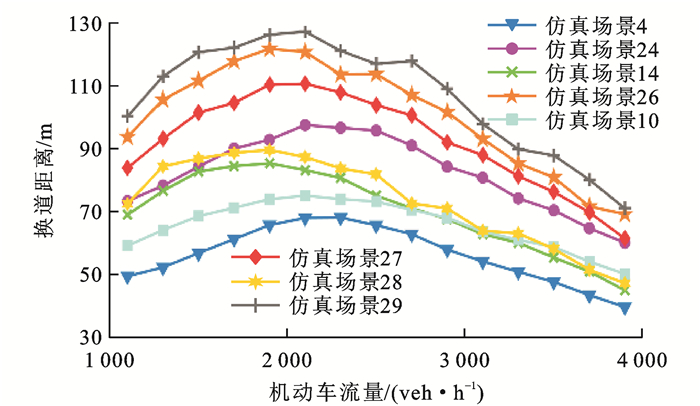
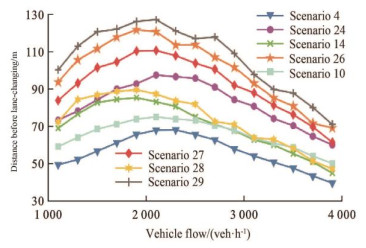
图 17 不同Rt、nl、L混行车辆流量-换道距离拟合曲线
Figure 17. Fitting curves of flow-d for MVs under different Rt, nl and L

图 18 不同因素(Ro、Ra、Rl、Rt、nl、L)影响下分流区仿真拟合
Figure 18. Diversion areas simulation fitting under influences of different factors (Ro, Ra, Rl, Rt, nl and L)

图 19 不同限速(60、70、80 km·h-1)影响下分流区仿真拟合
Figure 19. Diversion areas simulation fitting under influences of different speed limits (60, 70, 80 km·h-1)

5. Fitted curves of lane-changing characteristics for AVs, HVs, and MVs under different Ro

18. Fitted curves of diversion areas under different factors (Ro, Ra, Rl, Rt, nl, and L)
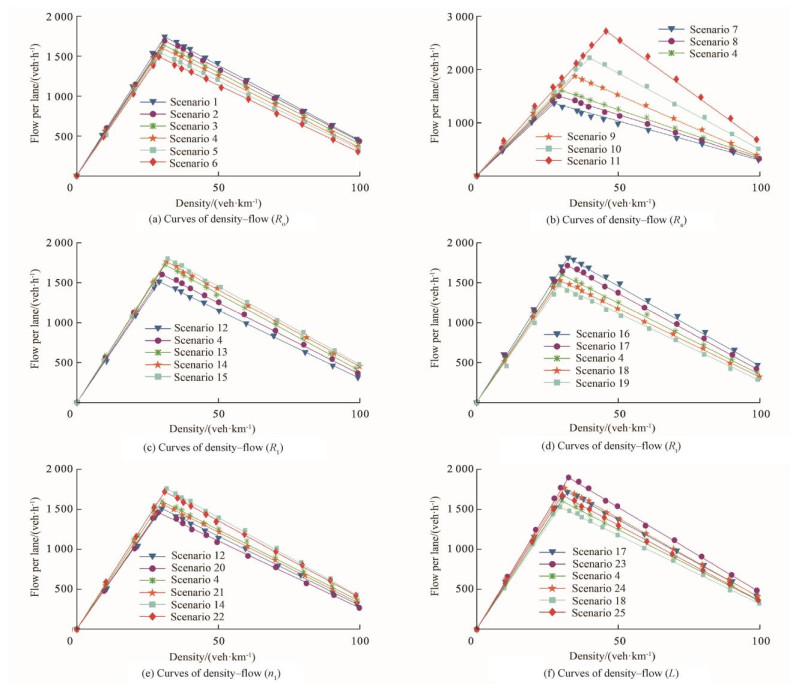
表 1 29种仿真场景的参数
Table 1. Parameters of 29 simulation scenarios
仿真场景 Rt/% Ra/% Ro/% Rl/% nl L/m 1 20 40 0 4 1 100 2 20 40 20 4 1 100 3 20 40 40 4 1 100 4 20 40 60 4 1 100 5 20 40 80 4 1 100 6 20 40 100 4 1 100 7 20 0 0 4 1 100 8 20 20 60 4 1 100 9 20 60 60 4 1 100 10 20 80 60 4 1 100 11 20 100 60 4 1 100 12 20 40 60 2 1 100 13 20 40 60 6 1 100 14 20 40 60 8 1 100 15 20 40 60 10 1 100 16 10 40 60 4 1 100 17 15 40 60 4 1 100 18 25 40 60 4 1 100 19 30 40 60 4 1 100 20 20 40 60 2 2 100 21 20 40 60 4 2 100 22 20 40 60 8 2 100 23 15 40 60 4 1 150 24 20 40 60 4 1 150 25 25 40 60 4 1 150 26 20 40 60 8 1 150 27 20 80 60 4 1 150 28 20 80 60 8 1 100 29 20 80 60 8 1 150  下载: 导出CSV
下载: 导出CSV
1. Parameters of 29 simulation scenarios

-
[1] DAI Zhuang, LIU Xiao-yue, CHEN Xi, et al. Joint optimization of scheduling and capacity for mixed traffic with autonomous and human-driven buses: a dynamic programming approach[J]. Transportation Research Part C: Emerging Technologies, 2020, 114(5): 598-619. [2] YE Lan-hang, YAMAMOTO T. Modeling connected and autonomous vehicles in heterogeneous traffic flow[J]. Physica A: Statistical Mechanics and Its Applications, 2018, 490(1): 269-277. [3] 赵祥模, 承靖钧, 徐志刚, 等. 基于整车在环仿真的自动驾驶汽车室内快速测试平台[J]. 中国公路学报, 2019, 32(6): 124-136. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906014.htmZHAO Xiang-mo, CHENG Jing-jun, XU Zhi-gang, et al. An indoor rapid-testing platform for autonomous vehicle based on vehicle-in-the-loop simulation[J]. China Journal of Highway and Transport, 2019, 32(6): 124-136. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906014.htm [4] 秦严严, 张健, 陈凌志, 等. 手动-自动驾驶混合交通流元胞传输模型[J]. 交通运输工程学报, 2020, 20(2): 229-238. doi: 10.19818/j.cnki.1671-1637.2020.02.019QIN Yan-yan, ZHANG Jian, CHEN Ling-zhi, et al. Cell transmission model of mixed traffic flow of manual-automated driving[J]. Journal of Traffic and Transportation Engineering, 2020, 20(2): 229-238. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2020.02.019 [5] MIRHELI A, HAJIBABAI L, HAJBABAIE A. Development of a signal-head-free intersection control logic in a fully connected and autonomous vehicle environment[J]. Transportation Research Part C: Emerging Technologies, 2018, 92(7): 412-425. [6] XIAO Lin, WANG Meng, AREM B V. Traffic flow impacts of converting an HOV lane into a dedicated CACC lane on a freeway corridor[J]. IEEE Intelligent Transportation Systems Magazine, 2020, 12(1): 60-73. doi: 10.1109/MITS.2019.2953477 [7] 姚佼, 倪屹聆, 戴亚轩. 车联网环境对城市快速路驾驶安全的影响评价[J]. 交通运输研究, 2020, 6(2): 83-90. https://www.cnki.com.cn/Article/CJFDTOTAL-JTBH202002010.htmYAO Jiao, NI Yi-ling, DAI Ya-xuan. Influence evaluation of internet of vehicles environment on driving safety of urban expressway[J]. Transport Research, 2020, 6(2): 83-90. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JTBH202002010.htm [8] WU Wei, ZHANG Fang-ni, LIU Wei, et al. Modelling the traffic in a mixed network with autonomous-driving expressways andnon-autonomous local streets[J]. Transportation Research Part E: Logistics and Transportation Review, 2020, 134(2): 101855. [9] WANG Yun-peng, WEI Lei, CHEN Peng. Trajectory reconstruction for freeway traffic mixed with human-driven vehicles and connected and automated vehicles[J]. Transportation Research Part C: Emerging Technologies, 2020, 111(2): 135-155. [10] CHEN Jian-zhong, ZHOU Yang, LIANG Huan. Effects of ACC and CACC vehicles on traffic flow based on an improved variable time headway spacing strategy[J]. IET Intelligent Transport Systems, 2019, 13(9): 1365-1373. doi: 10.1049/iet-its.2018.5296 [11] LI Lin-heng, GAN Jing, JI Xin-kai, et al. Dynamic driving risk potential field model under the connected and automated vehicles environment and its application in car-following modeling[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, DOI: 10.1109/TITS.2020.3008284. [12] BEKIARIS-LIBERIS N, RONCOLI C, PAPAGEORGIOU M. Highway traffic state estimation per lane in the presence of connected vehicles[J]. Transportation Research Part B: Methodological, 2017, 106(12): 1-28. [13] HU Xiang-wang, SUN Jian. Trajectory optimization of connected and autonomous vehicles at a multilane freeway merging area[J]. Transportation Research Part C: Emerging Technologies, 2019, 101: 111-125. doi: 10.1016/j.trc.2019.02.016 [14] ZHU Feng, UKKUSURI S V. An optimal estimation approach for the calibration of the car-following behavior of connected vehicles in a mixed traffic environment[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(2): 282-291. doi: 10.1109/TITS.2016.2568759 [15] ZHAO Xiang-mo, WANG Zhen, XU Zhi-gang, et al. Field experiments on longitudinal characteristics of human driver behavior following an autonomous vehicle[J]. Transportation Research Part C: Emerging Technologies, 2020, 114(5): 205-224. [16] SUN Jie, ZHENG Zu-duo, SUN Jian. Stability analysis methods and their applicability to car-following models in conventional and connected environments[J]. Transportation Research Part B: Methodological, 2018, 109(3): 212-237. [17] ALI Y, ZHENG Zu-duo, HAQUE M M, et al. A game theory-based approach for modelling mandatory lane-changing behaviour in a connected environment[J]. Transportation Research Part C: Emerging Technologies, 2019, 106(9): 220-242. [18] SHI Xiao-wei, LI Xiao-peng. Constructing a fundamental diagram for traffic flow with automated vehicles: methodology and demonstration[J]. Transportation Research Part B: Methodological, 2021, 150: 279-292. doi: 10.1016/j.trb.2021.06.011 [19] YANG Da, ZHENG Shi-yu, WEN Cheng, et al. A dynamic lane-changing trajectory planning model for automated vehicles[J]. Transportation Research Part C: Emerging Technologies, 2018, 95(10): 228-247. [20] 张毅, 姚丹亚, 李力, 等. 智能车路协同系统关键技术与应用[J]. 交通运输系统工程与信息, 2021, 21(5): 40-51. https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT202105006.htmZHANG Yi, YAO Dan-ya, LI Li, et al. Technologies and applications for intelligent vehicle-infrastructure cooperation systems[J]. Journal of Transportation Systems Engineering and Information Technology, 2021, 21(5): 40-51. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT202105006.htm [21] 徐志刚, 李金龙, 赵祥模, 等. 智能公路发展现状与关键技术[J]. 中国公路学报, 2019, 32(8): 1-24. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201908002.htmXU Zhi-gang, LI Jin-long, ZHAO Xiang-mo, et al. A review on intelligent road and its related key technologies[J]. China Journal of Highway and Transport, 2019, 32(8): 1-24. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201908002.htm [22] XIE Yuan-chang, ZHANG Hui-xing, GARTNER N H, et al. Collaborative merging strategy for freeway ramp operations in a connected and autonomous vehicles environment[J]. Journal of Intelligent Transportation Systems, 2017, 21(2): 136-147. doi: 10.1080/15472450.2016.1248288 [23] LETTER C, ELEFTERIADOU L. Efficient control of fully automated connected vehicles at freeway merge segments[J]. Transportation Research Part C: Emerging Technologies, 2017, 80: 190-205. doi: 10.1016/j.trc.2017.04.015 [24] LIU Hao, KAN Xing-an, SHLADOVER S E, et al. Impact of cooperative adaptive cruise control on multilane freeway merge capacity[J]. Journal of Intelligent Transportation Systems, 2018, 22(3): 263-275. doi: 10.1080/15472450.2018.1438275 [25] DONG Chang-yin, WANG Hao, LI Ye, et al. Route control strategies for autonomous vehicles exiting to off-ramps[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(7): 3104-3116. doi: 10.1109/TITS.2019.2925319 [26] 杨敏, 王立超, 张健, 等. 面向智慧高速的合流区协作车辆冲突解脱协调方法[J]. 交通运输工程学报, 2020, 20(3): 217-224. doi: 10.19818/j.cnki.1671-1637.2020.03.020YANG Min, WANG Li-chao, ZHANG Jian, et al. Collaborative method of vehicle conflict resolution in merging area for intelligent expressway[J]. Journal of Traffic and Transportation Engineering, 2020, 20(3): 217-224. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2020.03.020 [27] SUN Zhan-bo, HUANG Tian-yu, ZHANG Pei-tong. Cooperative decision-making for mixed traffic: a ramp merging example[J]. Transportation Research Part C: Emerging Technologies, 2020, 120: 102764. doi: 10.1016/j.trc.2020.102764 [28] YANG Da, QIU Xiao-ping, MA Li-na, et al. Cellular automata-based modeling and simulation of a mixed traffic flow of manual and automated vehicles[J]. Transportation Research Record, 2017(2622): 105-116. [29] LIU Mei-yu, SHI Jing. A cellular automata traffic flow model combined with a BP neural network based microscopic lane changing decision model[J]. Journal of Intelligent Transportation Systems, 2019, 23(4): 309-318. doi: 10.1080/15472450.2018.1462176 [30] 余荣杰, 田野, 孙剑. 高等级自动驾驶汽车虚拟测试: 研究进展与前沿[J]. 中国公路学报, 2020, 33(11): 125-138. doi: 10.3969/j.issn.1001-7372.2020.11.012YU Rong-jie, TIAN Ye, SUN Jian. Highly automated vehicle virtual testing: a review of recent developments and research frontiers[J]. China Journal of Highway and Transport, 2020, 33(11): 125-138. (in Chinese) doi: 10.3969/j.issn.1001-7372.2020.11.012 [31] 宗芳, 王猛, 曾梦, 等. 考虑多前车作用势的混行交通流车辆跟驰模型[J]. 交通运输工程学报, 2022, 22(1): 250-262. doi: 10.19818/j.cnki.1671-1637.2022.01.021ZONG Fang, WANG Meng, ZENG Meng, et al. Vehicle-following model in mixed traffic flow considering interaction potential of multiple front vehicles[J]. Journal of Traffic and Transportation Engineering, 2022, 22(1): 250-262. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2022.01.021 -








 点击查看大图
点击查看大图
计量
- 文章访问数: 1086
- HTML全文浏览量: 370
- PDF下载量: 147
- 被引次数: 0
