

Distributed cooperative decision-making method for vehicle swarms in large-scale road networks
-
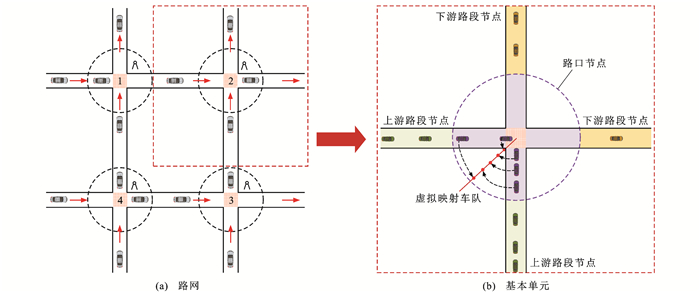
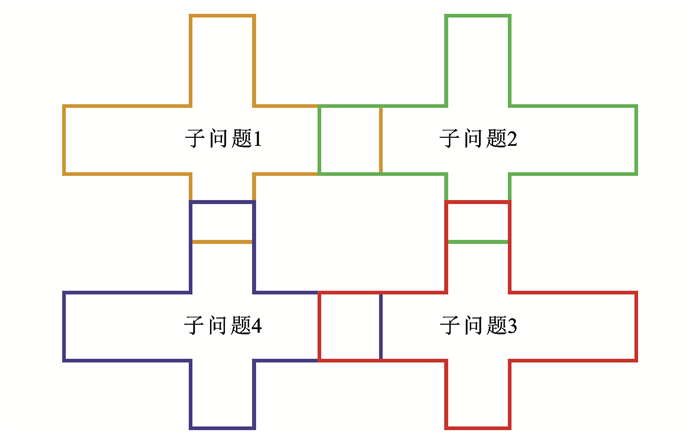
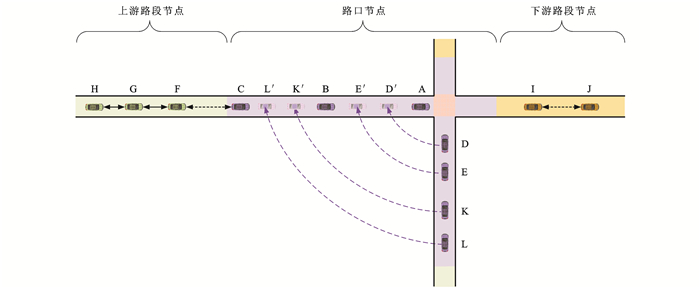
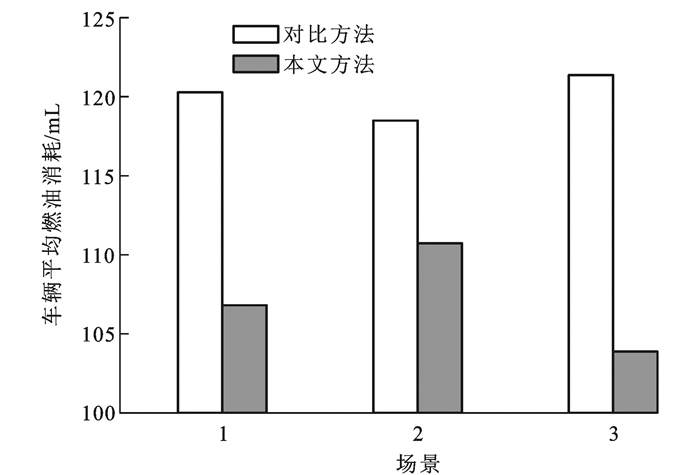
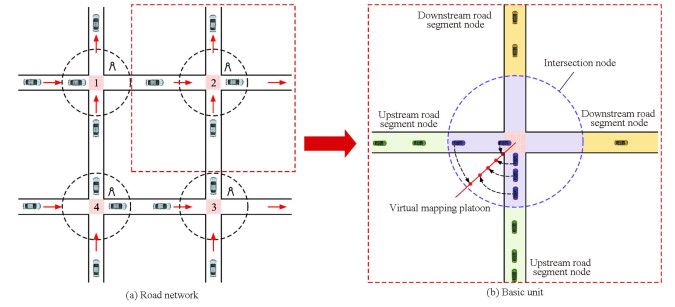
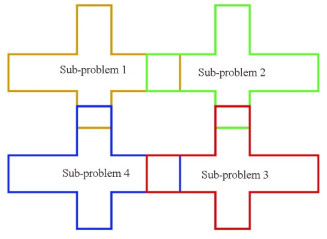
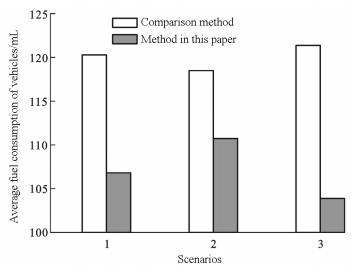
摘要: 为解决车路协同环境下大规模路网中车辆群体协同决策问题,提出了分布式车辆群体协同决策方法;在深入分析交通控制特性的基础上,构建了路网分解模型,将大规模协同决策问题分解成若干个同质小规模子问题,每个子问题覆盖了上游路段、路口和下游路段这3类不同交通区域;基于虚拟车辆映射技术构建了车辆群体协同决策模型,将路口区域二维车辆群体协同决策问题转化为一维问题;与路段区域内车辆群体协同决策方式相同,在路口区域内通过控制虚拟车队中车辆的等效车头时距来完成车辆之间的交互和冲突消解,进而采用统一的协同决策参数来解决各子问题中不同区域内车辆群体的协同决策问题;基于不同区域内车辆群体协同决策参数的统一化,设计了上、下游区域之间的协作机制来保证上游车辆在充分考虑下游交通状态的基础上做出合适的驾驶决策。仿真结果表明:在不同的交通需求设置下,采用提出的方法后,车辆在通过冲突区的过程中均具有平滑的时空轨迹,避免了车辆时空轨迹出现剧烈波动;相对于纯分布式方法,提出的方法在给定的仿真条件下可使车辆燃油消耗最大降低14%;因此,在大规模路网中实施提出的分布式车辆群体协同决策方法可有效降低冲突区对车流连续性的影响,从而保证了车辆安全、平稳、环保地行驶。Abstract: To resolve the cooperative decision-making problem for vehicle swarms in large-scale road networks under the vehicle-infrastructure cooperative environment, a distributed cooperative decision-making method for vehicle swarms was proposed. On the basis of the in-depth analysis on the traffic control characteristics, the road network decomposition model was built to decompose the large-scale cooperative decision-making problem into several homogeneous small-scale sub-problems, each covering three different types of traffic areas: the upstream road segment, intersection, and downstream road segment. By the virtual vehicle mapping technique, the cooperative decision-making model of vehicle swarms was constructed to transform the two-dimensional cooperative decision-making problem of vehicle swarms at intersections into a one-dimensional problem. Similar to the cooperative decision-making method for vehicle swarms in the road segment areas, the interaction and conflict resolution between vehicles at intersections were accomplished by controlling the equivalent time headway of vehicles in the virtual vehicle platoon, and then the unified cooperative decision-making parameters were used to solve the cooperative decision-making problem of vehicle swarms in different areas of each sub-problem. Upon the unification of the cooperative decision-making parameters of vehicle swarms in different areas, the cooperative mechanism between the upstream and downstream areas was designed to ensure that the appropriate driving decisions could be made by the upstream vehicles under the full consideration of the downstream traffic states. Simulation results show that under different traffic demand settings, smooth spatiotemporal trajectories are presented by all vehicles while passing through the conflict areas after the proposed method is adopted, and the violent fluctuations in vehicle spatiotemporal trajectories are avoided. Compared with the purely distributed method, the fuel consumption of vehicles reduces by up to 14% with the proposed method under the given simulation conditions. Therefore, the proposed distributed cooperative decision-making method for vehicle swarms is effective in reducing the impact of conflict areas on the traffic flow continuity after being implemented in large-scale road networks, and thus ensuring the safe, smooth, and environmentally friendly driving of vehicles. 7 figs, 30 refs.
-

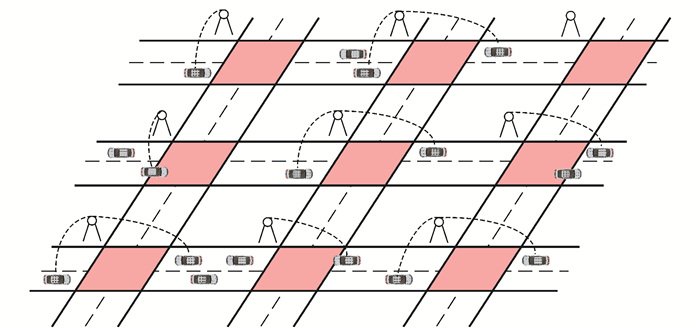
图 5 分布式车辆群体协同决策算法实现
Figure 5. Algorithm implementation of distributed cooperative decision-making for vehicle swarms

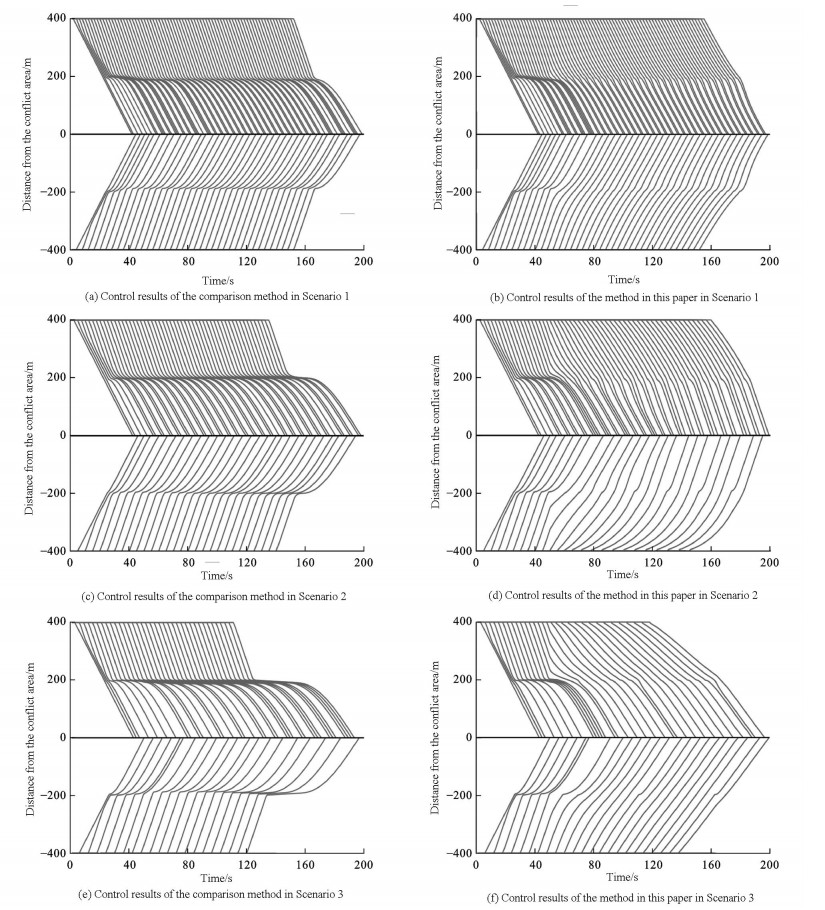
图 6 不同方法在不同场景下的车辆时空轨迹对比
Figure 6. Comparison of vehicle space-time trajectories of different methods in different scenarios

5. Implementation of distributed cooperative decision-making algorithm for vehicle swarms

6. Comparison of spatiotemporal trajectories of vehicles under different methods in different scenarios
-
[1] 李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1): 1-14. doi: 10.3969/j.issn.1674-8484.2017.01.001LI Ke-qiang, DAI Yi-fan, LI Sheng-bo, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. Journal of Automotive Safety and Energy, 2017, 8(1): 1-14. (in Chinese) doi: 10.3969/j.issn.1674-8484.2017.01.001 [2] 张毅, 姚丹亚, 李力, 等. 智能车路协同系统关键技术与应用[J]. 交通运输系统工程与信息, 2021, 21(5): 40-51. https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT202105006.htmZHANG Yi, YAO Dan-ya, LI Li, et al. Technologies and applications for intelligent vehicle-infrastructure cooperation systems[J]. Journal of Transportation Systems Engineering and Information Technology, 2021, 21(5): 40-51. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT202105006.htm [3] MAHBUB A M I, MALIKOPOULOS A A. Conditions to provable system-wide optimal coordination of connected and automated vehicles[J]. Automatica, 2021, 131: 109751. doi: 10.1016/j.automatica.2021.109751 [4] LI Li, WANG Fei-yue. Cooperative driving at blind crossings using intervehicle communication[J]. IEEE Transactions on Vehicular Technology, 2006, 55(6): 1712-1724. doi: 10.1109/TVT.2006.878730 [5] FENG Shuo, ZHANG Yi, LI S E, et al. String stability for vehicular platoon control: definitions and analysis methods[J]. Annual Reviews in Control, 2019, 47: 81-97. doi: 10.1016/j.arcontrol.2019.03.001 [6] GONG Si-yuan, SHEN Jing-lai, DU Li-li. Constrained optimization and distributed computation based car following control of a connected and autonomous vehicle platoon[J]. Transportation Research Part B: Methodological, 2016, 94: 314-334. doi: 10.1016/j.trb.2016.09.016 [7] CUI Lian, CHEN Zheng, WANG A, et al. Development of a robust cooperative adaptive cruise control with dynamic topology[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(5): 4279-4290. doi: 10.1109/TITS.2020.3043194 [8] WON M. L-platooning: a protocol for managing a long platoon with DSRC[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(6): 5777-5790. doi: 10.1109/TITS.2021.3057956 [9] DRESNER K, STONE P. Multiagent traffic management: a reservation-based intersection control mechanism[C]//IEEE. Proceedings of the Third International Joint Conference on Autonomous Agents and Multiagent Systems. New York: IEEE, 2004: 530-537. [10] DRESNER K, STONE P. A multiagent approach to autonomous intersection management[J]. Journal of Artificial Intelligence Research, 2008, 31: 591-656. doi: 10.1613/jair.2502 [11] LI Li, WEN Ding, YAO Dan-ya. A survey of traffic control with vehicular communications[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(1): 425-432. doi: 10.1109/TITS.2013.2277737 [12] MENG Yue, LI Li, WANG Fei-yue, et al. Analysis of cooperative driving strategies for nonsignalized intersections[J]. IEEE Transactions on Vehicular Technology, 2018, 67(4): 2900-2911. doi: 10.1109/TVT.2017.2780269 [13] XU Biao, LI S E, BIAN You-gang, et al. Distributed conflict-free cooperation for multiple connected vehicles at unsignalized intersections[J]. Transportation Research Part C: Emerging Technologies, 2018, 93: 322-334. doi: 10.1016/j.trc.2018.06.004 [14] PEI Hua-xin, FENG Shuo, ZHANG Yi, et al. A cooperative driving strategy for merging at on-ramps based on dynamic programming[J]. IEEE Transactions on Vehicular Technology, 2019, 68(12): 11646-11656. doi: 10.1109/TVT.2019.2947192 [15] PEI Hua-xin, ZHANG Yu-xiao, ZHANG Yi, et al. Optimal cooperative driving at signal-free intersections with polynomial- time complexity[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, DOI: 10.1109/TITS.2021.3118592. [16] ZHANG Y J, MALIKOPOULOS A A, CASSANDRAS C G. Optimal control and coordination of connected and automated vehicles at urban traffic intersections[C]//IEEE. 2016 American Control Conference (ACC). New York: IEEE, 2016: 6227-6232. [17] PEI Hua-xin, ZHANG Jia-wei, ZHANG Yi, et al. Fault- tolerant cooperative driving at signal-free intersections[J]. IEEE Transactions on Intelligent Vehicles, 2022, DOI: 10.1109/TIV.2022.3159088. [18] LI Li, WANG Fei-yue. Cooperative driving at adjacent blind intersections[C]//IEEE. 2005 IEEE International Conference on Systems, Man, and Cybernetics. New York: IEEE, 2005: 847-852. [19] ZHANG Jia-wei, PEI Hua-xin, BAN Xue-gang, et al. Analysis of cooperative driving strategies at road network level with macroscopic fundamental diagram[J]. Transportation Research Part C: Emerging Technologies, 2022, 135: 103503. doi: 10.1016/j.trc.2021.103503 [20] WANG Yun-peng, CAI Pin-long, LU Guang-quan. Cooperative autonomous traffic organization method for connected automated vehicles in multi-intersection road networks[J]. Transportation Research Part C: Emerging Technologies, 2020, 111: 458-476. doi: 10.1016/j.trc.2019.12.018 [21] MAHBUB A M I, MALIKOPOULOS A A, ZHAO Liu-hui. Decentralized optimal coordination of connected and automated vehicles for multiple traffic scenarios[J]. Automatica, 2020, 117: 108958. doi: 10.1016/j.automatica.2020.108958 [22] ASHTIANI F, FAYAZI S A, VAHIDI A. Multi-intersection traffic management for autonomous vehicles via distributed mixed integer linear programming[C]//IEEE. 2018 Annual American Control Conference. New York: IEEE, 2018: 6341-6346. [23] CHALAKI B, MALIKOPOULOS A A. An optimal coordination framework for connected and automated vehicles in two interconnected intersections[C]//IEEE. 2019 IEEE Conference on Control Technology and Applications. New York: IEEE, 2019: 888-893. [24] XU Qing, CAI Meng-chi, LI Ke-qiang, et al. Coordinated formation control for intelligent and connected vehicles in multiple traffic scenarios[J]. IET Intelligent Transport Systems, 2021, 15(1): 159-173. doi: 10.1049/itr2.12022 [25] PEI Hua-xin, ZHANG Yi, TAO Qing-hua, et al. Distributed cooperative driving in multi-intersection road networks[J]. IEEE Transactions on Vehicular Technology, 2021, 70(6): 5390-5403. doi: 10.1109/TVT.2021.3079272 [26] YU Hai-yang, JIANG Rui, HE Zheng-bing, et al. Automated vehicle-involved traffic flow studies: a survey of assumptions, models, speculations, and perspectives[J]. Transportation Research Part C: Emerging Technologies, 2021, 127: 103101. [27] UNO A, SAKAGUCHI T, TSUGAWA S. A merging control algorithm based on inter-vehicle communication[C]//IEEE. Proceedings of the IEEE/IEEJ/JSAI International Conference on Intelligent Transportation Systems. New York: IEEE, 1999: 783-787. [28] SAKAGUCHI T, UNO A, KATO S, et al. Cooperative driving of automated vehicles with inter-vehicle communications[C]// IEEE. Proceedings of the IEEE Intelligent Vehicles Symposium. New York: IEEE, 2000: 516-521. [29] DING Ji-shi-yu, LI Li, PENG H, et al. A rule-based cooperative merging strategy for connected and automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(8): 3436-3446. doi: 10.1109/TITS.2019.2928969 [30] KAMAL M A S, MUKAI M, MURATA J, et al. Ecological vehicle control on roads with up-down slopes[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(3): 783-794. -

 下载:
下载:





 点击查看大图
点击查看大图
计量
- 文章访问数: 1101
- HTML全文浏览量: 348
- PDF下载量: 138
- 被引次数: 0
