

Driverless vehicle positioning algorithm based on simultaneous positioning and mapping in low-visibility environment
-
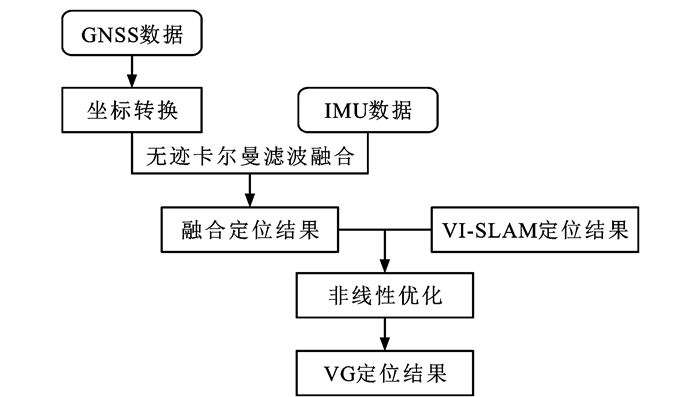
摘要: 为在大范围低可见度环境下实现无人驾驶汽车的高精度定位,基于VINS-Mono算法的系统框架,在系统的前端与后端分别增添了RFAST弱光图像增强模块与VG融合定位模块,提出了一种融合定位算法LVG_SLAM; RFAST弱光图像增强模块采用小波变换将原始输入图像的细节信息与亮度信息分离,对于包含原始图像噪声的细节信息通过统一阈值和均值滤波2种方式实现噪声抑制,并利用双边纹理滤波算法进行细节增强,在此基础上,根据多尺度Retinex算法增强图像的对比度,提高低可见度环境下角点提取的成功率,从而保证图像跟踪的稳定性,改善定位算法的鲁棒性; 基于无迹卡尔曼滤波算法,VG融合定位模块将GNSS定位信息与惯性导航测量信息进行松耦合,融合定位结果作为约束引入VI-SLAM后端,通过联合非线性优化的方式减少累积误差对算法定位精度的影响。计算结果表明:相较于VINS-Mono算法,改进的LVG_SLAM融合定位算法在EuRoC与Kitti公开数据集上表现更加出色,均方根误差分别降低了38.76%与58.39%,运动轨迹更贴近真实轨迹; 在实际夜晚道路场景下,LVG_SLAM算法将定位误差控制在一定范围内,顺利检测到闭环使得定位表现得到大幅改善,均方根误差、平均误差、最大误差、中位数误差分别降低了79.61%、82.50%、71.31%、83.77%,与VINS-Mono算法相比,在定位精度与鲁棒性方面具有明显的优势。Abstract: In order to achieve high-precision positioning for driverless vehicles in a large-scale and low-light environment, a fused positioning algorithm LVG_SLAM was proposed based on the system framework of the VINS-Mono algorithm. In LVG_SLAM, a RFAST low-light image enhancement module and a VG fusion positioning module were proposed and then added. The RFAST low-light image enhancement module applied a wavelet transform to separate the detailed information from the brightness information. In the RFAST module, the unified threshold and mean filter were applied to filter the detailed noisy information from the oringinal image while the bilateral texture filter algorithm was applied to enhance the detail information. After that, the multi-scale retinex algorithm was proposed to further enhance the contrast of the image to improve the success rate of corner extraction in a low-light environment, benefit from which, both the stability of image tracking and the robustness of the positioning algorithm were improved. Using an unscented Kalman filter (UKF) algorithm, the VG fusion positioning module loosely fused the positioning information from both the global navigation satellite system (GNSS) and the inertial navigation equipment. The fused positioning result was introduced as a constraint into the back end of the LVG_SLAM algorithm, benefit from which, the influence of cumulative error on the positioning accuracy of the algorithm was reduced by a joint nonlinear optimization. Analysis results show that compared with the VINS-Mono algorithm, the LVG_SLAM algorithm performs better on the EuRoC and Kitti public datasets, and the root mean square error reduces by 38.76% and 58.39%, respectively, so that the motion trajectory estimated by the LVG_SLAM algorithm is closer to the real trajectory. In an experiment of night road scene, the LVG_SLAM algorithm successfully constrains the positioning error into a certain range, and detects the closed loop, which greatly improves the positioning performance. The root mean square error, average error, maximum error, and median error reduce by 79.61%, 82.50%, 71.31%, and 83.77%, respectively. Compared with the VINS-Mono algorithm, the proposed LVG_SLAM algorithm has obvious advantages in both positioning accuracy and robustness. 4 tabs, 12 figs, 26 refs.
-

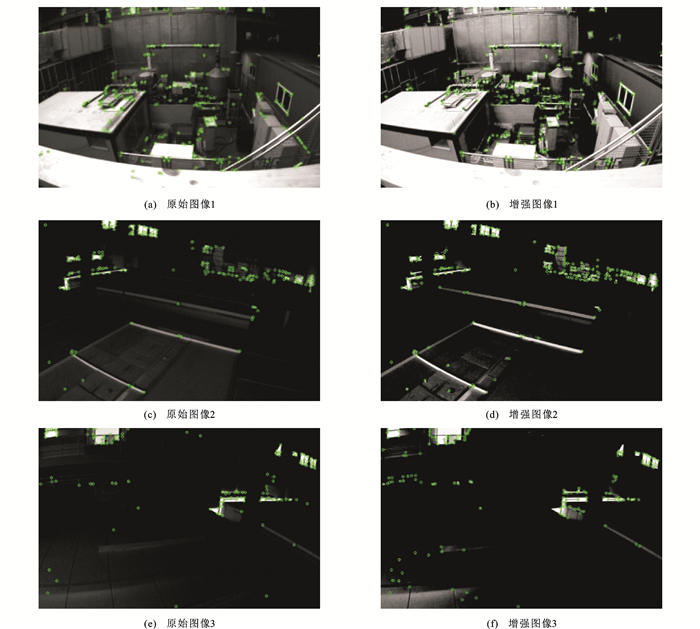
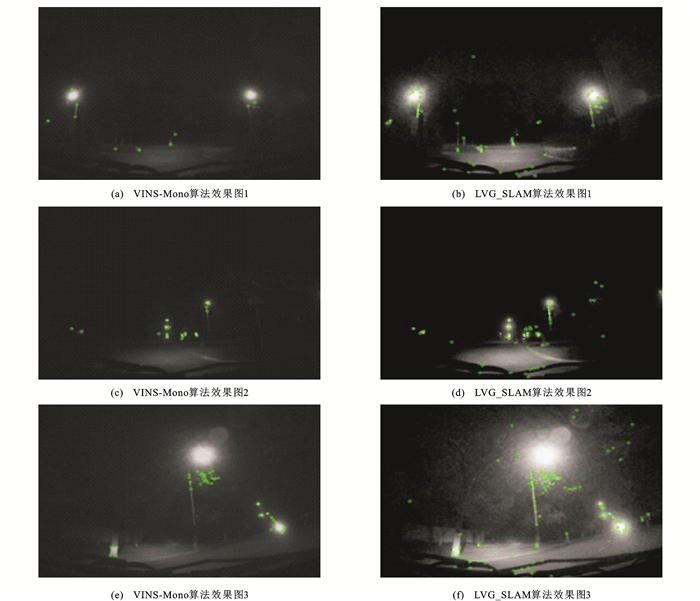
图 6 RFAST弱光图像增强算法试验结果
Figure 6. Experimental results of RFAST low-light image enhancement algorithm

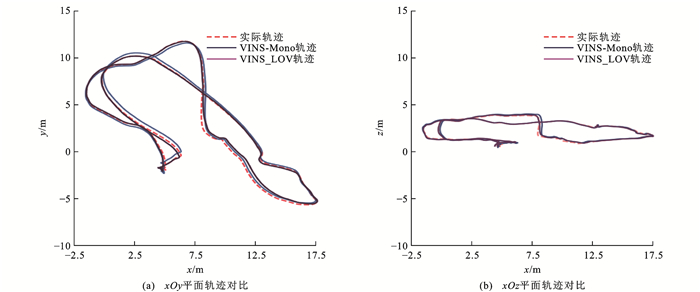
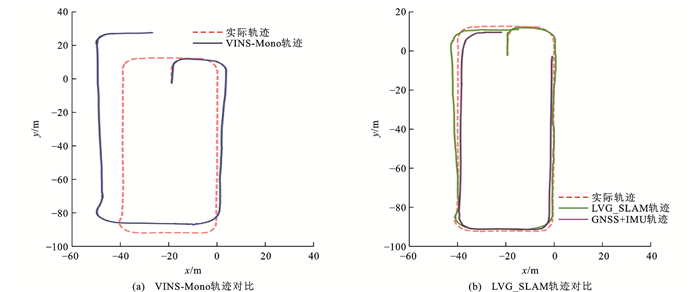
图 7 VINS-Mono与VINS_LOV运动轨迹对比
Figure 7. Comparison of motion trajectories between VINS-Mono and VINS_LOV

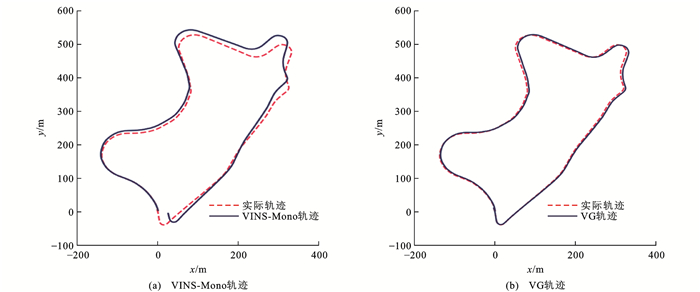
图 8 VINS-Mono与VG运动轨迹对比
Figure 8. Comparison of motion trajectories between VINS-Mono and VG
表 1 角点提取数量对比
Table 1. Comparison of corner extraction numbers
图像 角点提取个数 提升幅度/% 原始图像 增强图像 1 264 277 4.924 2 173 219 26.590 3 130 235 80.769  下载: 导出CSV
下载: 导出CSV
表 2 VINS-Mono与VINS_LOV误差对比
Table 2. Comparison of errors between VINS-Mono and VINS_LOV
评价指标 VINS_LOV VINS-Mono 均方根误差/m 0.199 629 0.325 981 平均误差/m 0.168 457 0.307 540 最大误差/m 0.455 183 0.472 395 最小误差/m 0.014 413 0.050 871 中位数误差/m 0.130 769 0.365 190
下载: 导出CSV
表 3 VINS-Mono与VG误差对比
Table 3. Comparison of errors between VINS-Mono and VG
评价指标 VG VINS-Mono 均方根误差/m 6.238 162 14.991 978 平均误差/m 5.578 558 13.337 583 最大误差/m 11.140 413 33.867 193 最小误差/m 0.126 134 5.506 336 中位数误差/m 5.704 954 10.387 250
下载: 导出CSV
表 4 夜晚道路试验运动轨迹误差对比
Table 4. Comparison of motion trajectory errors in night road experiment
评价指标 LVG_SLAM VINS-Mono 均方根误差/m 2.692 074 13.204 907 平均误差/m 1.951 224 11.147 574 最大误差/m 7.870 044 27.429 693 最小误差/m 0.114 326 0.092 444 中位数误差/m 1.489 543 9.178 928
下载: 导出CSV
-
[1] BRESSON G, ALSAYED Z, YU Li, et al. Simultaneous localization and mapping: a survey of current trends in autonomous driving[J]. IEEE Transactions on Intelligent Vehicles, 2017, 2(3): 194-220. doi: 10.1109/TIV.2017.2749181 [2] DOMÍNGUEZ-CONTI J, YIN Jian-feng, ALAMI Y, et al. Visual-inertial SLAM initialization: a general linear formulation and a gravity-observing non-linear optimization[C]//IEEE. 2018 IEEE International Symposium on Mixed and Augmented Reality (ISMAR). New York: IEEE, 2018: 37-45. [3] HUANG Jia-wei, LIU Shi-guang. Robust simultaneous localization and mapping in low-light environment[J]. Computer Animation and Virtual Worlds, 2019, 30(3/4): 155-161. [4] WANG Jun, WANG Rui, WU An-wen. Improved gamma correction for visual SLAM in low-light scenes[C]//IEEE. 2019 IEEE 3rd Advanced Information Management, Communicates, Electronic and Automation Control Conference. New York: IEEE, 2019: 1159-1163. [5] LORE K G, AKINTAYO A, SARKAR S. LLNet: a deep autoencoder approach to natural low-light image enhancement[J]. Pattern Recognition, 2017, 61: 650-662. doi: 10.1016/j.patcog.2016.06.008 [6] WEI Chen, WANG Wen-jing, YANG Wen-han, et al. Deep retinex decomposition for low-light enhancement[J]. ArXiv, 2018, DOI: arXiv:1808.04560. [7] DABOV K, FOI A, KATKOVNIK V, et al. Image denoising by sparse 3-D transform-domain collaborative filtering[J]. IEEE Transactions on Image Processing, 2007, 16(8): 2080-2095. doi: 10.1109/TIP.2007.901238 [8] ZHANG Kai, ZUO Wang-meng, CHEN Yun-jin, et al. Beyond a Gaussian denoiser: residual learning of deep CNN for image denoising[J]. IEEE transactions on Image Processing, 2017, 26(7): 3142-3155. doi: 10.1109/TIP.2017.2662206 [9] QIN Tong, LI Pei-liang, SHEN Shao-jie. VINS-mono: a robust and versatile monocular visual-inertial state estimator[J]. IEEE Transactions on Robotics, 2018, 34(4): 1004-1020. doi: 10.1109/TRO.2018.2853729 [10] ROESLER C, LARSON K M. Software tools for GNSS interferometric reflectometry (GNSS-IR)[J]. GPS Solutions, 2018, 22(3): 987-995. [11] 章为川, 孔祥楠, 宋文. 图像的角点检测研究综述[J]. 电子学报, 2015, 43(11): 2315-2321. doi: 10.3969/j.issn.0372-2112.2015.11.026ZHANG Wei-chuan, KONG Xiang-nan, SONG Wen. Review of image corner detection algorithms[J]. Acta Electronica Sinica, 2015, 43(11): 2315-2321. (in Chinese) doi: 10.3969/j.issn.0372-2112.2015.11.026 [12] LUCAS B D, KANADE T. An iterative image registration technique with an application to stereo vision[C]//IJCAI. Proceedings of the 7th International Joint Conference on Artificial Intelligence. Vancouver: IJCAI, 1981: 674-679. [13] AGARWAL S, SNAVELY N, SEITZ S M, et al. Bundle adjustment in the large[C]//Springer. 11th European Conference on Computer Vision. Berlin: Springer, 2010: 29-42. [14] 唐崇武. 图像统计建模与噪声分析关键技术的研究[D]. 上海: 上海交通大学, 2015.TANG Chong-wu. Research onkey techniques of image statistical modeling and noise analysis[D]. Shanghai: Shanghai Jiao Tong University, 2015. (in Chinese) [15] 郝志成, 吴川, 杨航, 等. 基于双边纹理滤波的图像细节增强方法[J]. 中国光学, 2016, 9(4): 423-431. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGA201604005.htmHAO Zhi-cheng, WU Chuan, YANG Hang, et al. Image detail enhancement method based on multi-scale bilateral texture filter[J]. Chinese Optics, 2016, 9(4): 423-431. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGA201604005.htm [16] LIN Hao-ming, SHI Zhen-wei. Multi-scale retinex improvement for nighttime image enhancement[J]. Optik, 2014, 125(24): 7143-7148. doi: 10.1016/j.ijleo.2014.07.118 [17] HAN Nian-long, HU Jin-xing, ZHANG Wei. Multi-spectral and SAR images fusion via Mallat and À trous wavelet transform[C]//IEEE. 2010 18th International Conference on Geoinformatics. New York : IEEE, 2010: 1-4. [18] 田流芳. 基于中值滤波和小波变换的图像去噪算法研究[D]. 保定: 河北大学, 2014.TIAN Liu-fang. Research onimage denoising algorithm based on median filtering and wavelet transform[D]. Baoding: Hebei University, 2014. (in Chinese) [19] FEBIN I P, JIDESH P, BINI A A. A retinex-based variational model for enhancement and restoration of low-contrast remote-sensed images corrupted by shot noise[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2020, 13: 941-949. doi: 10.1109/JSTARS.2020.2975044 [20] COSTA D S, MELLO C A B. Enhancement ofweakly illuminated images using CNN and retinex theory[C]//IEEE. 2020 IEEE International Conference on Systems, Man, and Cybernetics. New York: IEEE, 2020: 2559-2564. [21] MA Shi-ping, MA Hong-qiang, XU Yue-lei, et al. A low-light sensor image enhancement algorithm based on HSI color model[J]. Sensors, 2018, 18(10): 524-536. [22] MUSTAFA W A, YAZID H, YAACOB S B. Illumination normalization of non-uniform images based on double mean filtering[C]//IEEE. 2014 IEEE international conference on control system, computing and engineering. New York: IEEE, 2014: 366-371. [23] 李晓飞. 基于小波变换的图像去噪方法研究[D]. 南京: 南京邮电大学, 2016.LI Xiao-fei. Research onimage denoising method based on wavelet transform[D]. Nanjing: Nanjing University of Posts and Telecommunications, 2016. (in Chinese) [24] FERNANDES L C, DE MENEZES L R A X, LOUREIRO A J F. Using the unscented transform to reduce the number of measurements in drive tests[J]. SN Applied Sciences, 2021, 3(2): 145-152. doi: 10.1007/s42452-020-04130-x [25] BURRI M, NIKOLIC J, GOHL P, et al. The EuRoC micro aerial vehicle datasets[J]. The International Journal of Robotics Research, 2016, 35(10): 1157-1163. doi: 10.1177/0278364915620033 [26] GEIGER A, LENZ P, STILLER C, et al. Vision meets robotics: the KITTI dataset[J]. The International Journal of Robotics Research, 2013, 32(11): 1231-1237. doi: 10.1177/0278364913491297 -





 点击查看大图
点击查看大图

计量
- 文章访问数: 369
- HTML全文浏览量: 115
- PDF下载量: 64
- 被引次数: 0
