

Scenario factor analysis and test case generation for vehicle-infrastructure cooperative mixed traffic
-
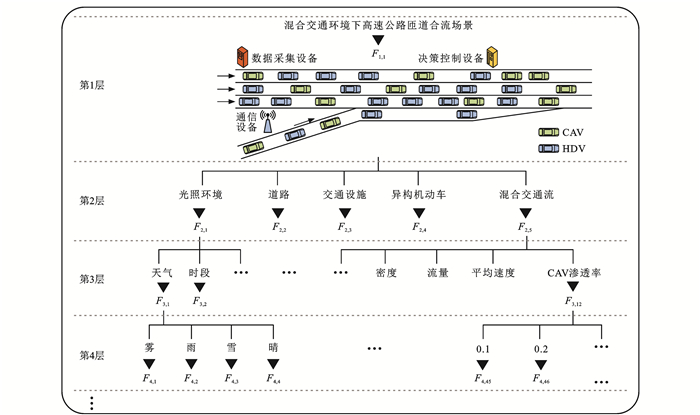
摘要: 面向混合交通环境下多车效率类和单车安全类场景测试需求,研究了基于混合交通场景要素解析的车路协同测试案例生成方法; 为提高测试案例的多样性和覆盖度,分析了混合交通特征要素相互作用机理,构建了混合交通场景要素层次模型,提出了场景要素重要度的一致性描述指标,并在此基础上建立了测试案例复杂度模型; 针对多车效率类场景仿真测试,提出了复杂度激励的组合测试案例生成方法,设计了场景要素强耦合组合策略; 针对单车安全类场景仿真测试,提出了基于复杂度聚类的蒙特卡洛测试案例生成方法,设计了风险场景特征参数抽样机制; 选取车路协同混合交通典型场景开展仿真试验,验证了提出的测试案例生成方法的有效性。研究结果表明,对于多车效率类混合交通高速公路匝道合流场景测试,提出的方法比传统成对测试方法的场景最大复杂度提高了11.93%,高复杂度场景占比提高了60.02%,测试案例覆盖度提高了12.08%;对于单车安全类车路协同换道预警场景测试,提出的方法比传统蒙特卡洛测试方法的危险场景数提高了195%,且其参数估计误差降低了5.95%,高风险场景数提高了119%,且其参数估计误差降低了4.78%。可见,提出的方法能够提高测试案例的多样性和覆盖度,有助于开展复杂环境和风险条件下车路协同系统功能测试,能够有效满足多车效率类和单车安全类场景测试需求。Abstract: Considering the test requirements of multi-vehicle efficiency and single-vehicle safety scenarios in a mixed traffic environment, a test case generation method for the vehicle-infrastructure cooperation was developed based on the scenario factor analysis of mixed traffic. For higher diversity and coverage of test cases, the interaction mechanism of mixed traffic characteristic factors was analyzed, the hierarchical model of mixed traffic scenario factors was constructed, and the consistency description index of the importance of scenario factors was proposed. On this basis, a complexity model of test cases was built. For the simulation and test of multi-vehicle efficiency scenarios, a complexity-inspired generation combination test case method was proposed, and a combination strategy with strong coupling of scenario factors was designed. For the simulation and test of single-vehicle safety scenarios, a Monte Carlo test case generation method based on the complexity clustering was put forward, and a sampling mechanism of characteristic parameters of risk scenarios was designed. Typical scenarios of vehicle-infrastructure cooperative mixed traffic were selected for simulation experiments, to verify the effectiveness of the proposed test case generation method. Research results show that for the ramp-merging scenario test of expressways in mixed traffic of multi-vehicle efficiency, compared with the traditional pairwise test method, the proposed method improves the maximum complexity of scenarios, proportion of high-complexity scenarios, and coverage of test cases by 11.93%, 60.02%, and 12.08%, respectively. For the vehicle-infrastructure cooperative lane-changing warning scenario test of single-vehicle safety, compared with the traditional Monte Carlo test method, the proposed method raises the number of dangerous scenarios by 195%, with reducing the parameter estimation error by 5.95%, and increases the number of high-risk scenarios by 119%, with reducing the parameter estimation error by 4.78%. Therefore, the proposed method can improve the diversity and coverage of test cases, contribute to carry out the functional test of the vehicle-infrastructure cooperative system under complex environments and risk conditions, and can effectively meet the test requirements of multi-vehicle efficiency and single-vehicle safety scenarios. 6 tabs, 11 figs, 34 refs.
-

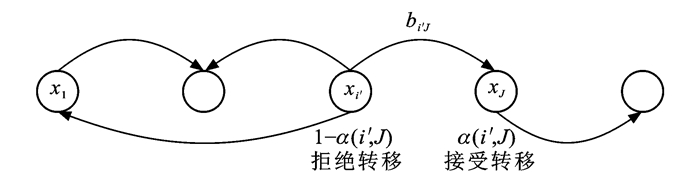
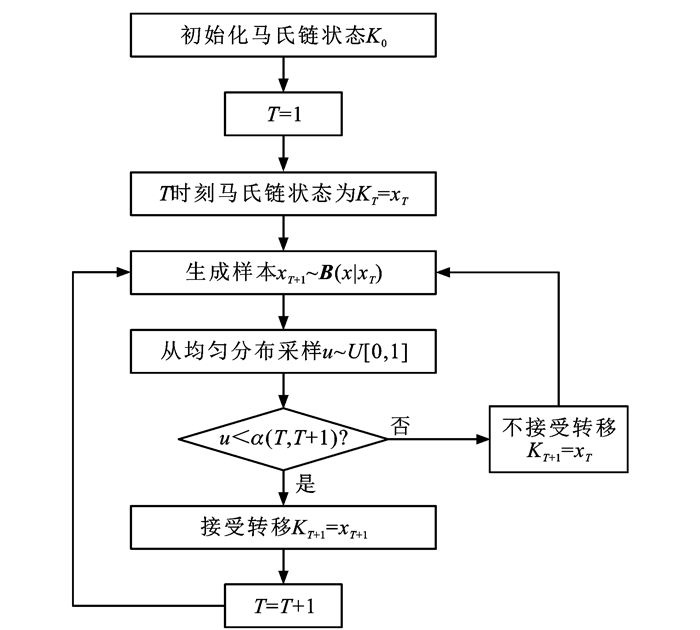
图 3 马氏链转移和接受概率示意
Figure 3. Illustration of Markov chain transfer and acceptance probabilities

图 6 PICT改进算法与ET生成测试案例数对比
Figure 6. Comparison of numbers of test cases generated by improved PICT algorithm and ET

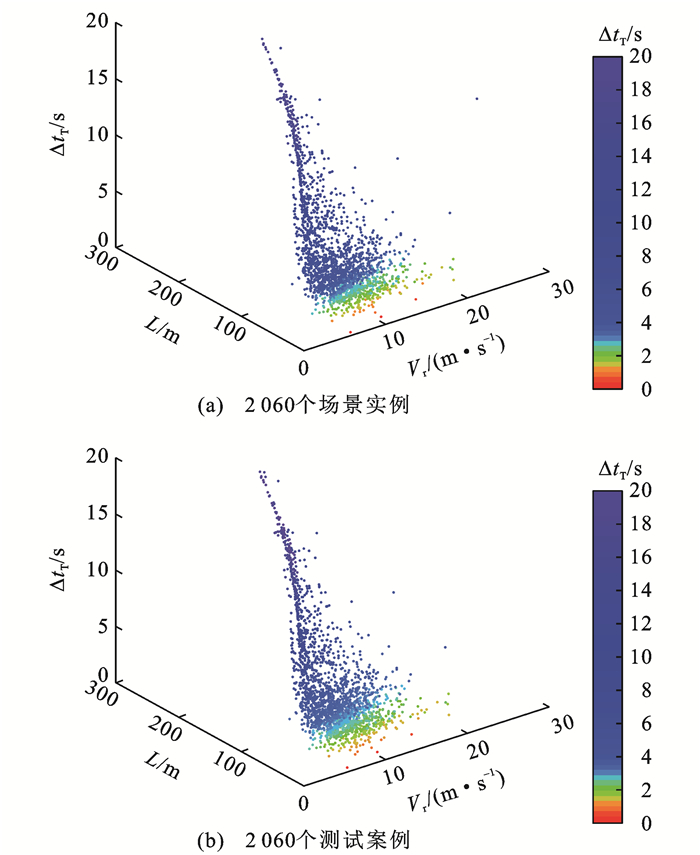
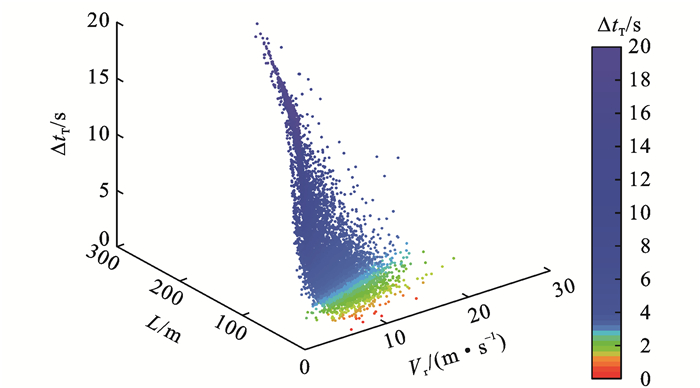
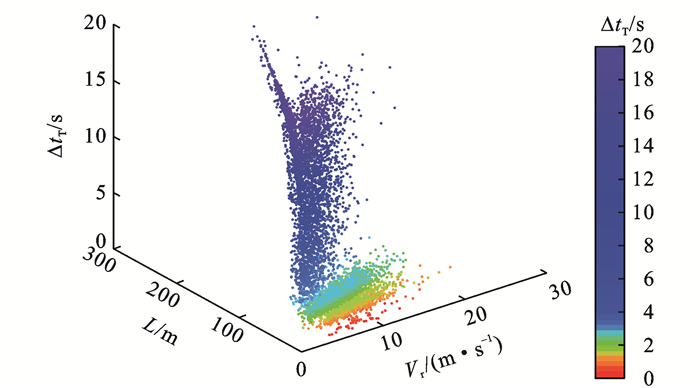
图 9 场景实例与测试案例风险程度对比
Figure 9. Comparison of risk degrees between scenario instances and test cases
表 1 不同测试案例生成方法的适用性对比
Table 1. Applicability comparison of different test case generation methods
适用条件 复杂度激励的组合测试案例生成方法 基于复杂度聚类的蒙特卡洛测试案例生成方法 需求导向 效率类 安全类 车辆数 多车 单车 场景规模 大规模 小规模  下载: 导出CSV
下载: 导出CSV
表 2 匝道合流场景要素示例
Table 2. Examples of ramp merging scenario factors
场景要素 异属元要素 耦合指数 光照环境 天气 晴 0.000 4 时段 早晨 0.000 4 道路 主路 车道数 3 0.014 9 限速/(m·s-1) 22 0.012 6 匝道 车道数 1 0.011 3 限速/(m·s-1) 11 0.033 7 加速车道 车道数 1 0.008 2 限速/(m·s-1) 22 0.003 5 交通设施 路侧通信设备 有 0.014 0 路侧控制设备 无 0.059 5 异构机动车 HDV 加速度/(m·s-2) 2 0.008 6 减速度/(m·s-2) 2 0.011 3 CAV 加速度/(m·s-2) 2 0.010 0 减速度/(m·s-2) 2 0.012 1 混合交通流 流量 主路上游/(veh·h-1) 6 000 0.047 4 匝道上游/(veh·h-1) 1 000 0.033 8 CAV渗透率 0.4 0.080 5
下载: 导出CSV
表 3 测试案例复杂度分布对比
Table 3. Comparison of test case complexity distributions
统计量 PICT算法 AETG算法 PICT改进算法 最小值 0.096 3 0.128 0 0.107 2 下四分位数值 0.146 7 0.209 5 0.323 8 中值 0.233 9 0.244 3 0.440 5 上四分位数值 0.356 8 0.315 7 0.503 4 最大值 0.477 1 0.431 4 0.534 0
下载: 导出CSV
表 4 区间划分统计结果
Table 4. Interval partitioning statistical results
对象类型 区间数 单个区间内场景数 合计 [1, 5) [5, 10) [10, 20) [20, +∞) 场景实例 62 35 31 36 164 测试案例 104 41 30 33 208
下载: 导出CSV
表 5 不同类型场景测试案例数及占比
Table 5. Numbers and proportions of test cases for different types of scenarios
场景类型 方法类型 ΔtT/s 数量 占总数比例/% 危险场景 MC (0, 0.9] 20 0.20 IS 59 0.59 高风险场景 MC (0.9, 1.9] 443 4.43 IS 969 9.69 中风险场景 MC (1.9, 2.9] 1 402 13.02 IS 2 627 26.27 低风险场景 MC (2.9, 20] 4 475 44.75 IS 2 951 29.51
下载: 导出CSV
表 6 高危风险场景的估计概率和相对误差
Table 6. Estimated probabilities and relative errors for high-risk and hazardous scenarios
场景类型 方法类型 估计概率 相对误差/% 危险场景 MC 0.001 9 14.68 IS 0.001 8 8.73 高风险场景 MC 0.042 8 8.74 IS 0.043 1 3.96
下载: 导出CSV
-
[1] MENZEL T, BAGSCHIK G, MAURER M. Scenarios for development, test and validation of automated vehicles[C]//IEEE. 2018 IEEE Intelligent Vehicles Symposium (Ⅳ). New York: IEEE, 2018: 1821-1827. [2] WEBER H, BOCK J, KLIMKE J, et al. A framework for definition of logical scenarios for safety assurance of automated driving[J]. Traffic Injury Prevention, 2019, 20(S1): 65-70. [3] ULBRICH S, MENZEL T, RESCHKA A, et al. Defining and substantiating the terms scene, situation, and scenario for automated driving[C]//IEEE. 2015 IEEE 18th International Conference on Intelligent Transportation Systems (ITSC). New York: IEEE, 2018: 982-988. [4] 徐向阳, 胡文浩, 董红磊, 等. 自动驾驶汽车测试场景构建关键技术综述[J]. 汽车工程, 2021, 43(4): 610-619. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC202104021.htmXU Xiang-yang, HU Wen-hao, DONG Hong-lei, et al. Review of key technologies for autonomous vehicle test scenario construction[J]. Automotive Engineering, 2021, 43(4): 610-619. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC202104021.htm [5] 朱冰, 张培兴, 赵健, 等. 基于场景的自动驾驶汽车虚拟测试研究进展[J]. 中国公路学报, 2019, 32(6): 1-19. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906002.htmZHU Bing, ZHANG Pei-xing, ZHAO Jian, et al. Review of scenario-based virtual validation methods for automated vehicles[J]. China Journal of Highway and Transport, 2019, 32(6): 1-19. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906002.htm [6] ELROFAI H, PAARDEKOOPER J, GELDER E, et al. Scenario-based safety validation of connected and automated driving[R]. Helmond: TNO, 2018. [7] HINA M D, SOUKANE A, RAMDANE-CHERIF A. Cognition of driving context in a connected and semi-autonomous vehicle: a perspective[J]. Ada User Journal, 2017, 38(4): 222-226. [8] ROCKLAGE E, KRAFT H, KARATAS A, et al. Automated scenario generation for regression testing of autonomous vehicles[C]//IEEE. 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC). New York: IEEE, 2017: 476-483. [9] 白雪松, 邓伟文, 任秉韬, 等. 一种自动驾驶仿真场景要素的提取方法[J]. 汽车工程, 2021, 43(7): 1030-1036, 1065. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC202107011.htmBAI Xue-song, DENG Wei-wen, REN Bing-tao, et al. An extraction method of scenario elements for autonomous driving simulation[J]. Automotive Engineering, 2021, 43(7): 1030-1036, 1065. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC202107011.htm [10] XIA Qin, DUAN Jian-li, GAO Feng, et al. Test scenario design for intelligent driving system ensuring coverage and effectiveness[J]. International Journal of Automotive Technology, 2018, 19(4): 751-758. doi: 10.1007/s12239-018-0072-6 [11] XIA Qin, DUAN Jian-li, GAO Feng, et al. Automatic generation method of test scenario for ADAS based on complexity[J]. SAE Technical Paper Series, 2017-01-1992. [12] GAO Feng, DUAN Jian-li, HAN Zai-dao, et al. Automatic virtual test technology for intelligent driving systems considering both coverage and efficiency[J]. IEEE Transactions on Vehicular Technology, 2020, 69(12): 14365-14376. doi: 10.1109/TVT.2020.3033565 [13] GAO Feng, DUAN Jian-li, HE Ying-dong, et al. A test scenario automatic generation strategy for intelligent driving systems[J]. Mathematical Problems in Engineering, 2019, 2019: 3737486. [14] ROESENER C, FAHRENKROG F, UHLIG A, et al. A scenario-based assessment approach for automated driving by using time series classification of human-driving behaviour[C]//IEEE. 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC). New York: IEEE, 2016: 1360-1365. [15] HALLERBACH S, XIA Yi-qun, EBERLE U, et al. Simulation-based identification of critical scenarios for cooperative and automated vehicles[J]. SAE International Journal of Connected and Automated Vehicles, 2018, 1(2): 93-106. doi: 10.4271/2018-01-1066 [16] LANGNER J, BACH J, RIES L, et al. Estimating the uniqueness of test scenarios derived from recorded real-world-driving-data using autoencoders[C]//IEEE. 2018 IEEE Intelligent Vehicles Symposium (IV). New York: IEEE, 2018: 1860-1866. [17] FELLNER A, KRENN W, SCHLICK R, et al. Model-based, mutation-driven test-case generation via heuristic-guided branching search[J]. ACM Transactions on Embedded Computing Systems, 2019, 18(1): 1-28. [18] 舒红, 袁康, 修海林, 等. 自动驾驶汽车基础测试场景构建研究[J]. 中国公路学报, 2019, 32(11): 245-254. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201911026.htmSHU Hong, YUAN Kang, XIU Hai-lin, et al. Construction of basic test scenarios of automated vehicles[J]. China Journal of Highway and Transport, 2019, 32(11): 245-254. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201911026.htm [19] DUAN Jian-li, GAO Feng, HE Ying-dong. Test scenario generation and optimization technology for intelligent driving systems[J]. IEEE Intelligent Transportation Systems Magazine, 2022, 14(1): 115-127. doi: 10.1109/MITS.2019.2926269 [20] 上官伟, 张凤娇, 蔡伯根, 等. 基于萤火虫-免疫算法的CVIS测试序列优化方法[J]. 中国公路学报, 2017, 30(11): 129-137, 155. doi: 10.3969/j.issn.1001-7372.2017.11.014SHANGGUAN Wei, ZHANG Feng-jiao, CAI Bai-gen, et al. IFA-based test sequence optimization method for CVIS[J]. China Journal of Highway and Transport, 2017, 30(11): 129-137, 155. (in Chinese) doi: 10.3969/j.issn.1001-7372.2017.11.014 [21] MULLINS G E, STANKIEWICZ P G, HAWTHORNE R C, et al. Adaptive generation of challenging scenarios for testing and evaluation of autonomous vehicles[J]. Journal of Systems and Software, 2018, 137: 197-215. doi: 10.1016/j.jss.2017.10.031 [22] KLISCHAT M, LIU E I, HOLTKE F, et al. Scenario factory: creating safety-critical traffic scenarios for automated vehicles[C]//IEEE. 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC). New York: IEEE, 2020: 1-7. [23] KLISCHAT M, ALTHOFF M. Generating critical test scenarios for automated vehicles with evolutionary algorithms[C]//IEEE. 2019 IEEE Intelligent Vehicles Symposium (IV). New York: IEEE, 2019: 2352-2358. [24] FENG Shuo, FENG Yi-heng, SUN Hao-wei, et al. Testing scenario library generation for connected and automated vehicles: n adaptive framework[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(2): 1213-1222. doi: 10.1109/TITS.2020.3023668 [25] HUANG Li, XIA Qin, XIE Fei, et al. Study on the test scenarios of level 2 automated vehicles[C]//IEEE. 2018 IEEE Intelligent Vehicles Symposium (Ⅳ). New York: IEEE, 2018: 49-54. [26] 周文帅, 朱宇, 赵祥模, 等. 面向高速公路车辆切入场景的自动驾驶测试用例生成方法[J]. 汽车技术, 2021(1): 11-18. https://www.cnki.com.cn/Article/CJFDTOTAL-QCJS202101003.htmZHOU Wen-shuai, ZHU Yu, ZHAO Xiang-mo, et al. Vehicle cut-in test case generation methods for testing of autonomous driving on highway[J]. Automobile Technology, 2021(1): 11-18. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCJS202101003.htm [27] ZHAO Ding, HUANG Xia-nan, PENG H, et al. Accelerated evaluation of automated vehicles in car-following maneuvers[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(3): 733-744. doi: 10.1109/TITS.2017.2701846 [28] ZHANG Song-an, PENG H, ZHAO Ding, et al. Accelerated evaluation of autonomous vehicles in the lane change scenario based on subset simulation technique[C]//IEEE. 2018 21st International Conference on Intelligent Transportation Systems (ITSC). New York: IEEE, 2018: 3935-3940. [29] ARIEF M, HUANG Zhi-yuan, KUMAR G K S, et al. Deep probabilistic accelerated evaluation: a robust certifiable rare-event simulation methodology for black-box safety-critical systems[C]//BANERJEE A, FUKUMIZU K. 24th International Conference on Artificial Intelligence and Statistics (AISTATS). Brookline: Microtome Publishing, 2021: 595-603. [30] 邓伟文, 李江坤, 任秉韬, 等. 面向自动驾驶的仿真场景自动生成方法综述[J]. 中国公路学报, 2022, 35(1): 316-333. doi: 10.3969/j.issn.1001-7372.2022.01.027DENG Wei-wen, LI Jiang-kun, REN Bing-tao, et al. A survey on automatic simulation scenario generation methods for autonomous driving[J]. China Journal of Highway and Transport, 2022, 35(1): 316-333. (in Chinese) doi: 10.3969/j.issn.1001-7372.2022.01.027 [31] 王润民, 朱宇, 赵祥模, 等. 自动驾驶测试场景研究进展[J]. 交通运输工程学报, 2021, 21(2): 21-37. https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202102006.htmWANG Run-min, ZHU Yu, ZHAO Xiang-mo, et al. Research progress on test scenario of autonomous driving[J]. Journal of Traffic and Transportation Engineering, 2021, 21(2): 21-37. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202102006.htm [32] KIM B, MASUDA T, SHIRAISHI S. Test specification and generation for connected and autonomous vehicle in virtual environments[J]. ACM Transactions on Cyber-Physical Systems, 2020, 4(1): 1-26. [33] KESTING A, TREIBER M, HELBING D. Enhanced intelligent driver model to access the impact of driving strategies on traffic capacity[J]. Philosophical Transactions Series A, Mathematical, Physical, and Engineering Sciences, 2010, 368(1928): 4585-4605. [34] MILANÉS V, SHLADOVER S. Modelling cooperative and autonomous adaptive cruise control dynamic responses using experimental data[J]. Transportation Research Part C: Emerging Technologies, 2014, 48: 285-300. -



 点击查看大图
点击查看大图

计量
- 文章访问数: 1269
- HTML全文浏览量: 470
- PDF下载量: 165
- 被引次数: 0
