

Communication delay compensation method of CACC platooning system based on model predictive control
-
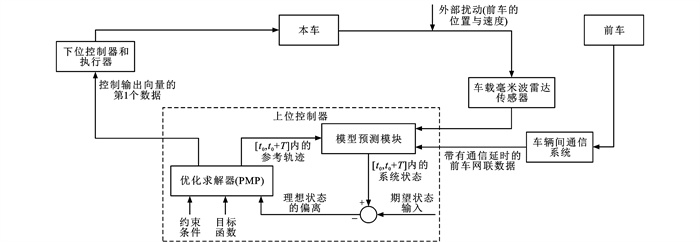
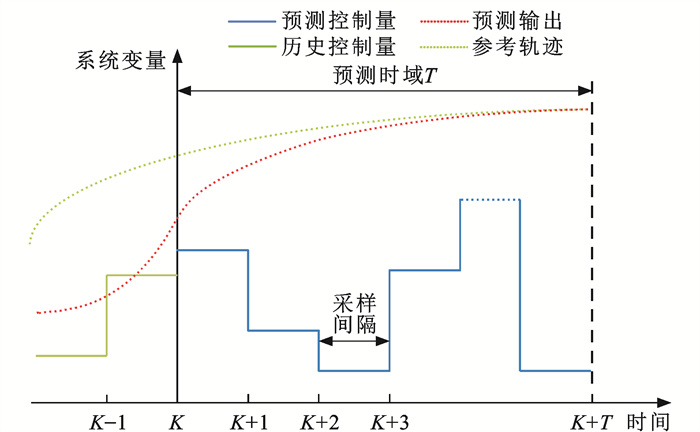
摘要: 为确保通信延时条件下协同式自适应巡航控制(CACC)系统的弦稳定性,利用模型预测控制(MPC)和长短期记忆(LSTM)预测方法,研究CACC系统中车辆协同控制下的通信延时补偿方法;基于车辆队列四元素架构理论,构建了包括车辆动力学模型、间距策略、网络拓扑和MPC纵向控制器的系统模型,并综合考虑2范数和无穷范数弦稳定性条件,提出了CACC车辆队列混合范数弦稳定性量化指标,最终形成协同式车辆队列建模与评价体系;设计了一种利用前车加速度轨迹(PVAT)作为开环优化参考轨迹的MPC方法,即MPC-PVAT,通过综合考虑队列的跟驰、安全、通行效率和燃油消耗等性能指标,使目标函数趋于最小代价,从而得到当前时刻的最优控制量,并利用庞特里亚金最大值原理对所设计的优化问题进行快速求解;在MPC-PVAT基础上,提出一种基于长短期记忆(LSTM)网络的通信延时补偿方法,即MPC-LSTM,将跟驰车辆的传感器信息输入LSTM网络来预测其前车的运动状态,从而缓解短暂通信延时对车辆队列稳定性的影响。仿真测试结果表明:MPC-LSTM可容忍的通信延时上界大于1.5 s,比MPC-PVAT提升了0.8 s,比线性控制器提升了1.1 s;在基于实车数据测试中,当通信延时增加到1.2 s时,MPC-LSTM的弦稳定性指标相比MPC-PVAT提升了20.33%,与线性控制器相比稳定性提升了39.35%。可见,在通信延时较大的情况下,MPC-LSTM对通信延时具有很好的容忍性,从而有效地保证了CACC车辆队列的弦稳定性。Abstract: The model predictive control (MPC) and long short term memory (LSTM) methods were used to mitigate the impact of communication delay on the cooperative adaptive cruise control (CACC) platooning system. A communication delay compensation method was proposed to guarantee the string stability of the CACC platooning system. A system framework was designed including vehicle dynamics model, spacing strategy, information topology and MPC controller. Moreover, a quantitative indicator of the string stability was proposed by considering 2 norm and infinite norm conditions. Consequently, a modeling and evaluation methodology of the CACC platooning system was constructed. A MPC method was proposed to take the preceding vehicle acceleration trajectory (PVAT) of the preceding vehicle as reference trajectory, namely MPC-PVAT. The following, traffic safety, traffic efficiency and fuel consumption were considered comprehensively. An objective function was minimized to construct the optimal control. The Pontryagin maximum principle was used to efficiently solve the optimization problem. Furthermore, a long short term memory network was used on the MPC-PVAT. The PVAT was replaced by the predicted result in the MPC of the preceding vehicle. The MPC-PVAT was upgraded to the MPC-LSTM. Therefore, the effect of communication delay was further mitigated. Simulation results show that the upper bound of communication delay is more than 1.5 s by using the MPC-LSTM, and improves by 0.8 and 1.1 s compared with the MPC-PVAT and linear controller, respectively. For the field test results, when the communication delay is 1.2 s, the quantitative indicator of the string stability of the MPC-LSTM improves by 20.33% and 39.35% compared with the MPC-PVAT and linear controller, respectively. Consequently, the MPC-LSTM can guarantee the string stability of a CACC platooning system while the effect of communication delay is well tolerated.
-

图 6 MPC-LSTM前车加速度轨迹预测
Figure 6. Front vehicle acceleration trajectory prediction of MPC-LSTM

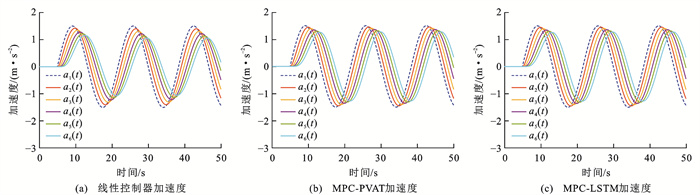
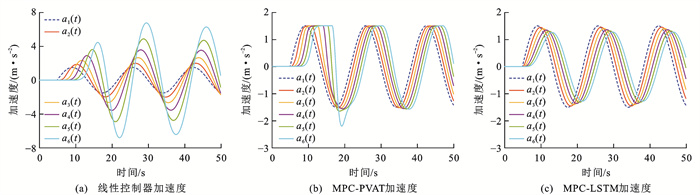
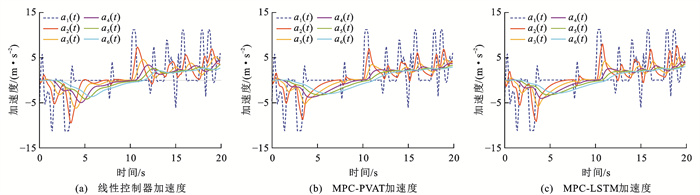
图 7 无延时条件下基于正弦运动工况的加速度测试结果
Figure 7. Acceleration test results without delay under sinusoidal scenario

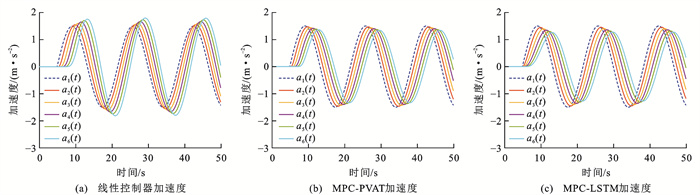
图 8 0.4 s延时条件下基于正弦运动工况的加速度测试结果
Figure 8. Acceleration test results with 0.4 s delay under sinusoidal scenario

图 9 0.7 s延时条件下基于正弦运动工况的加速度测试结果
Figure 9. Acceleration test results with 0.7 s delay under sinusoidal scenario

图 10 1.5 s延时条件下基于正弦运动工况的加速度测试结果
Figure 10. Acceleration test results with 1.5 s delay under sinusoidal scenario

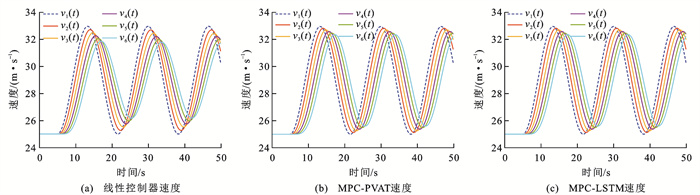
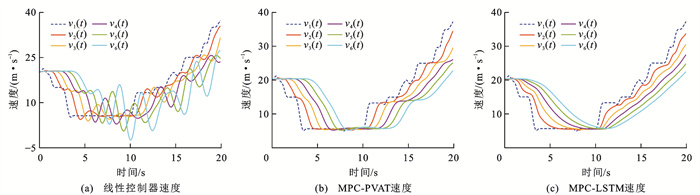
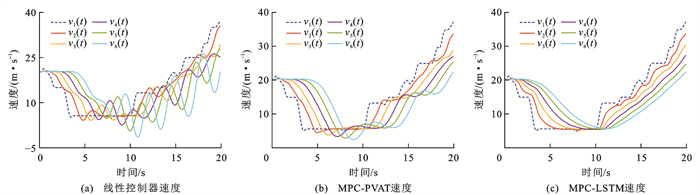
图 11 无延时条件下基于正弦运动工况的速度测试结果
Figure 11. Speed test results without delay under sinusoidal scenario

图 12 0.4 s延时条件下基于正弦运动工况的速度测试结果
Figure 12. Speed test results with 0.4 s delay under sinusoidal scenario

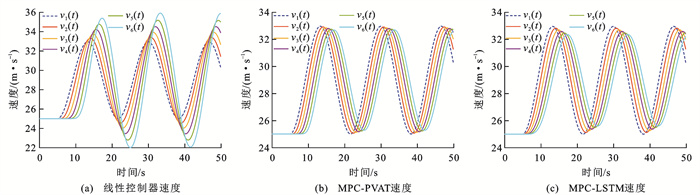
图 13 0.7 s延时条件下基于正弦运动工况的速度测试结果
Figure 13. Speed test results with 0.7 s delay under sinusoidal scenario

图 14 1.5 s延时条件下基于正弦运动工况的速度测试结果
Figure 14. Speed test results with 1.5 s delay under sinusoidal scenario

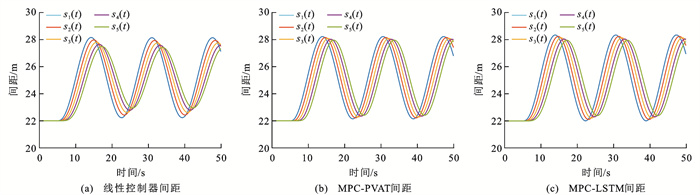
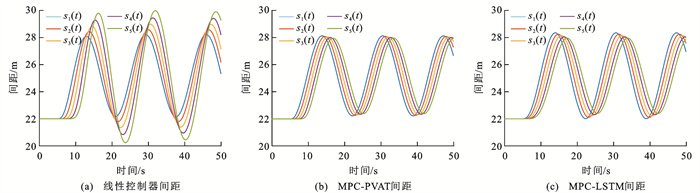
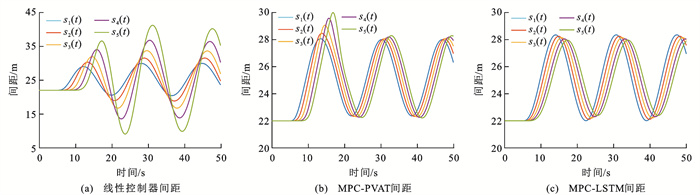
图 15 无延时条件下基于正弦运动工况的间距测试结果
Figure 15. Distance test results without delay under sinusoidal scenario

图 16 0.4 s延时条件下基于正弦运动工况的间距测试结果
Figure 16. Distance test results with 0.4 s delay under sinusoidal scenario

图 17 0.7 s延时条件下基于正弦运动工况的间距测试结果
Figure 17. Distance test results with 0.7 s delay under sinusoidal scenario

图 18 1.5 s延时条件下基于正弦运动工况的间距测试结果
Figure 18. Distance test results with 1.5 s delay under sinusoidal scenario

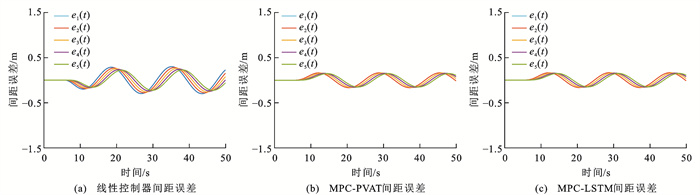
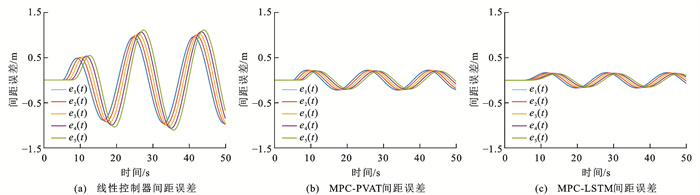
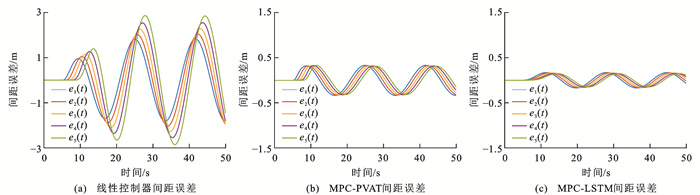
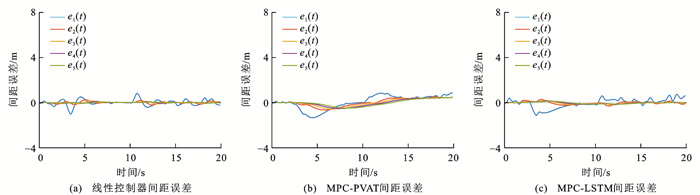
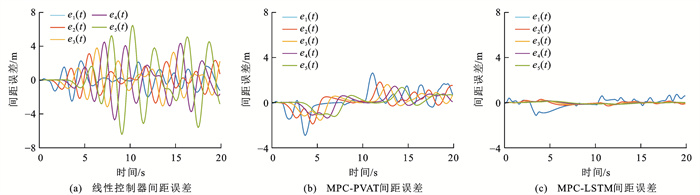
图 19 无延时条件下基于正弦运动工况的间距误差测试结果
Figure 19. Spacing error test results without delay under sinusoidal scenario

图 20 0.4 s延时条件下基于正弦运动工况的间距误差测试结果
Figure 20. Spacing error test results with 0.4 s delay under sinusoidal scenario

图 21 0.7 s延时条件下基于正弦运动工况的间距误差测试结果
Figure 21. Spacing error test results with 0.7 s delay under sinusoidal scenario

图 22 1.5 s延时条件下基于正弦运动工况的间距误差测试结果
Figure 22. Spacing error test results with 1.5 s delay under sinusoidal scenario

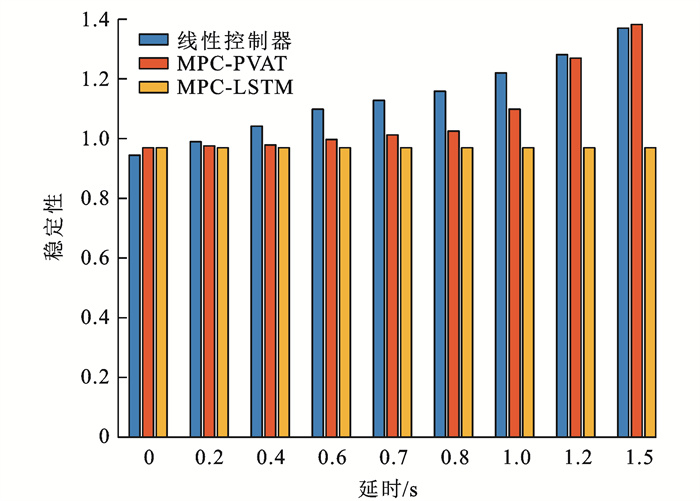
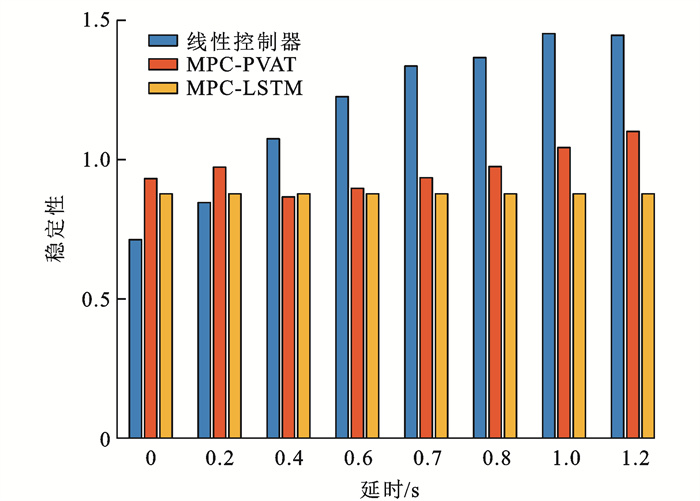
图 23 基于正弦运动工况测试中三种控制器在各延时条件下的系统弦稳定性量化指标
Figure 23. Quantified indicators of system string stability from three controllers with various delays in sinusoidal scenario test

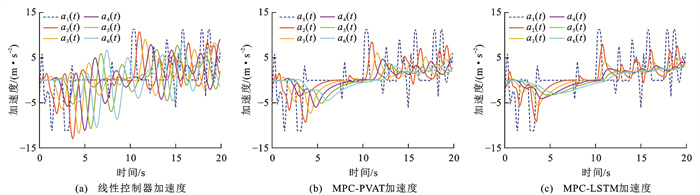
图 24 无延时条件下基于NGSIM数据的加速度测试结果
Figure 24. Acceleration test results without delay based on NGSIM data

图 25 0.4 s延时条件下基于NGSIM数据的加速度测试结果
Figure 25. Acceleration test results with 0.4 s delay based on NGSIM data

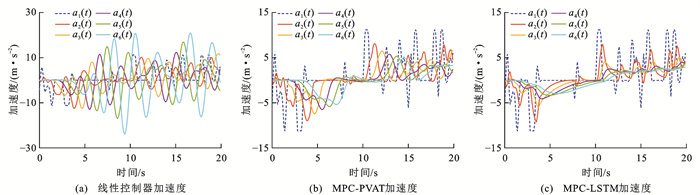
图 26 0.8 s延时条件下基于NGSIM数据的加速度测试结果
Figure 26. Acceleration test results with 0.8 s delay based on NGSIM data

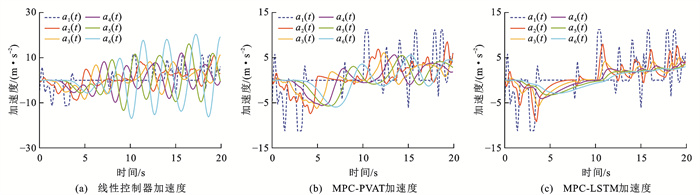
图 27 1.2 s延时条件下基于NGSIM数据的加速度测试结果
Figure 27. Acceleration test results with 1.2 s delay based on NGSIM data

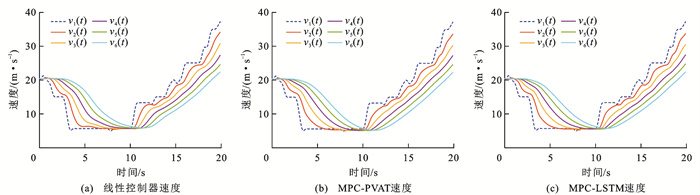
图 28 无延时条件下基于NGSIM数据的速度测试结果
Figure 28. Speed test results without delay based on NGSIM data

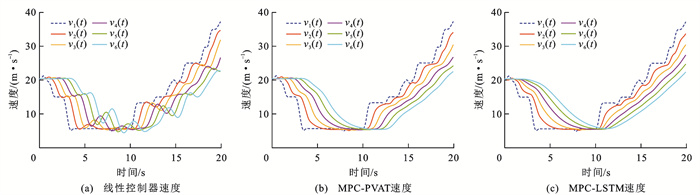
图 29 0.4 s延时条件下基于NGSIM数据的速度测试结果
Figure 29. Speed test results with 0.4 s delay based on NGSIM data

图 30 0.8 s延时条件下基于NGSIM数据的速度测试结果
Figure 30. Speed test results with 0.8 s delay based on NGSIM data

图 31 1.2 s延时条件下基于NGSIM数据的速度测试结果
Figure 31. Speed test results with 1.2 s delay based on NGSIM data

图 32 无延时条件下基于NGSIM数据的间距误差测试结果
Figure 32. Spacing error test results without delay based on NGSIM data

图 33 0.4 s延时条件下基于NGSIM数据的间距误差测试结果
Figure 33. Spacing error test results with 0.4 s delay based on NGSIM data

图 34 0.8 s延时条件下基于NGSIM数据的间距误差测试结果
Figure 34. Spacing error test results with 0.8 s delay based on NGSIM data

图 35 1.2 s延时条件下基于NGSIM数据的间距误差测试结果
Figure 35. Spacing error test results with 1.2 s delay based on NGSIM data

图 36 基于NGSIM数据测试中三种控制器在各延时条件下的系统弦稳定性量化指标
Figure 36. Quantified indicators of system string stability from three controllers with various delays based on NGSIM data in test
表 1 仿真主要参数设置
Table 1. Main parameters setting for simulation
参数 取值 车头时距/s 0.8 车辆长度/m 4 初始速度/(km·h-1) 90 预测时域/s 3 前车加速度控制增益 10 速度之差控制增益 3 间距误差控制增益 1 控制量增益 5 控制量约束上界/(m·s-2) -8 控制量约束下界/(m·s-2) 1.5 最大速度约束/(km·h-1) 120 最小间距约束/m 2  下载: 导出CSV
下载: 导出CSV
表 2 预测性能对比
Table 2. Prediction performance comparison
预测方法 拟合优度指标 均方根误差 LSTM 0.766 2.132 RNNs 0.739 2.248 GRUs 0.544 2.976
下载: 导出CSV
-
[1] RAJAMANI R, TAN H S, LAW B K, et al. Demonstration of integrated longitudinal and lateral control for the operation of automated vehicles in platoons[J]. IEEE Transactions on Control Systems Technology, 2000, 8(4): 695-708. doi: 10.1109/87.852914 [2] FERNANDES P, NUNES U. Platooning with IVC-enabled autonomous vehicles: strategies to mitigate communication delays, improve safety and traffic flow[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(1): 91-106. doi: 10.1109/TITS.2011.2179936 [3] XU Zhi-gang, WANG Yu, WANG Guan-qun, et al. Trajectory optimization for a connected automated traffic stream: comparison between an exact model and fast heuristics[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(5): 2969-2978. doi: 10.1109/TITS.2020.2978382 [4] ZHAO Xiang-mo, WANG Zhen, XU Zhi-gang, et al. Field experiments on longitudinal characteristics of human driver behavior following an autonomous vehicle[J]. Transportation Research Part C: Emerging Technologies, 2020, 114: 205-224. doi: 10.1016/j.trc.2020.02.018 [5] BONNET C, FRITZ H. Fuel consumption reduction in a platoon: experimental results with two electronically coupled trucks at close spacing[R]. Warrendale: SAE International, 2000. [6] FRITZ H, GERN A, SCHIEMENZ H, et al. CHAUFFEUR assistant-a driver assistance system for commercial vehicles based on fusion of advanced ACC and lane keeping[C]//IEEE. 2004 IEEE Intelligent Vehicles Symposium. New York: IEEE, 2004: 495-500. [7] CHAN E. SARTRE automated platooning vehicles[J]. Towards Innovative Freight and Logistics, 2016, 2: 137-150. [8] EILERS S, MÅRTENSSON J, PETTERSSON H, et al. COMPANION: towards co-operative platoon management of heavy-duty vehicles[C]//IEEE. 2015 IEEE 18th International Conference on Intelligent Transportation Systems. New York: IEEE, 2015: 1267-1273. [9] VANDERWERF J, SHLADOVER S, KOURJANSKAIA N, et al. Modeling effects of driver control assistance systems on traffic[J]. Transportation Research Record, 2001, 1748(1): 167-174. doi: 10.3141/1748-21 [10] DARBHA S, KONDURI S, PAGILLA P R. Benefits of V2V communication for autonomous and connected vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(5): 1954-1963. doi: 10.1109/TITS.2018.2859765 [11] NAUS G J L, VUGTS R P A, PLOEG J, et al. String-stable CACC design and experimental validation: a frequency-domain approach[J]. IEEE Transactions on Vehicular Technology, 2010, 59(9): 4268-4279. doi: 10.1109/TVT.2010.2076320 [12] DEY K C, YAN Li, WANG Xu-jie, et al. A review of communication, driver characteristics, and controls aspects of cooperative adaptive cruise control(CACC)[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(2): 491-509. doi: 10.1109/TITS.2015.2483063 [13] RAJAMANI R, ZHU Chun-yu. Semi-autonomous adaptive cruise control systems[J]. IEEE Transactions on Vehicular Technology, 2002, 51(5): 1186-1192. doi: 10.1109/TVT.2002.800617 [14] 徐志刚, 李金龙, 赵祥模, 等. 智能公路发展现状与关键技术[J]. 中国公路学报, 2019, 32(8): 1-24. doi: 10.19721/j.cnki.1001-7372.2019.08.001XU Zhi-gang, LI Jin-long, ZHAO Xiang-mo, et al. A review on intelligent road and its related key technologies[J]China Journal of Highway and Transport, 2019, 32(8): 1-24. (in Chinese) doi: 10.19721/j.cnki.1001-7372.2019.08.001 [15] ZHENG Yang, LI S E, LI Ke-qiang, et al. Distributed model predictive control for heterogeneous vehicle platoons under unidirectional topologies[J]. IEEE Transactions on Control Systems Technology, 2017, 25(3): 899-910. doi: 10.1109/TCST.2016.2594588 [16] LIU Xiang-heng, GOLDSMITH A, MAHAL S S, et al. Effects of communication delay on string stability in vehicle platoons[C]//IEEE. 2001 IEEE Conference on Intelligent Transportation Systems. New York: IEEE, 2001: 625-630. [17] SWAROOP D V A H G. String stability of interconnected systems: an application to platooning in automated highway systems[D]. Berkeley: University of California, Berkeley, 1994. [18] XU Zhi-gang, JIANG Zi-jun, WANG Guan-qun, et al. When the automated driving system fails: dynamics of public responses to automated vehicles[J]. Transportation Research Part C: Emerging Technologies, 2021, 129: 103271. doi: 10.1016/j.trc.2021.103271 [19] QIN W B, OROSZ G. Experimental validation of string stability for connected vehicles subject to information delay[J]. IEEE Transactions on Control Systems Technology, 2020, 28(4): 1203-1217. doi: 10.1109/TCST.2019.2900609 [20] ZHANG Yu-qin, TIAN Bin, XU Zhi-gang, et al. A local traffic characteristic based dynamic gains tuning algorithm for cooperative adaptive cruise control considering wireless communication delay[J]. Transportation Research Part C: Emerging Technologies, 2022, 142: 103766. doi: 10.1016/j.trc.2022.103766 [21] PLOEG J, SCHEEPERS B T M, VAN NUNEN E, et al. Design and experimental evaluation of cooperative adaptive cruise control[C]//IEEE. 2011 14th International IEEE Conference on Intelligent Transportation Systems. New York: IEEE, 2011: 260-265. [22] WANG Meng, DAAMEN W, HOOGENDOORN S P, et al. Rolling horizon control framework for driver assistance systems. Part Ⅰ: mathematical formulation and non-cooperative systems[J]. Transportation Research Part C: Emerging Technologies, 2014, 40: 271-289. doi: 10.1016/j.trc.2013.11.023 [23] WANG Meng, DAAMEN W, HOOGENDOORN S P, et al. Rolling horizon control framework for driver assistance systems. Part Ⅱ: cooperative sensing and cooperative control[J]. Transportation Research Part C: Emerging Technologies, 2014, 40: 290-311. doi: 10.1016/j.trc.2013.11.024 [24] ZHANG Yu, BAI Yu, WANG Meng, et al. Cooperative adaptive cruise control with robustness against communication delay: an approach in the space domain[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(9): 5496-5507. doi: 10.1109/TITS.2020.2987746 [25] WANG Meng, HOOGENDOORN S P, DAAMEN W, et al. Delay-compensating strategy to enhance string stability of adaptive cruise controlled vehicles[J]. Transportmetrica B: Transport Dynamics, 2018, 6(3): 211-229. doi: 10.1080/21680566.2016.1266973 [26] MAXIM A, CARUNTU C F, LAZAR C. Distributed model predictive control algorithm for vehicle platooning[C]//IEEE. 2016 20th International Conference on System Theory, Control and Computing (ICSTCC). New York: IEEE, 2016: 657-662. [27] NAUS G, VAN DEN BLEEK R, PLOEG J, et al. Explicit MPC design and performance evaluation of an ACC Stop-&-Go[C]//IEEE. 2008 American Control Conference. New York: IEEE, 2008: 224-229. [28] ZHOU Yang, AHN S. Robust local and string stability for a decentralized car following control strategy for connected automated vehicles[J]. Transportation Research Part B: Methodological, 2019, 125: 175-196. doi: 10.1016/j.trb.2019.05.003 [29] PLOEG J, SEMSAR-KAZEROONI E, LIJSTER G, et al. Graceful degradation of cooperative adaptive cruise control[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(1): 488-497. doi: 10.1109/TITS.2014.2349498 [30] BESSELINK B, JOHANSSON K H. String stability and a delay-based spacing policy for vehicle platoons subject to disturbances[J]. IEEE Transactions on Automatic Control, 2017, 62(9): 4376-4391. doi: 10.1109/TAC.2017.2682421 [31] XIAO Ling-yun, GAO Feng. Practical string stability of platoon of adaptive cruise control vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4): 1184-1194. doi: 10.1109/TITS.2011.2143407 [32] KIM N, CHA S, PENG H. Optimal control of hybrid electric vehicles based on Pontryagin's minimum principle[J]. IEEE Transactions on Control Systems Technology, 2011, 19(5): 1279-1287. doi: 10.1109/TCST.2010.2061232 [33] HOOGENDOORN S, HOOGENDOORN R, WANG Meng, et al. Modeling driver, driver support, and cooperative systems with dynamic optimal control[J]. Transportation Research Record: Journal of the Transportation Research Board, 2012, 2316(1): 20-30. doi: 10.3141/2316-03 [34] TIAN Bin, WANG Guan-qun, XU Zhi-gang, et al. Communication delay compensation for string stability of CACC system using LSTM prediction[J]. Vehicular Communications, 2021, 29: 100333. doi: 10.1016/j.vehcom.2021.100333 [35] GAO Ying, LI Jin-long, XU Zhi-gang, et al. A novel image-based convolutional neural network approach for traffic congestion estimation[J]. Expert Systems with Applications, 2021, 180: 115037. doi: 10.1016/j.eswa.2021.115037 [36] LI Jin-long, XU Zhi-gang, FU Lan, et al. Domain adaptation from daytime to nighttime: a situation-sensitive vehicle detection and traffic flow parameter estimation framework[J]. Transportation Research Part C: Emerging Technologies, 2021, 124: 102946. doi: 10.1016/j.trc.2020.102946 -











 点击查看大图
点击查看大图

计量
- 文章访问数: 559
- HTML全文浏览量: 156
- PDF下载量: 144
- 被引次数: 0
