

-
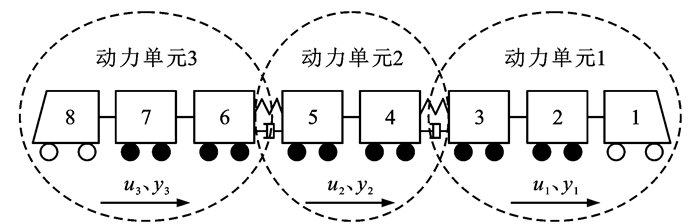
摘要: 针对动车组运行过程中存在非线性扰动、参数时变等问题,以提高动车组的速度跟踪精度和乘客舒适性要求为目标,提出了一种基于预测控制的高速动车组迭代学习控制方法;通过采集动车组先前运行过程中的输入输出数据,使用带遗忘因子的最小二乘法实时辨识广义预测控制(GPC)中的预测模型参数并计算预测输出,根据以往过程的平均模型误差修正该预测输出,利用修正后预测输出引出迭代学习控制律,在线实时计算得到新的控制量,实现动车组速度跟踪;采用修正后预测输出设计二次型迭代学习控制律,通过充分学习列车系统的重复性特性来解决传统比例积分微分(PID)型迭代学习参数整定难、收敛速度慢和鲁棒性差等问题,并给出算法的收敛性证明;以实验室配备的CRH380A型动车组半实物仿真平台对该方法进行了测试,建立了列车的三动力单元模型,使其跟踪设定速度曲线,并与一些传统算法进行对比。仿真结果表明:在第8次迭代过程,基于预测控制的高速动车组迭代学习控制方法得到的动力单元速度与其设定的速度和加速度误差分别在0.3 km·h-1和0.5 m·s-2以内,且变化平稳,其性能优于PID、GPC和P型迭代学习控制(P-ILC),满足列车跟踪精度与乘客舒适性要求;在模型参数突变的情况下,采用提出的方法可使列车更为及时地校正模型失配、时变和干扰等引起的不确定性。Abstract: Addressing the issues of nonlinear disturbance and time-varying parameters in the operation of electric multiple units (EMUs), an iterative learning control method for EMUs based on the predictive control was proposed to improve the speed tracking accuracy and passenger comfort requirements of EMUs. By collecting the input and output data from the previous operation of the EMUs, the least square method with a forgetting factor was used to identify the parameters of the predictive model in the generalized predictive control (GPC) in real time and calculate the predicted output. The predicted output was corrected based on the average model error from the previous process, and the iterative learning control law was derived from the corrected predicted output. The new control quantity was calculated in real time through the online calculation to realize the speed tracking of the EMUs. The modified predictive output was adopted to design the quadratic iterative learning control law. The problems of difficult parameter tuning, slow convergence speed and poor robustness of the traditional proportional integral differential (PID) iterative learning were solved by fully learning the repetitive characteristics of the train system. In addition, the convergence proof of the algorithm was provided. The proposed method was tested using the semi-physical simulation platform of CRH380A EMUs equipped in the laboratory. A three-power unit model of the train was established to track the set speed curve, and a comparison was made with some traditional algorithms. Simulation results show that in the eighth iteration process, the iterative learning control method for high-speed EMUs based on the predictive control achieves the power unit speed and acceleration errors within 0.3 km·h-1 and 0.5 m·s-2, respectively, and the changes are stable. Its performance is better than PID, GPC and proportional iterative learning control (P-ILC), and meets the requirements of train tracking accuracy and passenger comfort. In the case of sudden changes in model parameters, the proposed method can enable the train to timely correct the uncertainties caused by the model mismatch, time-variation and interference.
-

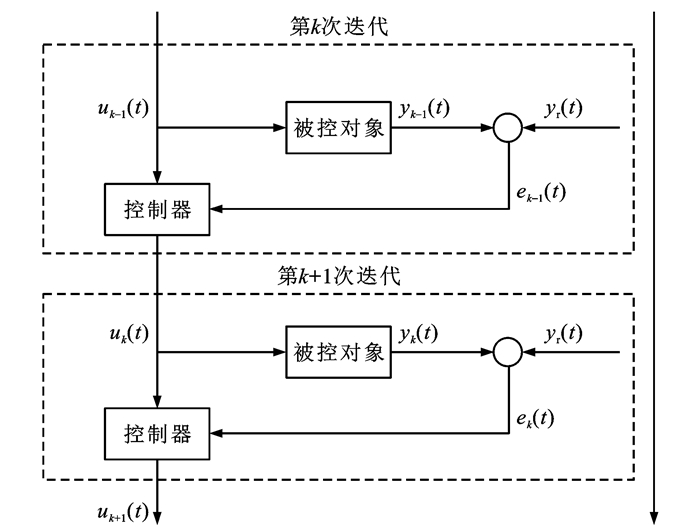
图 3 基于GPC的动车组迭代学习控制算法
Figure 3. Iterative learning control algorithm for EMUs based on GPC

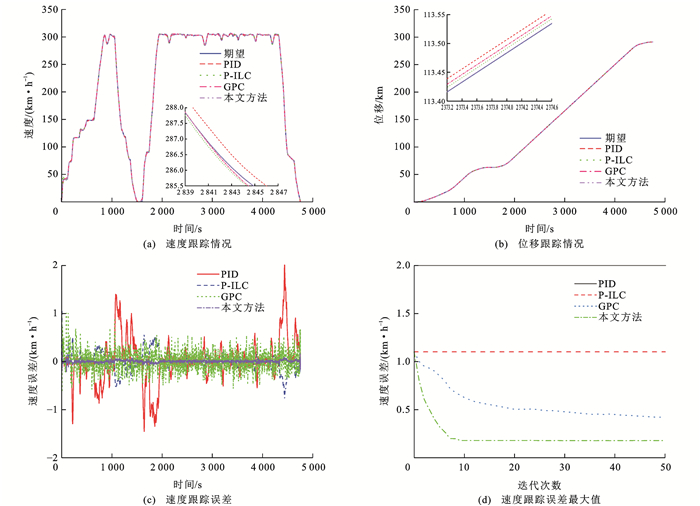
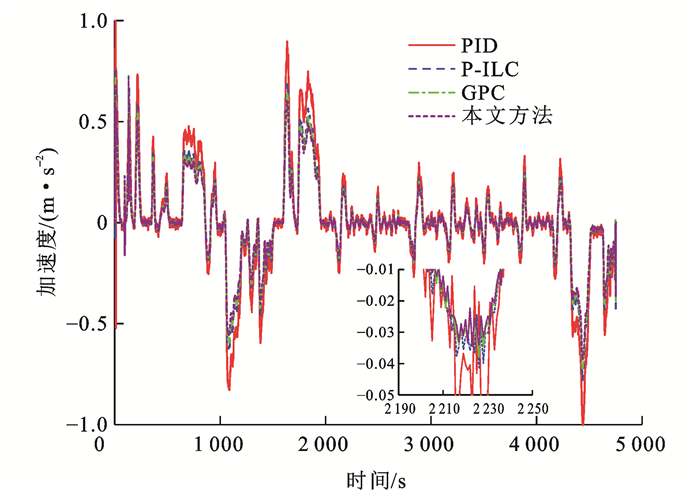
图 8 参数突变时各种方法的控制效果
Figure 8. Control effects of various methods in case of parameter sudden change
表 1 CRH380A模型参数
Table 1. Model parameters of CRH380A
参数名称 数值 θ1 (-0.939 1, 0.167 2, 0.012 5, 0.008 3) θ2 (-0.938 9, 0.012 6, 0.168 6, 0.012 6) θ3 (-0.939 1, 0.008 4, 0.012 6, 0.167 5)  下载: 导出CSV
下载: 导出CSV
表 2 各控制方法的跟踪误差
Table 2. Tracking errors of each control method
方法 速度误差/(km·h-1) 总位移误差/km PID (-1.493, 1.985) 0.647 1 GPC (-0.993, 1.157) 0.327 7 P-ILC (-0.685, 0.664) 0.188 7 本文方法 (-0.291, 0.282) 0.076 1
下载: 导出CSV
表 3 各控制方法的若干性能指标
Table 3. Several performance indexes of each control method
方法 均方根误差/(km·h-1) 最大加/减速度/(m·s-2) PID 1.6×10-1 0.847 1 GPC 6.1×10-2 0.587 4 P-ILC 1.5×10-2 0.784 5 本文方法 7.8×10-3 0.568 1
下载: 导出CSV
-
[1] 谢国, 张丹, 黑新宏, 等. 高速列车纵向动力学模型时变参数在线辨识方法[J]. 交通运输工程学报, 2017, 17(1): 71-81. doi: 10.3969/j.issn.1671-1637.2017.01.009XIE Guo, ZHANG Dan, HEI Xin-hong, et al. Online identification method of time-varying parameters for longitudinal dynamics model of high-speed train[J]. Journal of Traffic and Transportation Engineering, 2017, 17(1): 71-81. (in Chinese) doi: 10.3969/j.issn.1671-1637.2017.01.009 [2] 何之煜, 徐宁. 非参数化迭代学习控制的列车自动驾驶控制算法[J]. 铁道学报, 2020, 42(12): 90-96. doi: 10.3969/j.issn.1001-8360.2020.12.012HE Zhi-yu, XU Ning. Research on automatic train operation algorithm based on non-parametric iterative learning control[J]. Journal of the China Railway Society, 2020, 42(12): 90-96. (in Chinese) doi: 10.3969/j.issn.1001-8360.2020.12.012 [3] 张淼, 张琦, 刘文韬, 等. 一种基于策略梯度强化学习的列车智能控制方法[J]. 铁道学报, 2020, 42(1): 69-75. doi: 10.3969/j.issn.1001-8360.2020.01.010ZHANG Miao, ZHANG Qi, LIU Wen-tao, et al. A policy-based reinforcement learning algorithm for intelligent train control[J]. Journal of the China Railway Society, 2020, 42(1): 69-75. (in Chinese) doi: 10.3969/j.issn.1001-8360.2020.01.010 [4] 王明主. 基于模糊自适应PID的重载列车辅助驾驶策略研究[D]. 北京: 北京交通大学, 2019.WANG Ming-zhu. Research on assistant driving strategy of heavy haul train based on fuzzy adaptive PID[D]. Beijing: Beijing Jiaotong University, 2019. (in Chinese) [5] 李中奇, 许健. 基于改进模糊PID-Smith控制器的高速动车组停车方法[J]. 交通运输工程学报, 2020, 20(4): 145-154. doi: 10.19818/j.cnki.1671-1637.2020.04.011LI Zhong-qi, XU Jian. High-speed EMU parking method based on improved fuzzy PID-Smith controller[J]. Journal of Traffic and Transportation Engineering, 2020, 20(4): 145-154. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2020.04.011 [6] GOU Lin-feng, ZHOU Zi-han, SHEN Ya-wen, et al. Predictive control of turbofan engine model based on improved Elman neural network[C]//FU Min-yue, SUN Jian. Proceedings of the 38th China Control Conference. Shanghai: Shanghai Systems Science Press, 2019: 1311-1316. [7] 杨辉, 张芳, 张坤鹏, 等. 基于分布式模型的动车组预测控制方法[J]. 自动化学报, 2014, 40(9): 1912-1921. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201409010.htmYANG Hui, ZHANG Fang, ZHANG Kun-peng, et al. Predictive control using a distributed model for electric multiple unit[J]. Acta Automatica Sinica, 2014, 40(9): 1912-1921. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201409010.htm [8] 杨辉, 张坤鹏, 王昕, 等. 高速列车多模型广义预测控制方法[J]. 铁道学报, 2011, 33(8): 80-87. doi: 10.3969/j.issn.1001-8360.2011.08.014YANG Hui, ZHANG Kun-peng, WANG Xin, et al. Generalized multiple model predictive control method of high-speed train[J]. Journal of the China Railway Society, 2011, 33(8): 80-87. (in Chinese) doi: 10.3969/j.issn.1001-8360.2011.08.014 [9] 李中奇, 杨振村, 杨辉, 等. 高速列车双自适应广义预测控制方法[J]. 中国铁道科学, 2015, 36(6): 120-127. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK201506018.htmLI Zhong-qi, YANG Zhen-cun, YANG Hui, et al. Generalized predictive control with dual adaptation method of high-speed train[J]. China Railway Science, 2015, 36(6): 120-127. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK201506018.htm [10] GAO Shi-gen, WEI Jin, SONG Hai-feng, et al. Fuzzy adaptive automatic train operation control with protection constraints: a residual nonlinearity approximation-based approach[J]. Engineering Applications of Artificial Intelligence, 2020, 96(2): 103986. [11] 王龙生. 基于多质点模型的高速列车自动驾驶预测控制[D]. 北京: 北京交通大学, 2016.WANG Long-sheng. Predictive control for automatic operation of high-speed trains based on multi-point model[D]. Beijing: Beijing Jiaotong University, 2016. (in Chinese) [12] SUN He-qing, HOU Zhong-sheng, TANG Tao. An iterative learning approach for train trajectory tracking control[J]. IFAC Proceedings Volumes, 2011, 44(1): 14916-14921. doi: 10.3182/20110828-6-IT-1002.01270 [13] WANG Yi, HOU Zhong-sheng, LI Xing-yi. A novel automatic train operation algorithm based on iterative learning control theory[C]//IEEE. 2008 IEEE International Conference on Service Operations and Logistics, and Informatics. New York: IEEE, 2008: 1766-1770. [14] 段莉. 数据驱动迭代学习控制及在列车自动驾驶控制系统中的应用[D]. 北京: 北京交通大学, 2020.DUAN Li. Data-based iterative learning control with applications in automatic train operation[D]. Beijing: Beijing Jiaotong University, 2020. (in Chinese) [15] 何之煜. 自适应迭代学习控制在列车自动驾驶系统中的应用[D]. 北京: 中国铁道科学研究院, 2019.HE Zhi-yu. Applications in automatic train operation system with adaptive iterative learning control[D]. Beijing: China Academy of Railway Sciences, 2019. (in Chinese) [16] 余琼霞. 迭代学习辨识与控制及在高速列车运行控制系统中的应用[D]. 北京: 北京交通大学, 2017.YU Qiong-xia. Iterative learning identification and control with applications in high-speed train operation control system[D]. Beijing: Beijing Jiaotong University, 2017. (in Chinese) [17] 李中奇. 高速动车组自适应速度跟踪控制[D]. 南昌: 南昌大学, 2015.LI Zhong-qi. Adaptive speed tracking control for high-speed EMU[D]. Nanchang: Nanchang University, 2015. (in Chinese) [18] 耿睿, 李中奇, 杨辉. 动车组的多变量非线性预测控制研究[J]. 华东交通大学学报, 2021, 38(2): 61-66, 142. https://www.cnki.com.cn/Article/CJFDTOTAL-HDJT202102009.htmGENG Rui, LI Zhong-qi, YANG Hui. Multivariable nonlinear predictive control of EMU[J]. Journal of East China Jiaotong University, 2021, 38(2): 61-66, 142. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HDJT202102009.htm [19] ZHAO Ji-peng, TONG Shao-cheng, LI Yong-ming. Observer- based fuzzy adaptive control for MIMO nonlinear systems with non-constant control gain and input delay[J]. IET Control Theory and Applications, 2021, 15(11): 1488-1505. doi: 10.1049/cth2.12138 [20] 樊雷. 基于广义预测控制的迭代学习算法在间歇过程中的应用[D]. 杭州: 浙江大学, 2006.FAN Lei. Research on iterative learning control and its application on batch process based on generalized predictive control[D]. Hangzhou: Zhejiang University, 2006. (in Chinese) [21] BU Xu-hui, YU Wei, YU Qiong-xia, et al. Event-triggered model-free adaptive iterative learning control for a class of nonlinear systems over fading channels[J]. IEEE Transactions on Cybernetics, 2022, 52(9): 9597-9608. [22] WANG Deng-feng, XIE Chong, WANG Shuang. An adaptive RBF neural network-based multi-objective optimization method for lightweight and crashworthiness design of cab floor rails using fuzzy subtractive clustering algorithm[J]. Structural and Multidisciplinary Optimization, 2021, 63(2): 915-928. [23] DAI Ming-guang, QI Rong, ZHAO Yi-yun, et al. PD-type iterative learning control with adaptive learning gains for high-performance load torque tracking of electric dynamic load simulator[J]. Electronics, 2021, 10(7): 811. [24] 高飞, 慕春棣, 朱纪洪. 针对一类受限系统的优化迭代学习控制律[J]. 清华大学学报(自然科学版), 2013, 53(11): 1629-1636. https://www.cnki.com.cn/Article/CJFDTOTAL-QHXB201311022.htmGAO Fei, MU Chun-di, ZHU Ji-hong. Optimization iterative learning control for constrained systems[J]. Journal of Tsinghua University (Science and Technology), 2013, 53(11): 1629-1636. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QHXB201311022.htm [25] 李中奇, 丁俊英, 杨辉, 等. 基于控制器匹配的高速列车广义预测控制方法[J]. 铁道学报, 2018, 40(9): 82-89. https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB201809013.htmLI Zhong-qi, DING Jun-ying, YANG Hui, et al. Generalized predictive control tuning for high-speed train based on controller matching method[J]. Journal of the China Railway Society, 2018, 40(9): 82-89. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB201809013.htm [26] 付雅婷, 杨辉. 基于多工况ANFIS模型的高速动车组运行速度控制[J]. 铁道学报, 2019, 41(4): 33-40. https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB201904006.htmFU Ya-ting, YANG Hui. Speed control of high-speed electric multiple unit using a multiple operating condition ANFIS model[J]. Journal of the China Railway Society, 2019, 41(4): 33-40. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB201904006.htm [27] 张亚东, 王硕, 李亚, 等. 基于STPA与多智能体的列控运营场景危险分析及仿真验证方法[J]. 中国铁道科学, 2021, 42(1): 147-155. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK202101018.htmZHANG Ya-dong, WANG Shuo, LI Ya, et al. Hazard analysis and simulation verification method of train control operation scenarios based on STPA and multi-agent[J]. China Railway Science, 2021, 42(1): 147-155. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK202101018.htm [28] HUANG De-qing, CHEN Yong, MENG De-yuan, et al. Adaptive iterative learning control for high-speed train: a multi-agent approach[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(7): 4067-4077. [29] LI Yang, YANG Xin, WU Jian-jun, et al. Discrete-event simulations for metro train operation under emergencies: a multi-agent based model with parallel computing[J]. Physica A: Statistical Mechanics and its Applications, 2021, 573: 125964. [30] SHU Yi-dan, ZHAO Jin-song. A simplified Markov-based approach for safety integrity level verification[J]. Journal of Loss Prevention in the Process Industries, 2014, 29: 262-266. [31] 贾超. 考虑安全约束的列车自动驾驶多质点非线性预测控制[D]. 北京: 北京交通大学, 2020.JIA Chao. Nonlinear predictive control for automatic train operation with consideration of safety constraints and multi-point model[D]. Beijing: Beijing Jiaotong University, 2020. (in Chinese) -



 点击查看大图
点击查看大图
计量
- 文章访问数: 480
- HTML全文浏览量: 158
- PDF下载量: 69
- 被引次数: 0
