

Management and control method of dedicated lanes for mixed traffic flows with connected and automated vehicles
-
摘要: 分析了网联自动驾驶车辆(CAV)混合交通流中各车辆类型及其跟驰模式下的车头间距,从通用性混合交通流特征层面理论推导了各车头间距模式的概率表达式,从而对混合交通流进行了数学描述;以混合交通流整体通行流率最大为目标,计算了多车道混合交通流中一个CAV专用道的设置条件以及专用道设置后CAV交通流在专用道和混合道上的最优交通流分配比例,将一个CAV专用道情形推广至多个CAV专用道动态管控的一般性情形,构建了混合交通流专用道动态管控的分析方法;应用案例分析论证了CAV专用道管控方法的有效性。研究结果表明:在交通需求为2 000 veh·h-1时,各CAV渗透率阶段均无需设置CAV专用道;在交通需求为3 000 veh·h-1时,需在CAV渗透率为0.2~0.4的阶段下考虑设置CAV专用道;在交通需求为5 000 veh·h-1时,需考虑在各CAV渗透率阶段下设置CAV专用道;提出的CAV专用道管控方法可根据交通需求和车道总数等条件定量化计算不同CAV渗透率阶段下的最优CAV专用道数量以及CAV交通流最优分配比例,且交通需求能够影响反映CAV专用道设置条件的临界CAV渗透率范围,交通需求和车道总数量可分别从交通需求属性和道路空间属性方面促进最优CAV专用道数量的提升,符合多车道场景混合交通流CAV专用道管控的特性。Abstract: The vehicle types in the mixed traffic flow with connected and automated vehicles (CAV) and the headways under the car-following mode were analyzed, and the probability expressions of each headway mode were theoretically deduced according to the features of general mixed traffic flows, so as to mathematically describe the mixed traffic flow. In order to maximize the overall passing rate of mixed traffic flows, the setting conditions of a CAV dedicated lane in multi-lane mixed traffic flows and the optimal traffic flow distribution ratios of CAV traffic flows on the dedicated lane and the mixed lane after setting the dedicated lane were calculated. By extending the case of one CAV dedicated lane to the general case of dynamic management and control of multiple CAV dedicated lanes, an analysis method for dynamic management and control of dedicated lanes for the mixed traffic flows was constructed. Case analysis was used to demonstrate the effectiveness of the proposed management and control method of CAV dedicated lanes. Research results show that when traffic demand is 2 000 veh·h-1, there is no need to set up CAV dedicated lanes in each CAV permeability stage. When the traffic demand is 3 000 veh·h-1, CAV dedicated lanes should be set up at the CAV permeability stage of 0.2-0.4. When the traffic demand is 5 000 veh·h-1, it is necessary to consider setting up CAV dedicated lanes in each CAV permeability stage. The optimal numbers of CAV dedicated lanes and the optimal distribution ratios of CAV traffic flows at different CAV permeability stages can be quantitatively calculated by the proposed CAV dedicated lane management and control method according to the conditions of traffic demand and the total number of lanes, and the critical CAV permeability range reflecting the setting conditions of CAV dedicated lanes can be affected by the traffic demand. The increase in the optimal number of dedicated lanes from the traffic demand attribute and the road space attribute can be promoted by the traffic demand and the total number of lanes, respectively, which is in line with the characteristics of dedicated lane management and control in multi-lane scenarios for mixed traffic flows.
-

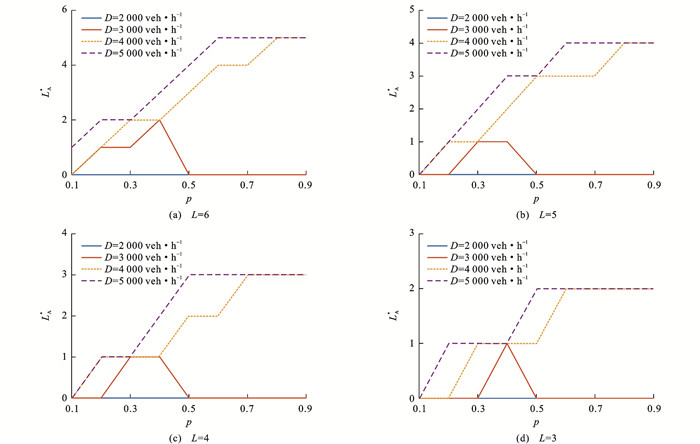
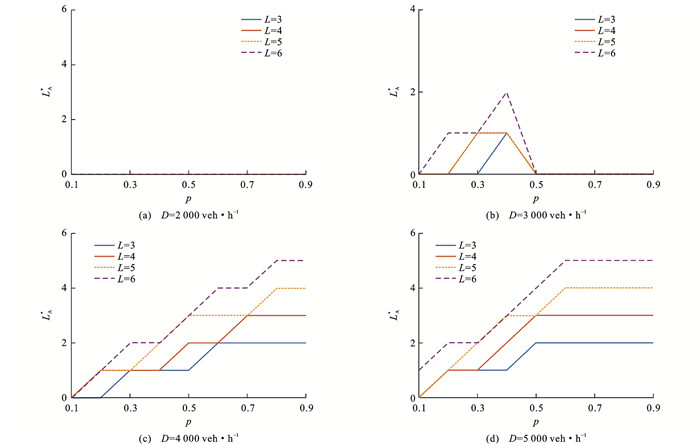
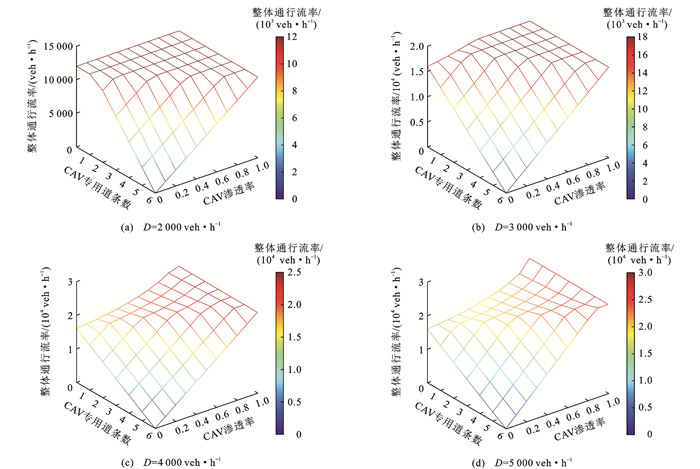
图 1 p和LA影响下的混合交通流整体通行流率
Figure 1. Overall passing rates of mixed traffic flow under influences of p and LA
表 1 混合交通流中车头间距
Table 1. Headways in mixed traffic flow
编号 车头间距 后车类型 前车类型 1 SII CAV→CACC CAV 2 SIC CAV→CACC CV 3 SIR CAV→ACC RV 4 SCI CV CAV 5 SCC CV CV 6 SCR CV→RV RV 7 SRI RV CAV 8 SRC RV CV 9 SRR RV RV  下载: 导出CSV
下载: 导出CSV
表 2 CAV专用道管控案例分析结果(L=6)
Table 2. Case analysis results of CAV dedicated lane management and control (L=6)
p D=2 000 veh·h-1 D=3 000 veh·h-1 D=4 000 veh·h-1 D=5 000 veh·h-1 LA* p1* p2* LA* p1* p2* LA* p1* p2* LA* p1* p2* 0.1 0 0.00 0.10 0 0.00 0.10 0 0.00 0.10 1 0.10 0.00 0.2 0 0.00 0.20 1 0.20 0.00 1 0.18 0.02 2 0.20 0.00 0.3 0 0.00 0.30 1 0.25 0.05 2 0.30 0.00 2 0.29 0.01 0.4 0 0.00 0.40 2 0.40 0.00 2 0.37 0.03 3 0.40 0.00 0.5 0 0.00 0.50 0 0.00 0.50 3 0.50 0.00 4 0.50 0.00 0.6 0 0.00 0.60 0 0.00 0.60 4 0.60 0.00 5 0.60 0.00 0.7 0 0.00 0.70 0 0.00 0.70 4 0.70 0.00 6→5 0.70 0.00 0.8 0 0.00 0.80 0 0.00 0.80 5 0.80 0.00 6→5 0.74 0.06 0.9 0 0.00 0.90 0 0.00 0.90 6→5 0.90 0.00 6→5 0.74 0.16
下载: 导出CSV
表 3 CAV专用道管控案例分析结果(L=5)
Table 3. Case analysis results of CAV dedicated lane management and control (L=5)
p D=2 000 veh·h-1 D=3 000 veh·h-1 D=4 000 veh·h-1 D=5 000 veh·h-1 LA* p1* p2* LA* p1* p2* LA* p1* p2* LA* p1* p2* 0.1 0 0.00 0.10 0 0.00 0.10 0 0.00 0.10 0 0.00 0.10 0.2 0 0.00 0.20 0 0.00 0.20 1 0.20 0.00 1 0.18 0.02 0.3 0 0.00 0.30 1 0.29 0.01 1 0.22 0.08 2 0.30 0.00 0.4 0 0.00 0.40 1 0.29 0.11 2 0.40 0.00 3 0.40 0.00 0.5 0 0.00 0.50 0 0.00 0.50 3 0.50 0.00 3 0.50 0.00 0.6 0 0.00 0.60 0 0.00 0.60 3 0.60 0.00 4 0.60 0.00 0.7 0 0.00 0.70 0 0.00 0.70 3 0.66 0.04 5→4 0.70 0.00 0.8 0 0.00 0.80 0 0.00 0.80 4 0.80 0.00 5→4 0.71 0.09 0.9 0 0.00 0.90 0 0.00 0.90 4 0.88 0.02 5→4 0.71 0.19
下载: 导出CSV
表 4 CAV专用道管控案例分析结果(L=4)
Table 4. Case analysis results of CAV dedicated lane management and control (L=4)
p D=2 000 veh·h-1 D=3 000 veh·h-1 D=4 000 veh·h-1 D=5 000 veh·h-1 LA* p1* p2* LA* p1* p2* LA* p1* p2* LA* p1* p2* 0.1 0 0.00 0.10 0 0.00 0.10 0 0.00 0.10 0 0.00 0.10 0.2 0 0.00 0.20 0 0.00 0.20 1 0.20 0.00 1 0.20 0.00 0.3 0 0.00 0.30 1 0.30 0.00 1 0.28 0.02 1 0.22 0.08 0.4 0 0.00 0.40 1 0.37 0.03 1 0.28 0.12 2 0.40 0.00 0.5 0 0.00 0.50 0 0.00 0.50 2 0.50 0.00 3 0.50 0.00 0.6 0 0.00 0.60 0 0.00 0.60 2 0.55 0.05 3 0.60 0.00 0.7 0 0.00 0.70 0 0.00 0.70 3 0.70 0.00 4→3 0.66 0.04 0.8 0 0.00 0.80 0 0.00 0.80 3 0.80 0.00 4→3 0.66 0.14 0.9 0 0.00 0.90 0 0.00 0.90 4→3 0.83 0.07 4→3 0.66 0.24
下载: 导出CSV
表 5 CAV专用道管控案例分析结果(L=3)
Table 5. Case analysis results of CAV dedicated lane management and control (L=3)
p D=2 000 veh·h-1 D=3 000 veh·h-1 D=4 000 veh·h-1 D=5 000 veh·h-1 LA* p1* p2* LA* p1* p2* LA* p1* p2* LA* p1* p2* 0.1 0 0.00 0.10 0 0.00 0.10 0 0.00 0.10 0 0.00 0.10 0.2 0 0.00 0.20 0 0.00 0.20 0 0.00 0.20 1 0.20 0.00 0.3 0 0.00 0.30 0 0.00 0.30 1 0.30 0.00 1 0.29 0.01 0.4 0 0.00 0.40 1 0.40 0.00 1 0.37 0.03 1 0.29 0.11 0.5 0 0.00 0.50 0 0.00 0.50 1 0.37 0.13 2 0.50 0.00 0.6 0 0.00 0.60 0 0.00 0.60 2 0.60 0.00 2 0.59 0.01 0.7 0 0.00 0.70 0 0.00 0.70 2 0.70 0.00 3→2 0.59 0.11 0.8 0 0.00 0.80 0 0.00 0.80 2 0.74 0.06 3→2 0.59 0.21 0.9 0 0.00 0.90 0 0.00 0.90 2 0.74 0.16 3→2 0.59 0.31
下载: 导出CSV
-
[1] ZHONG Zi-jia, LEE E, NEJAD M, et al. Influence of CAV clustering strategies on mixed traffic flow characteristics: an analysis of vehicle trajectory data[J]. Transportation Research Part C: Emerging Technologies, 2020, 115: 102611. doi: 10.1016/j.trc.2020.102611 [2] 杨澜, 赵祥模, 吴国垣, 等. 智能网联汽车协同生态驾驶策略综述[J]. 交通运输工程学报, 2020, 20(5): 58-72. doi: 10.19818/j.cnki.1671-1637.2020.05.004YANG Lan, ZHAO Xiang-mo, WU Guo-yuan, et al. Review on connected and automated vehicles based cooperative eco-driving strategies[J]. Journal of Traffic and Transportation Engineering, 2020, 20(5): 58-72. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2020.05.004 [3] 吴兵, 王文璇, 李林波, 等. 多前车影响的智能网联车辆纵向控制模型[J]. 交通运输工程学报, 2020, 20(2): 184-194. doi: 10.19818/j.cnki.1671-1637.2020.02.015WU Bing, WANG Wen-xuan, LI Lin-bo, et al. Longitudinal control model for connected autonomous vehicles influenced by multiple preceding vehicles[J]. Journal of Traffic and Transportation Engineering, 2020, 20(2): 184-194. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2020.02.015 [4] CHEN Jian-zhong, LIANG Huan, LI Jing, et al. Connected automated vehicle platoon control with input saturation and variable time headway strategy[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(8): 4929-4940. [5] 秦严严, 张健, 陈凌志, 等. 手动-自动驾驶混合交通流元胞传输模型[J]. 交通运输工程学报, 2020, 20(2): 229-238. doi: 10.19818/j.cnki.1671-1637.2020.02.019QIN Yan-yan, ZHANG Jian, CHEN Ling-zhi, et al. Cell transmission model of mixed traffic flow of manual-automated driving[J]. Journal of Traffic and Transportation, 2020, 20(2): 229-238. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2020.02.019 [6] TANI R, SUMALEE A, SUMALEE K. Travel time reliability-based optimization problem for CAVs dedicated lanes[J]. Transportmetrica A: Transport Science, 2021, 18(3): 1-32. [7] TALEBPOUR A, MAHMASSANI H S, ELFAR A. Investigating the effects of reserved lanes for autonomous vehicles on congestion and travel time reliability[J]. Transportation Research Record, 2017(2622): 1-12. [8] LIU Hao, KAN Xin-gan, SHLADOVER S E, et al. Modeling impacts of cooperative adaptive cruise control on mixed traffic flow in multi-lane freeway facilities[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 261-279. doi: 10.1016/j.trc.2018.07.027 [9] XIAO Lin, WANG Meng, VAN AREM B. Traffic flow impacts of converting an HOV lane into a dedicated CACC lane on a freeway corridor[J]. IEEE Intelligent Transportation Systems Magazine, 2019, 12(1): 60-73. [10] GHIASI A, HUSSAIN O, QIAN Z S, et al. Lane management with variable lane width and model calibration for connected automated vehicles[J]. Journal of Transportation Engineering, Part A: Systems, 2020, 146(3): 04019075. doi: 10.1061/JTEPBS.0000283 [11] RAD S R, FARAH H, TAALE H, et al. Design and operation of dedicated lanes for connected and automated vehicles on motorways: a conceptual framework and research agenda[J]. Transportation Research Part C: Emerging Technologies, 2020, 117: 102664. doi: 10.1016/j.trc.2020.102664 [12] 林雨. 智能网联自动驾驶汽车专用道设置优化研究[D]. 长春: 吉林大学, 2021.LIN Yu. Research on the optimal deployment of dedicated connected autonomous vehicle lanes[D]. Changchun: Jilin University, 2021. (in Chinese) [13] 刘佳乐. 高速公路自动驾驶专用车道交通标志设计技术[D]. 西安: 长安大学, 2021.LIU Jia-le. Design technology of traffic signs for special lanes of automatic driving in expressway[D]. Xi'an: Chang'an University, 2021. (in Chinese) [14] 姚志洪, 郝慧君, 巫雪梅, 等. 考虑自动驾驶的混合交通流路段阻抗函数[J]. 交通运输工程与信息学报, 2021, 19(4): 1-12. https://www.cnki.com.cn/Article/CJFDTOTAL-JTGC202104001.htmYAO Zhi-hong, HAO Hui-jun, WU Xue-mei, et al. Cost function of mixed traffic flow with autonomous driving[J]. Journal of Transportation Engineering and Information, 2021, 19(4): 1-12. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JTGC202104001.htm [15] HUA Xue-dong, YU Wei-jie, WANG Wei, et al. Influence of lane policies on freeway traffic mixed with manual and connected and autonomous vehicles[J]. Journal of Advanced Transportation, 2020, 2020: 3968625. [16] WEAVER S, BALK S, PHILIPS B. Merging into strings of cooperative adaptive cruise control vehicles[J]. Journal of Intelligent Transportation Systems, 2021, 25(4): 401-411. doi: 10.1080/15472450.2020.1728264 [17] WANG Chao-jie, GONG Si-yuan, ZHOU An-ye, et al. Cooperative adaptive cruise control for connected autonomous vehicles by factoring communication-related constraints[J]. Transportation Research Part C: Emerging Technologies, 2020, 113: 124-145. doi: 10.1016/j.trc.2019.04.010 [18] GASPAR J, CARNEY C, SHULL E, et al. Mapping drivers' mental models of adaptive cruise control to performance[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2021, 81: 622-638. doi: 10.1016/j.trf.2021.07.012 [19] LI Tie-nan, CHEN Dan-jue, ZHOU Hao, et al. Car-following behavior characteristics of adaptive cruise control vehicles based on empirical experiments[J]. Transportation Research Part B: Methodological, 2021, 147: 67-91. [20] 邱志军, 杨唐涛, 檀基稳, 等. 网联环境下高速公路辅助驾驶车辆编队评估[J]. 中国公路学报, 2019, 32(12): 66-75. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201912008.htmQIU Zhi-jun, YANG Tang-tao, TAN Ji-wen, et al. Evaluation of assisted driving platooning on expressway in connected vehicle environment[J]. China Journal of Highway and Transport, 2019, 32(12): 66-75. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201912008.htm [21] 宗芳, 石佩鑫, 王猛, 等. 考虑前后多车的网联自动驾驶车辆混流跟驰模型[J]. 中国公路学报, 2021, 34(7): 105-117. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL202107009.htmZONG Fang, SHI Pei-xin, WANG Meng, et al. Connected and automated vehicle mixed-traffic car-following model considering states of multiple front and rear vehicles[J]. China Journal of Highway and Transport, 2021, 34(7): 105-117. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL202107009.htm [22] GHIASI A, HUSSAIN O, QIAN Zhen, et al. A mixed traffic capacity analysis and lane management model for connected automated vehicles: a Markov chain method[J]. Transportation Research Part B: Methodological, 2017, 106: 266-292. [23] 秦严严, 王昊, 王炜, 等. 混有CACC车辆和ACC车辆的异质交通流基本图模型[J]. 中国公路学报, 2017, 30(10): 127-136. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201710016.htmQIN Yan-yan, WANG Hao, WANG Wei, et al. Fundamental diagram model of heterogeneous traffic flow mixed with cooperative adaptive cruise control vehicles and adaptive cruise control vehicles[J]. China Journal of Highway and Transport, 2017, 30(10): 127-136. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201710016.htm [24] MILANES V, SHLADOVER S E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data[J]. Transportation Research Part C: Emerging Technologies, 2014, 48: 285-300. [25] 宗芳, 王猛, 曾梦, 等. 考虑多前车作用势的混行交通流车辆跟驰模型[J]. 交通运输工程学报, 2022, 22(1): 250-262. doi: 10.19818/j.cnki.1671-1637.2022.01.021ZONG Fang, WANG Meng, ZENG Meng, et al. Vehicle-following model in mixed traffic flow considering interaction potential of multiple front vehicles[J]. Journal of Traffic and Transportation Engineering, 2022, 22(1): 250-262. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2022.01.021 [26] JIANG Rui, WU Qing-song, ZHU Zuo-jin. Full velocity difference model for a car-following theory[J]. Physical Review E, 2001, 64(1): 017101. [27] ZHOU Tong, LI Yu-xuan, PENG Guang-han. Impact of the self-interruption probability involving the anticipation optimal velocity on traffic stability for car-following theory under V2X environment[J]. IEEE Access, 2021, 9: 111456-111462. [28] 王雪松, 孙平, 张晓春, 等. 基于自然驾驶数据的高速公路跟驰模型参数标定[J]. 中国公路学报, 2020, 33(5): 132-142. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL202005012.htmWANG Xue-song, SUN Ping, ZHANG Xiao-chun, et al. Calibrating car-following models on freeway based on naturalistic driving data[J]. China Journal of Highway and Transport, 2020, 33(5): 132-142. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL202005012.htm [29] TREIBER M, HENNECKE A, HELBING D. Congested traffic states in empirical observations and microscopic simulations[J]. Physical Review E, 2000, 62(2): 1805-1824. [30] QIN Yan-yan, WANG Hao, NI Dai-heng. Lighthill-Whitham-Richards model for traffic flow mixed with cooperative adaptive cruise control vehicles[J]. Transportation Science, 2021, 55(4): 883-907. -

 点击查看大图
点击查看大图
计量
- 文章访问数: 1402
- HTML全文浏览量: 288
- PDF下载量: 214
- 被引次数: 0
