

Car-following model and optimization strategy for connected and automated vehicles under mixed traffic environment
-
摘要: 为进一步提高混合交通环境下车辆的行车效率与交通流的稳定性,在考虑后视效应的基础上,融合多辆前车速度与加速度等状态信息,以指数平滑方式构建了网联自动驾驶车辆(CAV)跟驰模型;在此基础上,研究了前后方车辆数和状态信息完整度对模型稳定性的影响,结合Lyapunov第一方法和线性谐波微扰法进行了线性稳定性分析,并确定了模型最优参数;利用混合交通环境特性,在考虑通信信息丢失的情况下提出了CAV在不同位置和状态下的跟驰策略,并在该策略支撑下进行了不同CAV渗透率的车辆启动、车辆刹车停止、环形道路3个典型场景下的数值仿真。研究结果表明:在刹车停止场景中,全部车辆的停止波速最大提高了26.1%;在车辆启动场景中,启动波速最大提高了15.5%,车辆加速度和速度变化更为平缓;在环形道路场景中,当混合交通流中CAV渗透率由40%提高至100%时,在较大扰动条件下车辆的平均速度波动时间相较于低CAV渗透率场景下降了44.8%,波峰下降了5.7%,波谷上升了19.4%,而CAV渗透率较低时提出的优化策略对混合交通流的改善并不明显。由此可见,在当前构建实际混合交通环境与开展CAV实车试验比较困难的情况下,该跟驰模型和策略可用于车辆跟驰仿真与特定场景下的测试验证,能够有效保障混合交通环境中的交通流扰动吸收和车队稳定行驶。Abstract: To improve the driving efficiency and traffic flow stability of vehicles in the mixed traffic environment, the informations such as the velocities and accelerations of multiple vehicles in front were fused, and an exponential smoothing approach was adopted to build a car-following model of connected and automated vehicles (CAVs) based on the backward-looking effect. Then the effects of number of vehicles in front and behind and the completeness of state information on the model stability were studied. The linear stability analysis was carried out and the optimal parameters of the model were determined by combining the Lyapunov's first method and linear harmonic perturbation method. Combined with the characteristics of mixed traffic environments, the car-following strategies of CAVs in different positions and states were proposed in the condition of communication information loss. The numerical simulations were carried out in three typical scenarios with different CAV penetration rates, including vehicle starting, vehicle braking to stop, and circular road. Research results show that in the scenario of vehicle braking to stop, the maximum stopping wave speed of all vehicles increases by 26.1%. In the scenario of vehicle starting, the maximum starting wave speed increases by 15.5%, and the accelerations and speeds of vehicles change more smoothly. In the circular road scenario, when the CAV penetration rate in the mixed traffic flow increases from 40% to 100%, the fluctuation time of average speed of vehicles in the larger disturbance scenario decreases by 44.8%, the wave peak decreases by 5.7%, and the wave trough increases by 19.4%, compared to the low CAV penetration rate scenarios. However, the proposed optimization strategy does not significantly improve the mixed traffic flow at a lower CAV penetration rate. Thus, in the current situation where it is difficult to construct an actual mixed traffic environment and conduct CAV real vehicle tests, the model and strategies can be employed for the car-following simulation and test verification in specific scenarios to effectively guarantee the absorption of traffic flow disturbance and stable driving vehicles in the mixed traffic environment.
-

图 4 不同CAV渗透率下的车辆减速度
Figure 4. Vehicle decelerations under different CAV penetration rates

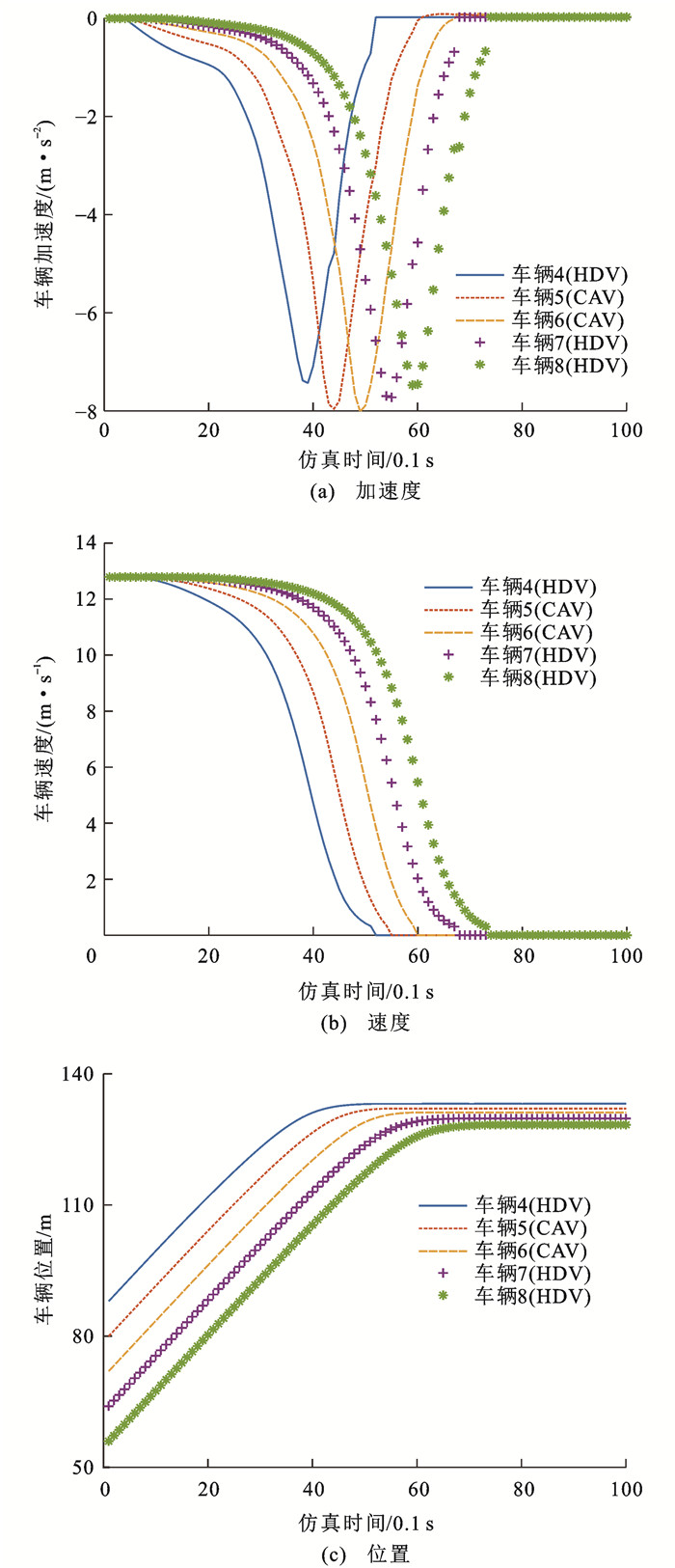
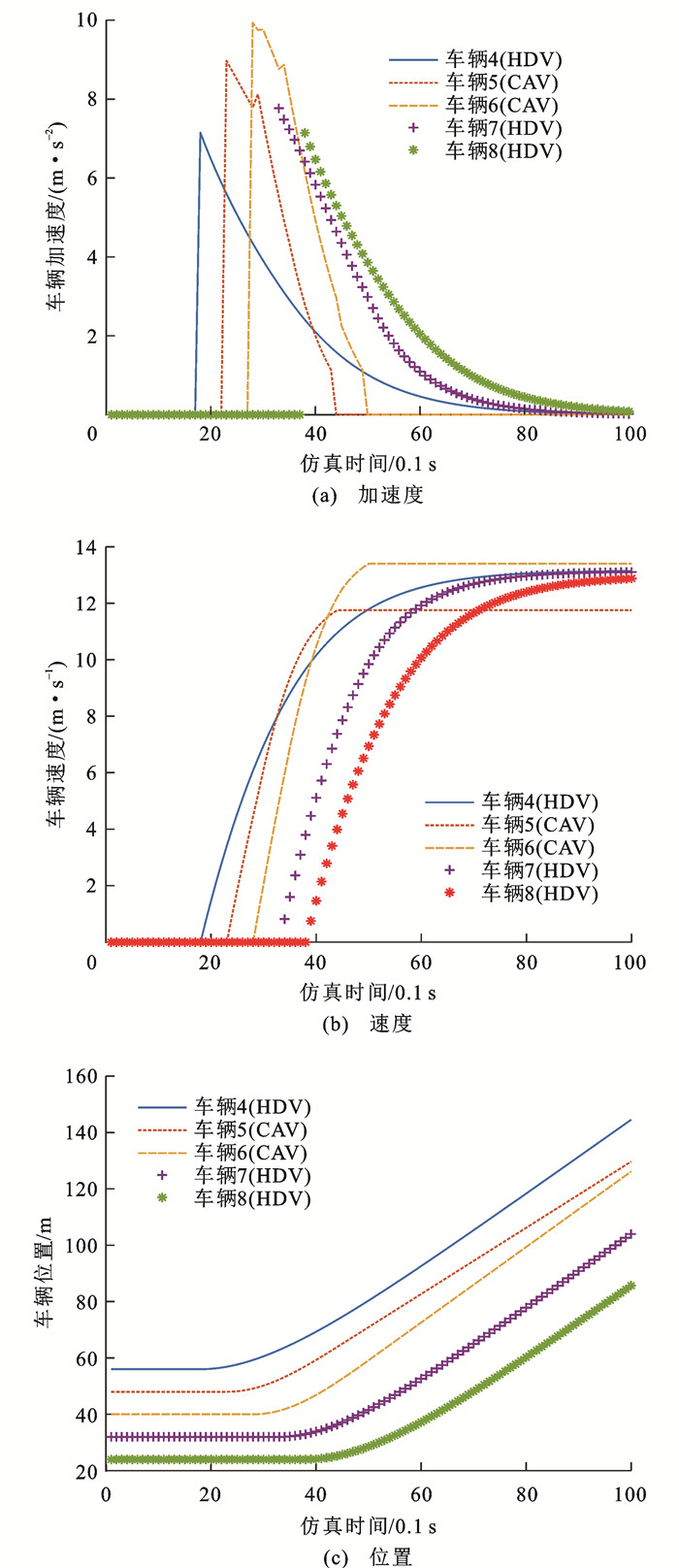
图 5 刹车减速过程中车辆参数变化
Figure 5. Changes in vehicle parameters during braking and deceleration

图 6 不同CAV渗透率下的车辆加速度
Figure 6. Vehicle accelerations under different CAV penetration rates

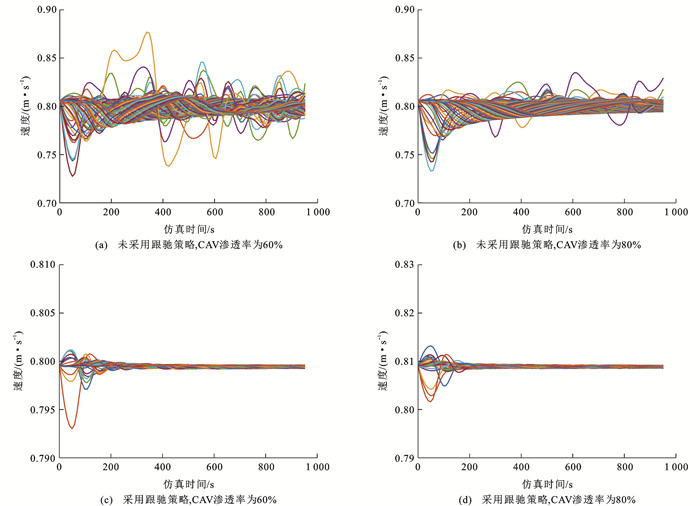
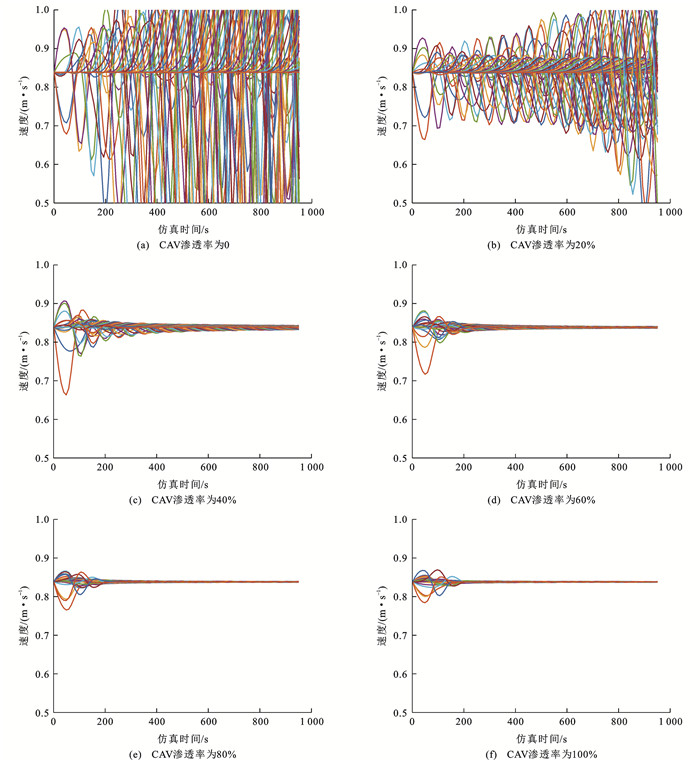
图 10 轻微速度扰动下的混合车流速度
Figure 10. Speeds of mixed traffic flow under slight speed disturbance

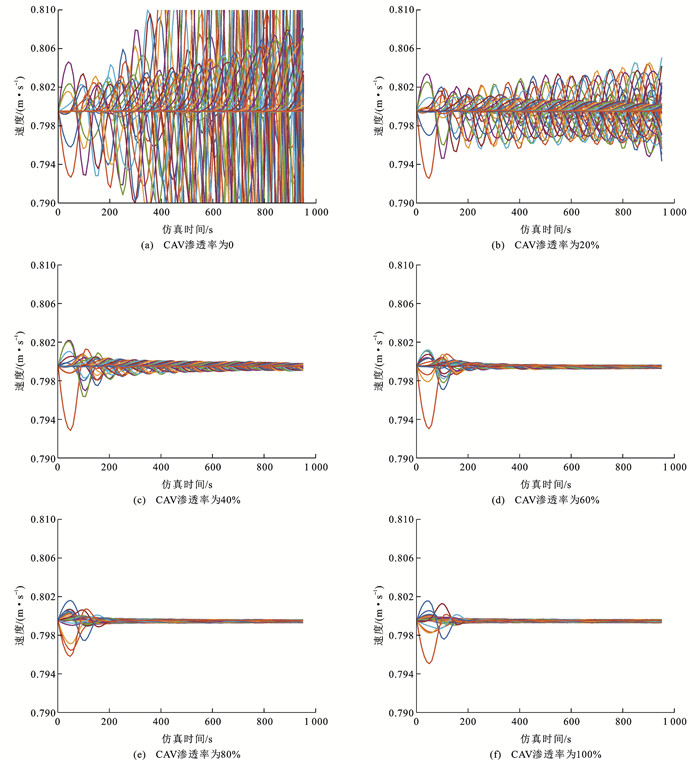
图 11 较大速度干扰下的混合车流速度
Figure 11. Speeds of mixed traffic flow under large speed disturbance
表 1 模型稳定性参数对比
Table 1. Comparison of model stability parameters
模型 Vmax/ (m·s-1) Vmin/ (m·s-1) Vave/ (m·s-1) Rup/ % Rdown/ % BLOVD 0.851 5 0.678 1 0.799 7 6.50 15.18 OVCM 1.080 1 0.892 7 0.999 5 8.05 10.69 MHOVA 1.042 8 0.892 7 0.999 7 4.32 10.69 MVCM 1.036 3 0.895 7 0.999 7 3.67 10.39 MVISF 0.826 2 0.750 5 0.799 6 3.33 6.13  下载: 导出CSV
下载: 导出CSV
表 2 不同CAV渗透率下刹车停止场景的参数对比
Table 2. Parameter comparison of braking to stop scenario under different CAV penetration rates
CAV渗透率/% 平均加速度/(m·s-2) 波速/(m·s-1) 0 -0.504 10.32 50 -0.532 11.37 100 -0.548 13.01
下载: 导出CSV
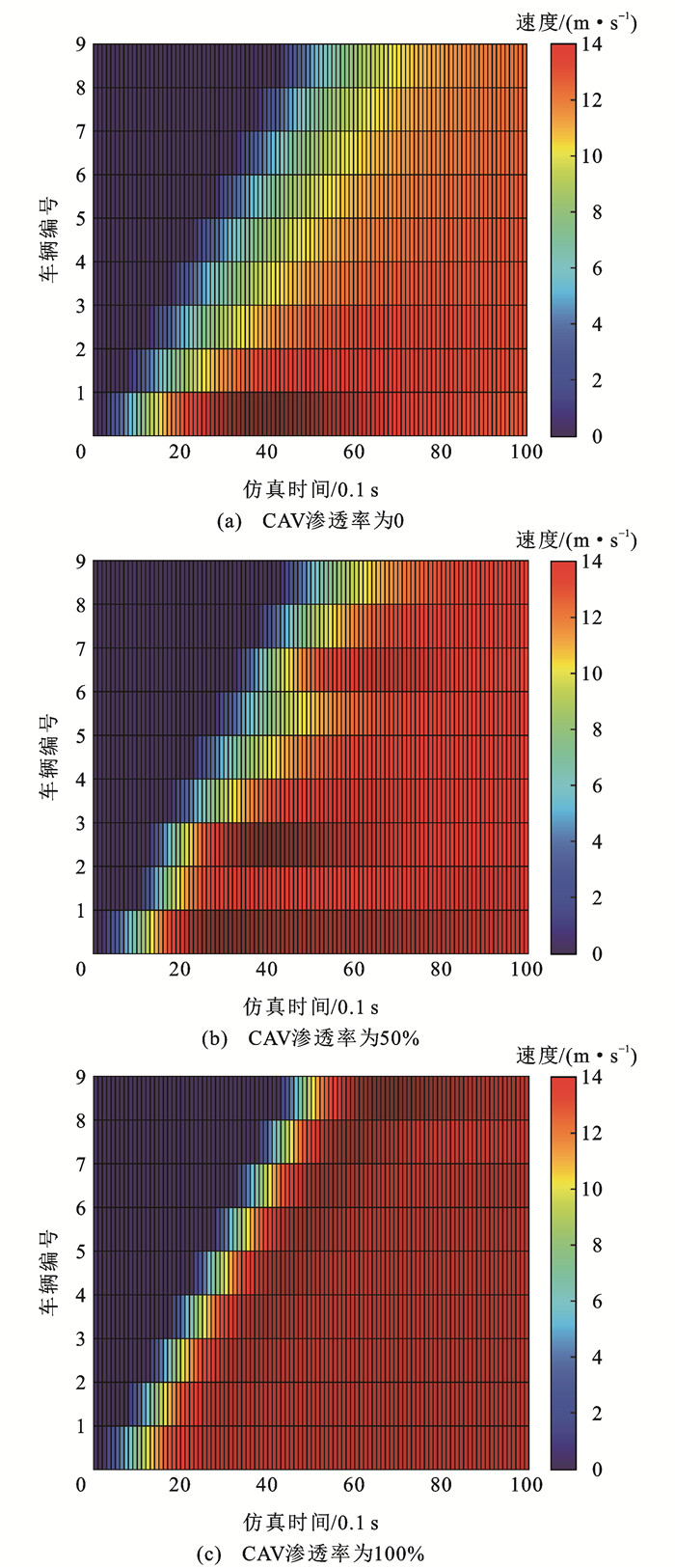
表 3 不同CAV渗透率下车辆启动场景的参数对比
Table 3. Comparison of parameters of vehicle starting scenario under different CAV penetration rates
CAV渗透率/% 平均加速度/(m·s-2) 波速/(m·s-1) 0 1.041 5.67 50 1.663 6.01 100 1.922 6.55
下载: 导出CSV
-
[1] 杨龙海, 张春, 仇晓赟, 等. 车辆跟驰模型研究进展[J]. 交通运输工程学报, 2019, 19(5): 125-138. doi: 10.3969/j.issn.1671-1637.2019.05.014YANG Long-hai, ZHANG Chun, QIU Xiao-yun, et al. Research progress on car-following models[J]. Journal of Traffic and Transportation Engineering, 2019, 19(5): 125-138. (in Chinese) doi: 10.3969/j.issn.1671-1637.2019.05.014 [2] 田野, 裴华鑫, 晏松, 等. 车路协同环境下行车风险场模型的扩展与应用[J]. 清华大学学报(自然科学版), 2022, 62(3): 447-457. doi: 10.16511/j.cnki.qhdxxb.2021.22.034TIAN Ye, PEI Hua-xin, YAN Song, et al. Extended driving risk field model for i-VICS and its application[J]. Journal of Tsinghua University (Science and Technology), 2022, 62(3): 447-457. (in Chinese) doi: 10.16511/j.cnki.qhdxxb.2021.22.034 [3] CHEN Dan-jue, SRIVASTAVA A, AHN S, et al. Traffic dynamics under speed disturbance in mixed traffic with automated and non-automated vehicles[J]. Transportation Research Part C: Emerging Technologies, 2020, 113: 293-313. doi: 10.1016/j.trc.2019.03.017 [4] NEWELL G F. Nonlinear effects in the dynamics of car following[J]. Operations Research, 1961, 9(2): 209-229. doi: 10.1287/opre.9.2.209 [5] BANDO M, HASEBE K, NAKAYAMA A, et al. Dynamical model of traffic congestion and numerical simulation[J]. Physical Review E, 1995, 51(2): 1035-1042. doi: 10.1103/PhysRevE.51.1035 [6] HELBING D, TILCH B. Generalized force model of traffic dynamics[J]. Physical Review E, 1998, 58(1): 133-138. doi: 10.1103/PhysRevE.58.133 [7] JIANG Rui, WU Qing-song, ZHU Zuo-jin. Full velocity difference model for a car-following theory[J]. Physical Review E, 2001, 64(1): 017101. doi: 10.1103/PhysRevE.64.017101 [8] 孙棣华, 张建厂, 廖孝勇, 等. 非邻近车辆最优速度差模型[J]. 交通运输工程学报, 2011, 11(6): 114-118. doi: 10.19818/j.cnki.1671-1637.2011.06.018SUN Di-hua, ZHANG Jian-chang, LIAO Xiao-yong, et al. Optimal velocity difference model of non-neighboring vehicles[J]. Journal of Traffic and Transportation Engineering, 2011, 11(6): 114-118. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2011.06.018 [9] 唐毅, 刘卫宁, 孙棣华, 等. 考虑前后车辆综合效应的跟驰模型及其稳定性分析[J]. 哈尔滨工业大学学报, 2014, 46(2): 115-120. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBX201402021.htmTANG Yi, LIU Wei-ning, SUN Di-hua, et al. A new car following model with considering the synergy effect of ahead-backward vehicles and its stability analysis[J]. Journal of Harbin Institute of Technology, 2014, 46(2): 115-120. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HEBX201402021.htm [10] PENG Guang-han, LU Wei-zhen, HE Hong-di, et al. Nonlinear analysis of a new car-following model accounting for the optimal velocity changes with memory[J]. Communications in Nonlinear Science and Numerical Simulation, 2016, 40: 197-205. doi: 10.1016/j.cnsns.2016.04.024 [11] 纪艺, 史昕, 赵祥模. 基于多前车信息融合的智能网联车辆跟驰模型[J]. 计算机应用, 2019, 39(12): 3685-3690. https://www.cnki.com.cn/Article/CJFDTOTAL-JSJY201912044.htmJI Yi, SHI Xin, ZHAO Xiang-mo. Car-following model for intelligent connected vehicles based on multiple headway information fusion[J]. Journal of Computer Applications, 2019, 39(12): 3685-3690. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSJY201912044.htm [12] WANG Shu-yi, YU Bin, WU Mi-yi. MVCM car-following model for connected vehicles and simulation-based traffic analysis in mixed traffic flow[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(6): 5267-5274. doi: 10.1109/TITS.2021.3052818 [13] 吴兵, 王文璇, 李林波, 等. 多前车影响的智能网联车辆纵向控制模型[J]. 交通运输工程学报, 2020, 20(2): 184-194. doi: 10.19818/j.cnki.1671-1637.2020.02.015WU Bing, WANG Wen-xuan, LI Lin-bo, et al. Longitudinal control model for connected autonomous vehicles influenced by multiple preceding vehicles[J]. Journal of Traffic and Transportation Engineering, 2020, 20(2): 184-194. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2020.02.015 [14] 宗芳, 石佩鑫, 王猛, 等. 考虑前后多车的网联自动驾驶车辆混流跟驰模型[J]. 中国公路学报, 2021, 34(7): 105-117. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL202107009.htmZONG Fang, SHI Pei-xin, WANG Meng, et al. Connected and automated vehicle mixed-traffic car-following model considering states of multiple front and rear vehicles[J]. China Journal of Highway and Transport, 2021, 34(7): 105-117. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL202107009.htm [15] 张毅, 姚丹亚, 李力, 等. 智能车路协同系统关键技术与应用[J]. 交通运输系统工程与信息, 2021, 21(5): 40-51. doi: 10.16097/j.cnki.1009-6744.2021.05.005ZHANG Yi, YAO Dan-ya, LI Li, et al. Technologies and applications for intelligent vehicle-infrastructure cooperation systems[J]. Journal of Transportation Systems Engineering and Information Technology, 2021, 21(5): 40-51. (in Chinese) doi: 10.16097/j.cnki.1009-6744.2021.05.005 [16] NGODUY D, LEE S, TREIBER M, et al. Langevin method for a continuous stochastic car-following model and its stability conditions[J]. Transportation Research Part C: Emerging Technologies, 2019, 105: 599-610. doi: 10.1016/j.trc.2019.06.005 [17] YUAN Zi-jian, WANG Tao, ZHANG Jing, et al. Influences of dynamic safe headway on car-following behavior[J]. Physica A: Statistical Mechanics and its Applications, 2022, 591: 126697. doi: 10.1016/j.physa.2021.126697 [18] ZHU Wen-xing, ZHANG Li-dong. A new car-following model for autonomous vehicles flow with mean expected velocity field[J]. Physica A: Statistical Mechanics and its Applications, 2018, 492: 2154-2165. doi: 10.1016/j.physa.2017.11.133 [19] MA Guang-yi, MA Ming-hui, LIANG Shi-dong, et al. Nonlinear analysis of the car-following model considering headway changes with memory and backward looking effect[J]. Physica A: Statistical Mechanics and its Applications, 2021, 562: 125303. doi: 10.1016/j.physa.2020.125303 [20] TANG Tie-qiao, GUI Yong, ZHANG Jian. ATAC-based car-following model for level 3 autonomous driving considering driver's acceptance[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(8): 10309-10321. doi: 10.1109/TITS.2021.3090974 [21] 秦严严, 王昊, 王炜, 等. 自适应巡航控制车辆跟驰模型综述[J]. 交通运输工程学报, 2017, 17(3): 121-130. doi: 10.3969/j.issn.1671-1637.2017.03.013QIN Yan-yan, WANG Hao, WANG Wei, et al. Review of car-following models of adaptive cruise control[J]. Journal of Traffic and Transportation Engineering, 2017, 17(3): 121-130. (in Chinese) doi: 10.3969/j.issn.1671-1637.2017.03.013 [22] MA Hua-qing, WU Hao, HU Yu-cong, et al. Multiple-factors aware car-following model for connected and autonomous vehicles[J]. Transportation Research Record, 2021, 2676(2): 649-662. [23] 安树科, 徐良杰, 钱良辉, 等. 考虑前方多车优化速度信息的车辆跟驰模型[J]. 东南大学学报(自然科学版), 2020, 50(6): 1156-1162. https://www.cnki.com.cn/Article/CJFDTOTAL-DNDX202006024.htmAN Shu-ke, XU Liang-jie, QIAN Liang-hui, et al. Car-following model with optimal velocity information of multiple-vehicle ahead[J]. Journal of Southeast University (Natural Science Edition), 2020, 50(6): 1156-1162. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DNDX202006024.htm [24] WEI Chong-feng, PASCHALIDIS E, MERAT N, et al. Human-like decision making and motion control for smooth and natural car following[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8(1): 263-274. doi: 10.1109/TIV.2021.3098184 [25] 杜煜, 上官伟, 柴琳果, 等. 信号交叉口基于出发时刻预测的生态驾驶方法[J]. 中国公路学报, 2022, 35(6): 277-288. doi: 10.19721/j.cnki.1001-7372.2022.06.023DU Yu, SHANGGUAN Wei, CHAI Lin-guo, et al. Departure time prediction based eco-driving method of signalized intersection[J]. China Journal of Highway and Transport, 2022, 35(6): 277-288. (in Chinese) doi: 10.19721/j.cnki.1001-7372.2022.06.023 [26] ZHU Wen-xing, ZHANG H M. Analysis of mixed traffic flow with human-driving and autonomous cars based on car-following model[J]. Physica A: Statistical Mechanics and its Applications, 2018, 496: 274-285. doi: 10.1016/j.physa.2017.12.103 [27] PENG Jia-li, SHANGGUAN Wei, CHAI Lin-guo. Strategy of lane-changing coupling process for connected and automated vehicles in mixed traffic environment[J]. Transportmetrica B: Transport Dynamics, 2023, 11(1): 979-995. doi: 10.1080/21680566.2022.2154288 [28] 秦严严, 张健, 陈凌志, 等. 手动-自动驾驶混合交通流元胞传输模型[J]. 交通运输工程学报, 2020, 20(2): 229-238. doi: 10.19818/j.cnki.1671-1637.2020.02.019QIN Yan-yan, ZHANG Jian, CHEN Ling-zhi, et al. Cell transmission model of mixed traffic flow of manual-automated driving[J]. Journal of Traffic and Transportation Engineering, 2020, 20(2): 229-238. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2020.02.019 [29] PENG Jia-li, SHANGGUAN Wei, ZHANG Lu, et al. An optimal scheduling method using multi-agent a for autonomous shuttle bus[C]//IEEE. 2021 40th Chinese Control Conference. New York: IEEE, 2021: 6040-6045. [30] 李永福, 何昌鹏, 朱浩, 等. 通信延时环境下异质网联车辆队列非线性纵向控制[J]. 自动化学报, 2021, 47(12): 2841-2856. doi: 10.16383/j.aas.c190442LI Yong-fu, HE Chang-peng, ZHU Hao, et al. Nonlinear longitudinal control for heterogeneous connected vehicle platoon in the presence of communication delays[J]. Acta Automatica Sinica, 2021, 47(12): 2841-2856. (in Chinese) doi: 10.16383/j.aas.c190442 [31] 彭勇, 沙晓宇, 刘世洁, 等. 基于PFV策略的连续型元胞自动机交通流模型[J]. 交通运输系统工程与信息, 2019, 19(3): 75-80. doi: 10.16097/j.cnki.1009-6744.2019.03.012PENG Yong, SHA Xiao-yu, LIU Shi-jie, et al. Continuous cellular automaton traffic flow model based on PFV strategy[J]. Journal of Transportation Systems Engineering and Information Technology, 2019, 19(3): 75-80. (in Chinese) doi: 10.16097/j.cnki.1009-6744.2019.03.012 [32] 姚志洪, 金玉婷, 王思琛, 等. 混入智能网联汽车的交通流稳定性与安全性分析[J]. 中国安全科学学报, 2021, 31(10): 136-143. doi: 10.16265/j.cnki.issn1003-3033.2021.10.019YAO Zhi-hong, JIN Yu-ting, WANG Si-chen, et al. Stability and safety analysis on traffic flow mixed with ICV[J]. China Safety Science Journal, 2021, 31(10): 136-143. (in Chinese) doi: 10.16265/j.cnki.issn1003-3033.2021.10.019 [33] 秦严严, 王昊, 王炜. 网联辅助驾驶混合交通流稳定性及安全性分析[J]. 东南大学学报(自然科学版), 2018, 48(1): 188-194. https://www.cnki.com.cn/Article/CJFDTOTAL-DNDX201801029.htmQIN Yan-yan, WANG Hao, WANG Wei. Analysis on stability and safety for mixed traffic flow with connected auxiliary driving[J]. Journal of Southeast University (Natural Science Edition), 2018, 48(1): 188-194. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DNDX201801029.htm [34] 李霞, 汪一戈, 崔洪军, 等. 智能网联环境下复杂异质交通流稳定性解析[J]. 交通运输系统工程与信息, 2020, 20(6): 114-120. doi: 10.16097/j.cnki.1009-6744.2020.06.015LI Xia, WANG Yi-ge, CUI Hong-jun, et al. Stability analysis of complex heterogeneous traffic flow under connected and autonomous environment[J]. Journal of Transportation Systems Engineering and Information Technology, 2020, 20(6): 114-120. (in Chinese) doi: 10.16097/j.cnki.1009-6744.2020.06.015 [35] YU Hai-yang, JIANG Rui, HE Zheng-bing, et al. Automated vehicle-involved traffic flow studies: a survey of assumptions, models, speculations, and perspectives[J]. Transportation Research Part C: Emerging Technologies, 2021, 127: 103101. doi: 10.1016/j.trc.2021.103101 [36] MIN Hai-gen, FANG Yu-kun, WU Xia, et al. On-ramp merging strategy for connected and automated vehicles based on complete information static game[J]. Journal of Traffic and Transportation Engineering (English Edition), 2021, 8(4): 582-595. doi: 10.1016/j.jtte.2021.07.003 -


 点击查看大图
点击查看大图
计量
- 文章访问数: 1393
- HTML全文浏览量: 831
- PDF下载量: 329
- 被引次数: 0
