

Reciprocal velocity obstacle algorithm for collision risk avoidance of intelligent connected vehicles
-
摘要: 针对多智能车辆协同驾驶中的动态避碰问题,构建了一种面向智能网联车辆碰撞风险检测与协同避碰路径规划的互动速度障碍算法;基于人工势场理论构建了车辆碰撞风险势场,量化了车辆碰撞风险强度与碰撞风险区域;基于车辆驾驶行为交互作用构建了互动速度障碍算法,确定了冲突车辆碰撞风险的协同规避条件与规则;基于车辆动力学约束构建了动态窗口法,确定了碰撞风险规避可行速度解集;基于模型预测控制原理,应用最优化理论构建了车辆碰撞风险规避路径规划模型;通过构建智能网联环境下单冲突车辆、多冲突车辆、瓶颈区冲突车流避碰仿真场景,测试了提出的碰撞风险规避算法的有效性,并与其他避碰算法进行了控制效果对比。研究结果表明:相较于其他对比算法,互动速度障碍算法控制下的安全性能提升了8.6%以上,效率性能提升了9.6%以上,说明提出的互动速度障碍算法通过协同冲突车辆的避碰行为可有效降低冲突车辆避碰速度与轨迹波动,可有效规避非线性速度与轨迹冲突车辆间的碰撞冲突,并可避免瓶颈区多车辆碰撞事故与明显车流波动;在瓶颈区大范围车辆冲突中,相较于其他避碰算法,提出的避碰算法可使车辆的通行效率提升10.42%,使车辆的碰撞风险降低47.32%。由此可见,该算法在协同大规模冲突车辆的避碰行为、降低车辆碰撞风险与运行延误上具有良好性能。Abstract: A reciprocal velocity obstacle (RVO) algorithm for collision risk detection and collaborative path planning for collision avoidance of intelligent connected vehicles was constructed to address the dynamic collision avoidance in the collaborative driving among multiple intelligent vehicles. Based on the artificial potential field (APF) theory, a vehicle collision risk potential field (CRPF) was built to quantify both the collision risk intensity and risk area. According to the interactive effect of vehicle driving behavior, an RVO algorithm was constructed to determine the conditions and rules for collaborative collision risk avoidance among conflicting vehicles. Based on the vehicle dynamics constraints, a dynamic window approach was established to identify the feasible velocity solution set for collision risk avoidance. Based on the principle of model predictive control, the optimization theory was employed to build a path planning model for the vehicle collision risk avoidance. The effectiveness of the proposed collision risk avoidance algorithm was tested and compared with other collision avoidance algorithms by constructing the collision avoidance simulation scenarios for the single conflicting vehicle, multiple conflicting vehicles, and conflicting traffic flow in bottleneck areas under an intelligent connected environment. Research results show that compared to other comparative algorithms, the security performance and efficiency performance of the RVO algorithm improves by more than 8.6% and 9.6%, respectively, indicating that the proposed RVO algorithm can effectively reduce the collision avoidance velocity and trajectory fluctuations for conflicting vehicles via the collaborative collision avoidance behavior, effectively avoid the collision conflicts among vehicles with nonlinear speeds and trajectories and mitigates the multiple vehicle collisions and significant traffic flow fluctuations in bottleneck areas. The proposed collision avoidance algorithm outperforms other algorithms in bottleneck areas with large-scale vehicle conflicts, enhancing the vehicle traffic efficiency by 10.42% and reducing the vehicle collision risk by 47.32%. Thus, the algorithm has sound performance in coordinating the collision avoidance behavior of large-scale conflict vehicles and reducing the vehicle collision risks and operation delays. 2 tabs, 20 figs, 41 refs.
-

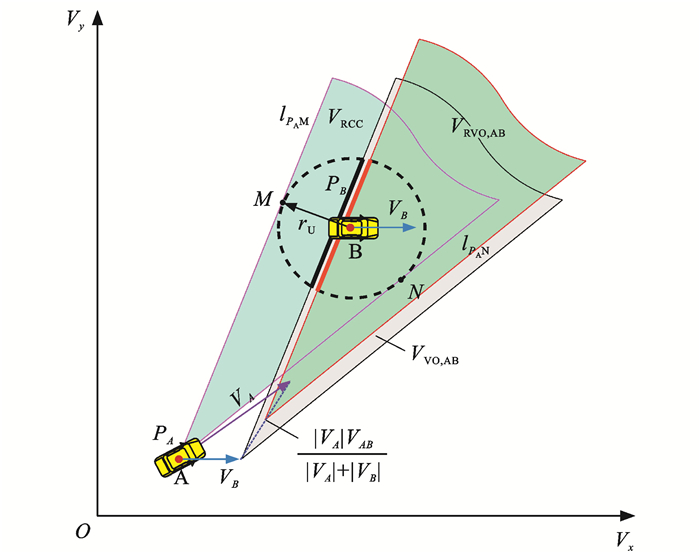
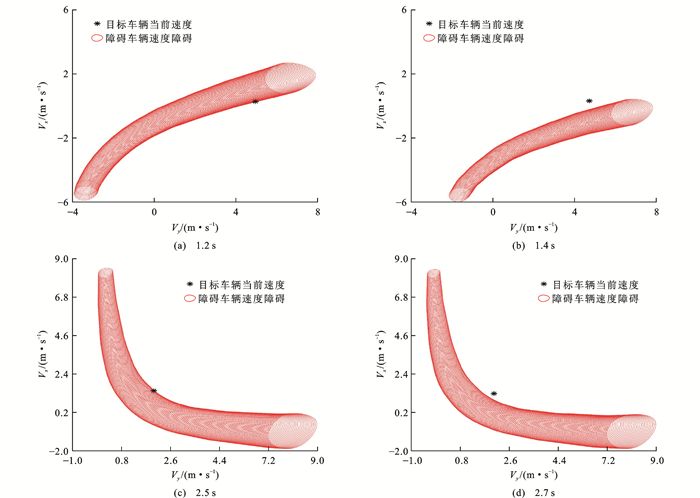
图 5 多等级碰撞风险强度下的速度障碍分布
Figure 5. VO distributions under multi-level collision risk strengths

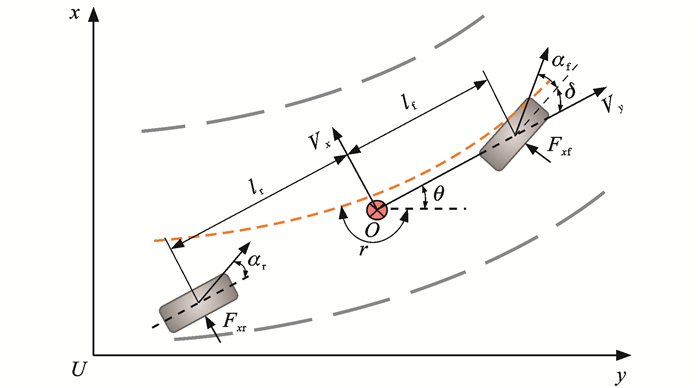
图 7 基于动态窗口法的车辆动力学约束
Figure 7. Vehicle dynamic constraints based on dynamic window approach

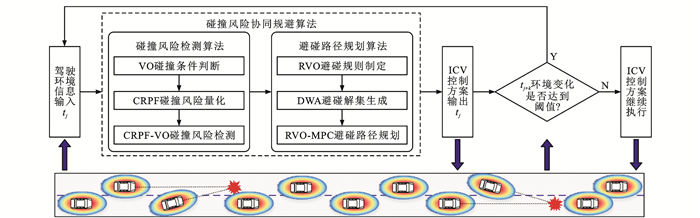
图 9 基于MPC的避碰路径规划仿真框架
Figure 9. Simulation framework of MPC-based collision avoidance path planning

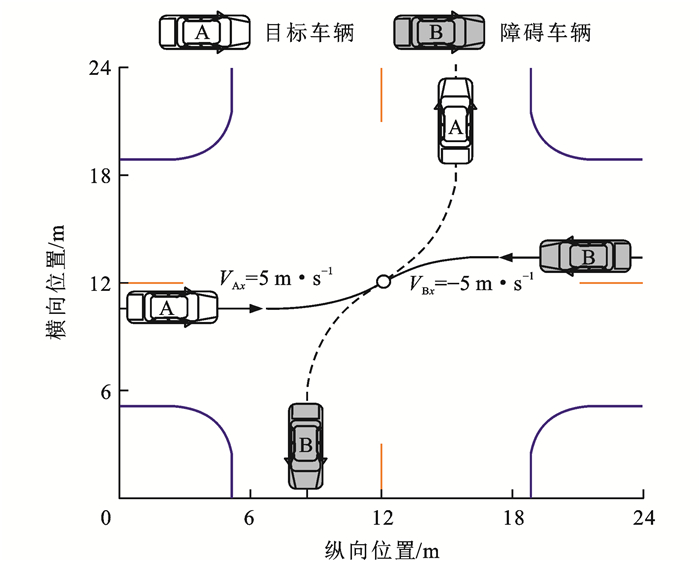
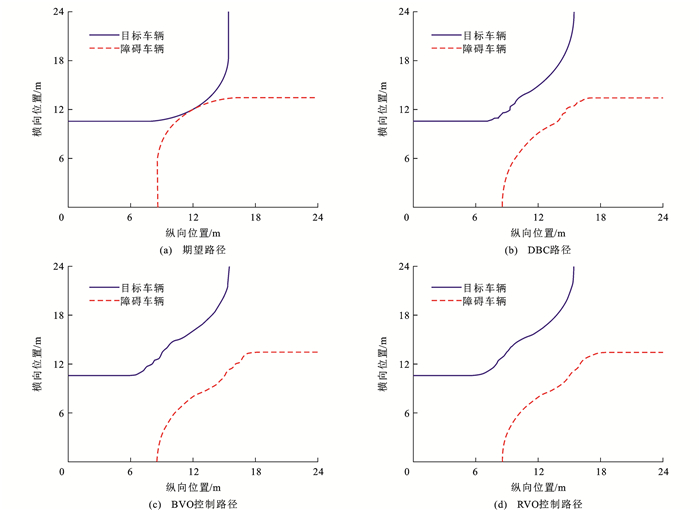
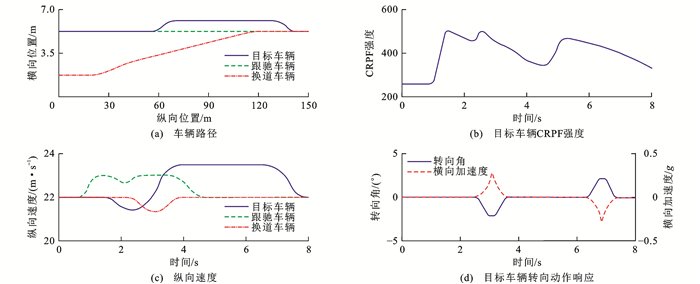
图 13 不同算法控制下车辆行驶路径
Figure 13. Driving paths of vehicles controlled by different algorithms

图 17 RVO控制下多车辆碰撞规避过程
Figure 17. Multi-vehicle collision avoidance process under RVO control

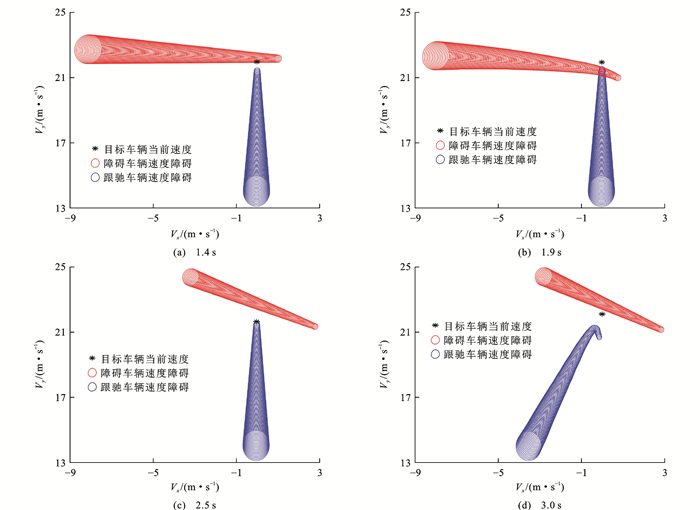
图 18 RVO控制下多车辆冲突速度障碍
Figure 18. Multi-vehicle collision avoidance velocity obstacles under RVO control

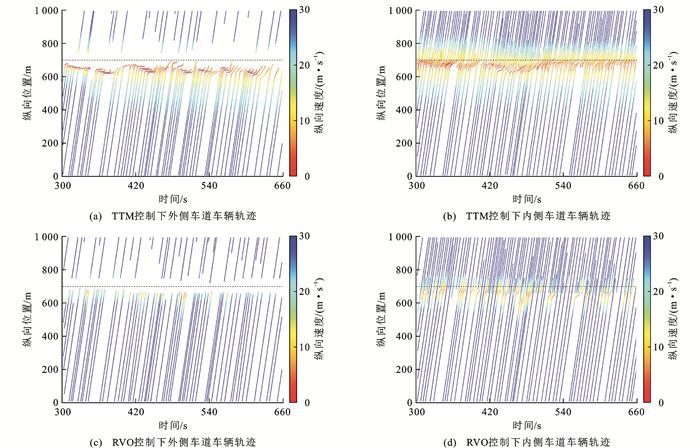
图 19 不同算法控制下大规模冲突车辆轨迹
Figure 19. Vehicle trajectories of large-scale collision controlled by different algorithms

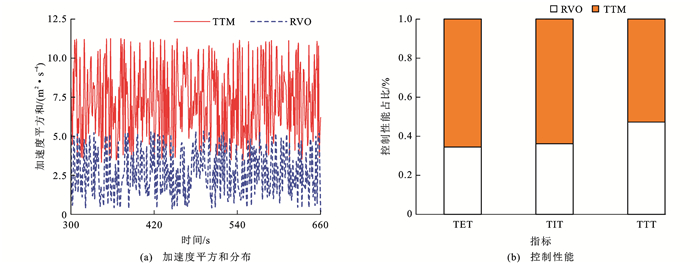
图 20 不同算法控制下大规模冲突规避效果
Figure 20. Large-scale collision avoidance effects controlled by different algorithms
表 1 仿真模型标定参数
Table 1. Calibrated parameters of simulation model
参数 取值 参数 取值 参数 取值 参数 取值 IZ/(kg·m2) 4 600 最小加速度$\dot{V}_{\mathrm{a}, \min }$/(m·s-2) 1.0 Cf/N 127 000 NP 20 FxT_max/N 20 000 最大减速度$\dot{V}_{\mathrm{d}, \max }$/(m·s-2) 4.8 h/m 0.647 Nc 5 Fyf0_max/N 10 400 舒速加速度$\dot{V}_{\mathrm{a, com}}$/(m·s-2) 1.4 W/kg 2 270 TCRPF 500 Fyr0_max/N 10 600 $\dot{\theta}_{\mathrm{a}}$/(°) 1.0 lf/m 1.421 G 0.5 Umax/(N·m) 3 000 $\dot{\theta}_{\mathrm{d}}$/(°) -1.0 lr/m 1.434 K 5 道路条件对碰撞风险的影响系数 1 μ 0.9 车辆类型对碰撞风险的影响系数 1 ζ 1.2  下载: 导出CSV
下载: 导出CSV
表 2 BVO、DBC和RVO算法的控制效果对比
Table 2. Control effect comparison among BVO, DBC and RVO algorithms
检测时间/s 1.00 1.20 1.40 1.60 1.80 2.00 2.20 2.40 2.60 2.80 3.00 3.20 3.40 TTC/s BVO 3.35 3.44 3.73 4.12 3.55 3.83 3.61 3.28 4.06 3.52 3.33 3.54 3.85 DBC 3.35 3.23 3.57 3.10 2.86 3.04 2.92 2.75 2.30 2.69 3.42 3.07 2.81 RVO 3.61 3.76 3.94 4.51 4.15 3.99 3.83 3.78 4.14 3.78 3.79 3.88 4.11 DDP/m BVO 0.25 0.87 1.57 2.19 2.67 3.12 3.49 3.76 4.04 4.22 4.29 4.25 4.35 DBC 0.38 0.97 1.72 2.36 2.96 3.48 3.94 4.37 4.71 5.03 5.32 5.49 5.70 RVO 0.12 0.76 1.32 1.89 2.36 2.84 3.11 3.44 3.70 3.86 3.90 3.93 4.07
下载: 导出CSV
-
[1] 郭延永, 刘佩, 袁泉, 等. 网联自动驾驶道路交通安全研究综述[J/OL]. 交通运输工程学报, 2023, https://kns.cnki.net/kcms2/detail/61.1369.U.20230711.1151.002.html .GUO Yan-yong, LIU Pei, YUAN Quan, et al. Review of research on road traffic safety of connected and automated vehicles[J/OL]. Journal of Traffic and Transportation Engineering, 2023,https://kns.cnki.net/kcms2/detail/61.1369.U.20230711.1151.002.html . (in Chinese)[2] GUO Yan-yong, SAYED T, ZHENG Lai. A hierarchical Bayesian peak over threshold approach for conflict-based before-after safety evaluation of leading pedestrian intervals[J]. Accident Analysis and Prevention, 2020, 147: 105772. doi: 10.1016/j.aap.2020.105772 [3] 郭延永, 刘攀, 吴瑶, 等. 基于交通冲突模型的信号交叉口渠化岛设置方法[J]. 交通运输工程学报, 2017, 17(4): 140-148. doi: 10.3969/j.issn.1671-1637.2017.04.015GUO Yan-yong, LIU Pan, WU Yao, et al. Design approach of channelized island based on traffic conflict models at signalized intersection[J]. Journal of Traffic and Transportation Engineering, 2017, 17(4): 140-148. (in Chinese) doi: 10.3969/j.issn.1671-1637.2017.04.015 [4] 杨敏, 王立超, 张健, 等. 面向智慧高速的合流区协作车辆冲突解脱协调方法[J]. 交通运输工程学报, 2020, 20(3): 217-224. doi: 10.19818/j.cnki.1671-1637.2020.03.020YANG Min, WANG Li-chao, ZHANG Jian, et al. Collaborative method of vehicle conflict resolution in merging area for intelligent expressway[J]. Journal of Traffic and Transportation Engineering, 2020, 20(3): 217-224. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2020.03.020 [5] 王建强, 郑讯佳, 黄荷叶. 驾驶人驾驶决策机制遵循最小作用量原理[J]. 中国公路学报, 2020, 33(4): 155-168. doi: 10.3969/j.issn.1001-7372.2020.04.016WANG Jian-qiang, ZHENG Xun-jia, HUANG He-ye. Decision-making mechanism of the drivers following the principle of least action[J]. China Journal of Highway and Transport, 2020, 33(4): 155-168. (in Chinese) doi: 10.3969/j.issn.1001-7372.2020.04.016 [6] ALBAKER B M, RAHIM N A. Unmanned aircraft collision detection and resolution: concept and survey[C]//IEEE. 20105th IEEE Conference on Industrial Electronics and Applications. New York: IEEE, 2010: 248-253. [7] VELASCO M G A, BORST C, ELLERBROEK J, et al. The use of intent information in conflict detection and resolution models based on dynamic velocity obstacles[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4): 2297-2302. doi: 10.1109/TITS.2014.2376031 [8] FIORINI P, SHILLER Z. Motion planning in dynamic environments using velocity obstacles[J]. The International Journal of Robotics Research, 1998, 17(7): 760-772. doi: 10.1177/027836499801700706 [9] WILKIE D, VAN DEN BERG J, MANOCHA D. Generalized velocity obstacles[C]//IEEE. 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems. New York: IEEE, 2009: 5573-5578. [10] 盛鹏程, 曾小松, 罗新闻, 等. 基于贝叶斯概率估计的智能电动车动态目标避障算法[J]. 中国公路学报, 2019, 32(6): 96-104. doi: 10.19721/j.cnki.1001-7372.2019.06.010SHENG Peng-cheng, ZENG Xiao-song, LUO Xin-wen, et al. Multi-objective dynamic obstacle avoidance algorithm of intelligent electric vehicles based on Bayesian theory[J]. China Journal of Highway and Transport, 2019, 32(6): 96-104. (in Chinese) doi: 10.19721/j.cnki.1001-7372.2019.06.010 [11] LIU Zhi-xian, YUAN Xiao-fang, HUANG Guo-ming, et al. Two potential fields fused adaptive path planning system for autonomous vehicle under different velocities[J]. ISA Transactions, 2021, 112: 176-185. doi: 10.1016/j.isatra.2020.12.015 [12] WANG Shao-bo, ZHANG Ying-jun, LI Lian-bo. A collision avoidance decision-making system for autonomous ship based on modified velocity obstacle method[J]. Ocean Engineering, 2020, 215: 107910. doi: 10.1016/j.oceaneng.2020.107910 [13] CHEN Peng-fei, HUANG Ya-min, PAPADIMITRIOU E, et al. An improved time discretized non-linear velocity obstacle method for multi-ship encounter detection[J]. Ocean Engineering, 2020, 196: 106718. doi: 10.1016/j.oceaneng.2019.106718 [14] YANG Xiu-xia, ZHANG Yi, ZHOU Wei-wei. Obstacle avoidance method of three-dimensional obstacle spherical cap[J]. Journal of Systems Engineering and Electronics, 2018, 29(5): 1058-1068. doi: 10.21629/JSEE.2018.05.16 [15] SEO J, KIM Y, KIM S, et al. Collision avoidance strategies for unmanned aerial vehicles in formation flight[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(6): 2718-2734. doi: 10.1109/TAES.2017.2714898 [16] HAN Rui-hua, CHEN Sheng-duo, WANG Shuai-jun, et al. Reinforcement learned distributed multi-robot navigation with reciprocal velocity obstacle shaped rewards[J]. IEEE Robotics and Automation Letters, 2022, 7(3): 5896-5903. doi: 10.1109/LRA.2022.3161699 [17] XIE Zhan-teng, DAMES P. DRL-VO: earning to navigate through crowded dynamic scenes using velocity obstacles[J]. IEEE Transactions on Robotics, 2023, 39(4): 2700-2719. doi: 10.1109/TRO.2023.3257549 [18] HUANG Ji-hao, ZENG Jun, CHI Xue-min, et al. Velocity obstacle for polytopic collision avoidance for distributed multi-robot systems[J]. IEEE Robotics and Automation Letters, 2023, 8(6): 3502-3509. doi: 10.1109/LRA.2023.3269295 [19] WAKABAYASHI T, SUZUKI Y, SUZUKI S. Dynamic obstacle avoidance for multi-rotor UAV using chance-constraints based on obstacle velocity[J]. Robotics and Autonomous Systems, 2023, 160: 104320. doi: 10.1016/j.robot.2022.104320 [20] ALONSO-MORA J, BEARDSLEY P, SIEGWART R. Cooperative collision avoidance for nonholonomic robots[J]. IEEE Transactions on Robotics, 2018, 34(2): 404-420. doi: 10.1109/TRO.2018.2793890 [21] BAREISS D, BERG J. Generalized reciprocal collision avoidance[J]. International Journal of Robotics Research, 2015, 34(2): 1501-1514. [22] 陈海璐. 基于粒子群算法和速度障碍法的无人机避险方法研究[D]. 石家庄: 河北科技大学, 2020.CHEN Hai-lu. Research on the method of UAV avoidance based on particle swarm optimization and velocity obstacle[D]. Shijiazhuang: Hebei University of Science and Technology, 2020. (in Chinese) [23] ZHU Xiao-min, YI Jian-jun, DING Hong-kai, et al. Velocity obstacle based on vertical ellipse for multi-robot collision avoidance[J]. Journal of Intelligent and Robotic Systems, 2020, 99(1): 183-208. doi: 10.1007/s10846-019-01127-6 [24] 彭威. 基于社会力的椭圆行人动力学模型[D]. 南京: 南京大学, 2016.PENG Wei. Elliptical pedestrian model based on social force[D]. Nanjing: Nanjing University, 2016. (in Chinese) [25] LI Lin-heng, GAN Jing, YI Zi-wei, et al. Risk perception and the warning strategy based on safety potential field theory[J]. Accident Analysis and Prevention, 2020, 148: 105805. doi: 10.1016/j.aap.2020.105805 [26] LU Bing, LI Guo-fa, YU Hui-long, et al. Adaptive potential field-based path planning for complex autonomous driving scenarios[J]. IEEE Access, 2020, 8: 225294-225305. doi: 10.1109/ACCESS.2020.3044909 [27] LI Lin-heng, GAN Jing, JI Xin-kai, et al. Dynamic driving risk potential field model under the connected and automated vehicles environment and its application in car-following modeling[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(1): 122-141. doi: 10.1109/TITS.2020.3008284 [28] VAN DENBERG J, LIN Ming, MANOCHA D. Reciprocal velocity obstacles for real-time multi-agent navigation[C]//IEEE. 2008 IEEE International Conference on Robotics and Automation. New York: IEEE, 2008: 1928-1935. [29] CHEN Peng-fei, HUANG Ya-min, PAPADIMITRIOU E, et al. Global path planning for autonomous ship: a hybrid approach of fast marching square and velocity obstacles methods[J]. Ocean Engineering, 2020, 214: 107793. doi: 10.1016/j.oceaneng.2020.107793 [30] WANG Shun-chao, LI Zhi-bin, WANG Bing-tong, et al. Velocity obstacle-based collision avoidance and motion planning framework for connected and automated vehicles[J]. Transportation Research Record, 2022, 2676(5): 748-766. doi: 10.1177/03611981211070286 [31] ZHONG Xun-yu, PENG Xia-fu, ZHOU Jie-hua. Dynamic collision avoidance of mobile robot based on velocity obstacles[C]//IEEE. Proceedings of 2011 International Conference on Transportation, Mechanical, and Electrical Engineering (TMEE). New York: IEEE, 2011: 2410-2413. [32] LI Bo-yuan, DU Hai-ping, LI Wei-hua. A potential field approach-based trajectory control for autonomous electric vehicles with in-wheel motors[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(8): 2044-2055. doi: 10.1109/TITS.2016.2632710 [33] HUANG Zi-chao, CHU Duan-feng, WU Chao-zhong, et al. Path planning and cooperative control for automated vehicle platoon using hybrid automata[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(3): 959-974. doi: 10.1109/TITS.2018.2841967 [34] YI Zi-wei, LI Lin-heng, QU Xu, et al. Using artificial potential field theory for a cooperative control model in a connected and automated vehicles environment[J]. Transportation Research Record, 2020, 2674(9): 1005-1018. doi: 10.1177/0361198120933271 [35] WANG Jian-qiang, WU Jian, ZHENG Xun-jia, et al. Driving safety field theory modeling and its application in pre-collision warning system[J]. Transportation Research Part C: Emerging Technologies, 2016, 72: 306-324. doi: 10.1016/j.trc.2016.10.003 [36] WANG Jian-qiang, WU Jian, LI Yang. The driving safety field based on driver-vehicle-road interactions[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4): 2203-2214. doi: 10.1109/TITS.2015.2401837 [37] SEDER M, PETROVI AC'G I. Dynamic window based approach to mobile robot motion control in the presence of moving obstacles[C]//IEEE. Proceedings of 2007 IEEE International Conference on Robotics and Automation. New York: IEEE, 2007: 1986-1991. [38] ZHOU Jian, ZHENG Hong-yu, WANG Jun-min, et al. Multiobjective optimization of lane-changing strategy for intelligent vehicles in complex driving environments[J]. IEEE Transactions on Vehicular Technology, 2020, 69(2): 1291-1308. doi: 10.1109/TVT.2019.2956504 [39] WANG Shun-chao, LI Zhi-bin, CAO Ze-hong, et al. Jam-absorption driving strategy for improving safety near oscillations in connected vehicle environment considering consequential jams [J]. IEEE Intelligent Transportation Systems Magazine, 2022, 14(2): 41-52. doi: 10.1109/MITS.2021.3050889 [40] 盛鹏程, 罗新闻, 李景蒲, 等. 智能电动车弯曲道路场景中的避障路径规划[J]. 交通运输工程学报, 2020, 20(2): 195-204. doi: 10.19818/j.cnki.1671-1637.2020.02.016SHENG Peng-cheng, LUO Xin-wen, LI Jing-pu, et al. Obstacle avoidance path planning of intelligent electric vehicles in winding road scene[J]. Journal of Traffic and Transportation Engineering, 2020, 20(2): 195-204. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2020.02.016 [41] 王顺超, 李志斌, 吴瑶, 等. 面向瓶颈多簇运动波消除的拥堵吸收智能驾驶模型[J]. 中国公路学报, 2022, 35(1): 137-150. doi: 10.3969/j.issn.1001-7372.2022.01.012WANG Shun-chao, LI Zhi-bin, WU Yao, et al. An intelligent jam-absorbing driving strategy for eliminating multiple traffic oscillations at bottlenecks[J]. China Journal of Highway and Transport, 2022, 35(1): 137-150. (in Chinese) doi: 10.3969/j.issn.1001-7372.2022.01.012 -



 点击查看大图
点击查看大图
计量
- 文章访问数: 588
- HTML全文浏览量: 154
- PDF下载量: 121
- 被引次数: 0
