

Research progress in testing and evaluation technologies for autonomous driving
-
摘要: 针对实际复杂交通运行环境中自动驾驶车辆整车级测试成本高、周期长、覆盖度低、缺乏完善工具链等难题,分析了自动驾驶测试与评价技术7大领域的研究现状,展望了未来发展方向,具体涵盖了自动驾驶车辆仿真测试技术、交通流仿真测试技术、硬件在环测试技术、场地测试技术、智能性评价技术、测试评价工具链与体系构建、认证与潜在缺陷检测技术等。在自动驾驶车辆仿真测试方面,分析了自动驾驶仿真测试软件、车辆动力学模型、测试背景车交互行为模型、云控平台监管的仿真测试与车辆仿真系统标准化的研究现状,总结了自动驾驶车辆仿真测试目前存在的主要问题;在自动驾驶交通流仿真测试方面,总结了测试背景车驾驶风格模型、交通流建模与仿真、交通场景生成方法和加速测试方法的研究现状,展望了自动驾驶交通流仿真测试的未来发展趋势;在硬件在环测试技术方面,总结了人-车-路-环多维数字孪生测试和自动驾驶车辆整车级系统平台构建方法,概述了高清摄像头、毫米波雷达、超声波雷达等典型传感器数据与车车/车路通信信号的模拟技术;在场地测试技术方面,综述了封闭场地测试、开放道路测试与高速公路测试相关测试场、测试标准和关键技术的发展现状;在智能性评价技术方面,从自动驾驶智能性概念、场景复杂度量化和评估、自动驾驶智能性评价体系与社会合作性评价方法四方面介绍自动驾驶智能性评价方法的研究现状;在测试评价工具链与体系构建方面,主要从测试评价工具链技术、自动驾驶测试评价体系、自动驾驶测试标准现状三方面介绍了自动驾驶测试评价标准体系现状;在认证与潜在缺陷检测技术方面,从自动驾驶缺陷的定义、致因分析、缺陷分类、缺陷检测等方面综述了目前自动驾驶的缺陷检测方法,总结了自动驾驶车辆安全保障面临的挑战。研究结果表明: 自动驾驶测试评价技术虽已取得较大进展,但测试评价标准体系仍不完善,现有测试工具与方法难以满足L3级及以上自动驾驶车辆测试需求;虚拟仿真与数字孪生技术发展应用水平较低,在拟真度、测试效率与整车级测试能力方面存在诸多不足;未来需进一步加强全场景、高保真建模技术与实时仿真软件研发,建立虚实交互的在线加速孪生测试系统,研究自动驾驶全栈危险测试场景生成和加速测试方法,整合自动驾驶测试技术和工具,形成自动驾驶测试评价的工具链,完善标准规范。Abstract: In view of the high cost, long cycle, low coverage, and lack of a perfect tool chain for autonomous driving vehicle tests in the actual complex traffic environment, the research status of seven major areas of testing and evaluation technologies for autonomous driving was analyzed, and the future development direction of testing and evaluation technologies for autonomous driving was predicted, including simulation and testing technology of autonomous driving vehicles, simulation and testing technology of traffic flow, hardware-in-the-loop testing technology, field testing technology, intelligence evaluation technology, testing and evaluation tool chain and its system's construction, certification and potential defect detection technology, etc. In terms of simulation and testing of autonomous driving vehicles, the research status of simulation and testing software for autonomous driving, vehicle dynamics models, background vehicle interaction behavior models for testing, simulation and testing of cloud control platform supervision, and standardization of vehicle simulation system was analyzed. The main problems currently existing in the simulation and testing of autonomous driving vehicles were summarized. In terms of simulation and testing of autonomous driving traffic flow, the research status of driving style models for test background vehicles, traffic flow modeling and simulation, traffic scenario generation methods, and acceleration testing methods was summarized, and the future development trend of simulation and testing of autonomous driving traffic flow was predicted. In terms of hardware-in-the-loop testing technology, the human-vehicle-road-loop multi-dimensional digital twin tests and construction methods of the system platform for autonomous driving vehicles were summarized. Typical sensor data from high-definition cameras, millimeter-wave radars, and ultrasonic radars, as well as simulation technology of vehicle-to-vehicle and vehicle-to-road communication signals, were reviewed. In terms of field testing technology, the development status of closed field testing, open road testing, and highway test-related testing fields, testing standards, and key technologies were summarized. In terms of intelligence evaluation technology, the research status of intelligence evaluation methods for autonomous driving was introduced from four aspects: the concept of autonomous driving intelligence, the quantification and evaluation of scene complexity, the intelligence evaluation systems of autonomous driving, and the social cooperation evaluation methods. In terms of testing and evaluation tool chain and system construction, the current situation of the testing and evaluation standard system for autonomous driving was introduced mainly from three aspects: the testing and evaluation tool chain technology, the autonomous driving testing evaluation system, and the current situation of autonomous driving testing standards. Finally, in terms of certification and potential defect detection technology, the current defect detection methods for autonomous driving were reviewed from the definition, cause, classification, and detection of autonomous driving defects. The challenges faced in the safety assurance of autonomous driving vehicles were summarized. Research results show that although the autonomous driving testing and evaluation technology has made great progress, the testing and evaluation standard system is still not perfect, and the existing testing tools and methods fail to meet the testing needs of autonomous driving vehicles at level three and above. The development and application level of virtual simulation and digital twin technology is low, and there are many deficiencies in the degree of simulation, testing efficiency, and vehicle testing ability. In the future, it is necessary to further strengthen the research and development of full-scene and high-fidelity modeling technology and real-time simulation software, establish an online accelerated twin testing system with virtual and real interaction, study the scenario generation and acceleration methods of autonomous driving full-stack hazardous testing, and integrate autonomous driving testing technologies and tools, so as to form a tool chain for autonomous driving testing and evaluation and improve standard specifications.
-

图 3 自动驾驶车辆仿真测试技术组织结构
Figure 3. Organizational structure of simulation and testing technology of autonomous driving vehicles

图 8 C-ASAM工作组研究框架与内容拓展
Figure 8. Research framework and content expansion of C-ASAM working group

图 9 自动驾驶交通流仿真测试技术组织结构
Figure 9. Organizational structure of simulationand testing technology of autonomous driving traffic flow

图 12 传统仿真基于车道的建模描述
Figure 12. Lane-based modeling description of traditional simulation

图 13 现实中非结构化道路处基于面域运动的交通流
Figure 13. Traffic flow based on area movement on unstructured roads in reality

图 14 硬件在环测试技术组织结构
Figure 14. Organizational structure of hardware-in-the-loop testing technology

图 15 自动驾驶场地测试技术组织结构
Figure 15. Organizational structure of field testing technology of autonomous driving

图 19 自动驾驶智能性评价方法组织结构
Figure 19. Organizational structure of intelligence evaluation method of autonomous driving

图 21 基于场景复杂度的车辆智能性评价体系
Figure 21. Vehicle intelligence evaluation system based on scenario complexity

图 22 自动驾驶车辆的行驶自治性、社会合作性和学习进化性
Figure 22. Driving autonomy, social cooperation and learning evolution of autonomous driving vehicles

图 24 近十年自动驾驶标准发布数量趋势
Figure 24. Trend of issued number of autonomous driving standards in the past decade

图 26 自动驾驶车辆认证与潜在缺陷检测技术组织结构
Figure 26. Organizational structure of certification and potential defect detection technology of autonomous driving vehicles

图 28 对自车运动决策构成危险的几种情形
Figure 28. Several situations posing risks to movement decision-making of autonomous driving vehicles

图 29 对场景风险因子和交通物理原理交叉分析得到的交通干扰场景
Figure 29. Traffic interference scenarios obtained from cross analysis of scenario risk factors and traffic physics principles
表 1 三种自动驾驶测试方法优缺点对比
Table 1. Comparison of advantages and disadvantages of three autonomous driving test methods
方法 仿真测试 封闭场地测试 开放道路测试 对象 软件、硬件、虚拟环境 真实车辆、实际道路、模拟参与者 真实车辆、真实道路、真实参与者 优点 虚拟的测试环境;安全;丰富的测试场景;可重复且测试效率高 真实车辆和道路;封闭场景单一;可重复测试;安全可控 真实的车辆、道路和参与者;连续多变的测试场景;贴合实际应用 缺点 依赖车辆动力学模型;精度不高;无法验证车辆的执行能力 建设场地费用较大;测试场景数量有限;可升级性不高 路况不可控,安全风险大;需要大量的时间和成本投入;可重复性差  下载: 导出CSV
下载: 导出CSV
表 2 主要仿真测试工具及其特点
Table 2. Main simulation test tools and their characteristics
主要目的 软件 所属公司 车辆动力学模型 传感器与环境模型 交通参与者模型 车辆动力学仿真 CarSim MSC 好 有 有 CarMaker IPG 好 有 有 交通流仿真 VISSIM PTV 无 无 良 SUMO DLR 无 无 良 ADAS仿真测试 PreScan TASS 有 良 有 VTD VIRES 有 良 有 SCANeR OKTAL 有 良 有 Panosim 天行健 良 良 有 CARLA Intel 无 有 有 自动驾驶仿真测试 Carcraft Waymo 有 好 良 TAD Sim 腾讯 有 好 良 51Sim-One 51WORLD 有 好 良 Apollo 百度 有 好 良
下载: 导出CSV
表 3 不同控制模型优缺点
Table 3. Advantages and disadvantages of different control models
模型类型 车辆模型 优点 缺点 几何模型 基于阿克曼转向的几何模型 简单,只需少量参数;有效描述车辆位置与路径的关系;控制器设计简单 未考虑车辆运动学与动力学特性 运动学模型 全车运动学模型 考虑到相对于局部坐标和全局坐标的车辆航向之间存在不同方向的可能性 未考虑车辆动力学特性;略微比几何模型复杂 半车运动学模型(自行车模型) 模型简单,便于控制器的设计 未考虑车辆动力学特性;假设车辆相对于局部坐标的航向与相对于全局坐标的航向相同 带侧偏角的运动学模型 模型中考虑车辆的侧偏特性 未考虑车辆动力学特性;增加了建模复杂度 动力学模型(线性) 全车动力学模型 考虑了所有车轮的力,尤其是在转向运动中 未考虑轮胎的非线性特性 半车动力学模型(自行车模型) 考虑了车辆的动力学特性,较为常用 未考虑轮胎的非线性特性;忽略左右车轮不同响应带来的影响 动力学模型(非线性) 全车动力学模型 考虑了所有车轮的力,尤其是在转向运动中;考虑轮胎响应相对于侧偏角的非线性 模型复杂,不能保证控制的实时性 半车动力学模型(自行车模型) 考虑轮胎响应相对于侧偏角的非线性 未考虑转向时内外侧车轮的差异带来的影响
下载: 导出CSV
表 4 自动驾驶封闭测试场地建设类别
Table 4. Construction categories of closed test fields for autonomous driving
场地名称 自动加速与制动测试场地、自动转向“S”型路线测试场地、弯道行驶测试场地、坡道停车和起步测试场地、道路入口测试场地、道路出口测试场地 人行横道减速测试场地、减速丘限速测试场地、道路限速测试场地、施工区测试场地、停车让行测试场地、减速让行测试场地、锥形交通路标测试场地 人行横道信号灯识别与响应测试场地、平面交叉口场景测试场地、进出环岛测试场地 隧道模拟测试场地、前方车辆静止测试场地、前方车辆紧急制动测试场地、前方车辆减速测试场地、主动换道测试场地、前方行人横穿测试场地 测试用途 基于不同的道路类型测试自动驾驶 基于不同的交通标志标线及其他道路交通设施测试自动驾驶 基于交叉口、环岛及信号灯等交通设施测试自动驾驶 测试其他交通参与者及定位信号遮蔽道路对自动驾驶的影响
下载: 导出CSV
表 5 国外主要智能网联汽车试验场对比分析
Table 5. Comparative analysis of major foreign connected and automated vehicle test fields
名称 国家 占地面积/104m2 建成时间 测试功能 特点分析 Mcity 美国 13.0 2015年 自动驾驶技术、V2X技术 强化试验,柔性化设计 Asta Zero 瑞典 200.0 2014年 车辆动力学、驾驶人行为、V2X技术 ADAS场景测试与模拟设备,具备完整的测试功能 Smart Road 美国 20世纪80年代 自动驾驶技术、智能交通系统、V2X技术 天气模拟系统、照明和能见度检测系统 City Circuit 英国 304.0 传统汽车、智能交通系统、智能网联汽车测试 网联汽车测试设备、跟踪定位与监控设备 Gomentum Station 美国 850.0 2014年 自动驾驶技术、V2X技术 2条真实的隧道,测试面积大 Castle Air Force Base 美国 24.3 2011年 自动驾驶技术 Willow Run 美国 136.0 2018年 自动驾驶技术、V2X技术 天然坑洞与3层立交桥
下载: 导出CSV
表 6 中国关于智能网联汽车开放道路测试的相关标准、法规与政策
Table 6. Standards, regulations, and policies related to open road testing of connected and automated vehicles in China
时间 标准、法规与政策 2017.12 《北京市自动驾驶车辆道路测试管理实施细则(试行)》 2018.03 《上海市智能网联汽车道路测试管理办法(试行)》 2018.03 《重庆市自动驾驶道路测试管理实施细则(试行)》 2018.04 《智能网联汽车道路测试管理规范(试行)》 2018.08 《杭州市智能网联车辆道路测试管理实施细则(试行)》 2018.10 《深圳市智能网联汽车道路测试开放道路技术要求(试行)》 2018.12 广州市《关于智能网联汽车道路测试有关工作的指导意见》 2019.10 《自动驾驶车辆道路测试安全管理规范》 2021.07 《智能网联汽车道路测试与示范应用管理规范(试行)》 2022.10 《道路车辆自动驾驶系统测试场景词汇》 2023.11 《四部委关于开展智能网联汽车准入和上路通行试点工作的通知》
下载: 导出CSV
表 7 欧美各国关于智能网联汽车开放道路测试的相关标准、法规与政策
Table 7. Standards, regulations, and policies related to open road testing of connected and automated vehicles in European and American countries
时间 国家 标准、法规与政策 2016.09 美国 《联邦自动驾驶汽车政策指南》 2017.05 德国 《自动驾驶法》 2016.05 日本 《自动驾驶汽车道路测试指南》 2015.07 英国 《自动驾驶汽车发展道路:道路测试指南》 2017.05 瑞典 《自动驾驶汽车公共道路测试规范》
下载: 导出CSV
表 8 自动驾驶车辆安全性、舒适性与高效性研究
Table 8. Research on safety, comfort and efficiency of autonomous driving vehicles
角度 安全性 舒适性 高效性 相关文献 开发设计 $ \checkmark$ [211]、[212] $ \checkmark$ [213] $ \checkmark$ [214] $ \checkmark$ $ \checkmark$ [215] $ \checkmark$ $ \checkmark$ [216]、[217] 测试评价 $ \checkmark$ [218] $ \checkmark$ [219] $ \checkmark$ [220] $ \checkmark$ $ \checkmark$ [221] $ \checkmark$ $ \checkmark$ [222] $ \checkmark$ $ \checkmark$ $ \checkmark$ [200]
下载: 导出CSV
表 9 自动驾驶测试场景中复杂度的量化方法
Table 9. Quantitative methods of complexity in autonomous driving testing scenarios
复杂度定义视角 量化方法 主/客观 量化要素 数据获取视角 文献 基于场景内部构成描述并量化复杂度 Multi-Factor Analysis、Survey 主观 ● ★ ◆ 车外 [231] AHP 主观 ■ ◆ 车外 [195] Ontology、AHP 主客观结合 ◆ 车外、自车 [238] 主客观结合 ▲★ 车外、自车 [238] 基于场景外部观测定义并量化复杂度 SVR 主客观结合 ● ■ ◆ 车外 [235] Survey 主观 ● ■ ◆ 车外、自车 [234] Random Forest 主客观结合 ● ◆ 自车 [236] NASA-TLX Surveys 主客观结合 ● ★ ■ 自车 [237] Drivable Area、Entropy 客观 ● ▲ ★ ◆ 车外 [232]
下载: 导出CSV
表 10 不同比赛中自动驾驶车辆智能度评价方法对比
Table 10. Comparison of intelligence evaluation methods of autonomous driving vehicles in different competitions
比赛/项目 国家 首届时间 考察功能或性能 指标 Percept OR 美国 2001年 自主行为能力 自主行驶里程、任务耗时、行驶速度、人工干预次数、任务失败次数 Grand Challenge 美国 2004年 自主行为能力 行驶里程、完成时间 Urban Challenge 美国 2007年 自主行为能力和部分交互能力 任务完成时间、完成质量、违反交通规则、危险行为 智能车未来挑战赛 中国 2009年 安全性、舒适性、敏捷性、智能性 完成任务总时间、任务完成质量、人工干预次数 自动驾驶车辆挑战赛 中国 2018年 智能性、安全性、人机交互、能效 任务完成时间、任务完成度、人工干预次数
下载: 导出CSV
表 11 不同研究中自动驾驶车辆智能度评价方法对比
Table 11. Comparison of intelligence evaluation methods of autonomous driving vehicles in different studies
来源 机构 评价目标/准则/指标 类型 Lowrie等[239] 马里兰大学 总行驶里程、人工控制行为、人工干涉率等 基于里程 Pomerleau等[240] 卡内基梅隆大学 基于里程 Broggi等[241] 帕尔马大学 基于里程 Maurer等[242] 慕尼黑国防大学 基于里程 美国国家标准与技术研究院[243] 人工干预度、环境复杂度、任务复杂度 基于里程 Wang等[244] 中国科学院沈阳自动化研究所 感知技术、导航技术、人机交互、信息通讯技术、路径规划技术、多平台协同技术、运动控制技术、任务规划、学习适应 基于场景 Sun等[245] 北京理工大学 车辆控制行为、基本和高级行车行为、基本和高级交通行为 基于场景 蒙昊蓝等 同济大学 行驶自治性、社会合作性、学习进化性 基于场景
下载: 导出CSV
表 12 背景车模型的分类与优势分析
Table 12. Classification and advantage analysis of background vehicle models
控制方式 既定轨迹 跟驰模型 驾驶行为模型 可解释性 参数化、可解释 参数化、可解释 无解析表达 状态空间复杂度 极低 低、确定性 高、概率性 交互能力 无 纵向 纵向、侧向 优势 完全可重复性高 可解释性较强 类人决策实现多种驾驶风格或动机
下载: 导出CSV
表 13 各国自动驾驶测试工具链集成方案
Table 13. Tool chain integration schemes for autonomous driving test in various countries
序号 名称 国家 合作单位 特征 1 Test Bed Lower Saxony for Automated and Connected Mobility 德国 德国航天中心、德国交通部、德国西门子、大众、沃尔沃 覆盖城乡、高速公路等多种道路,支持硬件、软件、驾驶人与车辆在环测试工具的自动驾驶测试系统 2 VTD 美国 德国VIRES 提供复杂交通场景与物理驱动模拟,包含软硬件、驾驶人与车辆在环的测试环境 3 ASAM OpenX 德国 ASAM 提供驾驶和交通模拟器界面,包含用于验证自动驾驶功能的静态和动态内容 4 Drive Sim/Drive Constellation 美国 英伟达 围绕车端、桌面端、云端构建了GPU硬件统一架构和CUDA软件架构,为自动驾驶应用领域提供支持 5 Apollo 中国 百度 包括完整的软硬件和服务系统,包括车辆平台、硬件平台、云端数据服务等;场景库包括了法规标准场景、危险工况场景和能力评估场景共200种 6 华为八爪鱼(HUAWEI Octopus) 中国 华为 在数据采集、数据挖掘、数据标注、算法训练、仿真平台等方面提供完整解决方案,包含大量数据集和场景库 7 TAD Sim 中国 腾讯 通过工业级车辆动力学模型、虚实结合等技术打造虚实结合、线上线下一体的自动驾驶仿真平台
下载: 导出CSV
表 14 各国自动驾驶测试评价相关项目
Table 14. Projects related to autonomous driving test and evaluation in various countries
序号 项目/机构 国家 时间 方法 核心 测试目标 测试工具 1 Waymo 美国 2013年 虚拟仿真测试 模拟各种复杂路况 提升测试里程数与加速测试 基于Carcraft的虚拟仿真测试 2 AdaptIVe 欧洲 2014年 面向L2级以上实车测试 侧重于用户体验相关指标的研究 研究车载传感器与车对车互联、V2X 开放道路测试 3 Cruise 美国 2016年 虚拟仿真测试 现实场景转化到可以编辑的虚拟场景 推进L4级自动驾驶车辆测试 基于Morpheus的虚拟仿真测试 4 PEGASUS 德国 2016年 虚拟仿真测试 通过虚拟仿真环境对自动驾驶技术进行测试和验证 提高自动驾驶车辆安全性 基于研发的虚拟仿真软件 5 BMW 德国 2017年 面向L4级虚拟仿真测试与实车测试 通过数据驱动进行严格的测试 提高自动驾驶车辆安全性 基于Unity的虚拟仿真测试与开放道路测试 6 TRI 日本 2017年 实车测试 高级驾驶辅助模式和完全自动驾驶模式的综合测试 防止车辆直接撞向前方物体,探测驾驶人行为 开放道路测试 7 车路协同联合实验室 中国 2018年 实车测试 以车辆的需求为主体,传送不同的信息给不同的车辆 研究CAV与路侧基站的信息感知及交互能力,CAV开启与否对AEB功能的影响 开放道路测试 8 中国科学院自动化研究所 中国 2019年 虚拟仿真测试与实车测试 提出一种新的图灵测试方法测试无人车对复杂场景的理解和决策能力 研究无人车对复杂交通场景的理解与决策的能力 基于无人驾驶测试与验证系统的虚拟仿真测试与封闭道路测试 9 长安大学 中国 2021年 自动驾驶仿真与数字孪生测试评价工具链 面向演进交通环境下的自动驾驶上路许可与效能评价 加速突破适应演进交通环境的高等级自动驾驶系统上路许可与效能评价中的关键技术,开发面向智能评级、缺陷识别及安全认证的完整工具链 实时仿真软件、加速仿真云平台、场地孪生测试系统、整车交通在环测试平台与综合效能评价体系 10 百度Apollo 中国 2021年 面向L3/L4级虚拟仿真测试与实车测试 侧重于实现量产园区自动驾驶、限定区域城市自动驾驶、城市全网自动驾驶 研究使用纯路侧感知能力,真正实现开放道路连续路网L4级别自动驾驶闭环的车路协同技术 基于Apollo Studio虚拟仿真测试与开放道路测试
下载: 导出CSV
表 15 各国近十年发布的关于自动驾驶的法规
Table 15. Regulations on autonomous driving issued by various countries in past decade
国家 法规 时间 机构/地点 主要内容 中国 《北京市自动驾驶车辆道路测试管理实施细则(试行)》 2017年 北京市交通委员会、北京市公安交通管理局、北京市经济和信息化局 规定了自动驾驶的研发和测试中对测试单位申请条件、车辆要求与驾驶要求等 《智能网联汽车道路测试管理规范(试行)》 2018年 工信部、公安部、交通运输部 发布智能网联汽车发展技术路线图,制定了发展目标和战略规划 《智能网联汽车自动驾驶功能测试规程(试行)》 2018年 智能网联汽车产业创新联盟、全国汽车标准化技术委员会智能网联汽车分技术委员会 规定了14个自动驾驶功能与34个场景 《智能网联汽车道路测试与示范应用管理规范(试行)》 2021年 交通运输部、工信部、公安部 主要明确了道路测试、示范应用及测试区(场)的定义,将道路测试和示范应用的范围扩展到包括高速公路在内的公路、城市道路和区域,并对省、市级相关主管部门的主要职责与工作机制进行了说明 《自动驾驶汽车运输安全服务指南(试行)》 2022年 交通运输部 要求从事运输经营的自动驾驶车辆应当具备车辆运行状态记录、存储和传输功能,向运输经营者和属地交通运输主管部门及时传输相关信息 《道路车辆动驾驶系统测试场景词汇》 2022年 工信部 规范了自动驾驶系统、动态驾驶任务、设计运行范围及条件等概念,明确了场景、动静态环境与实体要素之间的关系,与功能安全、预期功能安全等国际标准建立了配套关系 美国 《自动驾驶法案(H.R. 3388)》 2017年 众议院 首次对自动驾驶车辆的生产、测试和发布进行管理 《自动驾驶车辆法》 2021年 亚利桑那州 只要车内有驾驶人,L3和L4级就可以在亚利桑那州的公共道路上行驶 《自动驾驶客运服务试验和部署计划书》 2021年 加利福尼亚州 将自动驾驶所有活动分为4种,并形成4种不同计划的监管规则 德国 《道路交通法第八修正案》 2017年 联邦议院 允许L3级自动驾驶上路行驶,规定记录装置,明确交通事故责任 《道路交通法修正案(自动驾驶法)》 2021年 联邦政府、联邦议院、参议院 允许自动驾驶L4级车辆在特定场景下和特定区域内行驶 日本 《自动驾驶汽车道路测试指南》 2016年 警察厅 要求驾驶人须坐在驾驶位置上进行测试并遵守相应法律法规,且先进行封闭试验场地测试 《道路交通法》 2019年 众议院、政府内阁 允许L3级自动驾驶上路行驶 英国 《自动驾驶车辆发展道路:无人驾驶技术规则综述》 2016年 商务部、交通运输部 支持Google、捷豹、沃尔沃、日产等自动驾驶车辆制造厂商在英国进行公共道路测试 《汽车技术和航空法案》 2017年 交通运输部 规定了自动驾驶车辆发生事故时的责任分配问题以及影响责任判定的因素 《自动与电动汽车法案》 2018年 交通运输部 规定了自动驾驶车辆引起的交通事故保险赔付方法 《自动驾驶联合报道》 2022年 英格兰和威尔士法律委员会、苏格兰法律委员会 提出75条自动驾驶法规方面的建议
下载: 导出CSV
表 16 自动驾驶测试标准包含的测试功能
Table 16. Test functions included in autonomous driving test standards
标准 功能 ACC FCW 变道决策 盲区检测 LKA 车道偏离预警 AEB 低速跟踪 ISO 17387:2008 √ ISO 22178:2009 √ ISO 15623:2013 √ ISO 17361:2017 √ ISO 15622:2018 √ SAE J2400—2014 √ SAE J2399—2021 √ 《智能运输系统自适应巡航控制系统性能要求与检测方法》(GB/T 20608—2006) √ 《智能运输系统车道偏离报警系统性能要求与检测方法》 (GB/T 26773—2011) √ 《乘用车自动紧急制动系统(AEBS)性能要求及试验方法》(GB/T 39901—2021) √ NHTSA[262] √ √ √ √ √ Euro-NCAP[263] √ √ √ √ A-NCAP[264] √ √ √ √ √ C-NCAP[265] √
下载: 导出CSV
表 17 自动驾驶测试标准包含的评价指标
Table 17. Evaluation indicators included in autonomous driving test standards
标准 评价指标 伤害的严重性 暴露于危险中的可能性 危险的可控性 风险可接受性 警报准确性 系统报警重复性 警报可接受性 碰撞警报及时性 安全等级独立性 目标识别准确性 防撞击性 探测区域有效性 车道辅助系统的避让性 抗翻滚性 ISO 15623:2013 √ √ √ √ √ ISO 17361:2017 √ √ √ ISO 26262:2018 √ √ √ √ ISO 21448:2022 √ √ √ √ SAE J2400—2003[266] √ √ √ √ √ SAE J2980—2018 √ √ √ SAE J2399—2021 √ GB/T 26773—2011 √ √ √ GB/T 34590—2017 √ √ √ √ NHTSA 26555[262] √ √ √ √ √ NHTSA NCAP[267] √ √ √ √ √ √ √ C-NCAP[267] √ √ √ Euro-NCAP[268] √ √ √ J-NCAP[269] √ √
下载: 导出CSV
表 18 毫米波雷达感知干扰分析框架
Table 18. Analysis framework of sensing interferences from millimeter-wave radars
毫米波雷达 物理原理(信号感知/传感器安装方位角) 被测目标物的信号 其他探测物的信号 频率 相位 能量 噪音 非期望的信号 探测方向 传播延迟变化 无信号(部分信号) 高频 信号差异大 反射 折射 混叠 谐波 低信噪比 有效信号比例低 无效信号增长 感知干扰的因果因子 自车/ 传感器 自车 车辆姿态改变 ○ ○ ○ 传感器 装配松动 ○ ○ ○ ○ ○ 传感器失效 ○ ○ ○ ○ ○ ○ ○ 前表面 黏附物 ○ ○ ○ 物理特性改变 ○ ○ ○ 环境 结构化目标物 道路表面 形状 ○ ○ ○ 道路情况 ○ ○ 路面材质 ○ ○ 路边物体 反射 ○ ○ ○ ○ 遮挡 ○ ○ 背景 头顶物体 反射 ○ ○ 遮挡 ○ 背景 空间 空间物体 ○ ○ ○ ○ 空间电磁波和光线 ○ ○ 移动目标物 反射 ○ ○ ○ ○ ○ 遮挡 背景 感知目标物 车道 线条 颜色/材质 形状 脏污/模糊 相对位置 具有高度的结构化物体 颜色/材质 ○ 形状-反射强度大 ○ ○ ○ 形状-反射强度小 ○ 脏污 ○ 相对位置 ○ 道路边缘 道路边缘(平坦) 颜色/材质 ○ 形状 ○ 脏污/模糊 ○ 相对位置 ○ 道路边缘(不均匀) 颜色/材质 ○ 形状 ○ 脏污/模糊 ○ 相对位置 ○ 道路上的障碍物 掉落物 颜色/材质 ○ 形状 ○ 相对位置/运动 ○ 动物 颜色/材质 形状 ○ 相对位置/运动 ○ 临时建筑 颜色/材质 ○ 形状-反射强度大 ○ ○ ○ 形状-反射强度小 ○ 脏污 ○ 相对位置 ○ 移动目标物 其余车辆 颜色/材质 形状-反射强度大 ○ ○ 形状-反射强度小 ○ 脏污 ○ 相对位置 ○ 摩托车 颜色/材质 ○ 形状/大小 ○ 黏附物 ○ 相对位置 ○ 自行车 颜色/材质 ○ 形状/大小 ○ 黏附物 ○ 相对位置 ○ 行人 颜色/材质 ○ 形状/大小 ○ 相对位置 ○
下载: 导出CSV
表 19 自动驾驶缺陷分类
Table 19. Classification of autonomous driving defects
分类依据 名称 含义 示例 生产环节 制造缺陷 制造过程中产品偏离预期设计 传感器功能障碍 设计缺陷 未采纳替代设计规避可预计的风险 自动驾驶软件设计忽略了某些对人身财产安全具有重要影响的因素 警示缺陷 说明或警示不充分带来的不合理危险 某些特定工况下,自动驾驶系统未能向用户发出警示和接管请求 安全风险来源 功能安全缺陷 导致自动驾驶电子电气系统功能异常的安全风险因素 软硬件故障 预期功能安全缺陷 由于自动驾驶功能实现不足而导致安全风险的因素 传感器感知性能不足 信息安全缺陷 可能使自动驾驶系统处于网络攻击威胁的因素 通信协议漏洞
下载: 导出CSV
表 20 针对智能网联汽车信息安全常见的网络攻击模型
Table 20. Common network attack models for information security of connected and automated vehicles
网络攻击模型 目标组件 访问方式 针对OBD设备的攻击 OBD 物理端口 通过OBD对CAN总线的攻击 CAN 物理端口 远程访问ECU对CAN总线的攻击 CAN 远程访问 通过CAN总线对ECU进行攻击 ECU 物理端口 远程攻击ECU ECU 远程访问 激光雷达欺骗 激光雷达 远程访问 激光雷达干扰 激光雷达 远程访问 雷达欺骗 雷达 远程访问 雷达干扰 雷达 远程访问 GNSS欺骗 GNSS 远程访问 GNSS干扰 GNSS 远程访问 对抗训练的图片干扰 相机 远程访问 网络信息伪造 连接机制 远程访问 网络拒绝服务攻击 连接机制 远程访问
下载: 导出CSV
-
[1] GAO Feng, DUAN Jian-li, HAN Zai-dao, et al. Automatic virtual test technology for intelligent driving systems considering both coverage and efficiency[J]. IEEE Transactions on Vehicular Technology, 2020, 69(12): 14365-14376. doi: 10.1109/TVT.2020.3033565 [2] 邓晓峰, 王润民, 徐志刚, 等. 我国智能网联汽车测试及示范基地发展现状[J]. 汽车工业研究, 2019(1): 6-13. doi: 10.3969/j.issn.1009-847X.2019.01.001DENG Xiao-feng, WANG Run-min, XU Zhi-gang, et al. Development status of intelligent networked automobile testing and demonstration base in China[J]. Auto Industry Research, 2019(1): 6-13. (in Chinese) doi: 10.3969/j.issn.1009-847X.2019.01.001 [3] 孙航, 李志军, 张琳琳, 等. 基于OEDR和ODC的自动驾驶汽车实际道路测试评价技术研究[J]. 汽车工程, 2022, 44(6): 842-850.SUN Hang, LI Zhi-jun, ZHANG Lin-lin, et al. Research on the test and evaluation technique of real roads for automated driving vehicles based on OEDR and ODC[J]. Automotive Engineering, 2022, 44(6): 842-850. (in Chinese) [4] WANG Jun-min, STEIBER J, SURAMPUDI B. Autonomous ground vehicle control system for high-speed and safe operation[J]. International Journal of Vehicle Autonomous Systems, 2009, 7(1/2): 18-35. doi: 10.1504/IJVAS.2009.027965 [5] PING E P, HUDHA K, JAMALUDDIN H. Hardware-in-the-loop simulation of automatic steering control for lanekeeping manoeuvre: outer-loop and inner-loop control design[J]. International Journal of Vehicle Safety, 2010, 5(1): 35-59. doi: 10.1504/IJVS.2010.035318 [6] ZAKARIA M A, ZAMZURI H, MAMAT R, et al. A path tracking algorithm using future prediction control with spike detection for an autonomous vehicle robot[J]. International Journal of Advanced Robotic Systems, 2013, DOI: 10.5772/56658. [7] ELBANHAWI M, SIMIC M, JAZAR R. The role of path continuity in lateral vehicle control[J]. Procedia Computer Science, 2015, 60: 1289-1298. doi: 10.1016/j.procs.2015.08.194 [8] RAFFO G V, GOMES G K, NORMEY-RICO J E, et al. A predictive controller for autonomous vehicle path tracking[J]. IEEE Transactions on Intelligent Transportation Systems, 2009, 10(1): 92-102. doi: 10.1109/TITS.2008.2011697 [9] GUO Lie, GE Ping-shu, YANG Xiao-li, et al. Intelligent vehicle trajectory tracking based on neural networks sliding mode control[C]//IEEE. Proceedings 2014 International Conference on Informative and Cybernetics for Computational Social Systems (ICCSS). New York: IEEE, 2014: 57-62. [10] SCHIEHLEN W O. Computer generation of equations of motion[C]//Springer. Computer Aided Analysis and Optimization of Mechanical System Dynamics. Berlin: Springer, 1984: 183-215. [11] SCHIEHLEN W O, KREUZER E J. Symbolic computerized derivation of equations of motion[C]//Springer. Dynamics of Multibody Systems: Symposium Munich. Berlin: Springer, 1977: 290-305. [12] ORLANDEA N, CALAHAN D A, CHACE M A. A sparsity-oriented approach to the dynamic analysis and design of mechanical systems—part 2[J]. Journal of Engineering for Industry, 1977, 99(3): 780-784. doi: 10.1115/1.3439313 [13] CHACE M A. Methods and experience in computer aided design of large-displacement mechanical systems[C]//Springer. Computer Aided Analysis and Optimization of Mechanical System Dynamics. Berlin: Springer, 1984: 233-259. [14] 王敬, 杨志刚, 王勇. 汽车四轮转向四自由度动力学模型[J]. 山东交通学院学报, 2008, 16(1): 11-15. doi: 10.3969/j.issn.1672-0032.2008.01.003WANG Jing, YANG Zhi-gang, WANG Yong. A four-degree freedom dynamics model of automotive four-wheel-steering[J]. Journal of Shandong Jiaotong University, 2008, 16(1): 11-15. (in Chinese) doi: 10.3969/j.issn.1672-0032.2008.01.003 [15] LIU Z, PAYRE G, BOURASSA P. Nonlinear oscillations and chaotic motions in a road vehicle system with driver steering control[J]. Nonlinear Dynamics, 1996, 9: 281-304. doi: 10.1007/BF01833746 [16] BLAJER W. An effective solver for absolute variable formulation of multibody dynamics[J]. Computational Mechanics, 1995, 15(5): 460-472. doi: 10.1007/BF00350358 [17] 王阳阳, 靳晓雄, 左曙光, 等. 基于R-W多体理论的整车动力学仿真平台研究[J]. 汽车工程, 2008, 30(1): 22-25. doi: 10.3321/j.issn:1000-680X.2008.01.005WANG Yang-yang, JIN Xiao-xiong, ZUO Shu-guang, et al. A research on vehicle dynamics simulation platform based on R-W method of multi-body dynamics[J]. Automotive Engineering, 2008, 30(1): 22-25. (in Chinese) doi: 10.3321/j.issn:1000-680X.2008.01.005 [18] JIN Ting, GONG Yun-qiu, WEI Chun-yu. Vehicle dynamics modeling based on vortex[J]. Applied Mechanics and Materials, 2014, 624: 289-292. doi: 10.4028/www.scientific.net/AMM.624.289 [19] 胡隽卿. 两自由度铰接越野车辆行驶动力学特性研究[D]. 长春: 吉林大学, 2011.HU Jun-qing. Study of the ride dynamics characteristics of the off-road vehicle with two degree of freedom articulated body[D]. Changchun: Jilin University, 2011. (in Chinese) [20] 杨怀广. 面向多运动工况的主动悬架火星车建模及仿真技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2020.YANG Huai-guang. Research on modeling and simulation of mars rovers with active suspension system for variable moving conditions[D]. Harbin: Harbin Institute of Technology, 2020. (in Chinese) [21] WANG Jian-qiang, ZHANG Lei, ZHANG De-zhao, et al. An adaptive longitudinal driving assistance system based on driver characteristics[J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(1): 1-12. doi: 10.1109/TITS.2012.2205143 [22] ZHAO Xiao-cong, HE Ren, WANG Jian-qiang. How do drivers respond to driving risk during car-following? Risk-response driver model and its application in human-like longitudinal control[J]. Accident Analysis and Prevention, 2020, 148: 105783. doi: 10.1016/j.aap.2020.105783 [23] WADA T, DOIS, TSURU N, et al. Characterization of expert drivers' last-second braking and its application to a collision avoidance system[J]. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(2): 413-422. doi: 10.1109/TITS.2010.2043672 [24] PAPATHANASOPOULOU V, ANTONIOU C. Towards data-driven car-following models[J]. Transportation Research Part C: Emerging Technologies, 2015, 55: 496-509. doi: 10.1016/j.trc.2015.02.016 [25] YU Rong-jie, ZHANG Rui-ci, AI Hao-an, et al. Personalized driving assistance algorithms: case study of federated learning based forward collision warning[J]. Accident Analysis and Prevention, 2022, 168: 106609. doi: 10.1016/j.aap.2022.106609 [26] KHODAYARI A, GHAFFARI A, KAZEMI R, et al. A modified car-following model based on a neural network model of the human driver effects[J]. IEEE Transactions on Systems, Man, and Cybernetics—Part A: Systems and Humans, 2012, 42(6): 1440-1449. doi: 10.1109/TSMCA.2012.2192262 [27] LEFÈVRE S, CARVALHO A, BORRELLI F. A learning-based framework for velocity control in autonomous driving[J]. IEEE Transactions on Automation Science and Engineering, 2016, 13(1): 32-42. doi: 10.1109/TASE.2015.2498192 [28] WANG Wen-shuo, ZHAO Ding, HAN Wei, et al. A learning-based approach for lane departure warning systems with a personalized driver model[J]. IEEE Transactions on Vehicular Technology, 2018, 67(10): 9145-9157. doi: 10.1109/TVT.2018.2854406 [29] ALI Y, HUSSAIN F, BLIEMER M C J, et al. Predicting and explaining lane-changing behaviour using machine learning: a comparative study[J]. Transportation Research Part C: Emerging Technologies, 2022, 145: 103931. doi: 10.1016/j.trc.2022.103931 [30] BUTAKOV V A, IOANNOU P. Personalized driver/vehicle lane change models for ADAS[J]. IEEE Transactions on Vehicular Technology, 2014, 64(10): 4422-4431. [31] ZHANG Yi-fan, CHEN Xin-hong, WANG Jian-ping, et al. A generative car-following model conditioned on driving styles[J]. Transportation Research Part C: Emerging Technologies, 2022, 145: 103926. doi: 10.1016/j.trc.2022.103926 [32] CHEN Zhi-gui, WANG Xue-song, GUO Qi-ming, et al. Towards human-like speed control in autonomous vehicles: a mountainous freeway case[J]. Accident Analysis and Prevention, 2022, 166: 106566. doi: 10.1016/j.aap.2022.106566 [33] 黄晶, 蓟仲勋, 彭晓燕, 等. 考虑驾驶人风格的换道轨迹规划与控制[J]. 中国公路学报, 2019, 32(6): 226-239, 247.HUANG Jing, JI Zhong-xun, PENG Xiao-yan, et al. Driving style adaptive lane-changing trajectory planning and control[J]. China Journal of Highway and Transport, 2019, 32(6): 226-239, 247. (in Chinese) [34] REN Guo-qing, ZHANG Yong, LIU Hao, et al. A new lane-changing model with consideration of driving style[J]. International Journal of Intelligent Transportation Systems Research, 2019, 17(3): 181-189. doi: 10.1007/s13177-019-00180-7 [35] ZHANG Yi-fan, XU Qian, WANG Jian-ping, et al. A learning-based discretionary lane-change decision-making model with driving style awareness[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(1): 68-78. doi: 10.1109/TITS.2022.3217673 [36] DESJARDINS C, CHAIB-DRAA B. Cooperative adaptive cruise control: a reinforcement learning approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4): 1248-1260. doi: 10.1109/TITS.2011.2157145 [37] ZHANG Yi, SUN Ping, YIN Yu-han, et al. Human-like autonomous vehicle speed control by deep reinforcement learning with double Q-learning[C]//IEEE. 2018 IEEE Intelligent Vehicles Symposium (Ⅳ). New York: IEEE, 2018: 1251-1256. [38] 朱冰, 蒋渊德, 赵健, 等. 基于深度强化学习的车辆跟驰控制[J]. 中国公路学报, 2019, 32(6): 53-60.ZHU Bing, JIANG Yuan-de, ZHAO Jian, et al. A car-following control algorithm based on deep reinforcement learning[J]. China Journal of Highway and Transport, 2019, 32(6): 53-60. (in Chinese) [39] LI Guo-fan, YANG Liang, LI Shen, et al. Human-like decision making of artificial drivers in intelligent transportation systems: an end-to-end driving behavior prediction approach[J]. IEEE Intelligent Transportation Systems Magazine, 2022, 14(6): 188-205. doi: 10.1109/MITS.2021.3085986 [40] HAN Lei, WU Lei, LIANG Fu-jian, et al. A novel end-to-end model for steering behavior prediction of autonomous ego-vehicles using spatial and temporal attention mechanism[J]. Neurocomputing, 2022, 490: 295-311. doi: 10.1016/j.neucom.2021.11.093 [41] 王鑫鹏, 陈志军, 吴超仲, 等. 考虑驾驶风格的智能车自主驾驶决策方法[J]. 交通信息与安全, 2020, 38(2): 37-46.WANG Xin-peng, CHEN Zhi-jun, WU Chao-zhong, et al. A method of automatic driving decision for smart car considering driving style[J]. Journal of Transport Information and Safety, 2020, 38(2): 37-46. (in Chinese) [42] ZHU Mei-xin, WANG Xue-song, WANG Yin-hai. Human-like autonomous car-following model with deep reinforcement learning[J]. Transportation Research Part C: Emerging Technologies, 2018, 97: 348-368. doi: 10.1016/j.trc.2018.10.024 [43] LI Dian-zhao, OKHRIN O. Modified DDPG car-following model with a real-world human driving experience with CARLA simulator[J]. Transportation Research Part C: Emerging Technologies, 2023, 147: 103987. doi: 10.1016/j.trc.2022.103987 [44] 焦新宇, 杨殿阁, 江昆, 等. 基于端到端学习机制的高速公路行驶轨迹曲率预测[J]. 汽车工程, 2018, 40(12): 1494-1499.JIAO Xin-yu, YANG Dian-ge, JIANG Kun, et al. Driving trajectory curvature prediction of vehicle on highway based on end-to-end learning mechanism[J]. Automotive Engineering, 2018, 40(12): 1494-1499. (in Chinese) [45] CHEN Long, HU Xue-min, TIAN Wei, et al. Parallel planning: a new motion planning framework for autonomous driving[J]. IEEE/CAA Journal of Automatica Sinica, 2019, 6(1): 236-246. doi: 10.1109/JAS.2018.7511186 [46] ARADI S. Survey of deep reinforcement learning for motion planning of autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 23(2): 740-759. [47] KIRAN B R, SOBH I, TALPAERT V, et al. Deep reinforcement learning for autonomous driving: a survey[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(6): 4909-4926. doi: 10.1109/TITS.2021.3054625 [48] WU Yuan-qing, LIAO Si-qin, LIU Xiang, et al. Deep reinforcement learning on autonomous driving policy with auxiliary critic network[J]. IEEE Transactions on Neural Networks and Learning Systems, 2023, 34(7): 3680-3690. doi: 10.1109/TNNLS.2021.3116063 [49] GUO Hong-yu, KEYVAN-EKBATANI M, XIE Kun. Lane change detection and prediction using real-world connected vehicle data[J]. Transportation Research Part C: Emerging Technologies, 2022, 142: 103785. doi: 10.1016/j.trc.2022.103785 [50] LI Guo-fa, QIU Yi-fan, YANG Yi-fan, et al. Lane change strategies for autonomous vehicles: a deep reinforcement learning approach based on transformer[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8(3): 2197-2211. doi: 10.1109/TIV.2022.3227921 [51] CHEN Qi, TANG Si-hai, YANG Qing, et al. Cooper: cooperative perception for connected autonomous vehicles based on 3D point clouds[C]//IEEE. 2019 IEEE 39th International Conference on Distributed Computing Systems (ICDCS). New York: IEEE, 2019: 514-524. [52] WANG Chao-jie, GONG Si-yuan, ZHOU An-ye, et al. Cooperative adaptive cruise control for connected autonomous vehicles by factoring communication-related constraints[J]. Transportation Research Procedia, 2019, 38: 242-262. doi: 10.1016/j.trpro.2019.05.014 [53] ARTHURS P, GILLAM L, KRAUSE P, et al. A taxonomy and survey of edge cloud computing for intelligent transportation systems and connected vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 6206-6221. doi: 10.1109/TITS.2021.3084396 [54] WANG Hao-xin, LIU Ting-ting, KIM B, et al. Architectural design alternatives based on cloud/edge/fog computing for connected vehicles[J]. IEEE Communications Surveys and Tutorials, 2020, 22(4): 2349-2377. doi: 10.1109/COMST.2020.3020854 [55] LIANG Si-yuan, WU Hao, ZHEN Li, et al. Edge YOLO: real-time intelligent object detection system based on edge-cloud cooperation in autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(12): 25345-25360. doi: 10.1109/TITS.2022.3158253 [56] WHAIDUZZAMAN M, SOOKHAK M, GANI A, et al. A survey on vehicular cloud computing[J]. Journal of Network and Computer Applications, 2014, 40: 325-344. doi: 10.1016/j.jnca.2013.08.004 [57] HOU Yun-fei, SELIMAN S M S, WANG En-shu, et al. Cooperative and integrated vehicle and intersection control for energy efficiency (CIVIC-E2)[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(7): 2325-2337. doi: 10.1109/TITS.2017.2785288 [58] KUMAR N, RAHMAN S S, DHAKAD N. Fuzzy inference enabled deep reinforcement learning-based traffic light control for intelligent transportation system[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(8): 4919-4928. doi: 10.1109/TITS.2020.2984033 [59] YUAN Jing, ZHENG Yu, XIE Xing, et al. Driving with knowledge from the physical world[C]//ACM. Proceedings of the 17th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining. New York: ACM, 2011: 316-324. [60] XU Wen-chao, ZHOU Hai-bo, CHENG Nan, et al. Internet of vehicles in big data era[J]. IEEE/CAA Journal of Automatica Sinica, 2017, 5(1): 19-35. [61] KAIWARTYA O, ABDULLAH A H, CAO Yue, et al. Internet of vehicles: motivation, layered architecture, network model, challenges, and future aspects[J]. IEEE Access, 2016, 4: 5356-5373. doi: 10.1109/ACCESS.2016.2603219 [62] SASAKI K, SUZUKI N, MAKIDO S, et al. Vehicle control system coordinated between cloud and mobile edge computing[C]// IEEE. 2016 55th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE). New York: IEEE, 2016: 1122-1127. [63] WAN Jia-fu, ZHANG Da-qiang, ZHAO Sheng-jie, et al. Context-aware vehicular cyber-physical systems with cloud support: architecture, challenges, and solutions[J]. IEEE Communications Magazine, 2014, 52(8): 106-113. doi: 10.1109/MCOM.2014.6871677 [64] 张扬, 彭国雄, 杨晓光. 日本ITS发展现状及趋势[J]. 中外公路, 2003, 23(3): 8-10. doi: 10.3969/j.issn.1671-2579.2003.03.003ZHANG Yang, PENG Guo-xiong, YANG Xiao-guang. Present situation and trend of ITS development in Japan[J]. Journal of China and Foreign Highway, 2003, 23(3): 8-10. (in Chinese) doi: 10.3969/j.issn.1671-2579.2003.03.003 [65] 袁君. 基于数据挖掘技术的驾驶行为评分模型设计[J]. 信息记录材料, 2020, 21(10): 153-155.YUAN Jun. Design of driving behavior scoring model based on data mining technology[J]. Information Recording Materials, 2020, 21(10): 153-155. (in Chinese) [66] 张正. 基于车联网驾驶行为评分的安全驾驶卫士分析与设计[D]. 南京: 南京邮电大学, 2017.ZHANG Zheng. The analysis and design of driving safety guards based on the score of driving behavior in vehicle networking[D]. Nanjing: Nanjing University of Posts and Telecommunications, 2017. (in Chinese) [67] 朱爽. 车联网环境下基于UBI的车险费率厘定模式与方法研究[D]. 北京: 北京交通大学, 2015.ZHU Shuang. Research on the automobile insurance ratemaking mode and method based on UBI in the internet of vehicle[D]. Beijing: Beijing Jiaotong University, 2015. (in Chinese) [68] JIANG Xian-tao, YU F R, SONG Tian, et al. Intelligent resource allocation for video analytics in blockchain-enabled internet of autonomous vehicles with edge computing[J]. IEEE Internet of Things Journal, 2022, 9(16): 14260-14272. doi: 10.1109/JIOT.2020.3026354 [69] ZHU Feng-hua, LYU Yi-sheng, CHEN Yuan-yuan, et al. Parallel transportation systems: toward IoT-enabled smart urban traffic control and management[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(10): 4063-4071. doi: 10.1109/TITS.2019.2934991 [70] WANG Zi-ran, LIAO Xi-shun, ZHAO Xuan-peng, et al. A digital twin paradigm: vehicle-to-cloud based advanced driver assistance systems[C]//IEEE. 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring). New York: IEEE, 2020: 1-6. [71] ASAM. Project types: learn which project types are available at ASAM[EB/OL]. (2023-03-21)[2023-04-01]. https://www.asam.net/active-projects/project-types .[72] ASAM. Development process: learn how ASAM standards are developed[EB/OL]. (2023-03-21)[2023-04-01]. https://www.asam.net/active-projects/development-process .[73] 周博林, 张宗实, 陈蔯. ASAM OpenX与基于场景的自动驾驶仿真测试[J]. 标准科学, 2021(增1): 110-122.ZHOU Bo-lin, ZHANG Zong-shi, CHEN Chen. ASAM OpenX and scenario based simulation test for autonomous driving[J]. Standard Science, 2021(S1): 110-122. (in Chinese) [74] C-ASAM. ASAM标准项目类型[EB/OL]. (2022-03-29)[2022-11-03]. http://www.c-asam.net/?s=news-show-id-2.html .C-ASAM. The type of ASAM standard project[EB/OL]. (2022-03-29)[2022-11-03].http://www.c-asam.net/?s=news-show-id-2.html . (in Chinese)[75] LU Guang-quan, CHENG Bo, WANG Yun-peng, et al. A car-following model based on quantified homeostatic risk perception[J]. Mathematical Problems in Engineering, 2013, 2013: 408756. [76] YANG H H, PENG H. Development of an errorable car-following driver model[J]. Vehicle System Dynamics, 2010, 48(6): 751-773. doi: 10.1080/00423110903128524 [77] LINDORFER M, MECKLENBRÄUKER C F, OSTERMAYER G. Modeling the imperfect driver: incorporating human factors in a microscopic traffic model[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(9): 2856-2870. doi: 10.1109/TITS.2017.2765694 [78] CAI Jun-yu, JIANG Hao-bin, WANG Jun-yan. Implementation of the human-like lane changing driver model based on Bi-LSTM[J]. Discrete Dynamics in Nature and Society, 2022, 2022: 9934292. [79] JULKA S, SOWRIRAJAN V, SCHLOETTERER J, et al. Conditional generative adversarial networks for speed control in trajectory simulation[C]//Springer. 7th International Conference on Machine Learning, Optimization, and Data Science. Berlin: Springer, 2021: 436-450. [80] LIU Jian-bang, MAO Xin-yu, FANG Yu-qi, et al. A survey on deep-learning approaches for vehicle trajectory prediction in autonomous driving[C]//IEEE. 2021 IEEE International Conference on Robotics and Biomimetics (ROBIO). New York: IEEE, 2021: 978-985. [81] LIANG Ming, YANG Bin, HU Rui, et al. Learning lane graph representations for motion forecasting[C]//Springer. 16th European Conference on Computer Vision. Berlin: Springer, 2020: 541-556. [82] VARADARAJAN B, HEFNY A, SRIVASTAVA A, et al. Multipath + + : efficient information fusion and trajectory aggregation for behavior prediction[C]//ICRA. 2022 International Conference on Robotics and Automation (ICRA). New York: ICRA, 2022: 7814-7821. [83] ALBABA B M, YILDIZ Y. Driver modeling through deep reinforcement learning and behavioral game theory[J]. IEEE Transactions on Control Systems Technology, 2022, 30(2): 885-892. doi: 10.1109/TCST.2021.3075557 [84] SUN Ruo-yu, HU Shao-chi, ZHAO Hui-jing, et al. Human-like highway trajectory modeling based on inverse reinforcement learning[C]//IEEE. 2019 IEEE Intelligent Transportation Systems Conference (ITSC). New York: IEEE, 2019: 1482-1489. [85] HUANG Zhi-yu, WU Jing-da, LYU Chen. Driving behavior modeling using naturalistic human driving data with inverse reinforcement learning[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(8): 10239-10251. doi: 10.1109/TITS.2021.3088935 [86] SUN Jian, ZHANG He, ZHOU Hua-jun, et al. Scenario-based test automation for highly automated vehicles: a review and paving the way for systematic safety assurance[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(9): 14088-14103. doi: 10.1109/TITS.2021.3136353 [87] ALTHOFF M, KOSCHI M, MANZINGER S. Common road: composable benchmarks for motion planning on roads[C]// IEEE. 2017 IEEE Intelligent Vehicles Symposium (Ⅳ). New York: IEEE, 2017: 719-726. [88] SHAH S, DEY D, LOVETT C, et al. Airsim: high-fidelity visual and physical simulation for autonomous vehicles[C]//Springer. Field and Service Robotics: Results of the 11th International Conference. Berlin: Springer, 2018: 621-635. [89] CARLA. Carla simulator[EB/OL]. (2022-09-12)[2022-11-03]. https://carla.readthedocs.io/en/latest .[90] FAN Hao-yang, ZHU Fan, LIU Chang-chun, et al. Baidu apollo em motion planner[J]. arXiv, 2018, DOI: 1807.08048 .[91] BENEKOHAL R F, TREITERER J. CARSIM. Car-following model for simulation of traffic in normal and stop-and-go conditions[J]. Transportation Research Record, 1988, 1194: 99-111. [92] Siemens. Simcenter prescan software[EB/OL]. (2022-09-21) [2022-11-03]. https://plm.sw.siemens.com/en-US/simcenter/autonomous-vehicle-solutions/prescan/ .[93] QI Xiao, NI Ying, XU Yi-ming, et al. Autonomous vehicles' car-following drivability evaluation based on driving behavior spectrum reference model[J]. Transportation Research Record: Journal of the Transportation Research Board, 2021, 2675(7): 129-141. doi: 10.1177/0361198121994857 [94] SONG Zhi-jin, WANG Hui-zi, SUN Jian, et al. Experimental findings with VISSIM and TransModeler for evaluating environmental and safety impacts using micro-simulations[J]. Transportation Research Record: Journal of the Transportation Research Board, 2020, 2674(8): 566-580. doi: 10.1177/0361198120925077 [95] MA Zi-an, SUN Jian, WANG Yun-peng. A two-dimensional simulation model for modelling turning vehicles at mixed-flow intersections[J]. Transportation Research Part C: Emerging Technologies, 2017, 75: 103-119. doi: 10.1016/j.trc.2016.12.005 [96] MA Zi-an, XIE Jian-bo, QI Xiao, et al. Two-dimensional simulation of turning behavior in potential conflict area of mixed-flow intersections[J]. Computer-Aided Civil and Infrastructure Engineering, 2017, 32(5): 412-428. doi: 10.1111/mice.12266 [97] XU Yi-ming, MA Zi-an, SUN Jian. Simulation of turning vehicles' behaviors at mixed-flow intersections based on potential field theory[J]. Transportmetrica B: Transport Dynamics, 2019, 7(1): 498-518. doi: 10.1080/21680566.2018.1447407 [98] SUN Jian, LIU Han, MA Zi-an. Modelling and simulation of highly mixed traffic flow on two-lane two-way urban streets[J]. Simulation Modelling Practice and Theory, 2019, 95: 16-35. doi: 10.1016/j.simpat.2019.04.005 [99] BERGAMINI L, YE Ya-wei, SCHEEL O, et al. SimNet: learning reactive self-driving simulations from real-world observations[C]//IEEE. 2021 IEEE International Conference on Robotics and Automation (ICRA). New York: IEEE, 2021: 5119-5125. [100] YAN Xin-tao, ZOU Zheng-xia, FENG Shuo, et al. Learning naturalistic driving environment with statistical realism[J]. Nature Communications, 2023, 14: 2037. doi: 10.1038/s41467-023-37677-5 [101] ZHAO Ding, HUANG Xia-nan, PENG Hu-ei, et al. Accelerated evaluation of automated vehicles in car-following maneuvers[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(3): 733-744. doi: 10.1109/TITS.2017.2701846 [102] FENG Shuo, FENG Yi-heng, YU Chun-hui, et al. Testing scenario library generation for connected and automated vehicles, part Ⅰ: methodology[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(3): 1573-1582. doi: 10.1109/TITS.2020.2972211 [103] SUN Jian, ZHOU Hua-jun, XI Hao-chen, et al. Adaptive design of experiments for safety evaluation of automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(9): 14497-14508. doi: 10.1109/TITS.2021.3130040 [104] DING Wen-hao, CHEN Bai-ming, LI Bo, et al. Multimodal safety-critical scenarios generation for decision-making algorithms evaluation[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 1551-1558. doi: 10.1109/LRA.2021.3058873 [105] 邓伟文, 李江坤, 任秉韬, 等. 面向自动驾驶的仿真场景自动生成方法综述[J]. 中国公路学报, 2022, 35(1): 316-333. doi: 10.3969/j.issn.1001-7372.2022.01.027DENG Wei-wen, LI Jiang-kun, REN Bing-tao, et al. A survey on automatic simulation scenario generation methods for autonomous driving[J]. China Journal of Highway and Transport, 2022, 35(1): 316-333. (in Chinese) doi: 10.3969/j.issn.1001-7372.2022.01.027 [106] 陈吉清, 舒孝雄, 兰凤崇, 等. 典型危险事故特征的自动驾驶测试场景构建[J]. 华南理工大学学报(自然科学版), 2021, 49(5): 1-8.CHEN Ji-qing, SHU Xiao-xiong, LAN Feng-chong, et al. Construction of autonomous vehicles test scenarios with typical dangerous accident characteristics[J]. Journal of South China University of Technology (Natural Science Edition), 2021, 49(5): 1-8. (in Chinese) [107] 王润民, 朱宇, 赵祥模, 等. 自动驾驶测试场景研究进展[J]. 交通运输工程学报, 2021, 21(2): 21-37. doi: 10.19818/j.cnki.1671-1637.2021.02.003WANG Run-min, ZHU Yu, ZHAO Xiang-mo, et al. Research progress on test scenario of autonomous driving[J]. Journal of Traffic and Transportation Engineering, 2021, 21(2): 21-37. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2021.02.003 [108] 朱冰, 张培兴, 赵健. 面向多维度逻辑场景的自动驾驶安全性聚类评价方法[J]. 汽车工程, 2020, 42(11): 1458-1463, 1505.ZHU Bing, ZHANG Pei-xing, ZHAO Jian. Clustering evaluation method of autonomous driving safety for multi-dimensional logical scenario[J]. Automotive Engineering, 2020, 42(11): 1458-1463, 1505. (in Chinese) [109] MENZEL T, BAGSCHIK G, MAURER M. Scenarios for development, test and validation of automated vehicles[C]//IEEE. 2018 IEEE Intelligent Vehicles Symposium (Ⅳ). New York: IEEE, 2018: 1821-1827. [110] DING Wen-hao, LI Bo, EUN K J, et al. Semantically controllable scene generation with guidance of explicit knowledge[J]. arXiv, 2021, DOI: 2106.04066 .[111] JESENSKI S, STELLET J E, SCHIEGG F, et al. Generation of scenes in intersections for the validation of highly automated driving functions[C]//IEEE. 2019 IEEE Intelligent Vehicles Symposium (Ⅳ). New York: IEEE, 2019: 502-509. [112] 周文帅, 朱宇, 赵祥模, 等. 面向高速公路车辆切入场景的自动驾驶测试用例生成方法[J]. 汽车技术, 2021(1): 11-18.ZHOU Wen-shuai, ZHU Yu, ZHAO Xiang-mo, et al. Vehicle cut-in test case generation methods for testing of autonomous driving on highway[J]. Automobile Technology, 2021(1): 11-18. (in Chinese) [113] 朱宇, 赵祥模, 徐志刚, 等. 基于蒙特卡洛模拟的无人车高速公路变道虚拟测试场景自动生成算法[J]. 中国公路学报, 2022, 35(3): 89-100.ZHU Yu, ZHAO Xiang-mo, XU Zhi-gang, et al. Automatic generation algorithm of lane-change virtual test scenario on highways for automated vehicles using Monte Carlo simulation[J]. China Journal of Highway and Transport, 2022, 35(3): 89-100. (in Chinese) [114] DING Wen-hao, CHEN Bai-ming, XU Min-jun, et al. Learning to collide: an adaptive safety-critical scenarios generating method[C]//IEEE. 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). New York: IEEE, 2020: 2243-2250. [115] CHOI S, KIM J, YEO H. TrajGAIL: generating urban vehicle trajectories using generative adversarial imitation learning[J]. Transportation Research Part C: Emerging Technologies, 2021, 128: 103091. doi: 10.1016/j.trc.2021.103091 [116] 赵祥模, 赵玉钰, 景首才, 等. 面向自动驾驶测试的危险变道场景泛化生成[J]. 自动化学报, 2023, 49(10): 2211-2223.ZHAO Xiang-mo, ZHAO Yu-yu, JING Shou-cai, et al. Generalization generation of hazardous lane-changing scenarios for automated vehicle testing[J]. Acta Automatica Sinica, 2023, 49(10): 2211-2223. (in Chinese) [117] 余荣杰, 田野, 孙剑. 高等级自动驾驶汽车虚拟测试: 研究进展与前沿[J]. 中国公路学报, 2020, 33(11): 125-138. doi: 10.3969/j.issn.1001-7372.2020.11.012YU Rong-jie, TIAN Ye, SUN Jian. Highly automated vehicle virtual testing: a review of recent developments and research frontiers[J]. China Journal of Highway and Transport, 2020, 33(11): 125-138. (in Chinese) doi: 10.3969/j.issn.1001-7372.2020.11.012 [118] 朱冰, 范天昕, 赵健, 等. 基于危险边界搜索的自动驾驶系统加速测试方法[J]. 吉林大学学报(工学版), 2023, 53(3): 704-712.ZHU Bing, FAN Tian-xin, ZHAO Jian, et al. Accelerate test method of automated driving system based on hazardous boundary search[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(3): 704-712. (in Chinese) [119] SAEED A, AB HAMID S H, MUSTAFA M B. The experimental applications of search-based techniques for model-based testing: taxonomy and systematic literature review[J]. Applied Soft Computing, 2016, 49: 1094-1117. doi: 10.1016/j.asoc.2016.08.030 [120] MULLINS G E, STANKIEWICZ P G, HAWTHORNE R C, et al. Adaptive generation of challenging scenarios for testing and evaluation of autonomous vehicles[J]. Journal of Systems and Software, 2018, 137: 197-215. doi: 10.1016/j.jss.2017.10.031 [121] XU Yi-ming, Zou Ya-jie, SUN Jian. Accelerated testing for automated vehicles safety evaluation in cut-in scenarios based on importance sampling, genetic algorithm and simulation applications[J]. Journal of Intelligent and Connected Vehicles, 2018, 1(1): 28-38. doi: 10.1108/JICV-01-2018-0002 [122] ZHAO Ding, LAM H, PENG Hu-ei, et al. Accelerated evaluation of automated vehicles safety in lane-change scenarios based on importance sampling techniques[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(3): 595-607. doi: 10.1109/TITS.2016.2582208 [123] HUANG Zhi-yuan, LAM H, LEBLANC D J, et al. Accelerated evaluation of automated vehicles using piecewise mixture models[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(9): 2845-2855. doi: 10.1109/TITS.2017.2766172 [124] HUANG Zhi-yuan, LAM H, ZHAO Ding. An accelerated testing approach for automated vehicles with background traffic described by joint distributions[C]//IEEE. 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC). New York: IEEE, 2017: 933-938. [125] ZHANG He, SUN Jian, TIAN Ye. Accelerated testing for highly automated vehicles: a combined method based on importance sampling and normalizing flows[C]//IEEE. 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC). New York: IEEE, 2022: 574-579. [126] WANG Xin-peng, PENG Hu-ei, ZHANG Song-an, et al. An interaction-aware evaluation method for highly automated vehicles[C]//IEEE. 2021 IEEE International Intelligent Transportation Systems Conference (ITSC). New York: IEEE, 2021: 394-401. [127] TUNCALI C E, FAINEKOS G. Rapidly-exploring random trees for testing automated vehicles[C]//IEEE. 2019 IEEE Intelligent Transportation Systems Conference (ITSC). NewYork: IEEE, 2019: 661-666. [128] KIM Y, TAY S, GUANETTI J, et al. Hardware-in-the-loop for connected automated vehicles testing in real traffic[J]. arXiv, 2019, DOI: 1907.09052 .[129] FENG Shuo, YAN Xin-tao, SUN Hao-wei, et al. Intelligent driving intelligence test for autonomous vehicles with naturalistic and adversarial environment[J]. Nature Communications, 2021, 12: 748. doi: 10.1038/s41467-021-21007-8 [130] ROCKLAGE E, KRAFT H, KARATAS A, et al. Automated scenario generation for regression testing of autonomous vehicles[C]//IEEE. 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC). New York: IEEE, 2017: 476-483. [131] AMERSBACH C, WINNER H. Defining required and feasible test coverage for scenario-based validation of highly automated vehicles[C]//IEEE. 2019 IEEE Intelligent Transportation Systems Conference (ITSC). New York: IEEE, 2019: 425-430. [132] SHAFTO M, CONROY M, DOYLE R, et al. Modeling, simulation, information technology and processing roadmap[J]. National Aeronautics and Space Administration, 2010, 11: 1-32. [133] 刘大同, 郭凯, 王本宽, 等. 数字孪生技术综述与展望[J]. 仪器仪表学报, 2018, 39(11): 1-10.LIU Da-tong, GUO Kai, WANG Ben-kuan, et al. Summary and perspective survey on digital twin technology[J]. Chinese Journal of Scientific Instrument, 2018, 39(11): 1-10. (in Chinese) [134] QI Qing-lin, TAO Fei. Digital twin and big data towards smart manufacturing and industry 4.0: 360 degree comparison[J]. IEEE Access, 2018, 6: 3585-3593. doi: 10.1109/ACCESS.2018.2793265 [135] LIAO Xi-shun, WANG Zi-ran, ZHAO Xuan-peng, et al. Cooperative ramp merging design and field implementation: a digital twin approach based on vehicle-to-cloud communication[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(5): 4490-4500. doi: 10.1109/TITS.2020.3045123 [136] SCHROEDER G, STEINMETZ C, PEREIRA C E, et al. Visualising the digital twin using web services and augmented reality[C]//IEEE. 2016 IEEE 14th International Conference on Industrial Informatics (INDIN). New York: IEEE, 2016: 522-527. [137] WANG Zi-ran, WU Guo-yuan, BORIBOONSOMSIN K, et al. Cooperative ramp merging system: agent-based modeling and simulation using game engine[J]. SAE International Journal of Connected and Automated Vehicles, 2019, 2(2): 115-128. [138] CHEN Qi, WANG Xu-gang, YANG Jing, et al. Trajectory-following guidance based on a virtual target and an angle constraint[J]. Aerospace Science and Technology, 2019, 87: 448-458. doi: 10.1016/j.ast.2019.02.034 [139] YANG Chun-ying, DONG Jiang-hong, XU Qing, et al. Multi-vehicle experiment platform: a digital twin realization method[C]//IEEE. 2022 IEEE/SICE International Symposium on System Integration (SⅡ). New York: IEEE, 2022: 705-711. [140] NIAZ A, SHOUKAT M U, JIA Yan-bing, et al. Autonomous driving test method based on digital twin: a survey[C]// IEEE. 2021 International Conference on Computing, Electronic and Electrical Engineering (ICE Cube). New York: IEEE, 2021: 1-7. [141] HETZER D, MUEHLEISEN M, KOUSARIDAS A, et al. 5G connected and automated driving: use cases and technologies in cross-border environments[C]//IEEE. 2019 European Conference on Networks and Communications (EuCNC). New York: IEEE, 2019: 78-82. [142] ZHAO Ding, PENG Hu-ei. From the lab to the street: Solving the challenge of accelerating automated vehicle testing[J]. arXiv, 2017, DOI: 1707.04792 .[143] HUANG Wu-ling, WANG Kun-feng, LYU Yi-sheng, et al. Autonomous vehicles testing methods review[C]//IEEE. 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC). New York: IEEE, 2016: 163-168. [144] GE Yu-ming, WANG Yang, YU Run-dong, et al. Demo: research on test method of autonomous driving based on digital twin[C]//IEEE. 2019 IEEE Vehicular Networking Conference (VNC). New York: IEEE, 2019: 1-2. [145] SZALAY Z, FICZERE D, TIHANYI V, et al. 5G-enabled autonomous driving demonstration with a V2X scenario-in-the-loop approach[J]. Sensors (Basel), 2020, 20(24): 7344. doi: 10.3390/s20247344 [146] LI Li, WANG Xiao, WANG Kun-feng, et al. Parallel testing of vehicle intelligence via virtual-real interaction[J]. Science Robotics, 2019, 4(28): eaaw4106. doi: 10.1126/scirobotics.aaw4106 [147] VERHOEFF L, VERBURG D J, LUPKER H A, et al. VEHIL: a full-scale test methodology for intelligent transport systems, vehicles and subsystems[C]//IEEE. Proceedings of the IEEE Intelligent Vehicles Symposium 2000. New York: IEEE, 2002: 369-375. [148] BOCK T, SIEDERSBERGER K H, MAURER M. Vehicle in the loop-augmented reality application for collision mitigation systems[C]//IEEE. Fourth IEEE and ACM International Symposium on Mixed and Augmented Reality (ISMAR'05). New York: IEEE, 2005: 1-9. [149] MIQUET C. New test method for reproducible real-time tests of ADAS ECUs: "Vehicle-in-the-Loop" connects real-world vehicles with the virtual world[C]//Springer. 5th International Munich Chassis Symposium 2014. Berlin: Springer, 2014: 575-589. [150] PFEFFER R, LEICHSENRING T. Continuous development of highly automated driving functions with vehicle-in-the-loop using the example of Euro NCAP scenarios[C]//Springer. Simulation and Testing for Vehicle Technology: 7th Conference. Berlin: Springer, 2016: 33-42. [151] PARK C, CHUNG S, LEE H. Vehicle-in-the-loop in global coordinates for advanced driver assistance system[J]. Applied Sciences, 2020, 10(8): 2645. doi: 10.3390/app10082645 [152] FAYAZI S A, VAHIDI A, LUCKOW A. A Vehicle-in-the-Loop (VIL) verification of an all-autonomous intersection control scheme[J]. Transportation Research Part C: Emerging Technologies, 2019, 107: 193-210. doi: 10.1016/j.trc.2019.07.027 [153] ITIC. International Transportation Innovation Center[EB/OL]. (2013-09-20)[2022-11-03]. http://www.itic-sc.com .[154] TETTAMANTI T, SZALAI M, VASS S, et al. Vehicle-in-the-loop test environment for autonomous driving with microscopic traffic simulation[C]//IEEE. 2018 IEEE International Conference on Vehicular Electronics and Safety (ICVES). New York: IEEE, 2018: 1-6. [155] GRIGGS W, ORDÓNEZ-HURTADO R, RUSSO G, et al. Control Strategies for Advanced Driver Assistance Systems and Autonomous Driving Functions: Development, Testing and Verification[M]. Berlin: Springer, 2018. [156] SOLMAZ S, HOLZINGER F, MISCHINGER M, et al. Towards Connected and Autonomous Vehicle Highways: Technical, Security and Social Challenges[M]. Berlin: Springer, 2020. [157] ARD T, GUO Long-xiang, DOLLAR R A, et al. Energy and flow effects of optimal automated driving in mixed traffic: vehicle-in-the-loop experimental results[J]. Transportation Research Part C: Emerging Technologies, 2021, 130: 103168. doi: 10.1016/j.trc.2021.103168 [158] GIETELINK O, PLOEG J, DE SCHUTTER B, et al. VEHIL: a test facility for validation of fault management systems for advanced driver assistance systems[J]. IFAC Proceedings Volumes, 2004, 37(22): 397-402. doi: 10.1016/S1474-6670(17)30376-2 [159] ALBERS A, DVSER T. A new process for configuration and application of complex validation environments using the example of vehicle-in-the-loop at the roller test bench[C]//ASME. Proceedings of the ASME 2010 International Mechanical Engineering Congress and Exposition. New York: ASME, 2010: 807-816. [160] GALKO C, ROSSI R, SAVATIER X. Vehicle-hardware-in-the-loop system for ADAS prototyping and validation[C]//IEEE. 2014 International Conference on Embedded Computer Systems: Architectures, Modeling, and Simulation (SAMOS XIV). New York: IEEE, 2014: 329-334. [161] VERBURG D J, VAN DER KNAAP A C M, PLOEG J. VEHIL: developing and testing intelligent vehicles[C]//IEEE. 2002 Intelligent Vehicle Symposium. New York: IEEE, 2002: 537-544. [162] MITSCHKE M, WALLENTOWITZ H. Dynamik der Kraftfahrzeuge[M]. Berlin: Springer, 1972. [163] PACEJKA H B, BESSELINK I J M. Magic formula tyre model with transient properties[J]. Vehicle System Dynamics, 1997, 27(S1): 234-249. [164] Dürr Group. X-road-curve dynamically tests autonomous cars[EB/OL]. (2018-04-11)[2022-11-03]. https://www.durr-group.com/en/duerrmore/autonomous-driving .[165] SOLMAZ S, RUDIGIER M, MISCHINGER M. A vehicle-in-the-loop methodology for evaluating automated driving functions in virtual traffic[C]//IEEE. 2020 IEEE Intelligent Vehicles Symposium (Ⅳ). New York: IEEE, 2020: 1465-1471. [166] 赵祥模, 承靖钧, 徐志刚, 等. 基于整车在环仿真的自动驾驶汽车室内快速测试平台[J]. 中国公路学报, 2019, 32(6): 124-136.ZHAO Xiang-mo, CHENG Jing-jun, XU Zhi-gang, et al. An indoor rapid-testing platform for autonomous vehicle based on vehicle-in-the-loop simulation[J]. China Journal of Highway and Transport, 2019, 32(6): 124-136. (in Chinese) [167] DIEWALD A, KURZ C, KANNAN P V, et al. Radar target simulation for vehicle-in-the-loop testing[J]. Vehicles, 2021, 3(2): 257-271. doi: 10.3390/vehicles3020016 [168] SCHYR C, BRISSARD A. Driving cube-a novel concept for validation of powertrain and steering systems with automated driving[C]//CRC Press. In Proceedings of the 13th International Symposium on Advanced Vehicle Control (AVEC'16). Boca Raton: CRC Press, 2016: 79-84. [169] LI He-xuan, NALIC D, MAKKAPATI V, et al. A real-time co-simulation framework for virtual test and validation on a high dynamic vehicle test bed[C]//IEEE. 2021 IEEE Intelligent Vehicles Symposium (Ⅳ). New York: IEEE, 2021: 1132-1137. [170] VAN BRUMMELEN J, O'BRIEN M, GRUYER D, et al. Autonomous vehicle perception: the technology of today and tomorrow[J]. Transportation Research Part C: Emerging Technologies, 2018, 89: 384-406. doi: 10.1016/j.trc.2018.02.012 [171] WANG Xiao-gang. Intelligent multi-camera video surveillance: a review[J]. Pattern Recognition Letters, 2013, 34(1): 3-19. doi: 10.1016/j.patrec.2012.07.005 [172] HASCH J, TOPAK E, SCHNABEL R, et al. Millimeter-wave technology for automotive radar sensors in the 77 GHz frequency band[J]. IEEE Transactions on Microwave Theory and Techniques, 2012, 60(3): 845-860. doi: 10.1109/TMTT.2011.2178427 [173] 王文威. 基于转鼓平台的智能汽车整车在环加速测试研究与实现[D]. 西安: 长安大学, 2020.WANG Wen-wei. Research and implementation of drum-based intelligent vehicle-in-the-loop accelerated evaluation[D]. Xi'an: Chang'an University, 2020. (in Chinese) [174] 于洪峰, 王裕鹏, 华典, 等. 基于摄像头在环的HIL仿真测试与研究[J]. 汽车电器, 2019(12): 4-7.YU Hong-feng, WANG Yu-peng, HUA Dian, et al. Camera ADAS HIL simulation and study[J]. Automobile Electric Parts, 2019(12): 4-7. (in Chinese) [175] ZHOU Hai-bo, XU Wen-chao, CHEN Jia-cheng, et al. Evolutionary V2X technologies toward the Internet of vehicles: challenges and opportunities[J]. Proceedings of the IEEE, 2020, 108(2): 308-323. doi: 10.1109/JPROC.2019.2961937 [176] 刘天洋, 余卓平, 熊璐, 等. 智能网联汽车试验场发展现状与建设建议[J]. 汽车技术, 2017(1): 7-11, 32. doi: 10.3969/j.issn.1000-3703.2017.01.002LIU Tian-yang, YU Zhuo-ping, XIONG Lu, et al. Current development status and construction advice for proving ground of intelligent and connected vehicles[J]. Automobile Technology, 2017(1): 7-11, 32. (in Chinese) doi: 10.3969/j.issn.1000-3703.2017.01.002 [177] 李骁驰, 赵祥模, 徐志刚, 等. 面向智能网联交通系统的模块化柔性试验场[J]. 中国公路学报, 2019, 32(6): 137-146.LI Xiao-chi, ZHAO Xiang-mo, XU Zhi-gang, et al. Modular flexible test bed for intelligent and connected transportation system[J]. China Journal of Highway and Transport, 2019, 32(6): 137-146. (in Chinese) [178] DUAN Xu-ting, YANG Yue, TIAN Da-xin, et al. A V2X communication system and its performance evaluation test bed[C]// IEEE. 2014 IEEE 6th International Symposium on Wireless Vehicular Communications (WiVeC 2014). New York: IEEE, 2014: 1-2. [179] SHI Meng-kai, LU Chang, ZHANG Yi, et al. DSRC and LTE-V communication performance evaluation and improvement based on typical V2X application at intersection[C]//IEEE. 2017 Chinese Automation Congress (CAC). New York: IEEE, 2017: 556-561. [180] 陈子轩, 马万经, 郝若辰, 等. 面向智能网联车的硬件在环仿真平台[C]//中国智能交通年会学术委员会. 第十三届中国智能交通年会大会论文集. 北京: 中国智能交通年会学术委员会, 2018: 54-63.CHEN Zi-xuan, MA Wan-jing, HAO Ruo-chen, et al. Hardware-in-the-loop simulation testbed for intelligent and connected vehicle[C]//Technical Committee on Annual Conference of ITS China. The 13th Annual Conference of ITS China. Beijing: Technical Committee on Annual Conference of ITS China, 2018: 54-63. (in Chinese) [181] 王润民, 张心睿, 王由道, 等. 自动驾驶封闭测试场地建设技术研究与实践[J]. 汽车实用技术, 2020(4): 33-36.WANG Run-min, ZHANG Xin-rui, WANG You-dao, et al. Research and practice on construction technology of closed test field autonomous driving[J]. Automobile Applied Technology, 2020(4): 33-36. (in Chinese) [182] 乔冠栋. BIM技术在城市道路设计中的优势与应用研究[J]. 工程建设与设计, 2023(4): 91-93.QIAO Guan-dong. Research on advantages and application of BIM technology in urban road design[J]. Construction and Design for Engineering, 2023(4): 91-93. (in Chinese) [183] 鲍秀之, 陈新望, 卢明岳. 建筑物真三维图形的摄影测量方法[J]. 铁路航测, 1996(3): 1-4.BAO Xiu-zhi, CHEN Xin-wang, LU Ming-yue. Photogrammetric methods for real three-dimensional graphics of buildings[J]. Railway Investigation and Surveying, 1996(3): 1-4. (in Chinese) [184] THORN E, KIMMEL S C, CHAKA M, et al. A framework for automated driving system testable cases and scenarios[R]. Washington DC: National Highway Traffic Safety Administration, 2018. [185] ZACHMAN J A. A framework for information systems architecture[J]. IBM Systems Journal, 1987, 26(3): 276-292. doi: 10.1147/sj.263.0276 [186] SPEWAK S H, HILL S C. Enterprise Architecture Planning: Developing a Blueprint for Data, Applications and Technology[M]. Boston: QED Pub. Group, 1993. [187] CHETAL A. Federal enterprise architecture[J]. Alphascript Publishing, 2002, 46(4): 258-274. [188] LAGERSTRÖM R, SOMMESTAD T, BUSCHLE M, et al. Enterprise architecture management's impact on information technology success[C]// IEEE. 2011 44th Hawaii International Conference on System Sciences. New York: IEEE, 2011: 1-10. [189] SIMON G A. DoD (department of defense) protocol reference model[R]. Santa Monica: System Development Corporation, 1982. [190] WOOD W G, BARBACCI M, CLEMENTS P, et al. DoD architecture framework and software architecture workshop report[R]. Pittsburgh: Software Engineering Institute of Carnegie Mellon University, 2003. [191] 孙雨生, 刘林, 薛彤. IT规划参考模型比较研究[J]. 计算机与数字工程, 2019, 47(11): 2771-2779, 2823. doi: 10.3969/j.issn.1672-9722.2019.11.026SUN Yu-sheng, LIU Lin, XUE Tong. Comparative research on IT planning reference model[J]. Computer and Digital Engineering, 2019, 47(11): 2771-2779, 2823. (in Chinese) doi: 10.3969/j.issn.1672-9722.2019.11.026 [192] 冷丙波. 基于EA的汽车制造行业信息系统集成应用研究[D]. 沈阳: 沈阳师范大学, 2013.LENG Bing-bo. The automobile manufacturing industry information system integration application research based on EA[D]. Shenyang: Shenyang Normal University, 2013. (in Chinese) [193] 赵祥模, 高赢, 徐志刚, 等. IntelliWay-变耦合模块化智慧高速公路系统一体化架构及测评体系[J]. 中国公路学报, 2023, 36(1): 176-201. doi: 10.3969/j.issn.1001-7372.2023.01.015ZHAO Xiang-mo, GAO Ying, XU Zhi-gang, et al. IntelliWay: an integrated architecture and testing methodology for intelligent highway using varied coupling modularization[J]. China Journal of Highway and Transport, 2023, 36(1): 176-201. (in Chinese) doi: 10.3969/j.issn.1001-7372.2023.01.015 [194] 王潇屹, 李俊成, 马雪寒. 自动驾驶汽车感知系统测试用例构建方法研究[J]. 质量与标准化, 2022(1): 51-54.WANG Xiao-yi, LI Jun-cheng, MA Xue-han. Research on test case construction method of autonomous vehicle perception system[J]. Quality and Standardization, 2022(1): 51-54. (in Chinese) [195] XIA Qin, DUAN Jian-li, GAO Feng, et al. Test scenario design for intelligent driving system ensuring coverage and effectiveness[J]. International Journal of Automotive Technology, 2018, 19(4): 751-758. doi: 10.1007/s12239-018-0072-6 [196] ZOFKA M R, KUHNT F, KOHLHAAS R, et al. Data-driven simulation and parametrization of traffic scenarios for the development of advanced driver assistance systems[C]//IEEE. 2015 18th International Conference on Information Fusion (Fusion). New York: IEEE, 2015: 1422-1428. [197] 安泽萍, 贺静, 姚翔林. 高速公路智能车路协同系统应用场景库构建研究[J]. 公路, 2021, 66(12): 270-274.AN Ze-ping, HE Jing, YAO Xiang-lin. Research on the construction of expressway intelligent vehicle infrastructure cooperative systems application scenario library[J]. Highway, 2021, 66(12): 270-274. (in Chinese) [198] 马亚芳, 王文杰, 顾可, 等. 智能网联汽车自动驾驶功能测试分析[J]. 时代汽车, 2021(23): 38-39, 46. doi: 10.3969/j.issn.1672-9668.2021.23.017MA Ya-fang, WANG Wen-jie, GU Ke, et al. Test and analysis of autonomous driving function of intelligent and connected vehicles[J]. Auto Time, 2021(23): 38-39, 46. (in Chinese) doi: 10.3969/j.issn.1672-9668.2021.23.017 [199] 刘新. 工信部: 规范智能网联汽车道路测试与示范应用[J]. 中国设备工程, 2021(16): 1.LIU Xin. Ministry of industry and information technology: standardizing intelligent networked vehicle road test and demonstration application[J]. China Plant Engineering, 2021(16): 1. (in Chinese) [200] LI Li, HUANG Wu-ling, LIU Yue-hu, et al. Intelligence testing for autonomous vehicles: a new approach[J]. IEEE Transactions on Intelligent Vehicles, 2016, 1(2): 158-166. doi: 10.1109/TIV.2016.2608003 [201] LI Li, LIN Yi-lun, ZHENG Nan-ning, et al. Artificial intelligence test: a case study of intelligent vehicles[J]. Artificial Intelligence Review, 2018, 50(3): 441-465. doi: 10.1007/s10462-018-9631-5 [202] WOOLDRIDGE M, JENNINGS N R. Intelligent agents: theory and practice[J]. The Knowledge Engineering Review, 1995, 10(2): 115-152. doi: 10.1017/S0269888900008122 [203] HUANG Hui-ming, PAVEK K, NOVAK B, et al. A framework for autonomy levels for unmanned systems (ALFUS)[C]//AUVSI. Proceedings of the AUVSI's unmanned systems North America. New York: AUVSI, 2005: 849-863. [204] NAGAI M S, INOUE H. Research into ADAS with autonomous driving intelligence for future innovation[C]//Springer. 5th International Munich Chassis Symposium 2014. Berlin: Springer, 2014: 779-793. [205] PAYALAN Y F, GUVENSAN M A. Towards next-generation vehicles featuring the vehicle intelligence[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(1): 30-47. doi: 10.1109/TITS.2019.2917866 [206] WU Xin-zheng, XING Xing-yu, CHEN Jun-yi, et al. Risk assessment method for driving scenarios of autonomous vehicles based on drivable area[C]//IEEE. 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC). New York: IEEE, 2022: 2206-2213. [207] 蒙昊蓝, 陈君毅, 王斌, 等. 车辆行驶行为的负性刺激对乘员预期的影响[J]. 同济大学学报(自然科学版), 2022, 50(5): 759-766.MENG Hao-lan, CHEN Jun-yi, WANG Bin, et al. Effect of negative stimulus caused by vehicle maneuver on passenger's expectation[J]. Journal of Tongji University (Natural Science), 2022, 50(5): 759-766. (in Chinese) [208] BELLEM H, THIEL B, SCHRAUF M, et al. Comfort in automated driving: an analysis of preferences for different automated driving styles and their dependence on personality traits[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2018, 55: 90-100. doi: 10.1016/j.trf.2018.02.036 [209] MA Yi-ning, SUN Chen, CHEN Jun-yi, et al. Verification and validation methods for decision-making and planning of automated vehicles: a review[J]. IEEE Transactions on Intelligent Vehicles, 2022, 7(3): 480-498. doi: 10.1109/TIV.2022.3196396 [210] MENG Hao-lan, CHEN Jun-yi, FENG Tian-yue, et al. An interactive car-following model (ICFM) for the harmony-with-traffic evaluation of autonomous vehicles[C]//SAE International. 2023 WCX SAE World Congress Experience. Warrendale: SAE International, 2023: 01881765. [211] 朱西产, 魏昊舟, 马志雄. 基于自然驾驶数据的跟车场景潜在风险评估[J]. 中国公路学报, 2020, 33(4): 169-181. doi: 10.3969/j.issn.1001-7372.2020.04.017ZHU Xi-chan, WEI Hao-zhou, MA Zhi-xiong. Assessment of the potential risk in car-following scenario based on naturalistic driving data[J]. China Journal of Highway and Transport, 2020, 33(4): 169-181. (in Chinese) doi: 10.3969/j.issn.1001-7372.2020.04.017 [212] SHALEV-SHWARTZ S, SHAMMAH S, SHASHUA A. On a formal model of safe and scalable self-driving cars[J]. arxiv, 2017, DOI: 1708.06374 .[213] BAE I, MOON J, SEO J. Toward a comfortable driving experience for a self-driving shuttle bus[J]. Electronics, 2019, 8(9): 943. doi: 10.3390/electronics8090943 [214] TASHIRO M, MOTOYAMA H, ICHIOKA Y, et al. Simulation analysis on optimal merging control of connected vehicles for minimizing travel time[J]. International Journal of Intelligent Transportation Systems Research, 2020, 18(1): 65-76. doi: 10.1007/s13177-018-0172-8 [215] CHU K, LEE M, SUNWOO M. Local path planning for off-road autonomous driving with avoidance of static obstacles[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(4): 1599-1616. doi: 10.1109/TITS.2012.2198214 [216] CHAI Chen, ZENG Xian-ming, WU Xiang-bin, et al. Evaluation and optimization of responsibility-sensitive safety models on autonomous car-following maneuvers[J]. Transportation Research Record, 2020, 2674(11): 662-673. doi: 10.1177/0361198120948507 [217] CAO Peng, XU Zhan-dong, FAN Qiao-chu, et al. Analysing driving efficiency of mandatory lane change decision for autonomous vehicles[J]. IET Intelligent Transport Systems, 2019, 13(3): 506-514. doi: 10.1049/iet-its.2018.5253 [218] CHEN Bai-ming, CHEN Xiang, WU Qiong, et al. Adversarial evaluation of autonomous vehicles in lane-change scenarios[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(8): 10333-10342. doi: 10.1109/TITS.2021.3091477 [219] 蒙昊蓝, 陈君毅, 邢星宇, 等. 汽车乘员不舒适感的客观表征研究[J]. 同济大学学报(自然科学版), 2019, 47(增1): 54-63.MENG Hao-lan, CHEN Jun-yi, XING Xing-yu, et al. Study on objective representation of passenger discomfort[J]. Journal of Tongji University (Natural Science), 2019, 47(S1): 54-63. (in Chinese) [220] SUN Yang, XIONG Guang-ming, CHEN Hui-yan, et al. A cost function-oriented quantitative evaluation method for unmanned ground vehicles[J]. Advanced Materials Research, 2011, 301/302/303: 701-706. [221] SUN Yang, YANG He, MENG Fei. Research on an intelligent behavior evaluation system for unmanned ground vehicles[J]. Energies, 2018, 11(7): 1764. doi: 10.3390/en11071764 [222] PAN Ang, ZHANG Xin, IRYO-ASANO M, et al. Efficiency and safety evaluation of left-turn vehicles and crossing pedestrians in signalized intersections under the autonomous vehicle mixed flow condition[J]. International Journal of Intelligent Transportation Systems Research, 2022, 20(1): 103-116. doi: 10.1007/s13177-021-00276-z [223] 陈君毅, 陈磊, 蒙昊蓝, 等. 两车交互场景中的车辆交通协调性评价方法[J]. 汽车技术, 2020(11): 1-7.CHEN Jun-yi, CHEN Lei, MENG Hao-lan, et al. Evaluation method of the harmony with traffic in two-vehicle interaction scenarios[J]. Automobile Technology, 2020(11): 1-7. (in Chinese) [224] XIA Qin, DUAN Jian-li, GAO Feng, et al. Automatic generation method of test scenario for ADAS based on complexity[C]//SAE International. SAE Intelligent and Connected Vehicles Symposium. Warrendale: SAE International, 2017: 1-9. [225] 马依宁, 姜为, 吴靖宇, 等. 基于不同风格行驶模型的自动驾驶仿真测试自演绎场景研究[J]. 中国公路学报, 2023, 36(2): 216-228.MA Yi-ning, JIANG Wei, WU Jing-yu, et al. Self-evolution scenarios for simulation tests of autonomous vehicles based on different models of driving styles[J]. China Journal of Highway and Transport, 2023, 36(2): 216-228. (in Chinese) [226] XING Jing, MANNING C A. Complexity and automation displays of air traffic control: literature review and analysis[R]. Washington DC: US Department of Transportation, 2005. [227] XING Jing. Measures of information complexity and the implications for automation design[R]. Washington DC: US Department of Transportation, 2004. [228] CASTI J L. Connectivity, Complexity and Catastrophe in Large-Scale Systems[M]. New York: John Wiley and Sons, 1979. [229] CRUTCHFIELD J P, YOUNG K. Inferring statistical complexity[J]. Physical Review Letters, 1989, 63(2): 105-108. doi: 10.1103/PhysRevLett.63.105 [230] SUSSMAN J M. The new transportation faculty: the evolution to engineering systems[J]. Transportation Quarterly, 1999, 53(3): 15-26. [231] MA Yi-ning, PAN Xin-fu, XIONG Lu, et al. Definition and quantification of the complexity experienced by autonomous vehicles in the environment and driving task[C]// CICTP. 2020 COTA International Conference of Transportation Professionals. Reston: CICTP, 2020: 1030-1042. [232] ZHANG Ling-tong, MA Yi-ning, XING Xing-yu, et al. Research on the complexity quantification method of driving scenarios based on information entropy[C]//IEEE. 2021 IEEE International Intelligent Transportation Systems Conference (ITSC). New York: IEEE, 2021: 3476-3481. [233] BOELHOUWER A, BEUKEL A P V D, VOORT M C, et al. Determining infrastructure-and traffic factors that increase the perceived complexity of driving situations[C]//Springer. Advances in Human Aspects of Transportation: Proceedings of the AHFE 2020 Virtual Conference on Human Aspects of Transportation. Berlin: Springer, 2020: 3-10. [234] LIU Yong-kang, HANSEN J H L. Towards complexity level classification of driving scenarios using environmental information[C]//IEEE. 2019 IEEE Intelligent Transportation Systems Conference (ITSC). New York: IEEE, 2019: 810-815. [235] COVER T M, THOMAS J A. Elements of Information Theory[M]. New York: John Wiley and Sons, 2001. [236] MUELLER J, STANLEY L, MARTIN T, et al. Driving simulator and scenario effects on driver response[C]//ⅡSE. Proceedings of the 2014 Industrial and Systems Engineering Research Conference. Montreal: ⅡSE, 2014: 507-513. [237] WANG Jia-jie, ZHANG Chi, LIU Yue-hu, et al. Traffic sensory data classification by quantifying scenario complexity[C]//IEEE. 2018 IEEE Intelligent Vehicles Symposium (Ⅳ). New York: IEEE, 2018: 1543-1548. [238] GAO Feng, DUAN Jian-li, HE Ying-dong, et al. A test scenario automatic generation strategy for intelligent driving systems[J]. Mathematical Problems in Engineering, 2019, 2019: 1-10. [239] LOWRIE J W, THOMAS M, GREMBAN K, et al. The autonomous land vehicle (ALV) preliminary road-following demonstration[C]//SPIE. Intelligent Robots and Computer Vision Ⅳ. Washington DC: SPIE, 1985: 336-350. [240] POMERLEAU D. RALPH: rapidly adapting lateral position handler[C]//IEEE. Proceedings of the Intelligent Vehicles' 95. Symposium. New York: IEEE, 2002: 506-511. [241] BROGGI A, BERTOZZI M, FASCIOLI A. ARGO and the Mille Miglia in automatico tour[J]. IEEE Intelligent Systems and Their Applications, 1999, 14(1): 55-64. doi: 10.1109/5254.747906 [242] MAURER M, BEHRINGER R, FURST S, et al. A compact vision system for road vehicle guidance[C]//IEEE. Proceedings of 13th International Conference on Pattern Recognition. New York: IEEE, 1996: 313-317. [243] MCWILLIAMS G T, BROWN M A, LAMM R D, et al. Evaluation of autonomy in recent ground vehicles using the autonomy levels for unmanned systems (ALFUS) framework[C]// IEEE. Proceedings of the 2007 Workshop on Performance Metrics for Intelligent Systems. New York: ACM, 2007: 54-61. [244] WANG Yue-chao, LIU Jin-guo. Evaluation methods for the autonomy of unmanned systems[J]. Chinese science bulletin, 2012, 57(26): 3409-3418. doi: 10.1007/s11434-012-5183-2 [245] SUN Yang, CHEN Hui-yan. Research on test and evaluation of unmanned ground vehicles[J]. Acta Armamentarii, 2015, 36(6): 978-986. doi: 10.3969/j.issn.1000-1093.2015.06.003 [246] 陈君毅, 李如冰, 邢星宇, 等. 自动驾驶车辆智能性评价研究综述[J]. 同济大学学报(自然科学版), 2019, 47(12): 1785-1790, 1824. doi: 10.11908/j.issn.0253-374x.2019.12.014CEHN Jun-yi, LI Ru-bing, XING Xing-yu, et al. Survey on intelligence evaluation of autonomous vehicles[J]. Journal of Tongji University (Natural Science), 2019, 47(12): 1785-1790, 1824. (in Chinese) doi: 10.11908/j.issn.0253-374x.2019.12.014 [247] 蒙昊蓝, 陈君毅, 陈磊, 等. 基于自然驾驶数据的匝道行驶典型场景聚类分析[J]. 同济大学学报(自然科学版), 2021, 49(增1): 123-131.MENG Hao-lan, CHEN Jun-yi, CHEN Lei, et al. Clustering analysis of typical ramp scenarios based on naturalistic driving data[J]. Journal of Tongji University (Natural Science), 2021, 49(S1): 123-131. (in Chinese) [248] WEI Jun-qing, DOLAN J M, LITKOUHI B. Autonomous vehicle social behavior for highway entrance ramp management[C]//IEEE. 2013 IEEE Intelligent Vehicles Symposium (Ⅳ). New York: IEEE, 2013: 201-207. [249] LETTER C, ELEFTERIADOU L. Efficient control of fully automated connected vehicles at freeway merge segments[J]. Transportation Research Part C: Emerging Technologies, 2017, 80: 190-205. doi: 10.1016/j.trc.2017.04.015 [250] NTOUSAKIS I A, NIKOLOS I K, PAPAGEORGIOU M. Optimal vehicle trajectory planning in the context of cooperative merging on highways[J]. Transportation Research Part C: Emerging Technologies, 2016, 71: 464-488. doi: 10.1016/j.trc.2016.08.007 [251] PARMAR H, CHAKROBORTY P, KUNDU D. Modelling automobile drivers' toll-lane choice behaviour at a toll plaza using mixed logit model[J]. Procedia-Social and Behavioral Sciences, 2013, 104: 593-600. doi: 10.1016/j.sbspro.2013.11.153 [252] 陈君毅, 陈磊, 蒙昊蓝, 等. 基于神经网络的车辆交通协调性评价模型[J]. 同济大学学报(自然科学版), 2021, 49(1): 135-141.CHEN Jun-yi, CHEN Lei, MENG Hao-lan, et al. Evaluation model of harmony with traffic based on neural network[J]. Journal of Tongji University (Natural Science), 2021, 49(1): 135-141. (in Chinese) [253] VIRES. Virtual test drive[EB/OL]. (2022-11-11)[2022-11-03]. https://hexagon.com/products/virtual-test-drive .[254] NVIDIA. NVIDIA drive end-to-end solutions for autonomous vehicles[EB/OL]. (2022-01-13)[2022-11-03]. https://developer.nvidia.com/drive .[255] OICA. Future certification of automated/autonomous driving Systems[EB/OL]. (2019-01-28)[2022-11-03]. https://unece.org/fileadmin/DAM/trans/doc/2019/wp29grva/GRVA-02-09e.pdf .[256] 王润民, 赵祥模, 徐志刚, 等. 一种自动驾驶整车在环虚拟仿真测试平台设计[J]. 汽车技术, 2022(4): 1-7.WANG Run-min, ZHAO Xiang-mo, XU Zhi-gang, et al. Design of virtual simulation test platform based on vehicle-in-the-loop for automatic driving[J]. Automobile Technology, 2022(4): 1-7. (in Chinese) [257] SON T D, BHAVE A, VAN DER AUWERAER H. Simulation-based testing framework for autonomous driving development[C]// IEEE. 2019 IEEE International Conference on Mechatronics (ICM), New York: IEEE, 2019: 576-583. [258] 刘法旺, 曹建永, 张志强, 等. 基于场景的智能网联汽车"三支柱"安全测试评估方法研究[J]. 汽车工程学报, 2023, 13(1): 1-7.LIU Fa-wang, CAO Jian-yong, ZHANG Zhi-qiang, et al. A scenario-based "three-pillar" safety testing and assessment method for intelligent and connected vehicles[J]. Chinese Journal of Automotive Engineering, 2023, 13(1): 1-7. (in Chinese) [259] KIM B J, LEE S B. Safety evaluation of autonomous vehicles for a comparative study of camera image distance information and dynamic characteristics measuring equipment[J]. IEEE Access, 2022, 10: 18486-18506. doi: 10.1109/ACCESS.2022.3151075 [260] ZHANG Pei-xing, ZHU Bing, ZHAO Jian, et al. Safety evaluation method in multi-logical scenarios for automated vehicles based on naturalistic driving trajectory[J]. Accident Analysis and Prevention, 2023, 180: 106926. doi: 10.1016/j.aap.2022.106926 [261] 吴盛豪, 郑素丽, 杨璐琦. 国外自动驾驶汽车标准化发展趋势及其对我国的启示[J]. 标准科学, 2021(11): 16-24. doi: 10.3969/j.issn.1674-5698.2021.11.003WU Sheng-hao, ZHENG Su-li, YANG Lu-qi. Development trend of standardization of overseas autonomous vehicles and its enlightenment to China[J]. Standard Science, 2021(11): 16-24. (in Chinese) doi: 10.3969/j.issn.1674-5698.2021.11.003 [262] 贺锦鹏, 马芳武, 刘卫国, 等. 汽车前碰撞预警系统ISO 15623标准和NHTSA 26555评价规程对比试验[J]. 汽车技术, 2014(7): 28-33.HE Jin-peng, MA Fang-wu, LIU Wei-guo, et al. Comparative test between ISO 15623 on forward vehicle collision warning system and NHTSA 26555 assessment program[J]. Automobile Technology, 2014(7): 28-33. (in Chinese) [263] 曹建永, 曹寅, 张建文. 基于Euro-NCAP的汽车主动安全测试技术分析[J]. 质量与标准化, 2016(3): 55-58.CAO Jian-yong, CAO Yin, ZHANG Jian-wen. Analysis of vehicle active safety testing technology based on Euro-NCAP[J]. Quality and Standardization, 2016(3): 55-58. (in Chinese) [264] 唐波. ANCAP的先进碰撞试验技术[J]. 汽车与配件, 2013(9): 21-23.TANG Bo. Advanced crash test technology of ANCAP[J]. Automobile and Parts, 2013(9): 21-23. (in Chinese) [265] 郭飞, 赵磊, 党国峰. 汽车检测机构与C-NCAP体系研究[J]. 中国高新区, 2019(7): 36-37.GUO Fei, ZHAO Lei, DANG Guo-feng. Research on automobile detection organization and C-NCAP system[J]. Science and Technology Industry Parks, 2019(7): 36-37. (in Chinese) [266] PEREZ M A, KIEFER R J, HASKINS A, et al. Evaluation of forward collision warning system visual alert candidates and SAE J2400[J]. SAE International Journal of Passenger Cars-Mechanical Systems, 2009, 2(1): 750-764. doi: 10.4271/2009-01-0547 [267] 李海岩, 杨振, 贺丽娟, 等. 全球NCAP行人保护测评的对比研究及展望[J]. 汽车工程, 2021, 43(5): 730-738.LI Hai-yan, YANG Zhen, HE Li-juan, et al. Comparative study and prospect of pedestrian protection assessment in global NCAP[J]. Automotive Engineering, 2021, 43(5): 730-738. (in Chinese) [268] 王玉梅, 郭庆祥. Euro-NCAP更新对乘用车安全评价的影响[J]. 汽车工程师, 2014(4): 18-22. doi: 10.3969/j.issn.1674-6546.2014.04.003WANG Yu-mei, GUO Qing-xiang. Effect on updated Euro-NCAP on safety evaluation for a passenger car[J]. Automotive Engineer, 2014(4): 18-22. (in Chinese) doi: 10.3969/j.issn.1674-6546.2014.04.003 [269] 林高泽, 杨海燕, 周大永, 等. E-NCAP V8.0与J-NCAP行人保护性能试验规程对比[J]. 汽车工程师, 2015(12): 13-17.LIN Gao-ze, YANG Hai-yan, ZHOU Da-yong, et al. Pedestrian protection test method comparison between E-NCAP V8.0 and J-NCAP[J]. Automotive Engineer, 2015(12): 13-17. (in Chinese) [270] 王云鹏. 坚守安全底线加强监管创新—构建包容审慎的汽车安全沙盒监管制度[J]. 中国市场监管研究, 2022(4): 5-6, 54.WANG Yun-peng. Insisting on safety base line and enhancing regulation innovation—build an inclusive and prudent vehicle safety sandbox regulatory system[J]. Research on China Market Supervision, 2022(4): 5-6, 54. (in Chinese) [271] 王乐兵. 自动驾驶汽车的缺陷及其产品责任[J]. 清华法学, 2020, 14(2): 93-112.WANG Le-bing. Defects in autonomous vehicles and their product liability[J]. Tsinghua Law Review, 2020, 14(2): 93-112. (in Chinese) [272] GAO Zhi-wei, CECATI C, DING S X. A survey of fault diagnosis and fault-tolerant techniques—part Ⅰ: fault diagnosis with model-based and signal-based approaches[J]. IEEE Transactions on Industrial Electronics, 2015, 62(6): 3757-3767. doi: 10.1109/TIE.2015.2417501 [273] JIANG Yu-chen, YIN Shen, KAYNAK O. Optimized design of parity relation-based residual generator for fault detection: data-driven approaches[J]. IEEE Transactions on Industrial Informatics, 2021, 17(2): 1449-1458. doi: 10.1109/TII.2020.2987840 [274] ZHANG Zi-long, ZHAO Zhi-bin, LI Xiao-long, et al. Faster multiscale dictionary learning method with adaptive parameter estimation for fault diagnosis of traction motor bearings[J]. IEEE Transactions on Instrumentation and Measurement, 2020, 70: 3504113. [275] CHOI K, KIM Y, KIM S K, et al. Current and position sensor fault diagnosis algorithm for PMSM drives based on robust state observer[J]. IEEE Transactions on Industrial Electronics, 2021, 68(6): 5227-5236. doi: 10.1109/TIE.2020.2992977 [276] GAO Zhi-wei, CECATI C, DING S X. A survey of fault diagnosis and fault-tolerant techniques—part Ⅱ: fault diagnosis with knowledge-based and hybrid/active approaches[J]. IEEE Transactions on Industrial Electronics, 2015, 62(6): 3768-3774. [277] BEN LAKHAL N M, ADOUANE L, NASRI O, et al. Interval-based solutions for reliable and safe navigation of intelligent autonomous vehicles[C]//IEEE. 2019 12th International Workshop on Robot Motion and Control (RoMoCo). New York: IEEE, 2019: 124-130. [278] BANDO M, ONO Y, HIEIDA Y, et al. GNSS fault detection with unmodeled error[J]. Advanced Robotics, 2017, 31(15): 763-779. [279] LIU Jing, WEI Yan-hui, HAO Sheng-gong. A fault diagnosis method for INS/DVL/USBL integrated navigation system based on support vector regression[C]//IEEE. OCEANS 2019-Marseille. New York: IEEE, 2019: 1-8. . [280] VAN WYK F, WANG Yi-yang, KHOJANDI A, et al. Real-time sensor anomaly detection and identification in automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(3): 1264-1276. [281] KANAPRAM D T, MARIN-PLAZA P, MARCENARO L, et al. Self-awareness in intelligent vehicles: feature based dynamic Bayesian models for abnormality detection[J]. Robotics and Autonomous Systems, 2020, 134: 103652. [282] AN J, CHO S. Variational autoencoder based anomaly detection using reconstruction probability[J]. Special Lecture on IE, 2015, 2(1): 1-18. [283] PANG Guan-song, SHEN Chun-hua, CAO Long-bing, et al. Deep learning for anomaly detection: a review[J]. ACM Computing Surveys, 2021, 54(2): 1-38. [284] CHI Yuan-fang, DONG Yan-jie, WANG Z J, et al. Knowledge-based fault diagnosis in industrial internet of things: a survey[J]. IEEE Internet of Things Journal, 2022, 9(15): 12886-12900. [285] KHALASTCHI E, KALECH M. On fault detection and diagnosis in robotic systems[J]. ACM Computing Surveys, 2018, 51(1): 1-24. [286] SANDOVAL-PILLAJO L, TARUPI A, BASANTES A, et al. Expert system for diagnosis of motor failures in electronic injection vehicles[C]//IEEE. 2019 International Conference on Information Systems and Computer Science (INCISCOS). New York: IEEE, 2019: 259-266. [287] 刘磊. 装备智能故障诊断及测试性验证与评价方法研究[D]. 郑州: 郑州大学, 2017.LIU Lei. Research on intelligent fault diagnosis and testability verification and evaluation methods of equipment[D]. Zhengzhou: Zhengzhou University, 2017. (in Chinese) [288] 邓露, 许爱强, 赵秀丽. 基于故障属性的测试性验证试验样本分配方案[J]. 测试技术学报, 2014, 28(2): 103-107.DENG Lu, XU Ai-qiang, ZHAO Xiu-li. Allocation plan of samples based on failure attribute in testability demonstration test[J]. Journal of Test and Measurement Technology, 2014, 28(2): 103-107. (in Chinese) [289] 余思奇, 景博, 黄以锋. 基于贡献度的测试性验证试验样本分配方案研究[J]. 中国测试, 2015, 41(2): 91-95.YU Si-qi, JING Bo, HUANG Yi-feng. Study on allocation scheme of failure sample in testability validation tests based on contribution[J]. China Measurement and Test, 2015, 41(2): 91-95. (in Chinese) [290] 李天梅. 装备测试性验证试验优化设计与综合评估方法研究[D]. 长沙: 国防科学技术大学, 2010.LI Tian-mei. Research on optimization design and integrated evaluation of testability verification test for equipments[D]. Changsha: National University of Defense Technology, 2010. (in Chinese) [291] 石君友, 康锐, 田仲. 基于信息模型的测试性试验样本集充分性研究[J]. 北京航空航天大学学报, 2005, 31(8): 874-878.SHI Jun-you, KANG Rui, TIAN Zhong. Study on sufficiency of sample set in testability demonstration based on information model[J]. Journal of Beijing University of Aeronautics and Astronautics, 2005, 31(8): 874-878. (in Chinese) [292] 冯浩. 高速公路自动驾驶系统感知模块预期功能安全研究[D]. 长春: 吉林大学, 2022.FENG Hao. Research on safety of the intended functionality of perception module for highway pilot system[D]. Changchun: Jilin University, 2022. (in Chinese) [293] PRⅡSALU M, PIRINEN A, PADURARU C, et al. Generating scenarios with diverse pedestrian behaviors for autonomous vehicle testing[C]//PMLR. Proceedings of the 5th Conference on Robot Learning. New York: PMLR, 2021: 1247-1258. [294] 360智能网联汽车安全实验室. 智能网联汽车信息安全发展趋势分析[J]. 智能网联汽车, 2020(3): 54-63.360 Intelligent and Connected Vehicle Security Laboratory. Analysis on the development trend of intelligent network automobile information security[J]. Intelligent Connected Vehicles, 2020(3): 54-63. (in Chinese) [295] KIM K, KIM J S, JEONG S, et al. Cybersecurity for autonomous vehicles: review of attacks and defense[J]. Computers and Security, 2021, 103: 102150. [296] PHAM M, XIONG Kai-qi. A survey on security attacks and defense techniques for connected and autonomous vehicles[J]. Computers and Security, 2021, 109: 102269. [297] 周媛媛. 车联网信息安全测试技术分析及应用[J]. 北京汽车, 2020(2): 23-27.ZHOU Yuan-yuan. Analysis and application of Internet of vehicles information security testing technology[J]. Beijing Automotive Engineering, 2020(2): 23-27. (in Chinese) [298] 刘法旺, 李艳文. 自动驾驶系统功能安全与预期功能安全研究[J]. 工业技术创新, 2021, 8(3): 62-68.LIU Fa-wang, LI Yan-wen. Research on functional safety and safety of the intended functionality for automated driving system[J]. Industrial Technology Innovation, 2021, 8(3): 62-68. (in Chinese) [299] 邹博松, 朱科屹, 王卉捷. 智能网联汽车信息安全测试及分析[J]. 智能网联汽车, 2020(6): 56-58.ZOU Bo-song, ZHU Ke-yi, WANG Hui-jie. Test and analysis of intelligent network automobile information security[J]. Intelligent Connected Vehicle, 2020(6): 56-58. (in Chinese) -

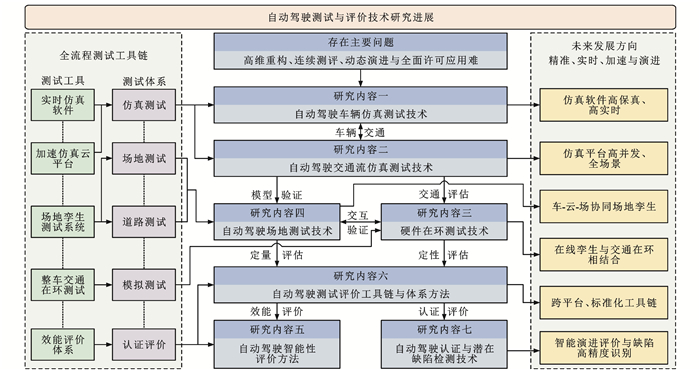
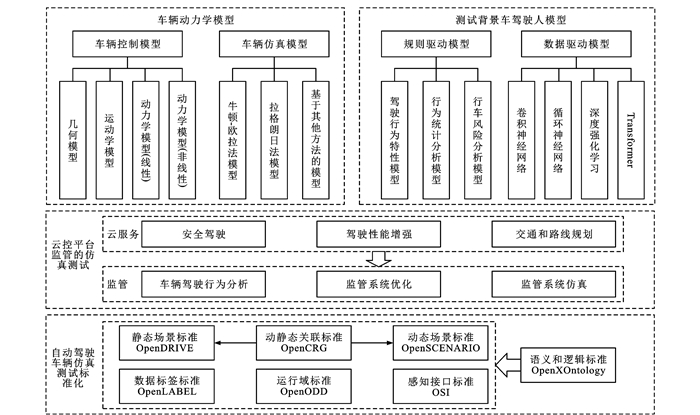
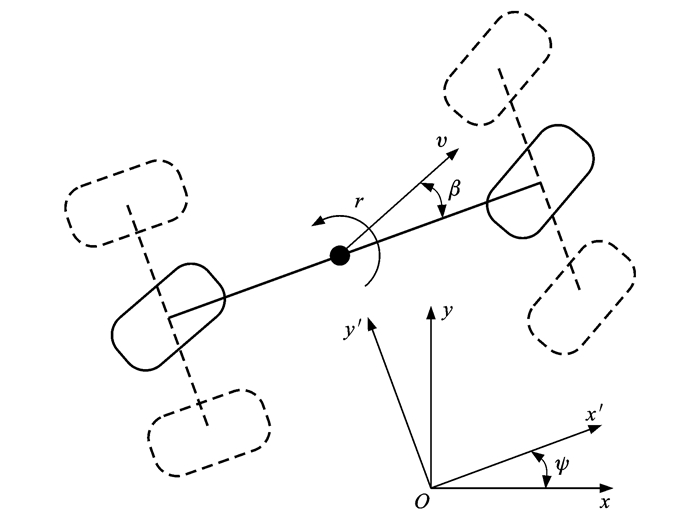
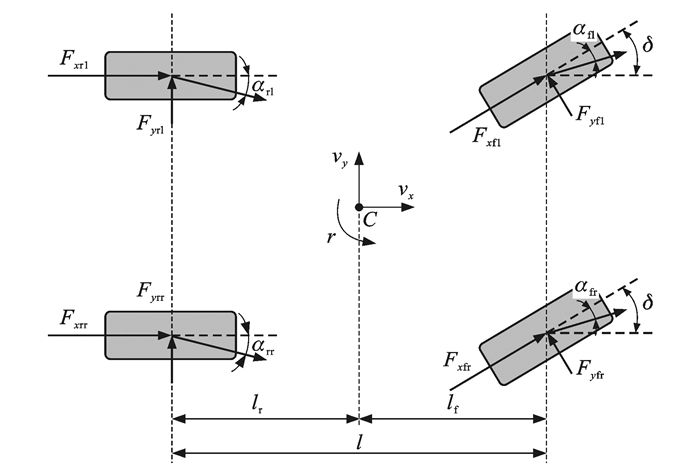
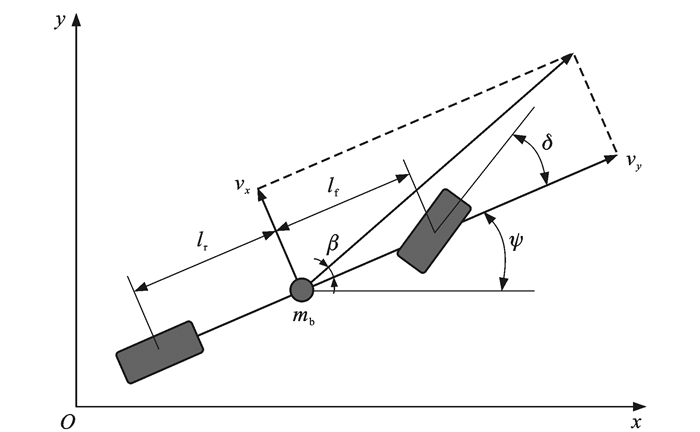
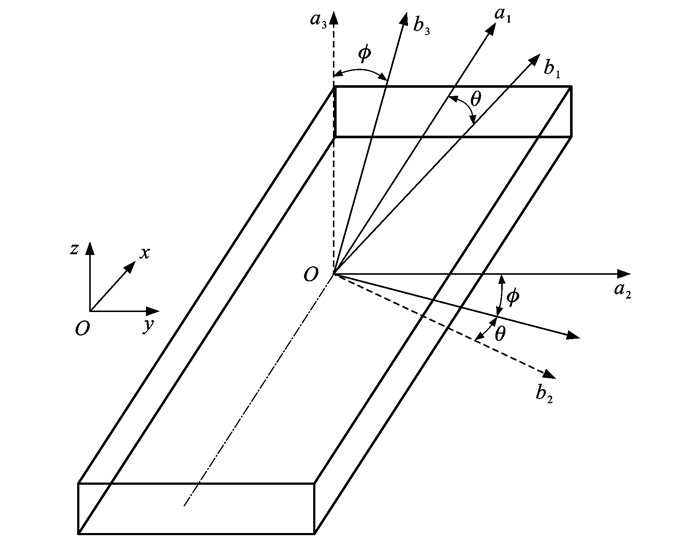
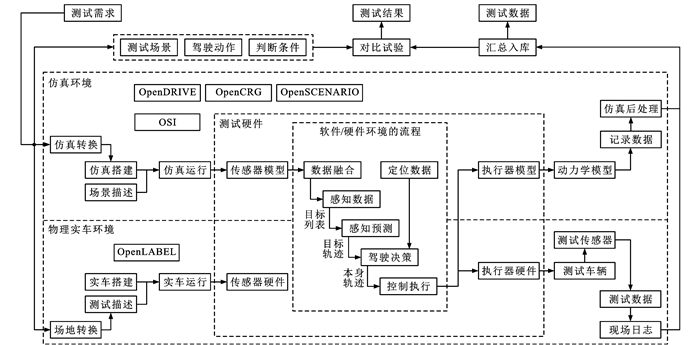
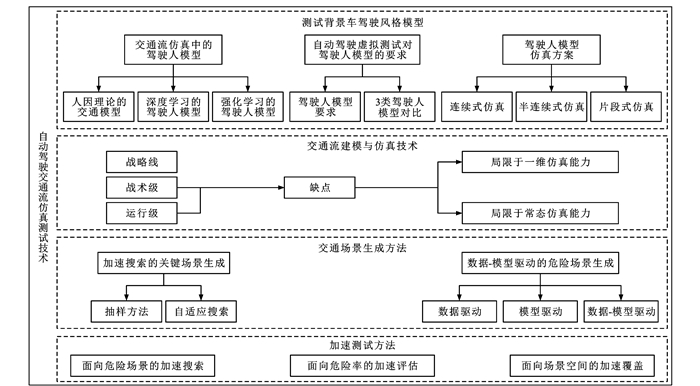
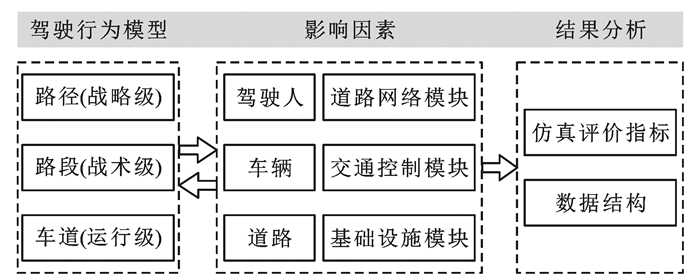

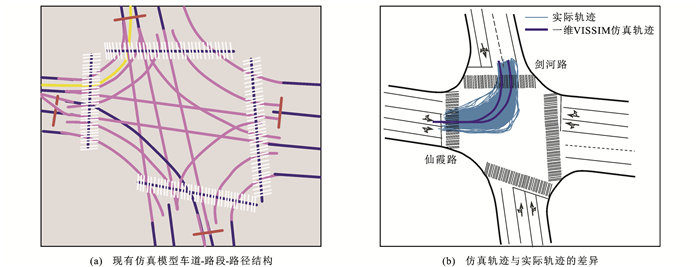
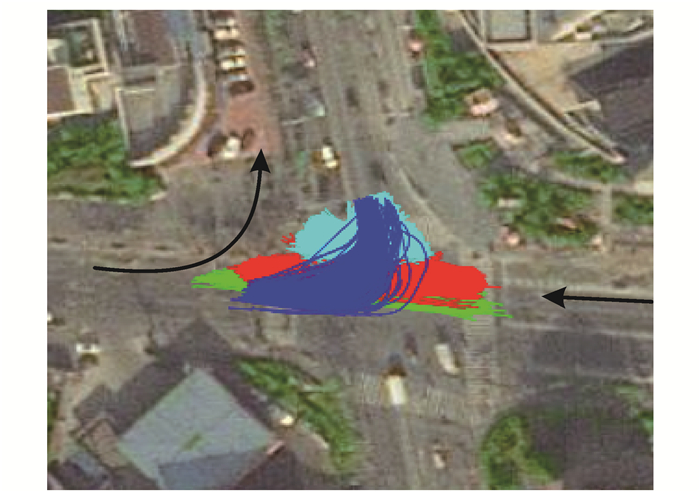
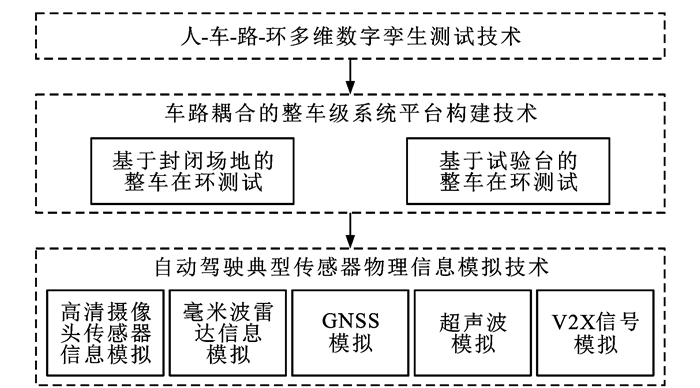
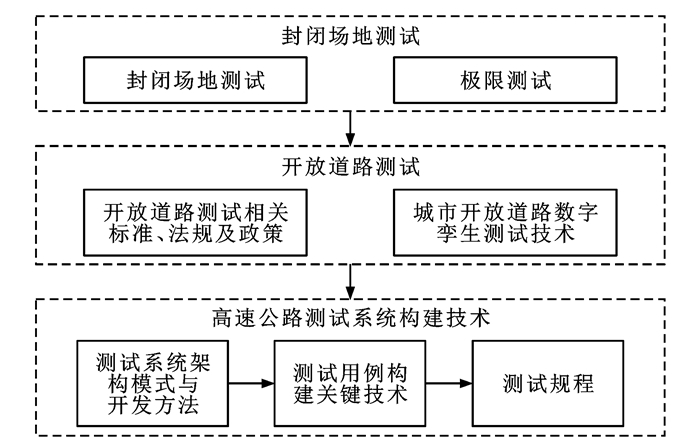
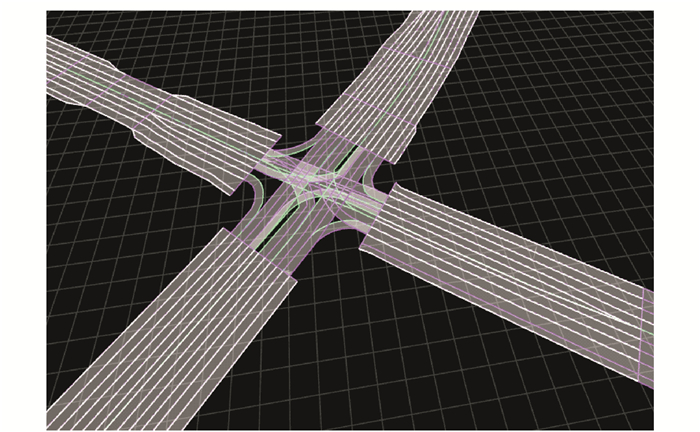

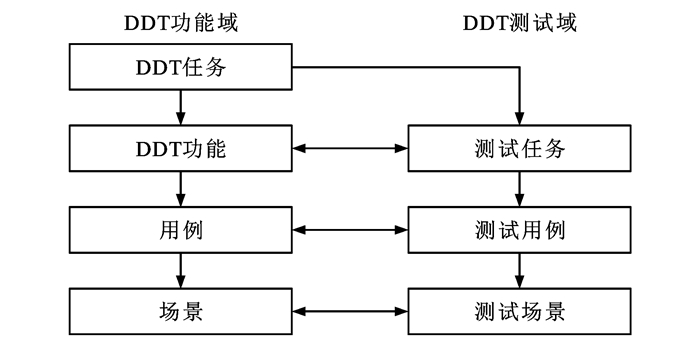
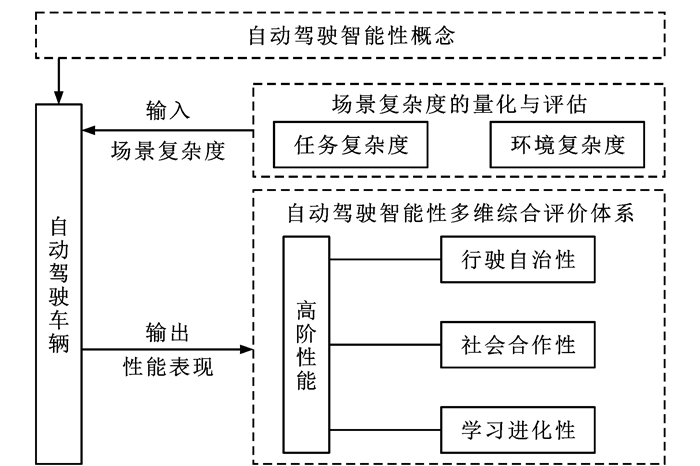
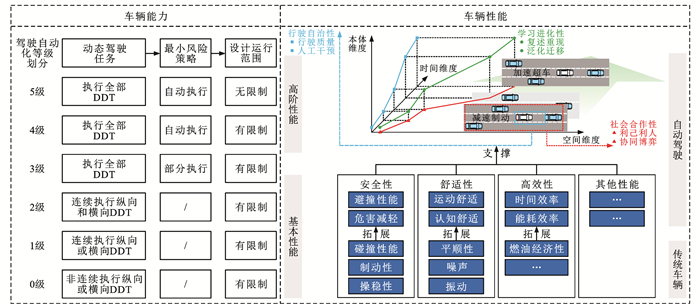
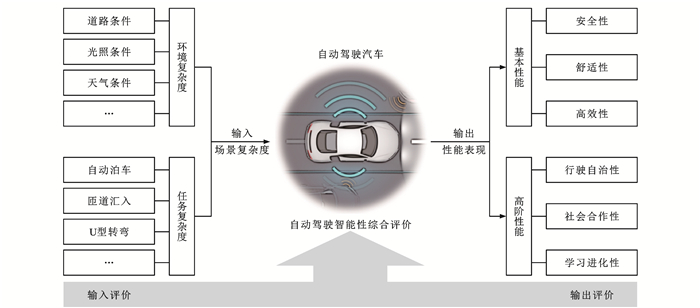
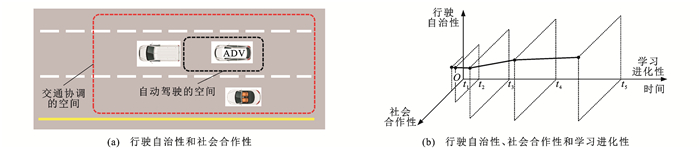
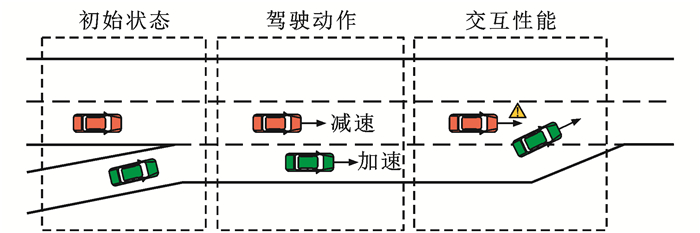
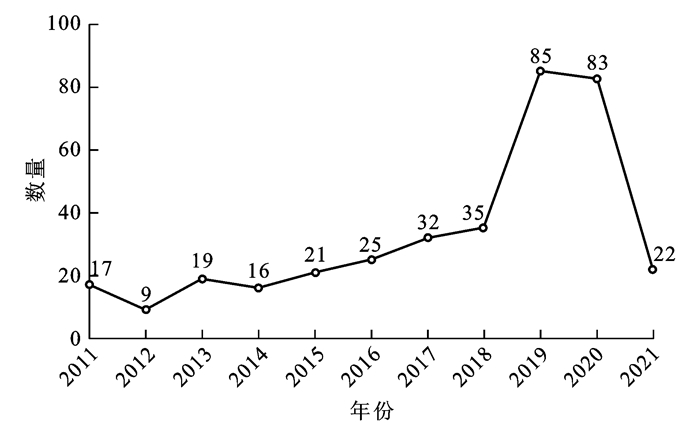
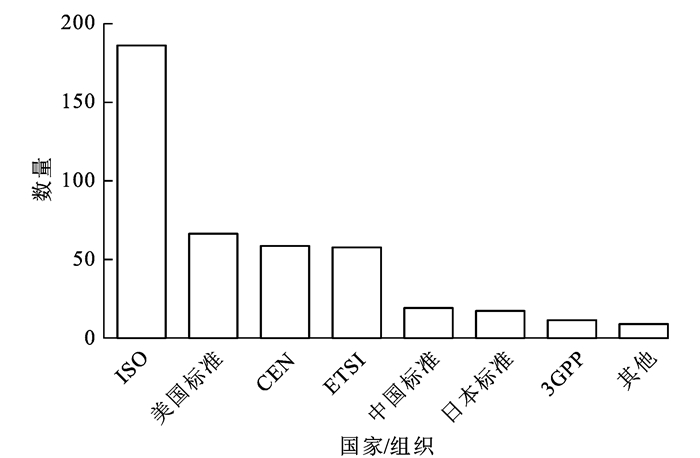
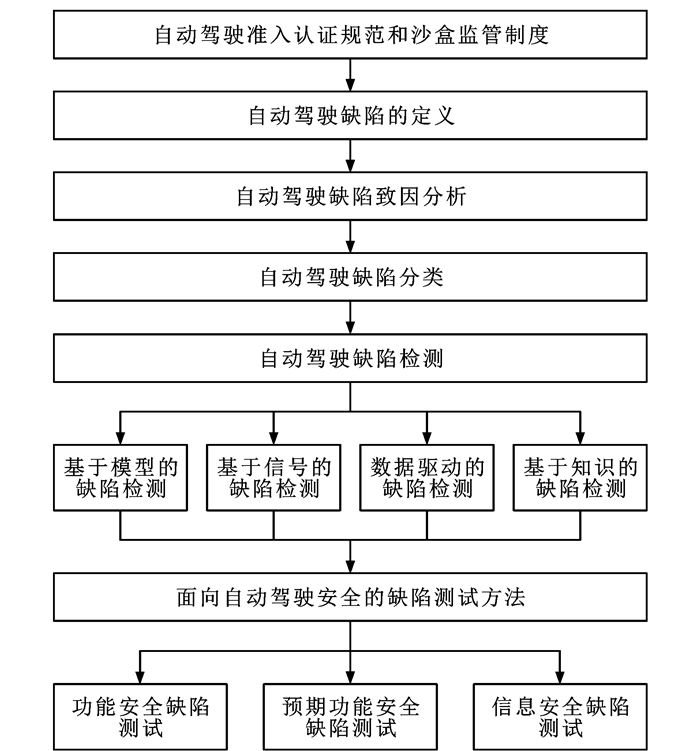
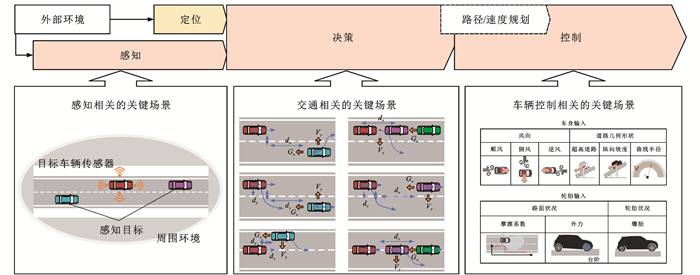
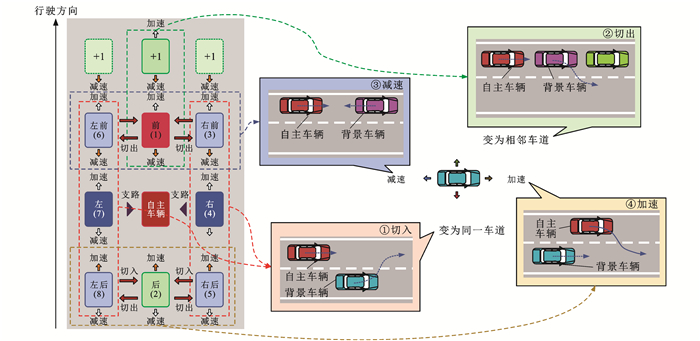
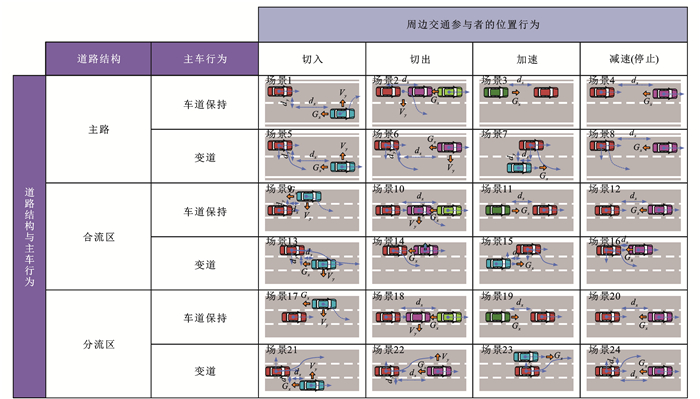
 点击查看大图
点击查看大图
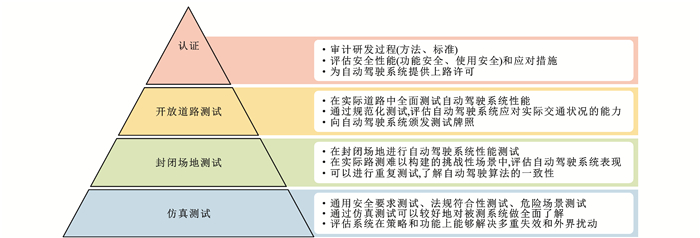
计量
- 文章访问数: 1031
- HTML全文浏览量: 199
- PDF下载量: 263
- 被引次数: 0
